
































 Военное дело
Военное делоПохожие презентации:



")



")


Первоначальная настройка. Установка QGroundControl
1.
2.
ПЕРВОНАЧАЛЬНАЯ НАСТРОЙКАУстановка QGroundControl
• QGroundControl – программное обеспечение, необходимое для прошивки, настройки и
калибровки полетного контроллера Клевера.
3.
MICROSD-КАРТА• Подготовить MicroSD-карту для полетного контроллера.
1.Установить карту в компьютер (использовать
адаптер при необходимости).
2.Отформатировать карту в файловую систему FAT32.
Для этого кликнуть на значок SD-карты в "Проводнике"
и нажать "Форматирование" в Windows.
3.Выполнить "Безопасное извлечение" карты, извлечь
карту.
4.Установить карту в полетный контроллер.
4.
ЗАГРУЗКА ПРОШИВКИ В ПОЛЕТНЫЙКОНТРОЛЛЕР
1. Для использования всех наиболее
актуальных функций PX4 вы также
можете использовать последнюю
официальную версию прошивки (в
экспериментальном режиме).
2. Отключить полетный контроллер
от компьютера (если он
подключен).
3. Запустить программу
QGroundControl.
4. Перейти в панель Vehicle Setup (кликнув на логотип QGroundControl в левом верхнем углу) и
выбрать меню Firmware.
5. Подключить полетный контроллер к компьютеру по USB.
6. Выбрать в появившемся меню справа PX4 Flight Stack.
5.
6.Для загрузки прошивки COEX:
– Выбрать Advanced settings.
– В выпадающем меню выберать Custom firmware file...
– Нажать OK и выбрать скаченный файл прошивки.
Для загрузки последней версии стандартной прошивки сразу нажать OK.
Дождаться, пока QGroundControl загрузит прошивку и выполнит перезагрузку полетного
контроллера.
6.
• Обзор главного окна настроек QGroundControl:1.Параметры, нуждающиеся в
настройке: Airframe, Radio, Sen
sors, Flight Modes.
2.Текущая прошивка
контроллера.
3.Текущий полетный режим.
4.Сообщения об ошибках.
7.
ВЫБОР РАМЫ• Зайти во вкладку Vehicle Setup.
• Выбрать меню Airframe.
• Выбрать тип рамы Quadrotor X.
• Для Клевера 4 выбрать подтип
рамы COEX Clover 4. В ином
случае – Generic Quadrotor X.
• Переместиться в начало списка
и нажать кнопку Apply and
Restart, подтвердить
нажатием Apply.
• Дождаться применения
настроек и перезагрузки
полетного контроллера.
8.
ПАРАМЕТРЫ• Для настройки параметров полетного
контроллера войти во вкладку Vehicle Setup и
выбрать меню Parameters. Вы можете
использовать поле Search для поиска
параметров по имени.
• После установки параметра необходимо
нажать кнопку Save. При необходимости –
перезагрузить полетный контроллер, нажав
кнопку Tools, затем Reboot vehicle.
9.
ПАРАМЕТРЫ CIRCUIT BREAKER• Чтобы коптер мог летать с подключением по USB, установите параметр
CBRK_USB_CHK в 197848.
• Отключите проверку Safety Switch: CBRK_IO_SAFETY= 22027.
10.
КАЛИБРОВКА ДАТЧИКОВ• Чтобы откалибровать датчики необходимо зайти во вкладку Vehicle Setup и выбрать
меню Sensors.
11.
КОМПАС1.
Выбрать меню Compass.
2.
Выбрать ориентацию полетного
контроллера – ROTATION_NONE при
условии, что полетный контроллер
ориентирован передом к носу
квадрокоптера.
3.
Нажать OK.
4.
Последовательно устанавливать
квадрокоптер в каждую из указанных
ориентаций до появления желтой рамки.
5.
Вращать квадрокоптер по направлению
стрелки до появления зеленой рамки.
12.
ГИРОСКОП1.Выбрать меню Gyroscope
2.Установить квадрокоптер на ровную
поверхность.
3.Нажать OK.
4.Дождаться окончания калибровки.
13.
АКСЕЛЕРОМЕТР1.
Выбрать меню Accelerometer.
2.
Выбрать ориентацию полетного контроллера –
ROTATION_NONE при условии, что полетный
контроллер ориентирован передом к носу
квадрокоптера.
3.
Последовательно устанавливать квадрокоптер в
каждую из указанных ориентаций до появления
желтой рамки.
4.
Держать квадрокоптер неподвижно до появления
зеленой рамки.
14.
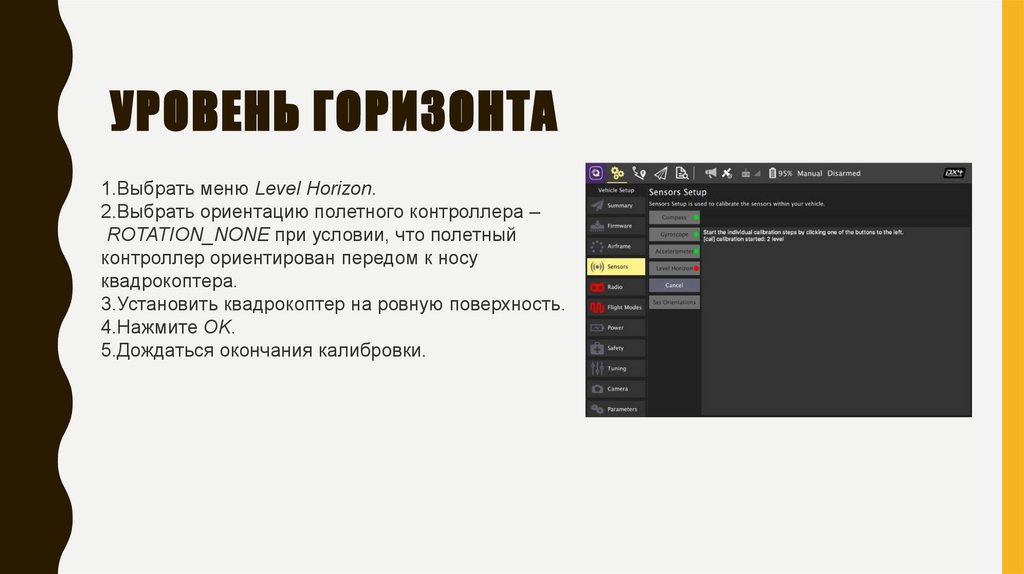
УРОВЕНЬ ГОРИЗОНТА1.Выбрать меню Level Horizon.
2.Выбрать ориентацию полетного контроллера –
ROTATION_NONE при условии, что полетный
контроллер ориентирован передом к носу
квадрокоптера.
3.Установить квадрокоптер на ровную поверхность.
4.Нажмите OK.
5.Дождаться окончания калибровки.
15.
НАСТРОЙКА ПУЛЬТА• Перед подключением и
калибровкой пульта убедиться,
что:
• К коптеру не подключено
внешнее питание АКБ.
• Пропеллеры не установлены на
моторах.
16.
ПОДКЛЮЧЕНИЕ ПУЛЬТА1.
В программе QGroundControl перейти в
панель Vehicle Setup и выбрать меню Radio.
2.
Включить пульт, переводя
переключатель POWER в верхнее положение.
3.
Убедиться, что связь с приемником
установлена.
На ЖК Экране пульта высвечивается индикация:
Светодиод на приемнике должен гореть
непрерывно красным.
17.
ПУЛЬТ ЗАБЛОКИРОВАН• Если пульт заблокирован, то на ЖК Экране будет
отображено предупреждение: Warning. Place all
switches in their up position and lower the throttle.
• Для разблокировки пульта необходимо привести
все стики и переключатели в исходное
положение:
• Левый стик (1) в центральной нижней позиции.
• Переключатели A, B, C, D (2) в положение "от
себя".
• Правый стик (3) в центре.
18.
НЕТ СВЯЗИ С ПРИЕМНИКОМ• Для проверки соединения пульта с приемником, включите пульт и обратите внимание
на индикацию на ЖК экране.
1.
Соединение с приемником отсутствует:
2.
Соединение с приемником установлено
19.
• Если соединение отсутствует, то:1.
Проверить, что приемник включен (моргает красный светодиод). Если светодиод
горит непрерывно красным, то значит связь установлена с другим пультом.
2.
Провести процедуру сопряжения пульта и приемника.
20.
РАБОТА С ПРИЁМНИКОМ FLYSKY FS-A8S• Приёмник Flysky FS-A8S совместим с пультами Flysky FS-i6 и FS-i6x. Связь с полётным
контроллером может происходить как с использованием аналогового протокола PPM,
так и при помощи цифровых протоколов S.Bus/i-Bus.
• Для подключения к полётному контроллеру рекомендуется использовать протокол
S.Bus.
21.
СОПРЯЖЕНИЕ ПРИЁМНИКА С ПУЛЬТОМ• Для сопряжения приёмника с пультом:
1.
Убедиться, что полётный контроллер выключен.
2.
Зажать кнопку BIND на приёмнике:
3.
Включить полётный контроллер. Светодиод на
приёмнике должен замигать с высокой частотой.
22.
4.Зажать клавишу BIND KEY на пульте и включить его. На пульте должно появиться
сообщение RX Binding...
23.
5.Светодиод на приёмнике должен замигать с низкой частотой.
6.
Выключить и включить пульт. Светодиод на приёмнике должен светиться
непрерывно.
24.
ВЫБОР РЕЖИМА ПРИЁМНИКА• Открыть QGroundControl и подключить полётный контроллер к компьютеру. Открыть
вкладку Radio:
25.
• Если справа (под изображением пульта) не показано ни одного канала, зажатькнопку BIND на приёмнике на 2 секунды. Должно появиться 18 каналов:
26.
НЕТ СВЯЗИ С ПОЛЕТНЫМКОНТРОЛЛЕРОМ
• Если нет связи с полетным контроллером, то на экране
монитора компьютера в окне Channel Monitor не будут
отображаться изменения положения слайдеров при
перемещении стиками пульта.
1.
Зайти в меню (удерживать нажатой кнопку ОК).
2.
Выбрать меню System setup (Кнопки Up/Down - для
навигации, кнопка ОК — подтверждение выбора.
3.
Выбрать RX setup > PPM OUTPUT > “On.
4.
Сохранить изменения (удерживать нажатой
кнопку CANCEL).
27.
ПОЛЕТНЫЕ РЕЖИМЫ• Режим полетного контроллера PX4 определяет, как именно квадрокоптер (или другой
аппарат) должен себя вести: каким образом интерпретировать входящие команды и сигналы
с пульта. Режим переключается одним из переключателей на пульте радиоуправления.
• Чтобы настроить полетные режимы:
1.
В программе QGroundControl перейти в панель Vehicle Setup.
2.
Выберать меню Flight Modes.
3.
Установить переключатель режимов (Mode Channel) на переключатель SwC (Channel 6).
4.
Опционально, установить экстренное отключение пропеллеров (Emergency Kill Switch
Channel) на переключатель SwA (Channel 5).
28.
5.Выбрать необходимые полетные режимы.
6.
Рекомендуемые полетные режимы:
– Flight Mode 1: Stabilized.
– Flight Mode 4: Altitude.
– Flight Mode 6: Position.
7.
Проверить корректность переключения режимов, переключая переключатель на пульте.
8.
Назначить аварийное отключение моторов (Kill switch) на переключатель SwA (Channel
5).
29.
ПОДРОБНОЕ ОПИСАНИЕ ПОЛЕТНЫХРЕЖИМОВ
Ручное управление
• При ручном управлении пилот управляет квадрокоптером напрямую. GPS, данные с
компьютерного зрения и барометр не используются. Для полетов в этих режимах
необходимы хорошие навыки пилотирования мультикоптеров.
• STABILIZED/MANUAL — режим стабилизации горизонтального положения. Управление
газом, углами наклона коптера по тангажу и крену, угловой скоростью по рысканью.
• ACRO — управление газом и угловой скоростью коптера по тангажу, крену и рысканью.
Используется дрон-рейсерами и в шоу 3D-пилотирования для выполнения трюков.
• RATTITUDE — в центре правый стик аналогичен STABILIZED, по краям переходит в режим
ACRO.
30.
С использованием дополнительных датчиков• ALTCTL (Altitude) — управление скоростью изменения высоты полета, углами по тангажу
и крену и угловой скоростью по рысканью. Используется барометр (или иной датчик
высоты).
• POSCTL (Position) — управление скоростями набора высоты, скоростью движения
вперед/назад и вправо/влево, угловой скоростью по рысканью. Наиболее простой для
полетов режим. Используется барометр, GPS, компьютерное зрение, другие датчики.
31.
Автоматический полетВ этих режимах квадрокоптер игнорирует сигналы с пульта и летает по какой-либо автоматической
программе.
• OFFBOARD — управление полетом с внешнего компьютера (например, Raspberry Pi). Этот режим
используется в Клевере для программирования автономных полетов.
• AUTO.MISSION – квадрокоптер выполняет заранее загруженную в квадрокоптер миссию. Миссия
загружается при помощи QGroundControl, или по MAVLink. Этот режим чаще всего применяется для
автоматических полетов по точкам с использованием GPS, например, для фотограмметрии.
• AUTO.RTL – коптер автоматически возвращается в точку взлета.
• AUTO.LAND – коптер выполняет посадку.
32.
НАСТРОЙКА ПИТАНИЯ• Чтобы откалибровать параметры, связанные с электропитанием, необходимо зайти во
вкладку Vehicle Setup и выбрать меню Power.
Калибровка делителя напряжения
1.
2.
3.
В программе QGroundControl необходимо перейти в панель Vehicle Setup и выбрать
меню Power.
Установить параметр Number of cells в соответствии с количеством банок в АКБ (3S для
Клевера 4).
Инструкция калибровки делителя напряжения:
– Подключить индикатор напряжения к балансировочному разъему АКБ.
– Нажать кнопку Calculate напротив надписи Voltage Divider.
– Ввести в открывшемся поле суммарное значение напряжения с индикатора напряжения.
– Нажать Close, чтобы сохранить рассчитанное значение.
В случае отсутствия индикатора напряжения или невозможности ручной калибровки,
установить усредненное значение делителя напряжения для комплекта Клевер 4 (Voltage
divider = 11).
33.
КАЛИБРОВКА РЕГУЛЯТОРОВ (ESC)1.
Убедиться, что АКБ не
подключена и пропеллеры сняты
2.
Нажать Calibrate.
3.
После появлении надписи Connect
the battery now подсоединить АКБ.
4.
Дождаться появления
надписи Calibration complete.
34.
НАСТРОЙКА FAILSAFEВо вкладке Safety настраиваются реакции
квадрокоптера на различные нештатные
ситуации. Рекомендуется включить как
минимум реакцию на потерю связи с пультом
управления:
1.
В программе QGroundControl перейти в
панель Vehicle Setup и выбрать
меню Safety.
2.
В блоке RC Loss FailsafeTrigger выбрать
один из рекомендуемых вариантов
реакции на потерю связи с пультом:
– Land mode – переход в режим посадки;
– Terminate – аварийное отключение моторов.
3.
В поле RC LossTimeout выбрать значение
таймаута, по истечении которого связь с
пультом считается потерянной.
Рекомендуемое значение – 2 s.