 Промышленность
ПромышленностьПохожие презентации:










Особенности законов управления автопилотов угла тангажа
1.
Лекция 14Особенности законов управления автопилотов угла
тангажа.
14.1. СПОСОБЫ ОБЕСПЕЧЕНИЯ АСТАТИЗМА КОНТУРА
Для обеспечения астатизма контура тангажа применяются
три основных способа.
1. Первый способ основан на интегрирующих свойствах
сервопривода, охваченного изодромной обратной связью.
2. Второй способ предполагает введение в закон управления
автопилота
сигнала,
пропорционального
интегралу
от
рассогласования по углу тангажа.
3. Третий
способ
предусматривает
использование
дополнительного параллельного интегрирующего сервопривода.
1
2.
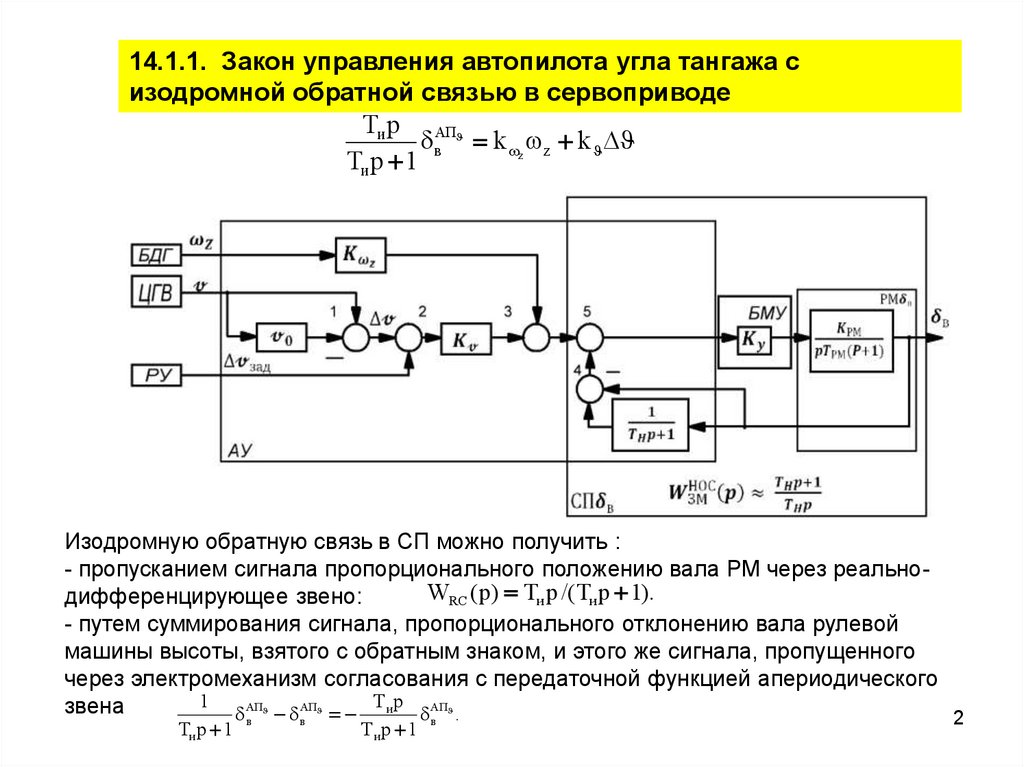
14.1.1. Закон управления автопилота угла тангажа сизодромной обратной связью в сервоприводе
Tи p АП
в k z z k
Tи p 1
Изодромную обратную связь в СП можно получить :
- пропусканием сигнала пропорционального положению вала РМ через реальноWRC (p) Tи p /(Tи p 1).
дифференцирующее звено:
- путем суммирования сигнала, пропорционального отклонению вала рулевой
машины высоты, взятого с обратным знаком, и этого же сигнала, пропущенного
через электромеханизм согласования с передаточной функцией апериодического
1
Т p
звена
АП АП и АП .
Tи p 1
в
в
Тиp 1
в
2
3.
В структурной схеме аналогового электромеханического автопилотаугла тангажа с изодромной обратной связью в сервоприводе на выходе
сумматора 4 имеем
1
Т p
вАП вАП и вАП .
Tи p 1
Тиp 1
На выходе сумматора 2 имеем
зад
На выходе сумматора 5 имеем закон управления
Tи p АП
в k z z k
Tи p 1
Таким образом обеспечивается стабилизация и управление углом тангажа
самолетов Ил-62 и Ил-86 с помощью системы САУ-1Т-2.
3
4.
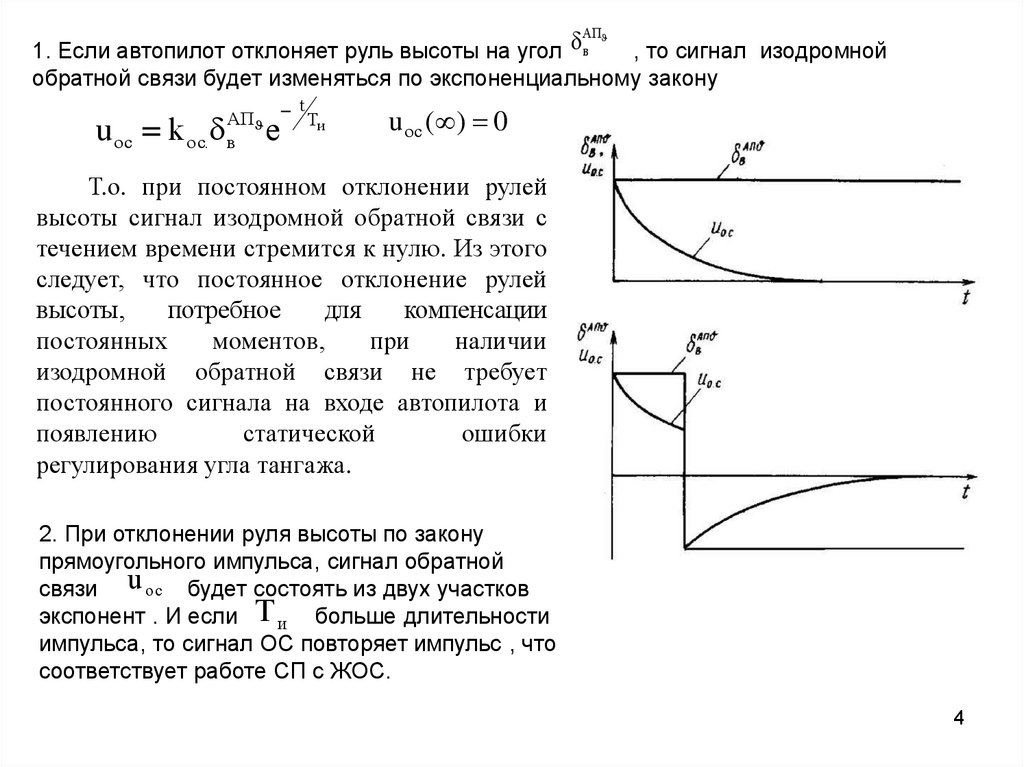
АП1. Если автопилот отклоняет руль высоты на угол в
, то сигнал изодромной
обратной связи будет изменяться по экспоненциальному закону
u ос k
АП
ос. в
e
t
Tи
u ос ( ) 0
Т.о. при постоянном отклонении рулей
высоты сигнал изодромной обратной связи с
течением времени стремится к нулю. Из этого
следует, что постоянное отклонение рулей
высоты,
потребное
для
компенсации
постоянных
моментов,
при
наличии
изодромной обратной связи не требует
постоянного сигнала на входе автопилота и
появлению
статической
ошибки
регулирования угла тангажа.
2. При отклонении руля высоты по закону
прямоугольного импульса, сигнал обратной
связи u ос будет состоять из двух участков
экспонент . И если Т и больше длительности
импульса, то сигнал ОС повторяет импульс , что
соответствует работе СП с ЖОС.
4
5.
Т.о. сигнал изодромной обратной связи с большой постоянной времени прибыстрых движениях руля будет близок к сигналу жесткой обратной связи.
Движение самолета по углу тангажа является быстрым движением,
совершающимся в течение 1-2 с. Это движение обеспечивается отклонением
рулей высоты на короткие отрезки времени длительностью в десятые доли
Ти = 2 - 3 с
секунды. Постоянная времени изодромной обратной связи
обеспечивает в этом случае сигнал обратной связи, аналогичный тому, какой
создает жесткая обратная связь. Поэтому процесс устранения начального
отклонения угла тангажа самолета при помощи автопилота с изодромной
обратной связью практически не отличается от аналогичною процесса,
обеспечиваемого автопилотом с жесткой обратной связью
5
6.
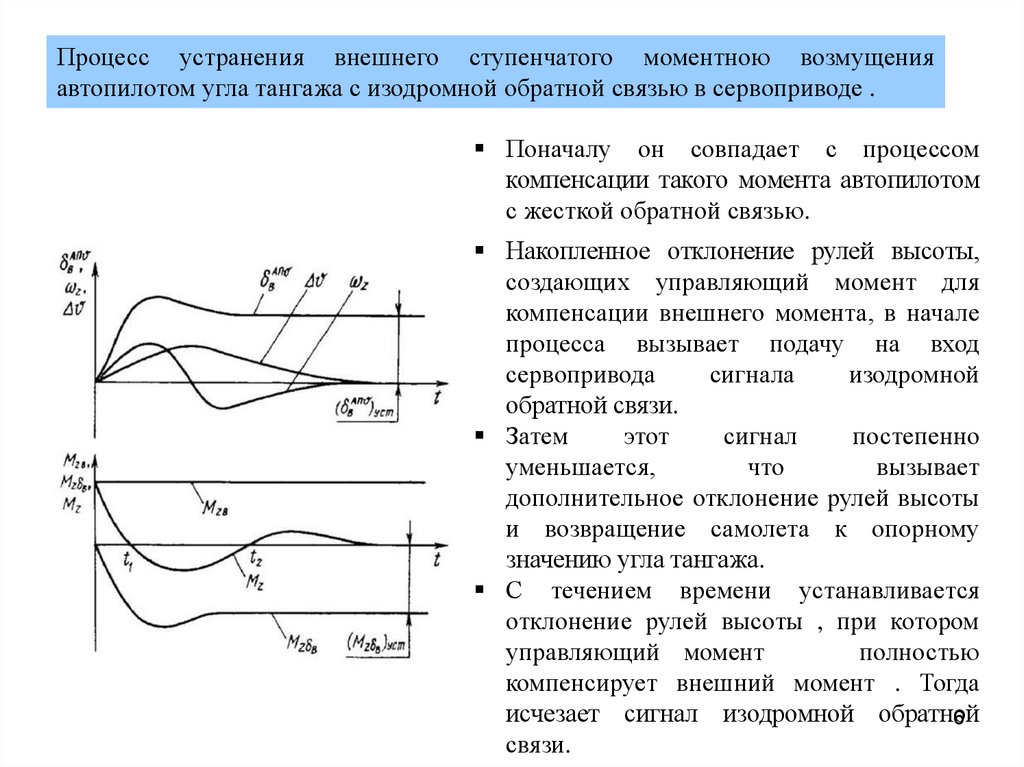
Процесс устранения внешнего ступенчатого моментною возмущенияавтопилотом угла тангажа с изодромной обратной связью в сервоприводе .
Поначалу он совпадает с процессом
компенсации такого момента автопилотом
с жесткой обратной связью.
Накопленное отклонение рулей высоты,
создающих управляющий момент для
компенсации внешнего момента, в начале
процесса вызывает подачу на вход
сервопривода
сигнала
изодромной
обратной связи.
Затем
этот
сигнал
постепенно
уменьшается,
что
вызывает
дополнительное отклонение рулей высоты
и возвращение самолета к опорному
значению угла тангажа.
С течением времени устанавливается
отклонение рулей высоты , при котором
управляющий момент
полностью
компенсирует внешний момент . Тогда
исчезает сигнал изодромной обратной
6
связи.
7.
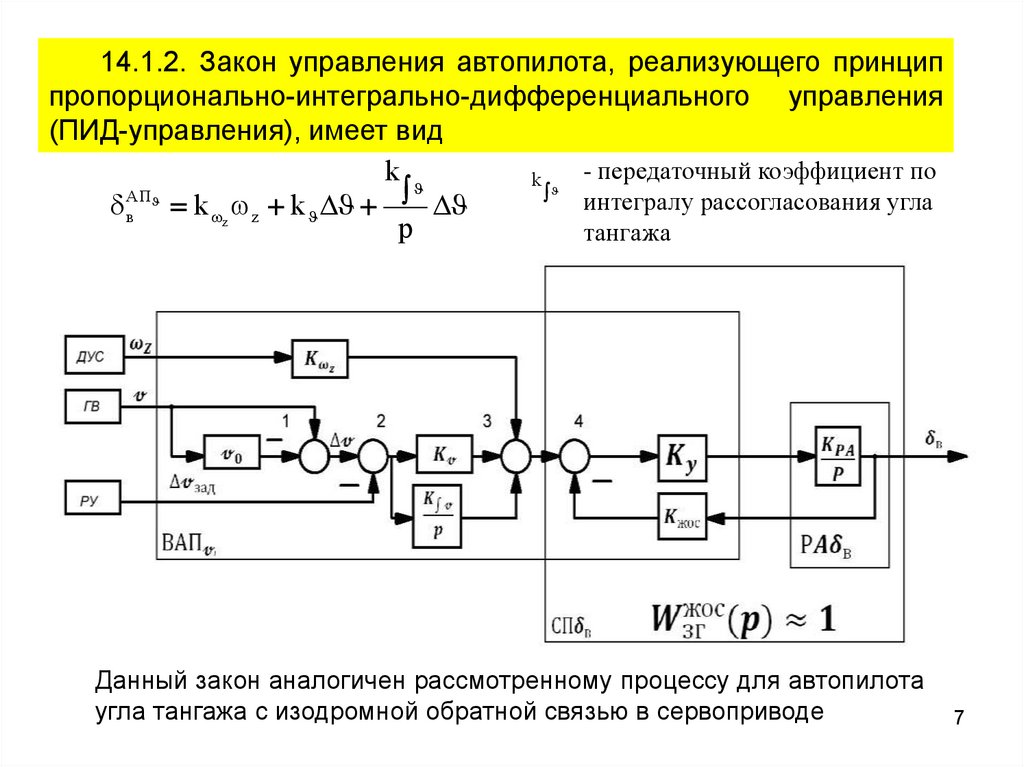
14.1.2. Закон управления автопилота, реализующего принциппропорционально-интегрально-дифференциального управления
(ПИД-управления), имеет вид
- передаточный коэффициент по
k
k
интегралу рассогласования угла
вАП k z z k
p
тангажа
Данный закон аналогичен рассмотренному процессу для автопилота
угла тангажа с изодромной обратной связью в сервоприводе
7
8.
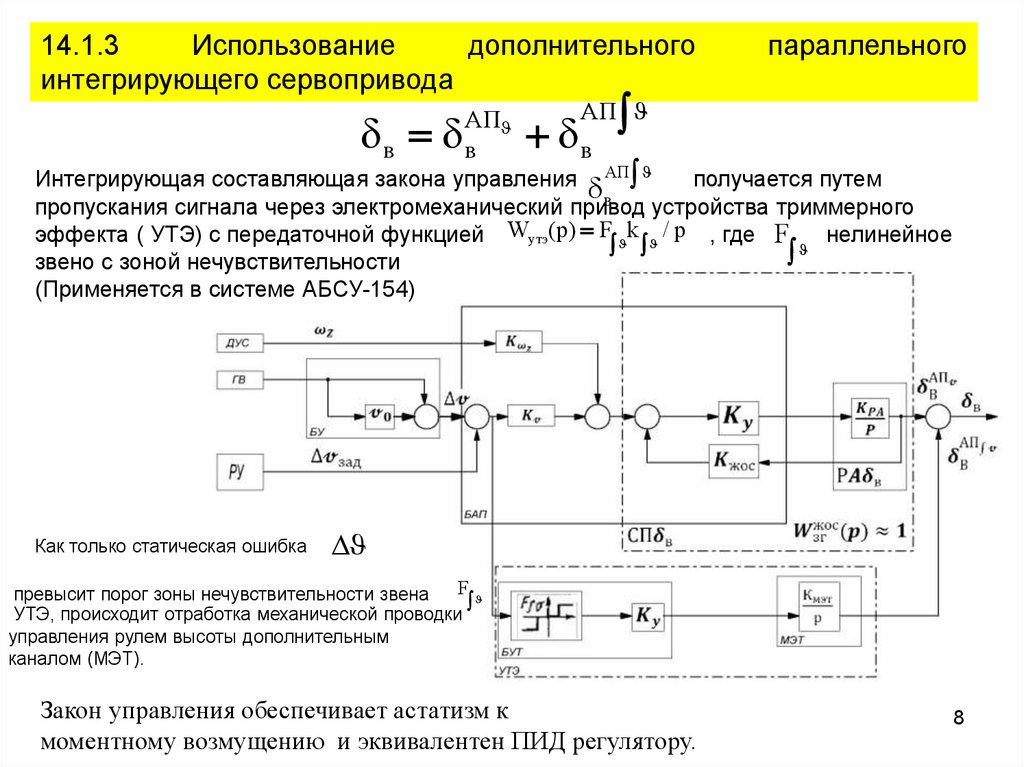
14.1.3Использование
дополнительного
интегрирующего сервопривода
в
АП
в
параллельного
в
АП
Интегрирующая составляющая закона управления АП
получается путем
в
пропускания сигнала через электромеханический привод устройства триммерного
эффекта ( УТЭ) с передаточной функцией Wутэ (р) F k / p , где F
нелинейное
звено с зоной нечувствительности
(Применяется в системе АБСУ-154)
Как только статическая ошибка
F
превысит порог зоны нечувствительности звена
УТЭ, происходит отработка механической проводки
управления рулем высоты дополнительным
каналом (МЭТ).
Закон управления обеспечивает астатизм к
моментному возмущению и эквивалентен ПИД регулятору.
8
9.
14.1.4. Особенности законов управления автопилотов угла тангажа.При управлении продольным траекторным движением самолета контуры
управления углом тангажа и нормальной перегрузкой являются внутренними.
Управление движением центра масс самолета через контур нормальной
перегрузки имеет ряд преимуществ
Автопилот угла тангажа и нормальной перегрузки
(АП n y )
- средство автоматического управления, обеспечивающее управление и
стабилизацию продольного короткопериодического движения самолета на
всех этапах полета путем отклонения рулей высоты при возникновении
рассогласования между значениями текущего приращения и заданного
приращения нормальной перегрузки, причем заданное приращение
нормальной перегрузки получается, как разность между значениями
приращений текущего и заданного значений угла тангажа.
АП n y
в
k z z k n y ( n y n y.зад )
n y.зад k n y ( зад )
n y , n y.зад
соответственно текущее и заданное значение приращений
избыточных нормальных перегрузок
9
10.
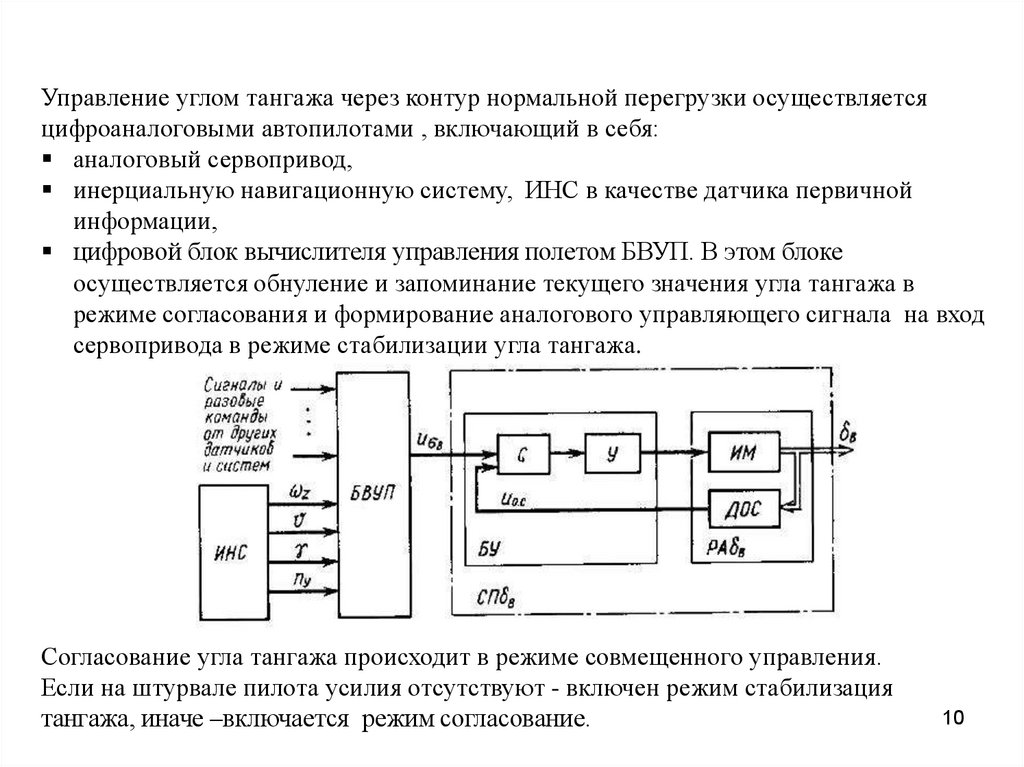
Управление углом тангажа через контур нормальной перегрузки осуществляетсяцифроаналоговыми автопилотами , включающий в себя:
аналоговый сервопривод,
инерциальную навигационную систему, ИНС в качестве датчика первичной
информации,
цифровой блок вычислителя управления полетом БВУП. В этом блоке
осуществляется обнуление и запоминание текущего значения угла тангажа в
режиме согласования и формирование аналогового управляющего сигнала на вход
сервопривода в режиме стабилизации угла тангажа.
Согласование угла тангажа происходит в режиме совмещенного управления.
Если на штурвале пилота усилия отсутствуют - включен режим стабилизация
тангажа, иначе –включается режим согласование.
10
11.
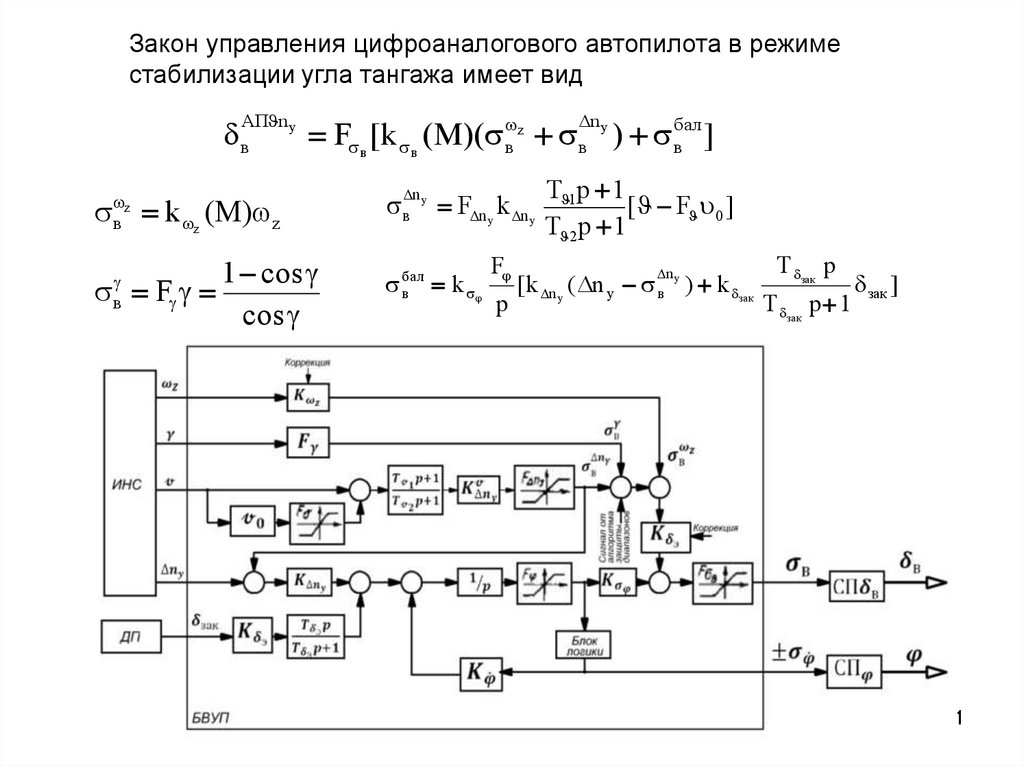
Закон управления цифроаналогового автопилота в режиместабилизации угла тангажа имеет вид
АП n y
в
n
F в [k в (M)( в z в y ) бал
в ]
n
k z (M) z
в y F n y k n y
1 cos
F
cos
бал
k
в
z
в
в
F
p
T 1p 1
[ F 0 ]
T 2 p 1
n
[k n y ( n y в y ) k зак
Т зак р
Т зак р 1
зак ]
11
12.
14.1.5. ВЛИЯНИЕ ОТКАЗОВ НА КАЧЕСТВО СТАБИЛИЗАЦИИ ТАНГАЖА.Пассивные отказы автопилота угла тангажа в контуре сервопривода
приводят к потере автоматической стабилизации и управления углом
тангажа. Вал рулевой машины или шток рулевого агрегата остаются
неподвижными при любых отклонениях текущего угла тангажа от заданного.
Пассивный отказ по сигналу угловой скорости тангажа приводит к
уменьшению
эффективности
демпфирования
продольных
короткопериодических колебаний при стабилизации угла тангажа, что
может вызвать раскачку самолета по углу тангажа.
Активные отказы автопилота угла тангажа в контуре сервопривода
или по сигналам угловой скорости и угла тангажа приводят к перекладке
рулей высоты вследствие отработки вала рулевой машины или штока
рулевого агрегата на максимальный ход. Это может вывести самолет на
недопустимо большие нормальные перегрузки.
Влияние погрешностей измерителей угла тангажа и угловой
скорости тангажа проявляется в статических ошибках по углу тангажа.
Разрегулировки передаточных коэффициентов закона управления
приводят к снижению качества стабилизации и управления углом тангажа.
12