


 Промышленность
ПромышленностьПохожие презентации:










Лекции 15. Автоматическая стабилизация и управление углом крена 15.1. Принцип действия автопилота угла крена
1.
Лекции 15. Автоматическая стабилизация иуправление углом крена
15.1. Принцип действия автопилота угла крена.
Самолет как объект управления статичен в быстром
боковом короткопериодическом движении при действии
внешнего момента крена или бокового ветра. Ручное
управление углом крена пилот осуществляет, воздействуя на
колонку штурвала и наблюдая при этом за изменением угла
крена по указателю авиагоризонта. Удерживая элероны в
отклоненном положении, пилот стабилизирует крен или
изменяет его соответствующим образом. Для освобождения
пилота от этой задачи служит автопилот угла крена.
1
2.
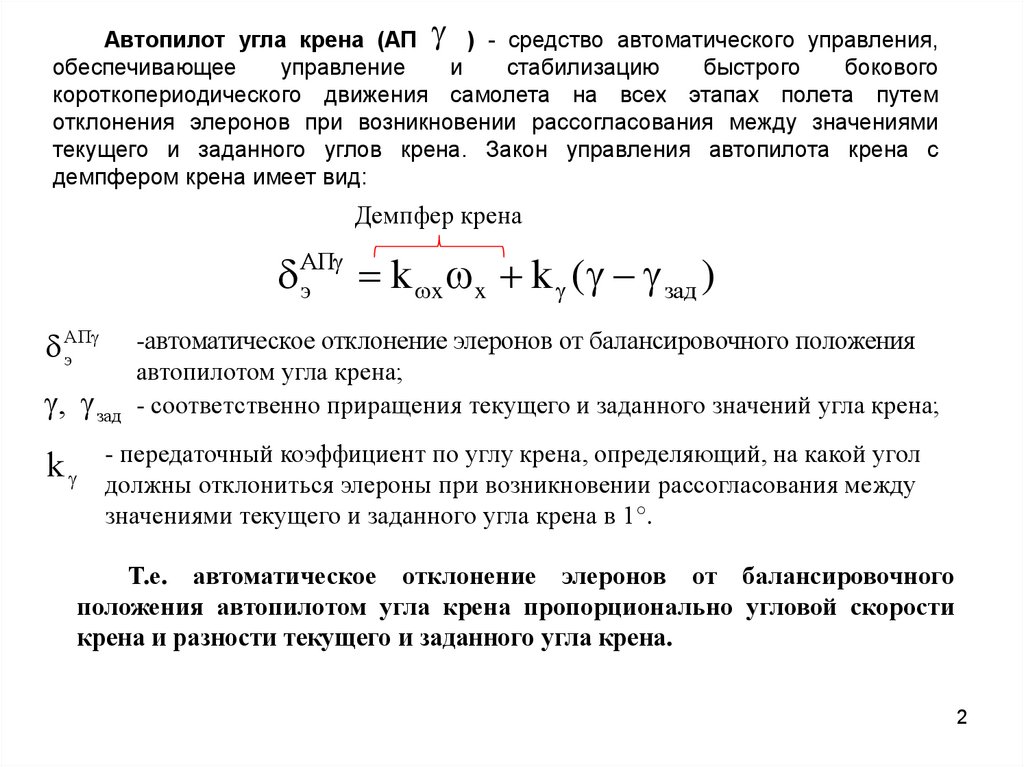
Автопилот угла крена (АП ) - средство автоматического управления,обеспечивающее
управление
и
стабилизацию
быстрого
бокового
короткопериодического движения самолета на всех этапах полета путем
отклонения элеронов при возникновении рассогласования между значениями
текущего и заданного углов крена. Закон управления автопилота крена с
демпфером крена имеет вид:
Демпфер крена
АП
k x x k ( зад )
э
АП
э
-автоматическое отклонение элеронов от балансировочного положения
автопилотом угла крена;
, зад - соответственно приращения текущего и заданного значений угла крена;
k
- передаточный коэффициент по углу крена, определяющий, на какой угол
должны отклониться элероны при возникновении рассогласования между
значениями текущего и заданного угла крена в 1°.
Т.е. автоматическое отклонение элеронов от балансировочного
положения автопилотом угла крена пропорционально угловой скорости
крена и разности текущего и заданного угла крена.
2
3.
Исполнительные устройства сервоприводов автопилотов угла крена включаютсяпо параллельной схеме в механическую проводку управления элеронами в прямых
обратимых системах управления и по последовательной или параллельной схеме в
бустерных и электродистанционных системах управления. При воздействии пилота на
штурвал автопилот выключается и освобождает механическую проводку управления
элеронами.
Автопилоты
угла
крена
бывают
электромеханическими
и
электрогидравлическими.
Принципиальных отличий в работе автопилотов нет.
Электрогидравлические автопилоты имеют исполнительные механизмы с
лучшими динамическими характеристиками, по сравнению с электромеханическими,
но требуют для работы давление гидрожидкости.
Рассмотрим работу автопилота крена на примере электромеханического
автопилота.
3
4.
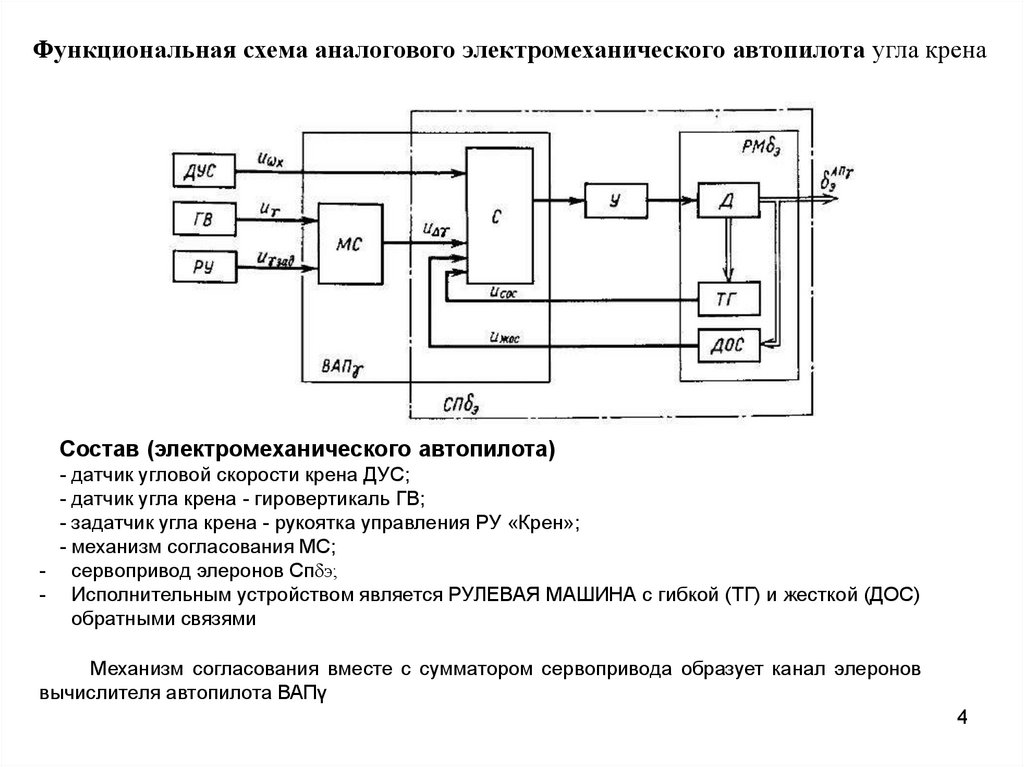
Функциональная схема аналогового электромеханического автопилота угла кренаСостав (электромеханического автопилота)
- датчик угловой скорости крена ДУС;
- датчик угла крена - гировертикаль ГВ;
- задатчик угла крена - рукоятка управления РУ «Крен»;
- механизм согласования МС;
- сервопривод элеронов Спδэ;
- Исполнительным устройством является РУЛЕВАЯ МАШИНА с гибкой (ТГ) и жесткой (ДОС)
обратными связями
Механизм согласования вместе с сумматором сервопривода образует канал элеронов
вычислителя автопилота ВАПγ
4
5.
Функциональная схема аналогового электрогидравлического автопилотаугла крена
Состав (электрогидравлического автопилота)
- датчик угловой скорости крена ДУС;
- датчик угла крена - гировертикаль ГВ;
- задатчик угла крена - рукоятка управления РУ «Крен»;
- механизм согласования МС;
- сервопривод элеронов Спδэ;
- Исполнительным устройством является РУЛЕВОЙ АГРЕГАТ с обратной связью жесткой
(ДОС)
Механизм согласования вместе с сумматором сервопривода образует канал элеронов
вычислителя автопилота ВАПγ
5
6.
Режим «Согласование».Включение автопилота производится в тот момент, когда самолет
сбалансирован по моментам крена и элероны находятся в балансировочном и
близком к нейтральному положению, поэтому обнуления сигнала обратной связи
рулевой машины не требуется. В механизме согласования обнуляется сигнал
текущего крена, поступающего с гировертикали таким образом, что к моменту
включения режима стабилизации угла крена сигнал на входе сервопривода равен
нулю и автопилот готов к безударному включению для управления элеронами.
Режим «Стабилизация угла крена» .
Рулевая машина включается в управление элеронами. Размыкается
электромеханическая следящая система согласования и на вход сервопривода
поступает сигнал, пропорциональный отклонению самолета от крена, который
был у самолета в момент включения режима ( 0 ) . Если значение 0
меньше 5-6°, то автопилот приводит самолет к горизонтальному полету и начинает
стабилизировать угол курса , в противном случае стабилизируется угол крена.
k z z k . Сервопривод отрабатывает
Закон управления принимает вид : АП
э
элероны до тех пор, пока сигнал обратной связи с датчика обратной связи рулевой
машины ДОС не уравновесит управляющий сигнал. Отклонение элеронов вызовет
появление управляющего аэродинамического момента , противоположного по
знаку возмущению, рассогласование по крену будет уменьшаться. Самолет
вернется к заданному крену и элероны придут в балансировочное положение. 6
7.
Режим «Управление»Управление углом крена от рукоятки «Крен» осуществляется, как правило,
«по положению». Рассогласование между заданным и текущим креном
( зад ) отрабатывается автопилотом также, как в режиме стабилизации.
7
8.
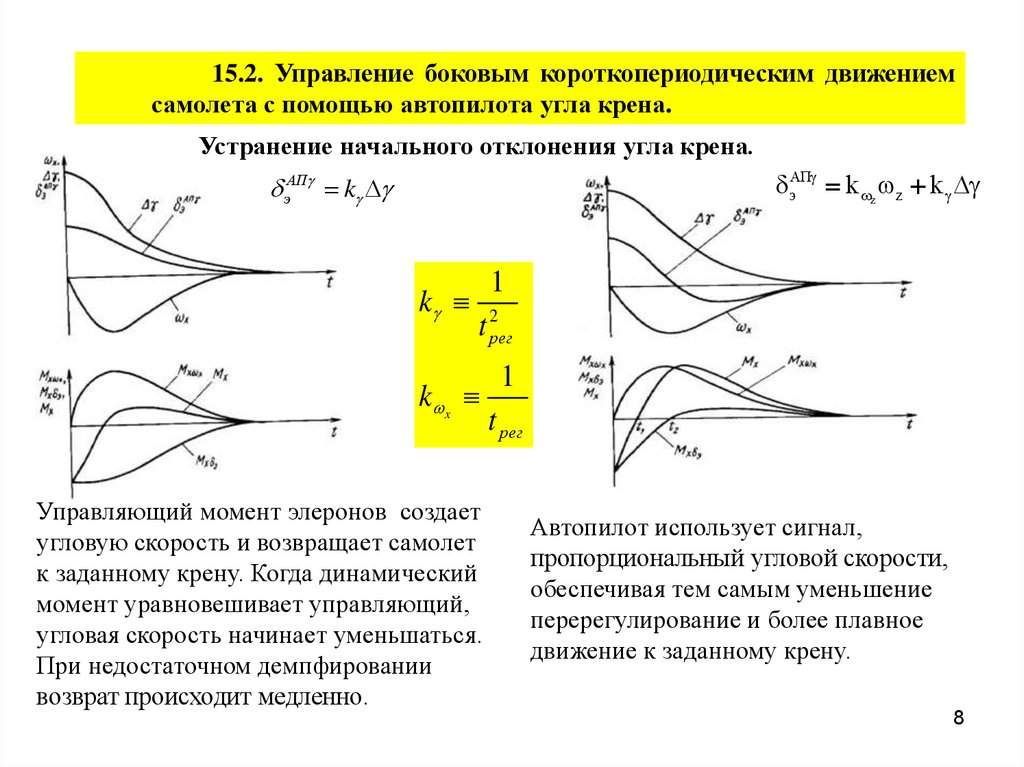
15.2. Управление боковым короткопериодическим движениемсамолета с помощью автопилота угла крена.
Устранение начального отклонения угла крена.
АП
k z z k
э
эАП k
1
k 2
t рег
k x
Управляющий момент элеронов создает
угловую скорость и возвращает самолет
к заданному крену. Когда динамический
момент уравновешивает управляющий,
угловая скорость начинает уменьшаться.
При недостаточном демпфировании
возврат происходит медленно.
1
t рег
Автопилот использует сигнал,
пропорциональный угловой скорости,
обеспечивая тем самым уменьшение
перерегулирование и более плавное
движение к заданному крену.
8
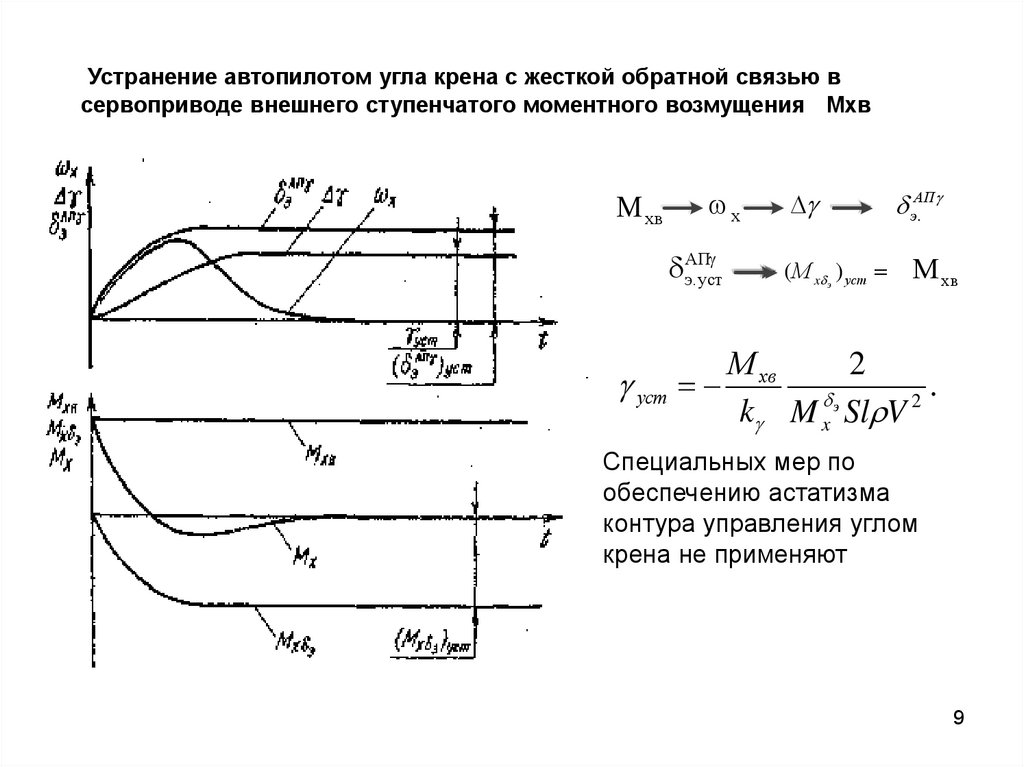
9.
Устранение автопилотом угла крена с жесткой обратной связью всервоприводе внешнего ступенчатого моментного возмущения Мхв
М xв
x
АП
э. уст
( М x э ) уст
эАП
.
М xв
М xв
2
уст
.
э
2
k M x Sl V
Специальных мер по
обеспечению астатизма
контура управления углом
крена не применяют
9
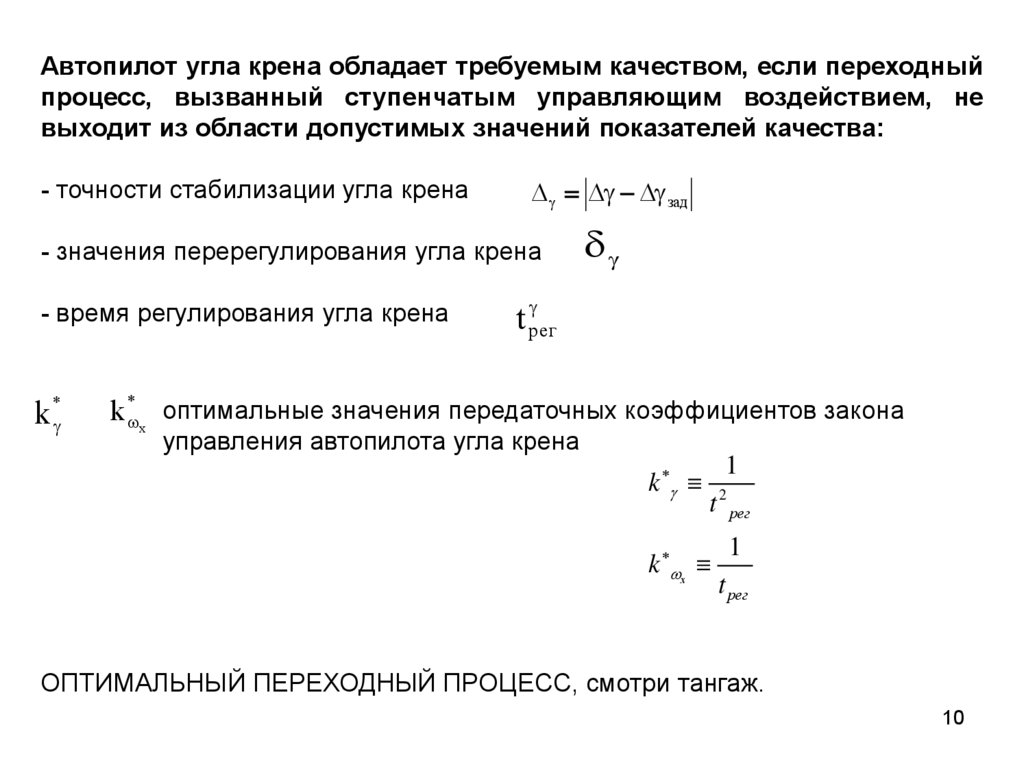
10.
Автопилот угла крена обладает требуемым качеством, если переходныйпроцесс, вызванный ступенчатым управляющим воздействием, не
выходит из области допустимых значений показателей качества:
- точности стабилизации угла крена
зад
- значения перерегулирования угла крена
- время регулирования угла крена
k *
t рег
k * x оптимальные значения передаточных коэффициентов закона
управления автопилота угла крена
1
k 2
t рег
k х
1
t рег
ОПТИМАЛЬНЫЙ ПЕРЕХОДНЫЙ ПРОЦЕСС, смотри тангаж.
10
11.
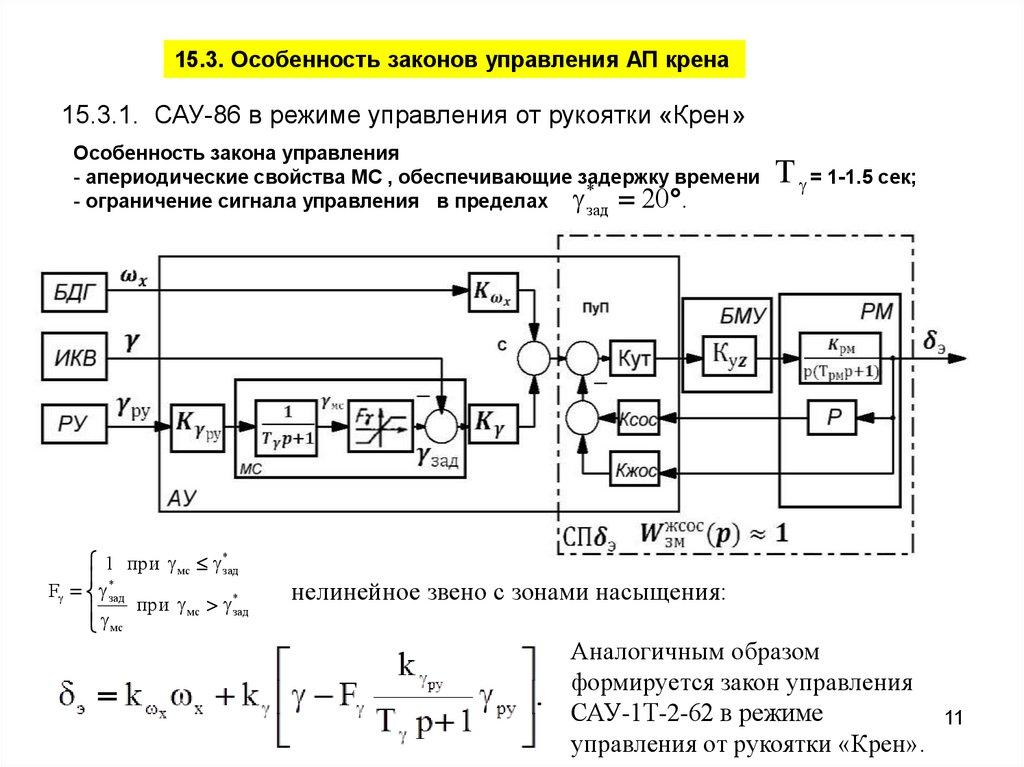
15.3. Особенность законов управления АП крена15.3.1. САУ-86 в режиме управления от рукоятки «Крен»
Особенность закона управления
- апериодические свойства МС , обеспечивающие задержку времени
*
- ограничение сигнала управления в пределах зад 20 .
1 при мс *зад
F *зад
*
при мс зад
мс
Т = 1-1.5 сек;
нелинейное звено с зонами насыщения:
Аналогичным образом
формируется закон управления
САУ-1Т-2-62 в режиме
управления от рукоятки «Крен».
11
12.
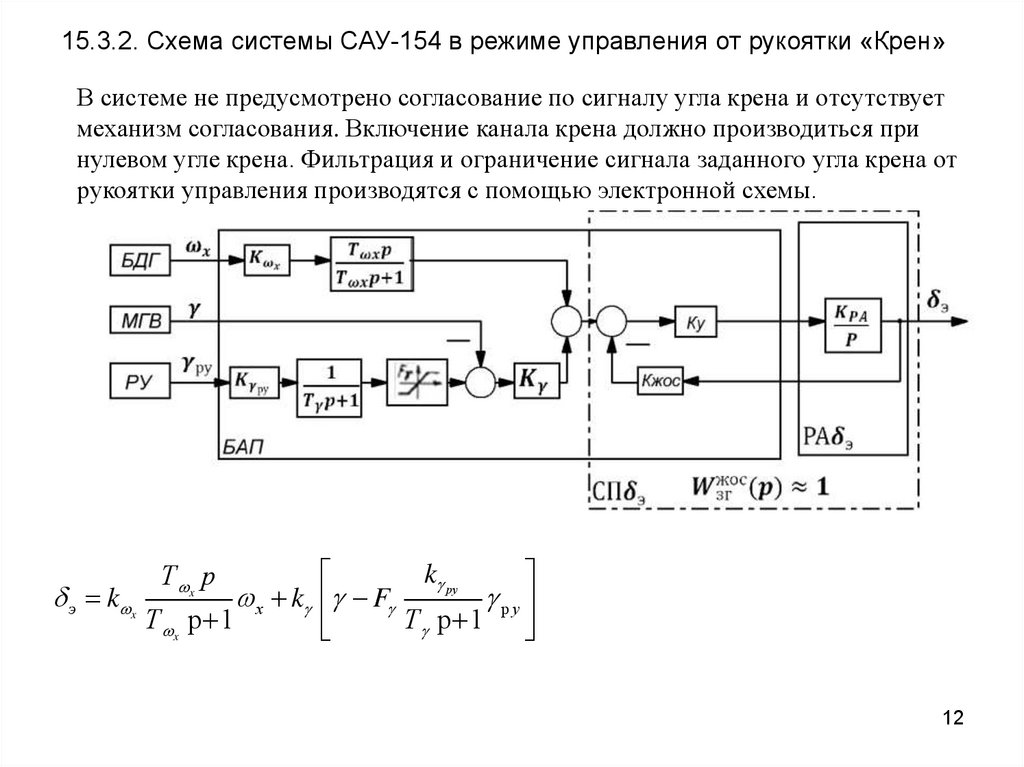
15.3.2. Схема системы САУ-154 в режиме управления от рукоятки «Крен»В системе не предусмотрено согласование по сигналу угла крена и отсутствует
механизм согласования. Включение канала крена должно производиться при
нулевом угле крена. Фильтрация и ограничение сигнала заданного угла крена от
рукоятки управления производятся с помощью электронной схемы.
k ру
э k x
x k F
ру
Т x р 1
Т р 1
Т x p
12
13.
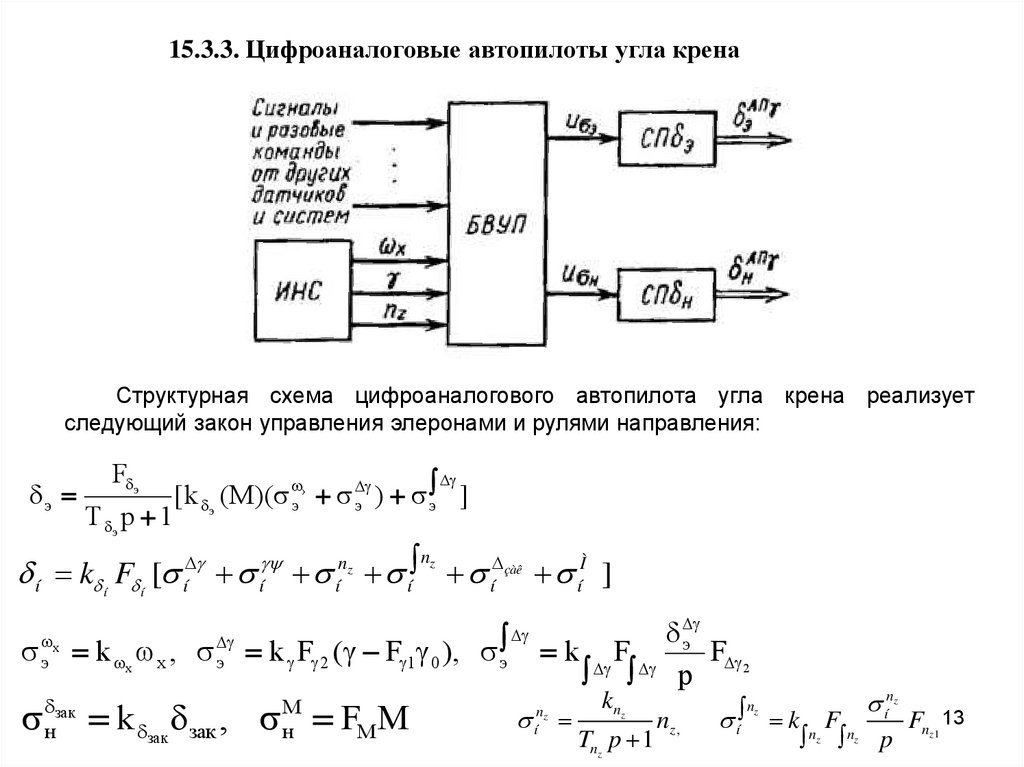
15.3.3. Цифроаналоговые автопилоты угла кренаСтруктурная схема цифроаналогового автопилота угла крена реализует
следующий закон управления элеронами и рулями направления:
э
F э
Т э p 1
[k э (М)( э › э ) э ]
í k F [
í
x
э
í
í
k x x ,
зак
н
í
э
nz
í
nz
çàê Ì ]
í
í
í
k F ( F ), k
2
1 0
k зак зак , FМ М
М
н
э
nz
í
э
F
F
р 2
knz
Tnz p 1
nz ,
ín
í k n F n
F 13
z z p nz1
nz
z
14.
Структурная схема цифроаналогового автопилота угла крена14
15.
15.4. Влияние отказов и характеристик элементов автопилота угла кренана управление боковым движением.
- Пассивные отказы в контуре сервопривода приводят к потере автоматической
стабилизации и управления углом крена.
- Активные отказы автопилота угла крена приводят к отработке элеронов на
полный ход вала рулевой машины или штока рулевого агрегата.
- Пассивный отказ по сигналу угловой скорости крена приводит к уменьшению
эффективности демпфирования боковых короткопериодических колебаний и
раскачке самолета по рысканию.
- Пассивный отказ по сигналу текущего угла крена приводит к потере
автоматической стабилизации угла крена и автопилот начинает работать как
демпфер крена.
- Отказы в схемах согласования могут привести к грубому включению автопилота
в режим стабилизации угла крена.
- Погрешности измерителей угла крена и угловой скорости крена, а также дрейф
нулей датчиков приводят к появлению статических ошибок в управлении углом
крена.
- Влияние разрегулировок передаточных коэффициентов закона управления
аналоговых автопилотов угла крена аналогично влиянию разрегулировок в
аналоговых автопилотах угла тангажа. Малое значения коэффициентов
обеспечивает недостаточность реакции автопилота на возмущающие
воздействия, большие значения коэффициентов обеспечивают повышенную
15
реакцию автопилота на возмущающие воздействия