







 Электроника
ЭлектроникаПохожие презентации:






. Основные понятия")



Запасы устойчивости управления. Основы создания цифровых систем автоматики
1.
2.
Наименование предмета: Теория автоматического управленияЛекция 12. Запасы устойчивости управления
Исполнитель: профессор кафедры ЭОЭП,
кандидат технических наук, Цыба Ю.А.
Электронный адрес:
y.tsyba@aues.kz
3.
Лекция 12. Запасы устойчивости управленияПлан лекции:
1. Оценка запасов устойчивости по АФЧХ.
2. Запас устойчивости по амплитуде Аm.
3. Запас устойчивости по фазе m.
4. Оценка запасов устойчивости по ЛАЧХ (АФЧХ) со
сложной формой.
4.
Литература1. Гайдук А.Р. Теория и методы аналитического синтеза систем автоматического управления. -
М.: Физматлит, 2012. - 360 с.
2. Власов К.П. Теория автоматического управления. Основные положения. Примеры расчета.
Учебное пособие, - Харьков: Гуман. Центр, 2013. – 544 с.
3. Цыба Ю.А. Теория автоматического управления. Конспект лекций, Алматы: АУЭС, 2018 – 72 с.
Интернет ресурсы:
1. Osnovi_teorii_avtomaticheskogo_upravleniya.pdf
2. http://www.kosstu.kz/static/uploads/library/techik/electr/t-e-7.pdf
3. https://www.tstu.ru/book/elib/pdf/2008/muromcev1-l.pdf
5.
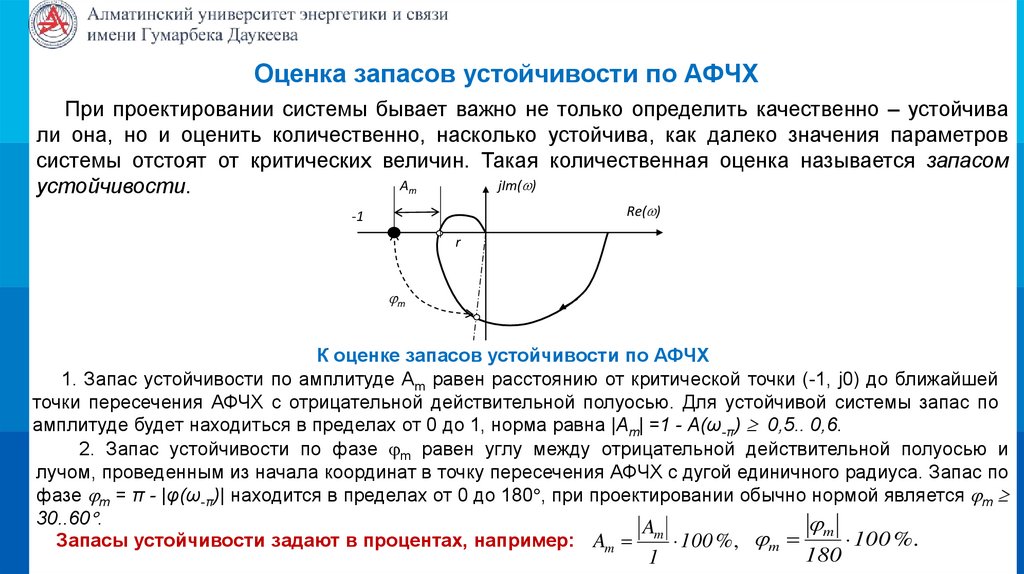
Оценка запасов устойчивости по АФЧХПри проектировании системы бывает важно не только определить качественно – устойчива
ли она, но и оценить количественно, насколько устойчива, как далеко значения параметров
системы отстоят от критических величин. Такая количественная оценка называется запасом
Am
jIm( )
устойчивости.
Re( )
-1
r
m
К оценке запасов устойчивости по АФЧХ
1. Запас устойчивости по амплитуде Am равен расстоянию от критической точки (-1, j0) до ближайшей
точки пересечения АФЧХ с отрицательной действительной полуосью. Для устойчивой системы запас по
амплитуде будет находиться в пределах от 0 до 1, норма равна |Am| =1 - А(ω-π) 0,5.. 0,6.
2. Запас устойчивости по фазе m равен углу между отрицательной действительной полуосью и
лучом, проведенным из начала координат в точку пересечения АФЧХ с дугой единичного радиуса. Запас по
фазе m = π - |φ(ω-π)| находится в пределах от 0 до 180 , при проектировании обычно нормой является m
30..60 .
m
Am
100 %.
Запасы устойчивости задают в процентах, например: Am
100 %, m
1
180
6.
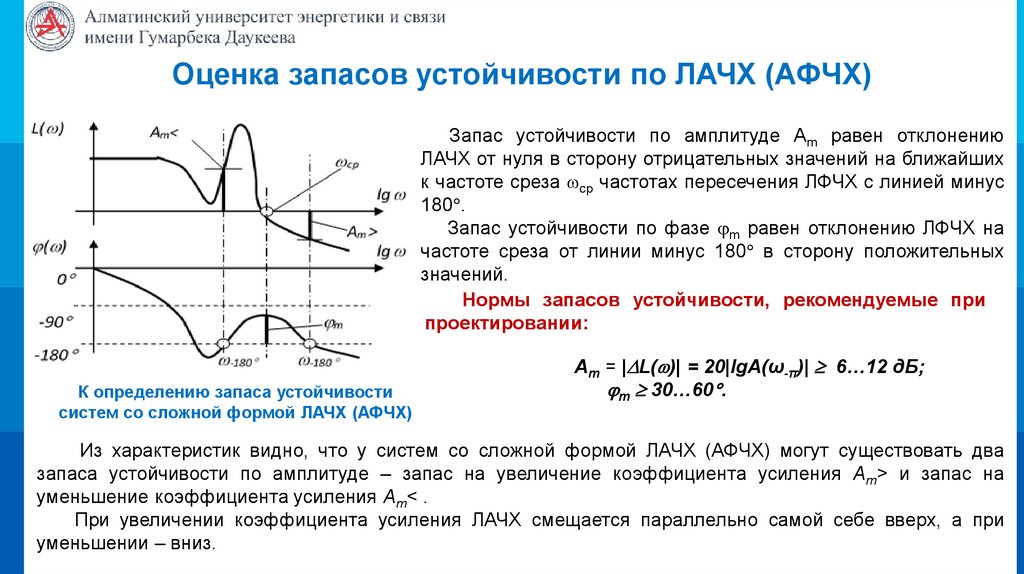
Оценка запасов устойчивости по ЛАЧХ (АФЧХ)Запас устойчивости по амплитуде Am равен отклонению
ЛАЧХ от нуля в сторону отрицательных значений на ближайших
к частоте среза ср частотах пересечения ЛФЧХ с линией минус
180 .
Запас устойчивости по фазе m равен отклонению ЛФЧХ на
частоте среза от линии минус 180 в сторону положительных
значений.
Нормы запасов устойчивости, рекомендуемые при
проектировании:
К определению запаса устойчивости
систем со сложной формой ЛАЧХ (АФЧХ)
Am = | L( )| = 20|lgA(ω-π)| 6…12 дБ;
m 30…60 .
Из характеристик видно, что у систем со сложной формой ЛАЧХ (АФЧХ) могут существовать два
запаса устойчивости по амплитуде – запас на увеличение коэффициента усиления Am> и запас на
уменьшение коэффициента усиления Am< .
При увеличении коэффициента усиления ЛАЧХ смещается параллельно самой себе вверх, а при
уменьшении – вниз.
7.
Лекция 12. Запасы устойчивости управленияКонтрольные вопросы:
1. Как оценить запас устойчивости по АФЧХ?
2. Запас устойчивости по амплитуде Аm?
3. Запас устойчивости по фазе m?
4. Оценка запасов устойчивости по ЛАЧХ (АФЧХ) со сложной формой ?
5. Какие пределы запаса устойчивости должна иметь система чтобы
считается устойчивой?
8.
Наименование предмета: Теория автоматического управленияЛекция – Основы создания цифровых систем автоматики
Исполнитель: профессор кафедры ЭОЭП,
кандидат технических наук, Цыба Ю.А.
Электронный адрес:
y.tsyba@aues.kz
9.
Содержание лекции:1. Принцип преобразования аналогового сигнала в цифровой двоичный код.
2. Виды импульсной модуляции.
3. Дискретизация величин по времени.
4. Квантование величин по уровню.
5. Пример преобразования аналогового сигнала в цифровой двоичный код
6. Принципы построения цифроаналоговых и цифровых систем электропривода.
7. Цифроаналоговая система электропривода.
8. Цифровая система электропривода.
9. Программируемый контроллер в системе электропривода.
10.
Принцип преобразования аналогового сигнала вцифровой двоичный код
Аналоговые системы управления, осуществляющие, например, стабилизацию скорости с
точностью 1- 0,5 % не могут обеспечить точность порядка 0,1 – 0,01%, требующуюся в
некоторых производственных механизмах. Это происходит из-за неспособности аналоговых
задатчиков и датчиков скорости точно измерять значения стабилизируемой координаты и
неспособности аналоговых устройств сравнения (усилителей) точно сравнивать малые сигналы
задания и обратной связи при наличии в них дрейфа нуля. От этих недостатков свободны
цифровые
устройства,
позволяющие
создавать
цифровые
системы
управления,
обеспечивающие регулирование координат с точностью до 0,01% и выше.
Поэтому для преобразования аналоговых систем управления в цифровые необходимо как
преобразовать аналоговый сигнала в цифровой. Для этого необходимо осуществить:
1. Дискретизацию величин по времени.
2. Квантование величин по уровню.
11.
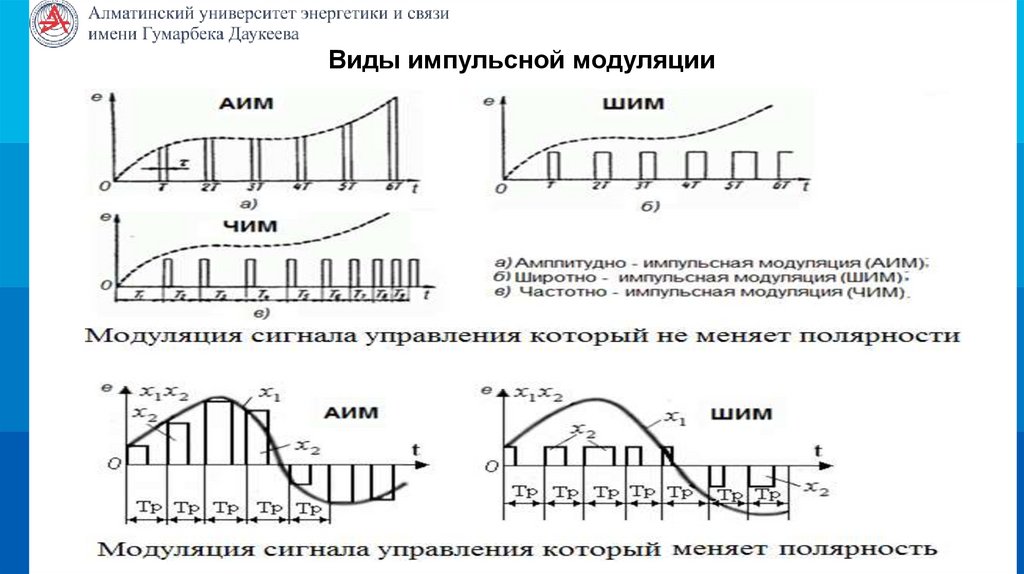
Дискретизация величин по времениДискретизация величин по времени:
а – непрерывная функция;
б –решетчатая функция;
в – условное обозначение импульсного элемента;
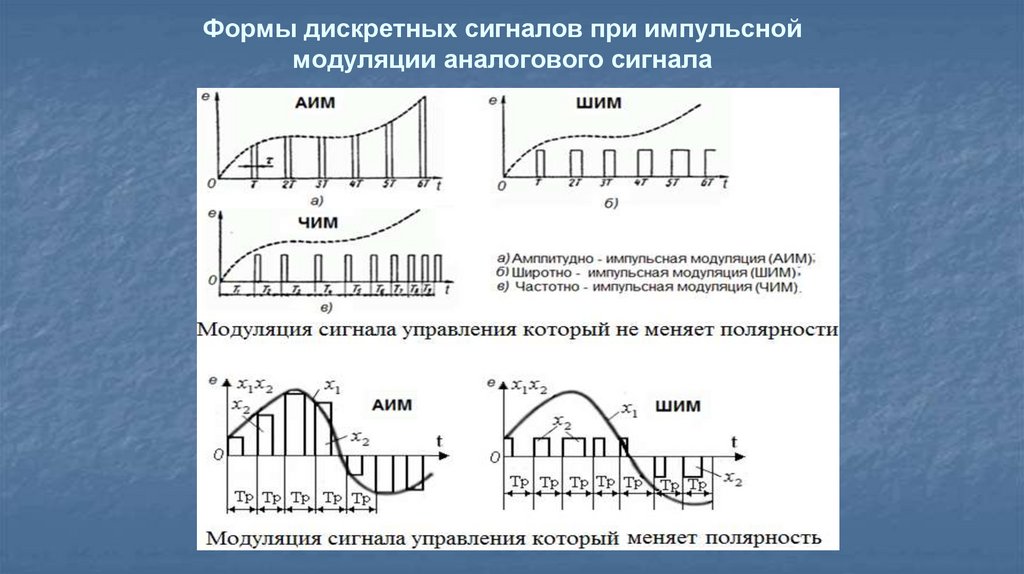
г – амплитудно-импульсная модуляция;
д – широтно-импульсная модуляция;
ж – частотно-импульсная модуляция.
12.
Виды импульсной модуляции13.
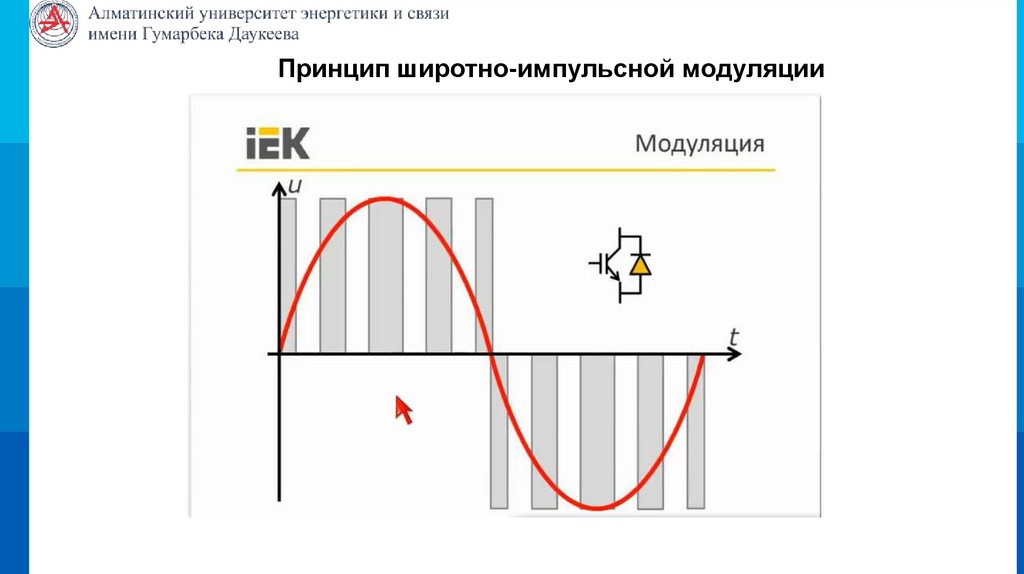
Принцип широтно-импульсной модуляции14.
15.
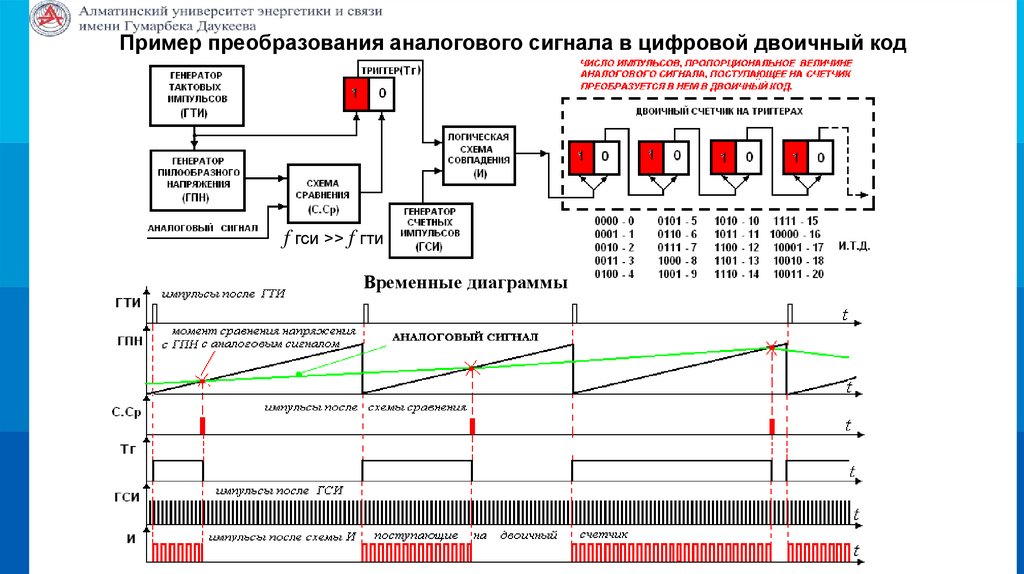
Пример преобразования аналогового сигнала в цифровой двоичный кодf гси >> f гти
Временные диаграммы
16.
Принцип построения цифровой САУСтруктурная схема аналоговой САУ
Структурная схема цифровой САУ
Схема включения цифрового устройства в САУ
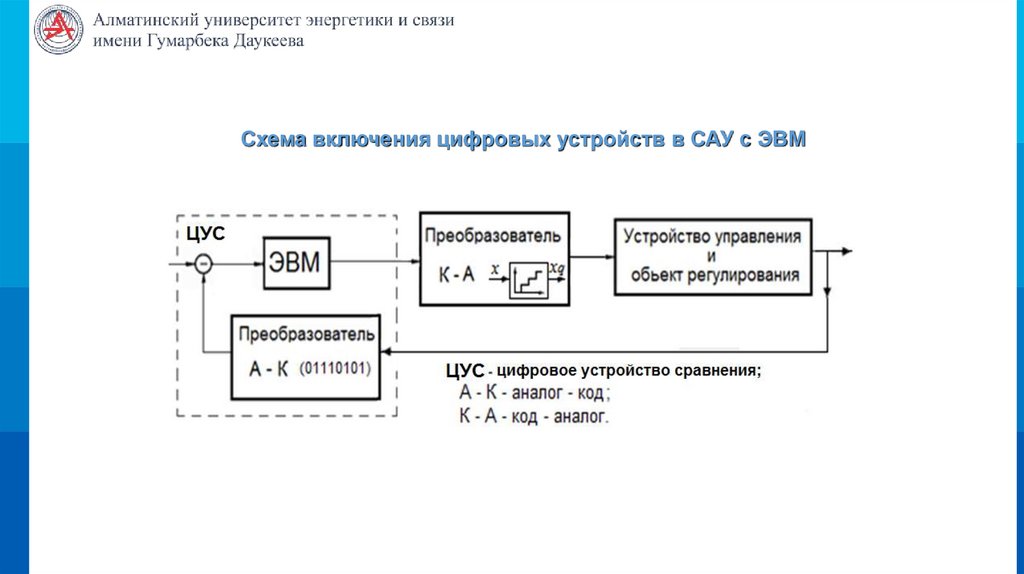
В ЦП включен, модулятор и аналого-цифровой преобразователь, который и преобразует непрерывный сигнал в цифровой с
соответствующей выходной импульсной последовательностью.
17.
Схема включения цифровых устройств в САУ с ЭВМ18.
Некоммерческое акционерное общество«АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ И СВЯЗИ
имени Гумарбека Даукеева»
Кафедра «Энергообеспечение и электропривод»
Лекция №13
Тема: Импульсные (прерывистые) системы регулирования
Лектор: профессор, к.т.н. Цыба
19.
Формы дискретных сигналов при импульсноймодуляции аналогового сигнала
20.
Структурная схема аналоговой системыавтоматического регулирования
21.
Структурная схема импульсной системыавтоматического регулирования
Под импульсными системами автоматического управления понимают такие системы, в
которые включаются устройства, преобразующие непрерывный (аналоговый) сигнал в
дискретный.
Схема включения импульсного устройства в САУ
22.
САУ многоканального регулирования с импульснымрегулятором
23.
ВыводыИмпульсный характер регулирования в объектах управления обладает следующими
существенными конструктивными и эксплуатационными преимуществами:
1. Импульсные САУ гораздо экономичнее непрерывных систем управления поскольку
импульсный регулятор (ИР) только периодически подключает к сигналу управления мощный
исполнительный механизм с объектом управления, а аналоговый регулятор (АР) постоянно
подключен к данной нагрузке включая и датчик.
2. Высокое качество регулирования, в сочетании с конструктивной простотой и надежностью
характерных для релейных (импульсных) устройств, обеспечивается линеаризующим
действием ЧИМ и ШИМ, что улучшает динамические характеристики системы. При этом чем
выше частота квантования во времени тем точнее аппроксимируется сигнал управления.
3. Импульсный характер выходного управляющего сигнала позволяет применить простые и
надежные исполнительные механизмы с импульсным управлением: асинхронные двигатели с
короткозамкнутым ротором, шаговые двигатели, электромагнитные клапаны и т.д..
4. В электроэнергетике большое распространение получили частотно-импульсные регуляторы
(ЧИ-регуляторы) напряжения, частоты и активной мощности.
5. Данные системы могут успешно применяться для управления как медленно протекающих,
так и для быстродействующих процессов в ОУ. Для этого необходимо увеличить частоту
квантования во времени (в соответствии с теоремой Котельникова).
6. Существенным преимуществом регуляторов с АИМ и ШИМ является возможность
осуществлять многоканальное регулирование объектами управления.
7. Импульсный способ передачи сигнала управления по проводным или радиотехническим
каналам связи обладает повышенной помехозащищенностью. Примерами таких систем
являются радиолокационные станции сопровождения, системы телеуправления
промышленными объектами и т.п.
24.
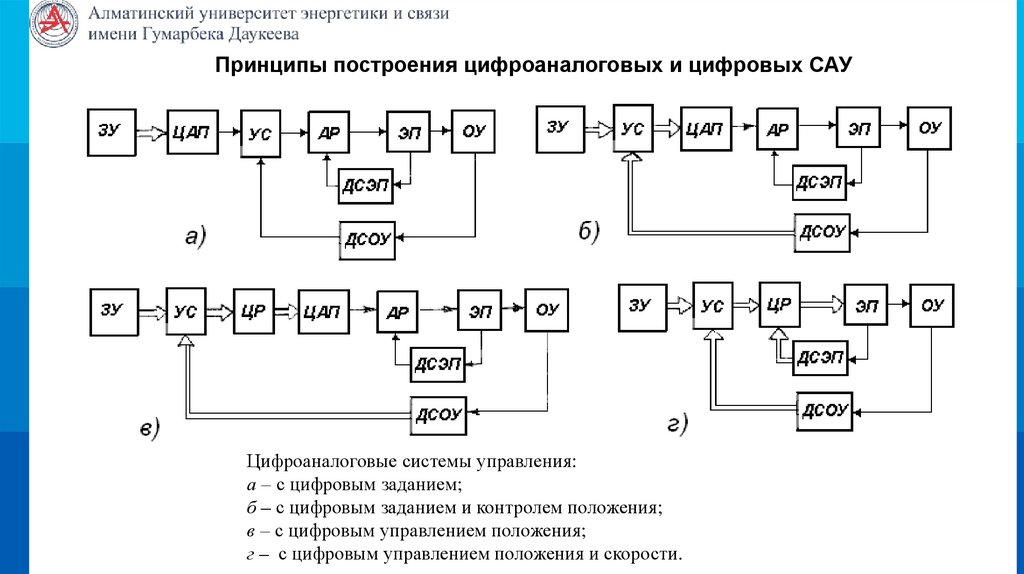
Принципы построения цифроаналоговых и цифровых САУЦифроаналоговые системы управления:
а – с цифровым заданием;
б – с цифровым заданием и контролем положения;
в – с цифровым управлением положения;
г – с цифровым управлением положения и скорости.
25.
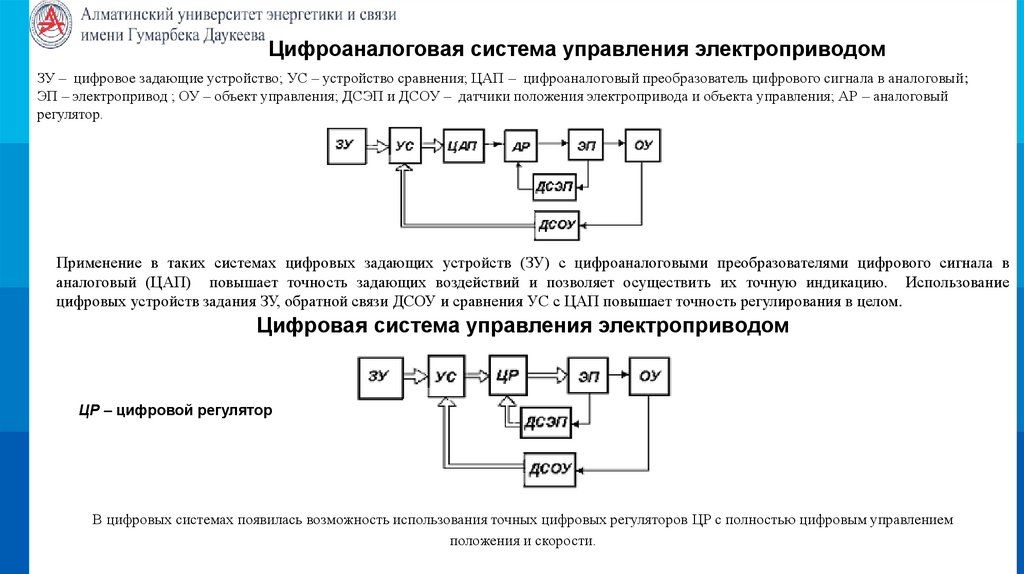
Цифроаналоговая система управления электроприводомЗУ – цифровое задающие устройство; УС – устройство сравнения; ЦАП – цифроаналоговый преобразователь цифрового сигнала в аналоговый;
ЭП – электропривод ; ОУ – объект управления; ДСЭП и ДСОУ – датчики положения электропривода и объекта управления; АР – аналоговый
регулятор.
Применение в таких системах цифровых задающих устройств (ЗУ) с цифроаналоговыми преобразователями цифрового сигнала в
аналоговый (ЦАП) повышает точность задающих воздействий и позволяет осуществить их точную индикацию. Использование
цифровых устройств задания ЗУ, обратной связи ДСОУ и сравнения УС с ЦАП повышает точность регулирования в целом.
Цифровая система управления электроприводом
ЦР – цифровой регулятор
В цифровых системах появилась возможность использования точных цифровых регуляторов ЦР с полностью цифровым управлением
положения и скорости.
26.
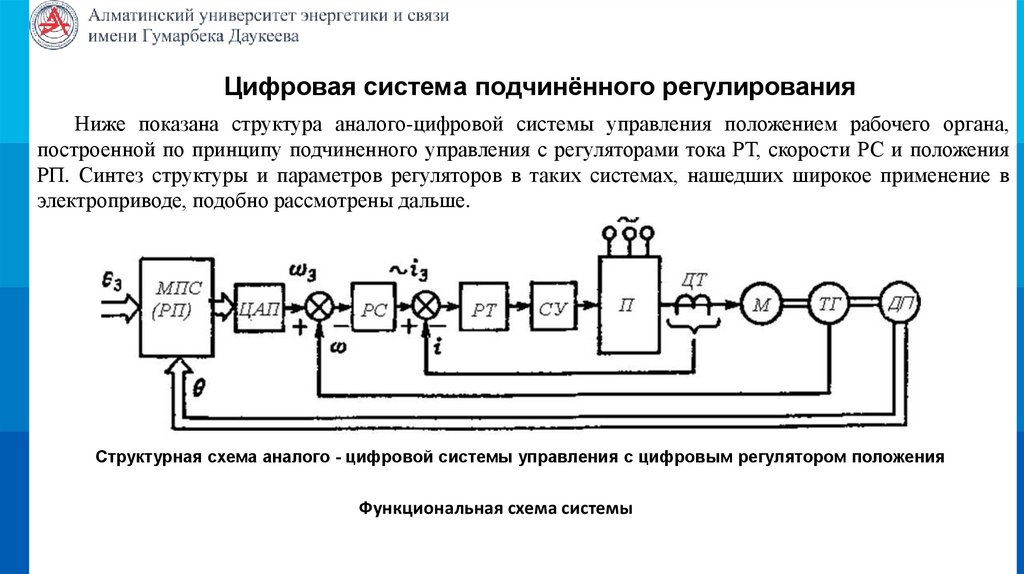
Цифровая система подчинённого регулированияНиже показана структура аналого-цифровой системы управления положением рабочего органа,
построенной по принципу подчиненного управления с регуляторами тока РТ, скорости РС и положения
РП. Синтез структуры и параметров регуляторов в таких системах, нашедших широкое применение в
электроприводе, подобно рассмотрены дальше.
Структурная схема аналого - цифровой системы управления с цифровым регулятором положения
Функциональная схема системы
27.
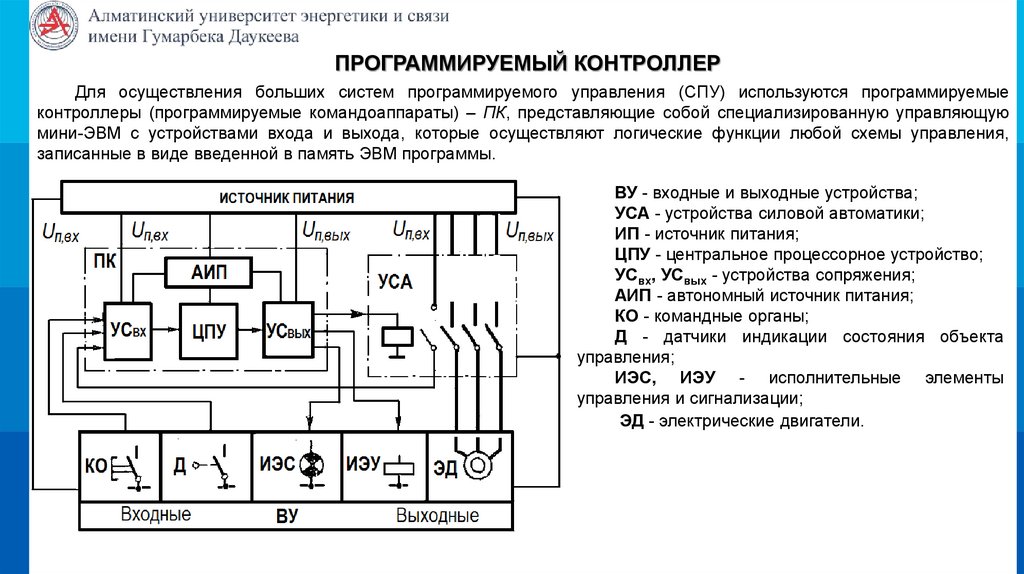
ПРОГРАММИРУЕМЫЙ КОНТРОЛЛЕРДля осуществления больших систем программируемого управления (СПУ) используются программируемые
контроллеры (программируемые командоаппараты) – ПК, представляющие собой специализированную управляющую
мини-ЭВМ с устройствами входа и выхода, которые осуществляют логические функции любой схемы управления,
записанные в виде введенной в память ЭВМ программы.
ВУ - входные и выходные устройства;
УСА - устройства силовой автоматики;
ИП - источник питания;
ЦПУ - центральное процессорное устройство;
УСвх, УСвых - устройства сопряжения;
АИП - автономный источник питания;
КО - командные органы;
Д - датчики индикации состояния объекта
управления;
ИЭС, ИЭУ - исполнительные элементы
управления и сигнализации;
ЭД - электрические двигатели.
28.
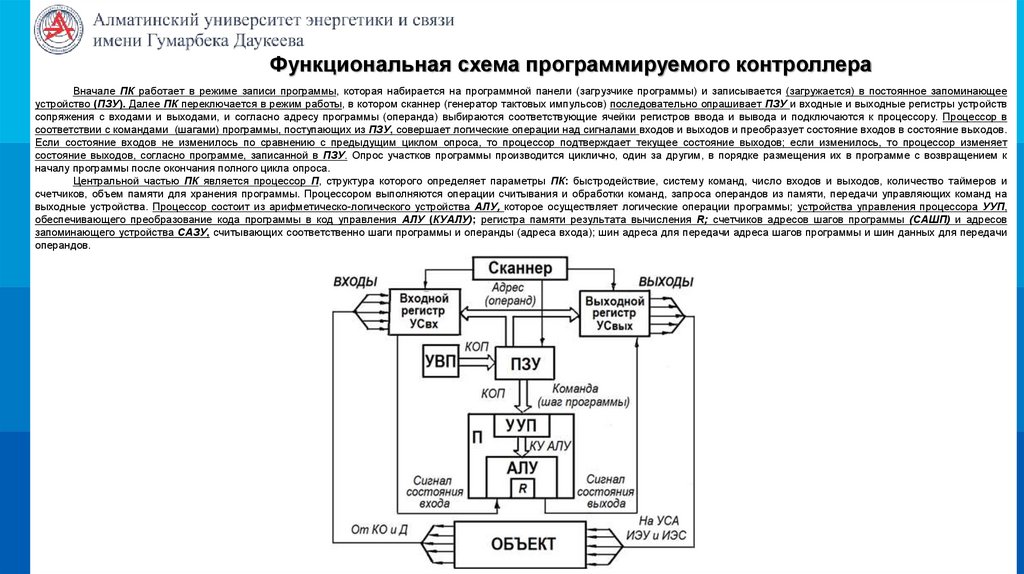
Функциональная схема программируемого контроллераВначале ПК работает в режиме записи программы, которая набирается на программной панели (загрузчике программы) и записывается (загружается) в постоянное запоминающее
устройство (ПЗУ). Далее ПК переключается в режим работы, в котором сканнер (генератор тактовых импульсов) последовательно опрашивает ПЗУ и входные и выходные регистры устройств
сопряжения с входами и выходами, и согласно адресу программы (операнда) выбираются соответствующие ячейки регистров ввода и вывода и подключаются к процессору. Процессор в
соответствии с командами (шагами) программы, поступающих из ПЗУ, совершает логические операции над сигналами входов и выходов и преобразует состояние входов в состояние выходов.
Если состояние входов не изменилось по сравнению с предыдущим циклом опроса, то процессор подтверждает текущее состояние выходов; если изменилось, то процессор изменяет
состояние выходов, согласно программе, записанной в ПЗУ. Опрос участков программы производится циклично, один за другим, в порядке размещения их в программе с возвращением к
началу программы после окончания полного цикла опроса.
Центральной частью ПК является процессор П, структура которого определяет параметры ПК: быстродействие, систему команд, число входов и выходов, количество таймеров и
счетчиков, объем памяти для хранения программы. Процессором выполняются операции считывания и обработки команд, запроса операндов из памяти, передачи управляющих команд на
выходные устройства. Процессор состоит из арифметическо-логического устройства АЛУ, которое осуществляет логические операции программы; устройства управления процессора УУП,
обеспечивающего преобразование кода программы в код управления АЛУ (КУАЛУ); регистра памяти результата вычисления R; счетчиков адресов шагов программы (САШП) и адресов
запоминающего устройства САЗУ, считывающих соответственно шаги программы и операнды (адреса входа); шин адреса для передачи адреса шагов программы и шин данных для передачи
операндов.