

Похожие презентации:



")

")



")
Анализ и сравнение SLAM-алгоритмов для беспилотных летательных аппаратов в помещениях
1.
Анализ и сравнение SLAM-алгоритмов длябеспилотных летательных аппаратов в
помещениях
Худяков Андрей Алексеевич
Группа: 5130901/00101
Руководитель: Лавров Алексей Александрович
2.
Цель работыИсследовать и разработать систему навигации квадрокоптера с камерой RGB-D внутри помещения с
использованием SLAM-алгоритмов и операционной системы ROS.
Для достижения цели необходимо решить следующие задачи:
Провести анализ существующих SLAM-алгоритмов, выделить основанные на использовании RGB-D
камеры, подходящие для использования с БПЛА
Создать модель объекта с RGB-D камерой, разработать алгоритм и программу управления
объектом, осуществить обмен информацией с ROS
Провести предварительные исследования алгоритмов на основе моделирования в среде
робосимулятора и сравнить алгоритмы по выбранным критериям (точность, быстродействие)
Разработать ПО для управления БПЛА с использованием ROS (навигация, прокладка маршрута,
следование по маршруту)
Собрать физическую модель системы навигации БПЛА; провести испытания модели в помещении
3.
Актуальность задачи● Выполняется в рамках работ, проводимых лабораторией ПСПОД
● Рынок БПЛА в логистике - $8.25 млрд в 2021 г., ожидается рост до $53
млрд. к 2028 г., при этом обслуживание складов занимает примерно
две трети рынка
● Заказчикам зачастую требуется реализация навигации БПЛА без
использования радиомаячков
4.
Рассматриваемые алгоритмыАлгоритмы, поддерживающие камеры RGB-D:
RGBDSLAMv2 (2013)
RTAB-Map (2014, в разработке)
ORB-SLAM2 (2016)
ORB-SLAM3 (2020)
MD-SLAM (2022)
Критерии сравнения:
● точность и скорость построения карты
● ресурсоемкость (нагрузка на процессор)
5.
ROS● ROS (Robot Operating System) - набор фреймворков, содержащий
функционал для программирования роботов
● Обеспечивает аппаратную абстракцию, низкоуровневое управление
устройствами, межпроцессорное взаимодействие
● Поддерживает управление пользовательскими пакетами:
○
○
○
○
модели устройств
драйвера устройств
средства для симуляторов (Gazebo, CoppeliaSim, Webots…)
алгоритмы: SLAM, поиск пути
● (ROS 2) Поддержка вычислений и обработки данных в реальном
времени
6.
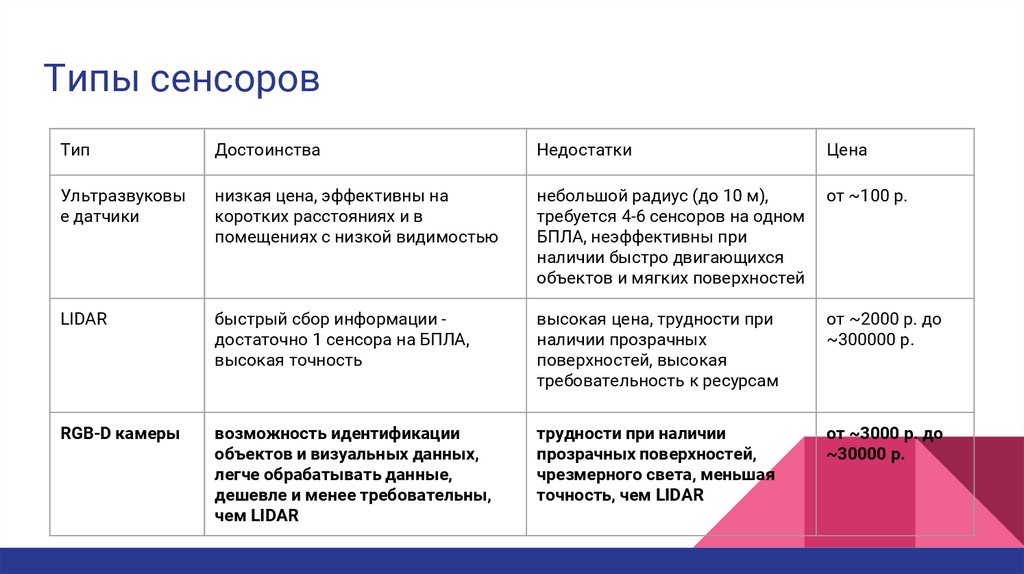
Типы сенсоровТип
Достоинства
Недостатки
Цена
Ультразвуковы
е датчики
низкая цена, эффективны на
коротких расстояниях и в
помещениях с низкой видимостью
небольшой радиус (до 10 м),
требуется 4-6 сенсоров на одном
БПЛА, неэффективны при
наличии быстро двигающихся
объектов и мягких поверхностей
от ~100 р.
LIDAR
быстрый сбор информации достаточно 1 сенсора на БПЛА,
высокая точность
высокая цена, трудности при
наличии прозрачных
поверхностей, высокая
требовательность к ресурсам
от ~2000 р. до
~300000 р.
RGB-D камеры
возможность идентификации
объектов и визуальных данных,
легче обрабатывать данные,
дешевле и менее требовательны,
чем LIDAR
трудности при наличии
прозрачных поверхностей,
чрезмерного света, меньшая
точность, чем LIDAR
от ~3000 р. до
~30000 р.
7.
Intel Realsense D435● Угол обзора глубины - 87° × 58°
● Минимальная дистанция - 28 см
● Разрешение камеры глубины 1280 × 720
● Частота кадров глубины - 90 fps
● Угол обзора RGB-камер - 69° ×
42°
● Разрешение RGB-камер - 1920 ×
1080
● Частота кадров RGB - 30 fps
8.
CoppeliaSim● CoppeliaSim (ранее V-REP) - робосимулятор, разрабатываемый Coppelia
Robotics AG
● Бесплатная учебная версия
● Скрипты управления объектами на Lua/Python
● Плагины для построения путей, обработки изображений, визуализации
данных и др.
● Поддержка управления объектами внешне - библиотеки для работы с
Remote API и ROS
9.
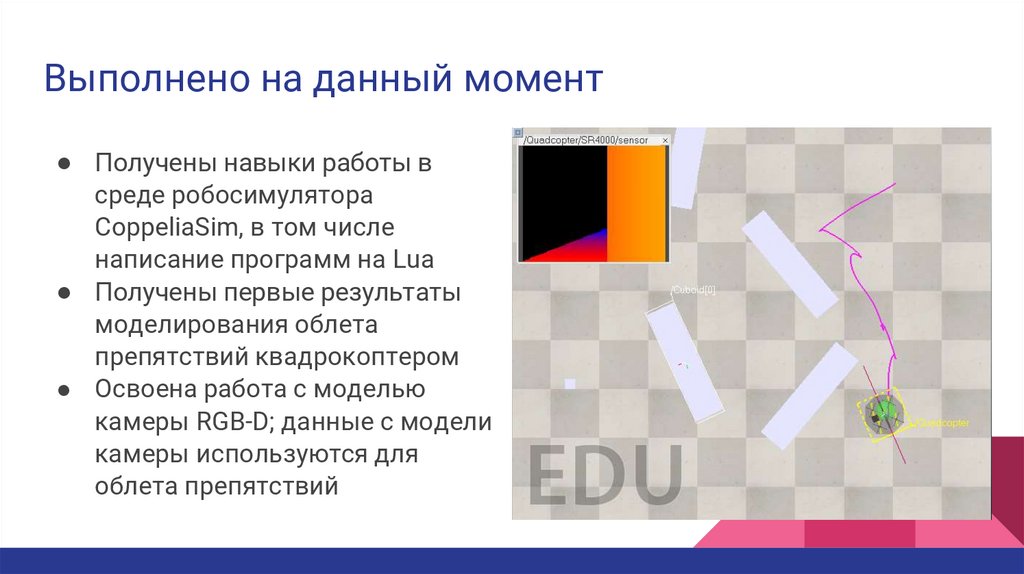
Выполнено на данный момент● Получены навыки работы в
среде робосимулятора
CoppeliaSim, в том числе
написание программ на Lua
● Получены первые результаты
моделирования облета
препятствий квадрокоптером
● Освоена работа с моделью
камеры RGB-D; данные с модели
камеры используются для
облета препятствий