









 Программирование
ПрограммированиеПохожие презентации:


")







Курсовой проект на тему «ORB-SLAM метод одновременной локализации и построения карты»
1.
Министерство науки и высшего образования Российской ФедерацииФедеральное государственное бюджетное образовательное учреждение высшего
образования
«Московский государственный технический университет имени Н.Э. Баумана
(национальный исследовательский университет)» (МГТУ им. Н.Э. Баумана)
Факультет ИУ – «Информатика и системы управления»
Кафедра ИУ1 – «Системы автоматического управления»
Курсовой проект на тему
«ORB-SLAM метод одновременной локализации и
построения карты»
Студент группы ИУ1-111:
Каптилин Д.Е.
Руководитель, к.т.н., доцент:
Фомичев А.В.
2022 г
2.
Задачи курсового проектаЦель :
Исследовать использование метода ORB-SLAM
одновременной локализации и построения карты в
задаче управления роботом
Задачи:
1. Построить модель робота с
заданной программой
управления.
2. Провести моделирование
работы алгоритма ORB-SLAM
для данного робота.
2
3.
Особенности ORB-SLAMОсновные компоненты
ORB-SLAM
3
4.
ПО для моделирования4
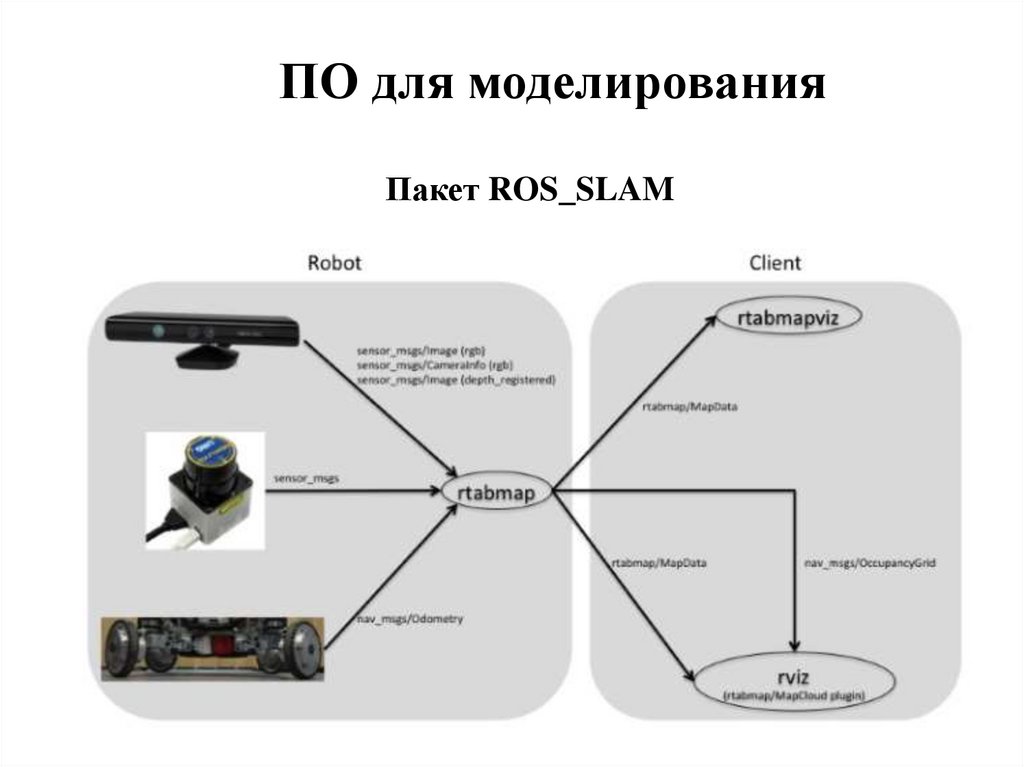
5.
ПО для моделированияПакет ROS_SLAM
5
6.
Моделирование робота с заданнойпрограммой управления
Робот Turtlebot и его модель в Webots
6
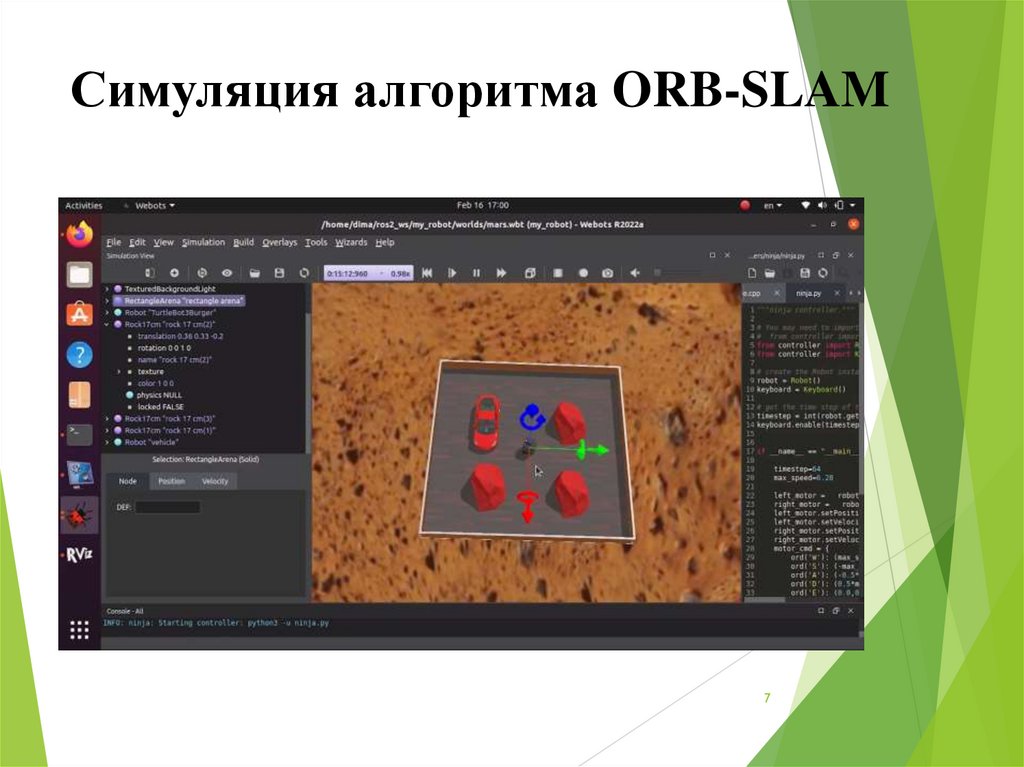
7.
Симуляция алгоритма ORB-SLAM7
8.
Симуляция алгоритма ORBSLAMВид сверху построенной сцены
8
Построенная карта в Rviz
9.
Про некооперируемуюстыковку
орбитальное сервисное
обслуживание
спутников;
обеспечение
транспортных
операций;
обслуживание
орбитальных станций;
борьба с космическим
мусором.
Орбитальный экспресс: ASTRO
и NEXTSat, 2007 г
9
10.
Относительная навигация наорбите
Определение СК в задачах относительной
навигации
10
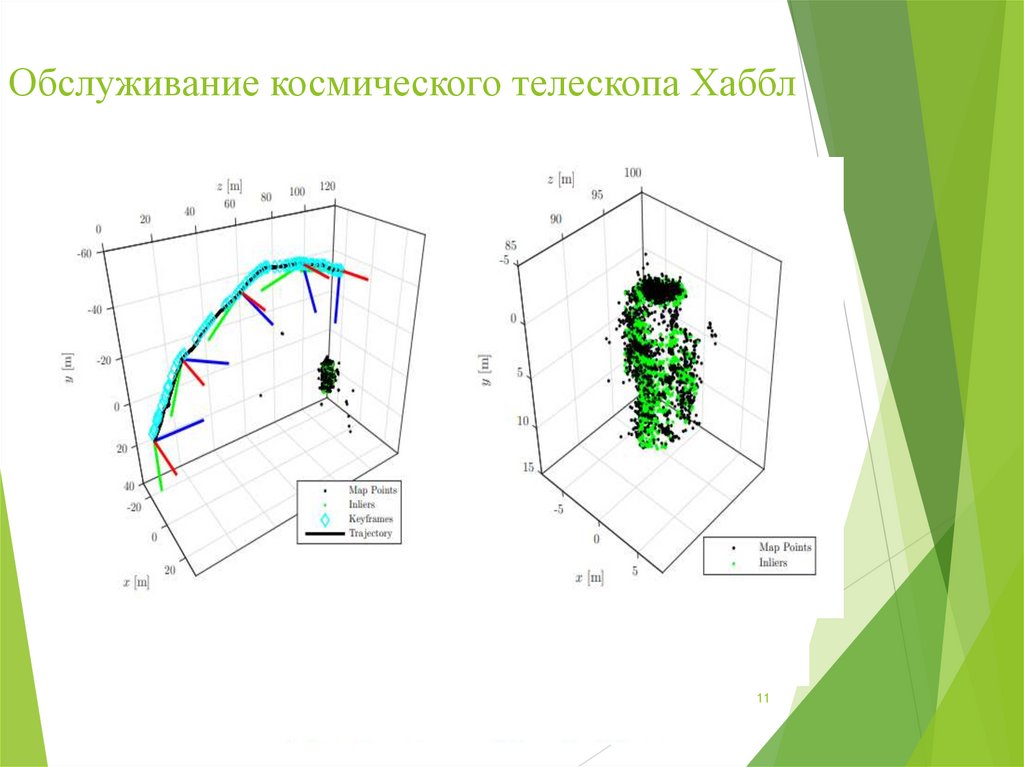
11.
Обслуживание космического телескопа Хаббл11
12.
1213.
1314.
1415.
Заключение• В ходе проделанной курсовой работы был рассмотрен ORB-SLAM
метод одновременной локализации и построения карты местности.
Данный метод использует детектор фич ORB, позволяющий достигать
построения в режиме реального времени.
• В практической части работы были рассмотрены аппараты для
реализации моделирования алгоритма ORB-SLAM. В среде 3Dпроектирования Webots был разработан прототип робота Turtlebot,
являющийся основой для системы навигации. Для него был написан
контроллер, позволяющий управлять его движением с клавиатуры
компьютера. При помощи операционной системы роботов ROS был
реализован алгоритм построения карты и локализации. Были получены
навыки написания узлов в ROS, которые в дальнейшем можно будет
использовать на реальном роботе. Данные, полученные после
моделирования системы в Webots и ROS, в дальнейшем будут взяты за
основу будущего дипломного проекта для получения готовой системы
навигации.
15
16.
Спасибо завнимание!
16