
 Электроника
ЭлектроникаПохожие презентации:









")
Автоматические регуляторы
1.
Лекция 7АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ
2.
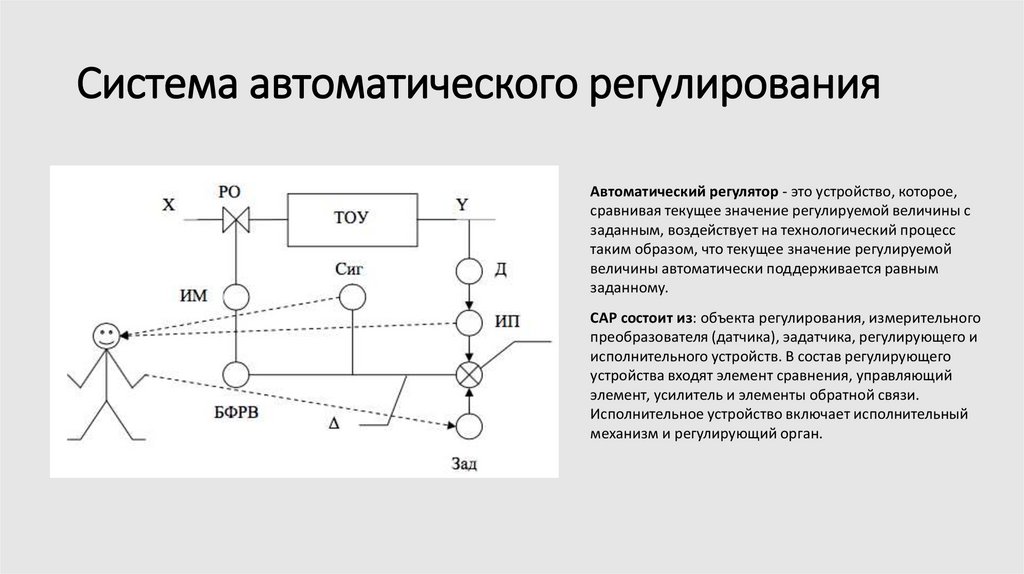
Система автоматического регулированияАвтоматический регулятор - это устройство, которое,
сравнивая текущее значение регулируемой величины с
заданным, воздействует на технологический процесс
таким образом, что текущее значение регулируемой
величины автоматически поддерживается равным
заданному.
САР состоит из: объекта регулирования, измерительного
преобразователя (датчика), эадатчика, регулирующего и
исполнительного устройств. В состав регулирующего
устройства входят элемент сравнения, управляющий
элемент, усилитель и элементы обратной связи.
Исполнительное устройство включает исполнительный
механизм и регулирующий орган.
3.
КЛАССИФИКАЦИЯ РЕГУЛЯТОРОВ ПОЗАКОНУ РЕГУЛИРОВАНИЯ
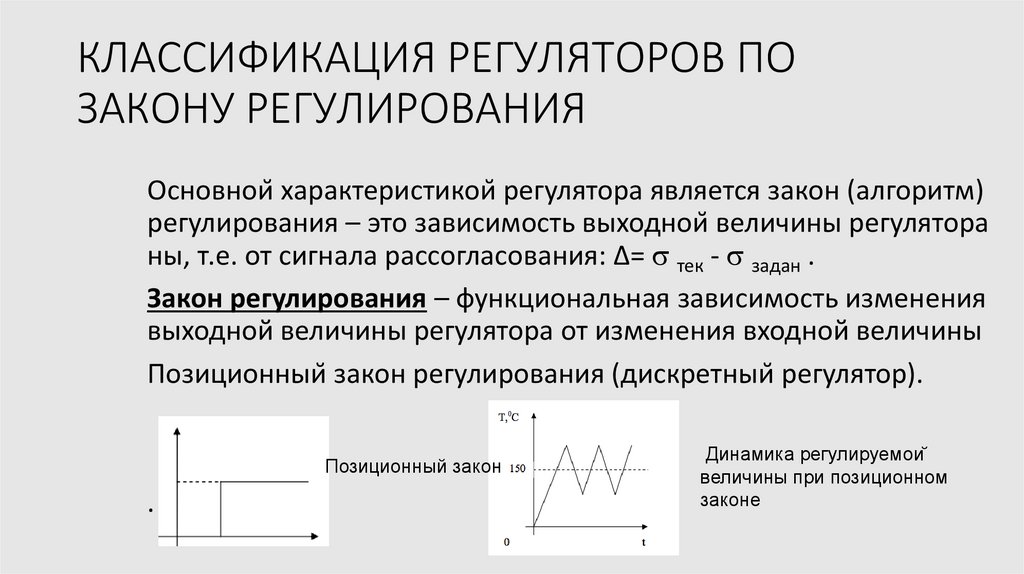
Основной характеристикой регулятора является закон (алгоритм)
регулирования – это зависимость выходной величины регулятора
ны, т.е. от сигнала рассогласования: ∆= тек - задан .
Закон регулирования – функциональная зависимость изменения
выходной величины регулятора от изменения входной величины
Позиционный закон регулирования (дискретный регулятор).
Позиционный закон
.
Динамика регулируемой
величины при позиционном
законе
4.
КЛАССИФИКАЦИЯ РЕГУЛЯТОРОВ ПОЗАКОНУ РЕГУЛИРОВАНИЯ
Непрерывные регуляторы:
– Пропорциональный закон регулирования (П – регулятор);
– Интегральный закон регулирования (И – регулятор);
– Пропорционально-интегральный закон регулирования (ПИ – регулятор);
– Пропорционально-дифференциальный закон регулирования (ПД – регулятор);
– Пропорционально-интегрально-дифференциальный закон регулирования (ПИД –
регулятор)
Коэфициент усиления регулятора К, время интегрирования Ти и время предварения Тп,
входящие в уровнения регуляторов и определяющие их динамические свойства, называется
параметрами настройки регуляторов. Значения этих параметров выбирается из условия,
чтобы САР в целом обеспечивала требуемое качество процесса регулирования.
5.
Пропорциональный закон регулирования(П – регулятор)
σ
-10
0
t
μ
t
Уравнение динамики в графическом виде
Уравнение динамики в формульном виде:
µ=k*λ,
λ-возмущающее воздействие;
к – коэффициент усиления
μ- относительная величина измерения регулирующего
воздействия.
σ=∆вых/∆вых - относительная величина изменения
регулируемогого воздействия.
П-регулятор- регулятор, у которого выходная величина
изменяется пропорционально входной.
Преимущества: хорошо работает на неустановившихся
режимах, простая конструкция.
Недостаток: наличие остаточного отклонения, низкая
точность.
6.
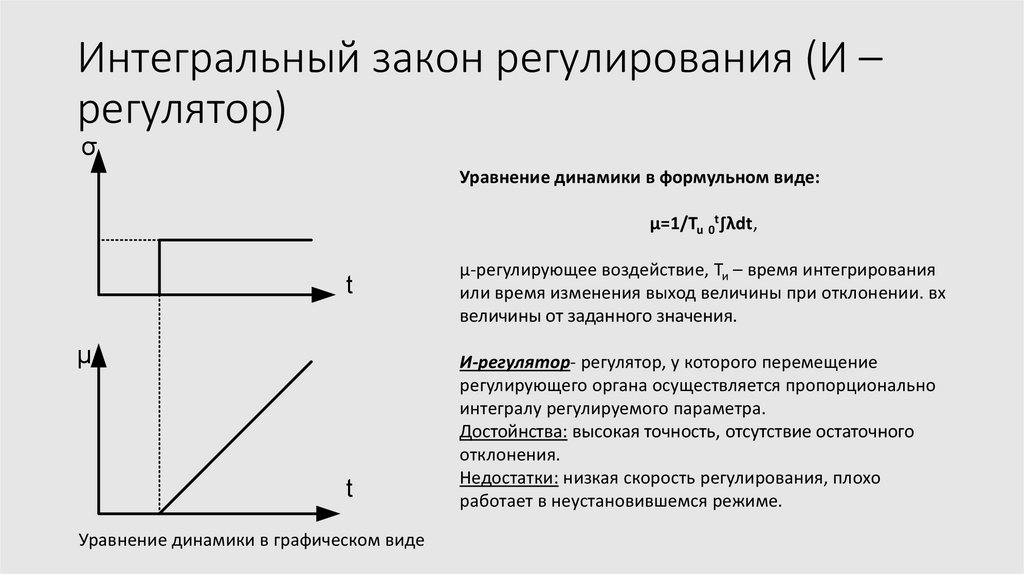
Интегральный закон регулирования (И –регулятор)
σ
Уравнение динамики в формульном виде:
µ=1/Tu 0t∫λdt,
t
μ
t
Уравнение динамики в графическом виде
µ-регулирующее воздействие, Ти – время интегрирования
или время изменения выход величины при отклонении. вх
величины от заданного значения.
И-регулятор- регулятор, у которого перемещение
регулирующего органа осуществляется пропорционально
интегралу регулируемого параметра.
Достойнства: высокая точность, отсутствие остаточного
отклонения.
Недостатки: низкая скорость регулирования, плохо
работает в неустановившемся режиме.
7.
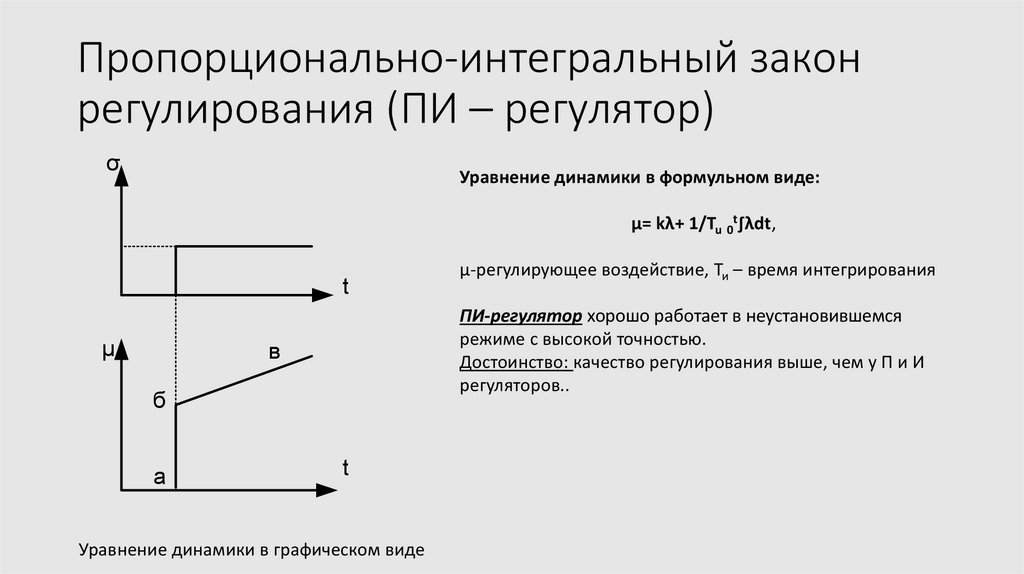
Пропорционально-интегральный законрегулирования (ПИ – регулятор)
σ
Уравнение динамики в формульном виде:
µ= kλ+ 1/Tu 0t∫λdt,
t
μ
ПИ-регулятор хорошо работает в неустановившемся
режиме с высокой точностью.
Достоинство: качество регулирования выше, чем у П и И
регуляторов..
в
б
а
µ-регулирующее воздействие, Ти – время интегрирования
t
Уравнение динамики в графическом виде
8.
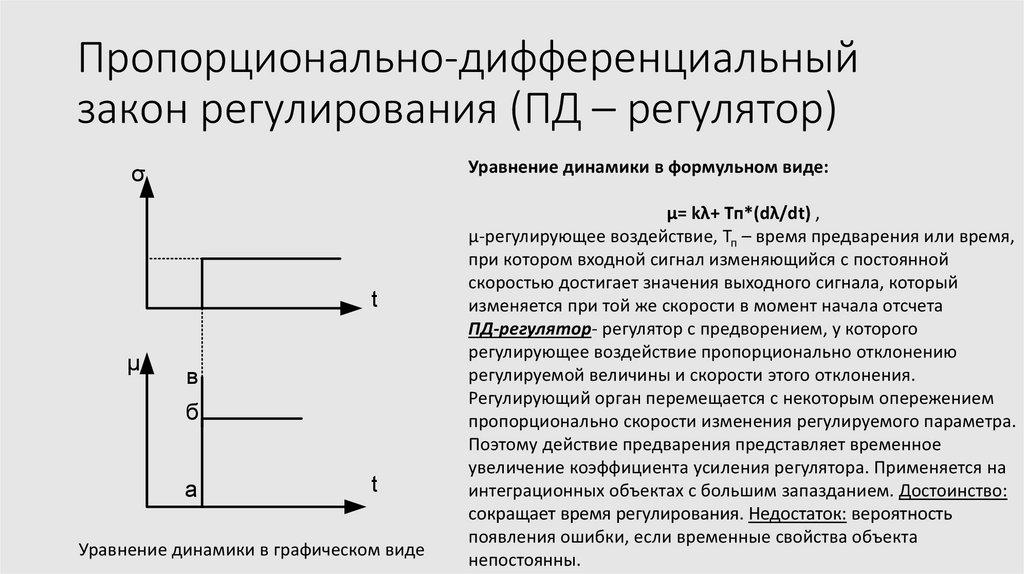
Пропорционально-дифференциальныйзакон регулирования (ПД – регулятор)
Уравнение динамики в формульном виде:
σ
t
μ
в
б
а
t
Уравнение динамики в графическом виде
µ= kλ+ Tп*(dλ/dt) ,
µ-регулирующее воздействие, Тп – время предварения или время,
при котором входной сигнал изменяющийся с постоянной
скоростью достигает значения выходного сигнала, который
изменяется при той же скорости в момент начала отсчета
ПД-регулятор- регулятор с предворением, у которого
регулирующее воздействие пропорционально отклонению
регулируемой величины и скорости этого отклонения.
Регулирующий орган перемещается с некоторым опережением
пропорционально скорости изменения регулируемого параметра.
Поэтому действие предварения представляет временное
увеличение коэффициента усиления регулятора. Применяется на
интеграционных объектах с большим запазданием. Достоинство:
сокращает время регулирования. Недостаток: вероятность
появления ошибки, если временные свойства объекта
непостоянны.
9.
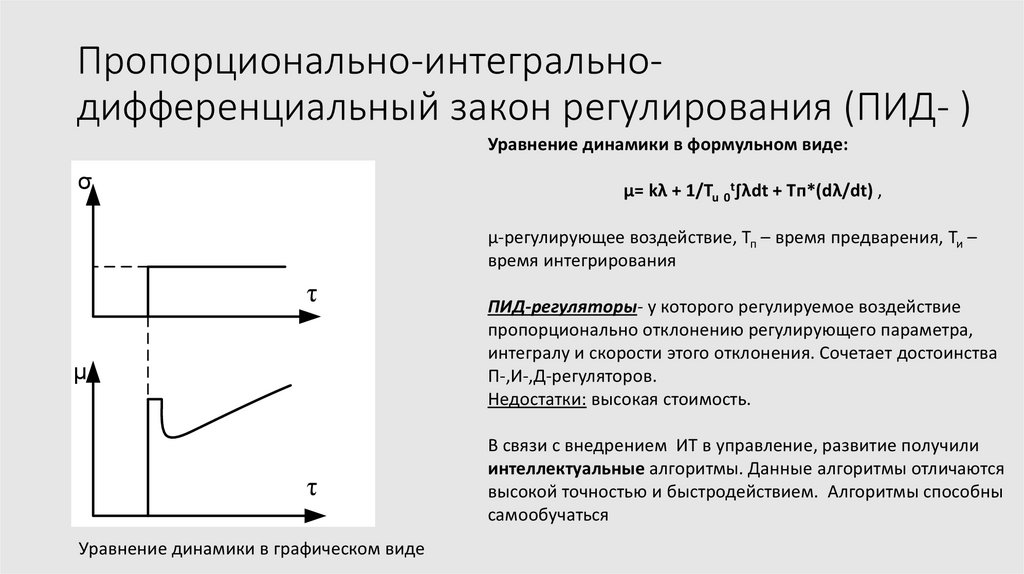
Пропорционально-интегральнодифференциальный закон регулирования (ПИД- )Уравнение динамики в формульном виде:
σ
σ
µ= kλ + 1/Tu 0t∫λdt + Tп*(dλ/dt) ,
µ-регулирующее воздействие, Тп – время предварения, Ти –
время интегрирования
τ
τ
μ
μ
τ
Уравнение динамики в графическом виде
ПИД-регуляторы- у которого регулируемое воздействие
пропорционально отклонению регулирующего параметра,
интегралу и скорости этого отклонения. Сочетает достоинства
П-,И-,Д-регуляторов.
Недостатки: высокая стоимость.
В связи с внедрением ИТ в управление, развитие получили
интеллектуальные алгоритмы. Данные алгоритмы отличаются
высокой точностью иτбыстродействием. Алгоритмы способны
самообучаться