


 Механика
МеханикаПохожие презентации:










Основные элементы локальных систем управления
1.
Лекция 6ОСНОВНЫЕ ЭЛЕМЕНТЫ ЛОКАЛЬНЫХ СИСТЕМ УПРАВЛЕНИЯ
2.
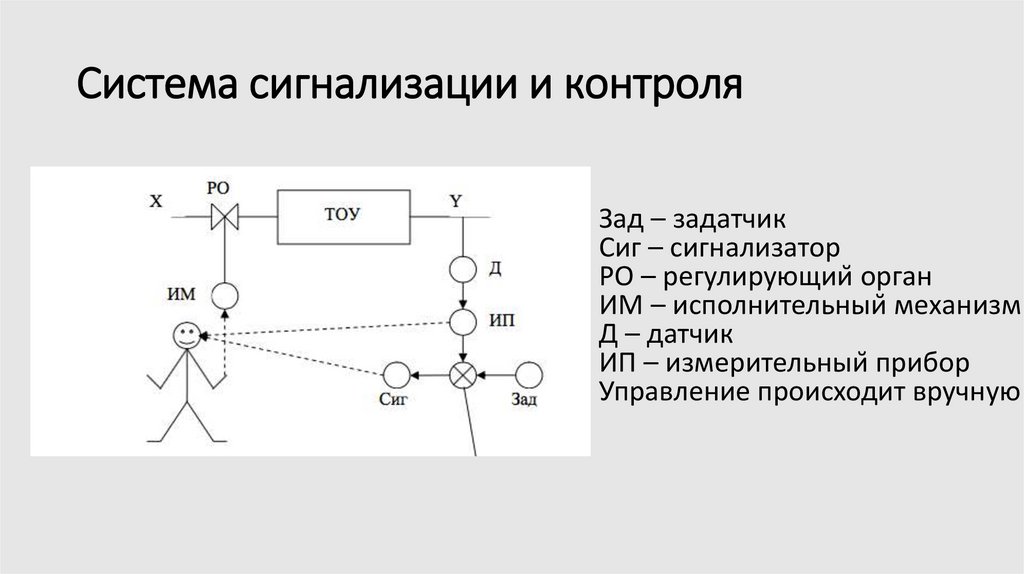
Система сигнализации и контроляЗад – задатчик
Сиг – сигнализатор
РО – регулирующий орган
ИМ – исполнительный механизм
Д – датчик
ИП – измерительный прибор
Управление происходит вручную
3.
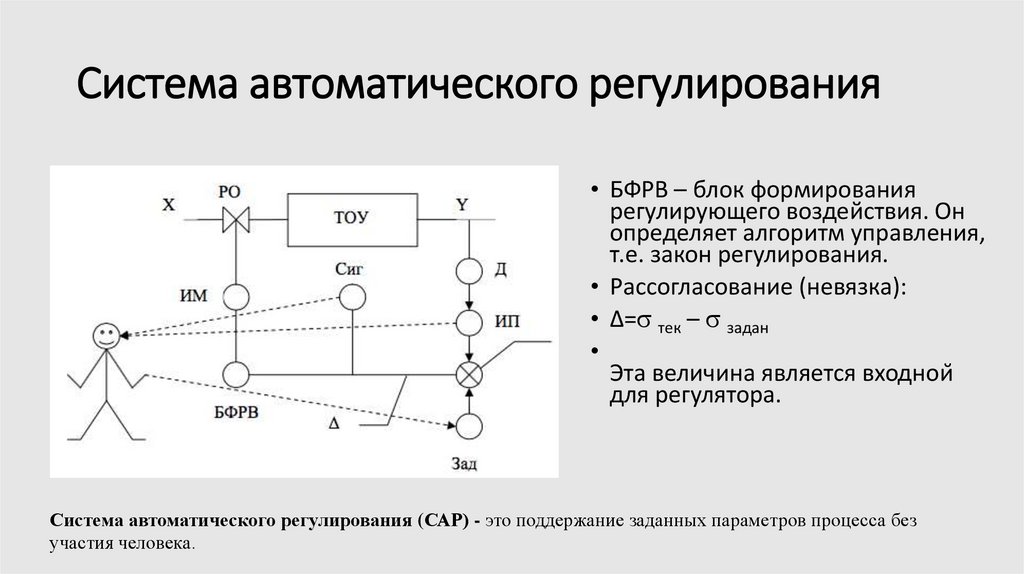
Система автоматического регулирования• БФРВ – блок формирования
регулирующего воздействия. Он
определяет алгоритм управления,
т.е. закон регулирования.
• Рассогласование (невязка):
• ∆= тек – задан
Эта величина является входной
для регулятора.
Система автоматического регулирования (САР) - это поддержание заданных параметров процесса без
участия человека.
4.
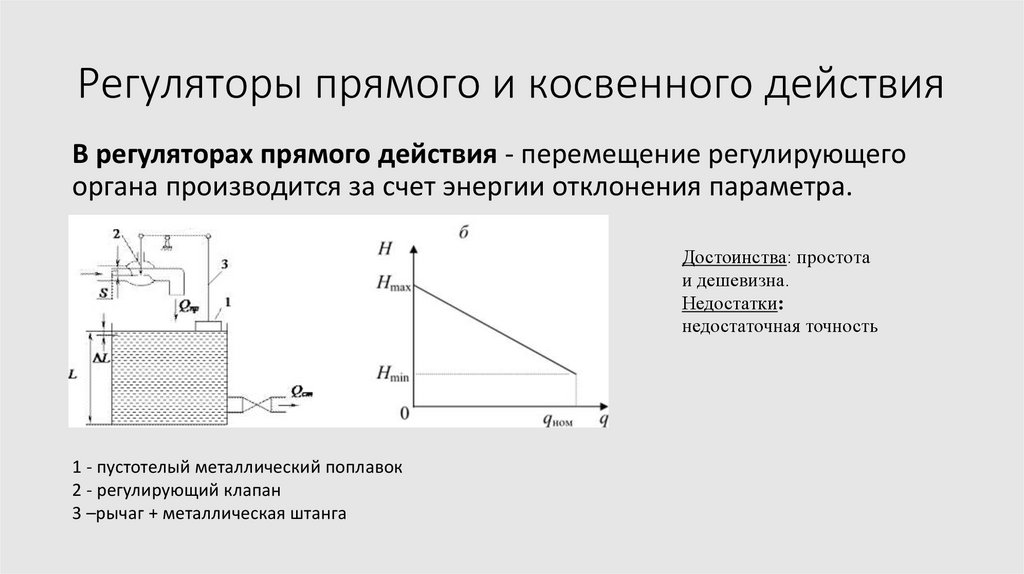
Регуляторы прямого и косвенного действияВ регуляторах прямого действия - перемещение регулирующего
органа производится за счет энергии отклонения параметра.
Достоинства: простота
и дешевизна.
Недостатки:
недостаточная точность
1 - пустотелый металлический поплавок
2 - регулирующий клапан
3 –рычаг + металлическая штанга
5.
Регуляторы прямого и косвенного действияВ регуляторах косвенного прямого действия - перемещение
регулирующего органа производится за счет внешней энергии
(электрическая, пневматическая, гидравлическая).
Структурная схема САР косвенного действия
6.
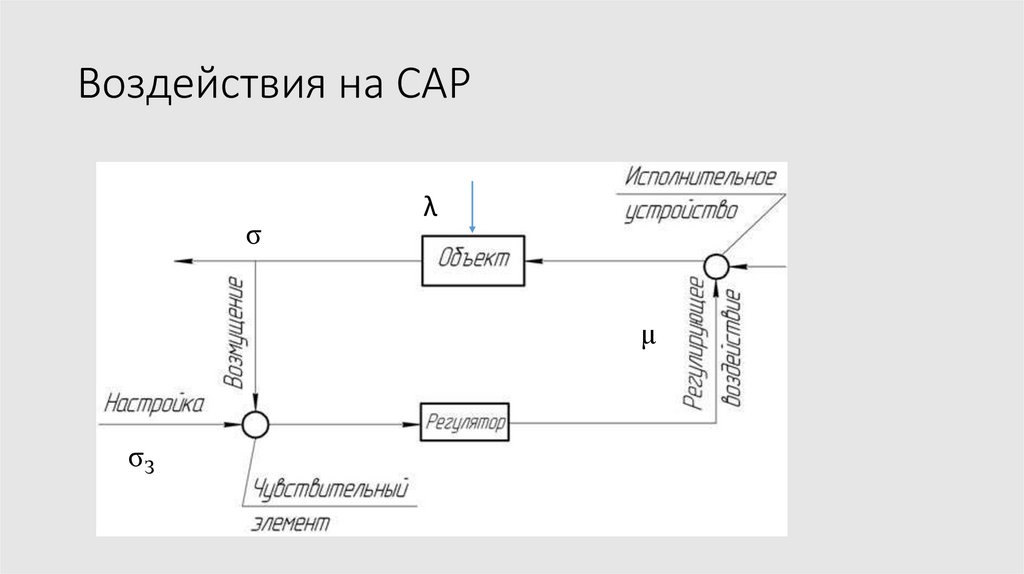
Воздействия на САРσ
λ
µ
σЗ
7.
Классификация САРВ зависимости от закона, каждому должна следовать регулируемая величина:
1) Системы автоматической стабилизации – система, в которой
регулированный параметр поддерживается на одном заданном значении
σЗ=const.
2)Системы программного регулирования, в которых регулятор параметр
изменяется по заданной программе во времени
σЗ=f(t).
3)Следящая система, в которых регулируется параметр изменяется в
зависимости от какой-либо другие величины, закон изменения какой заранее
неизвестен
σ=f(у), у- независимая переменная
8.
Классификация САРПо количеству замкнутых контуров:
1) Одноконтурные.
2)Многоконтурные
По принципу действия:
1) Непрерывного действия.
2)Прерывистого действия
По принципу регулирования:
1) САР по возмущению.
2)САР по отклонению
3)Комбинированные САР
9.
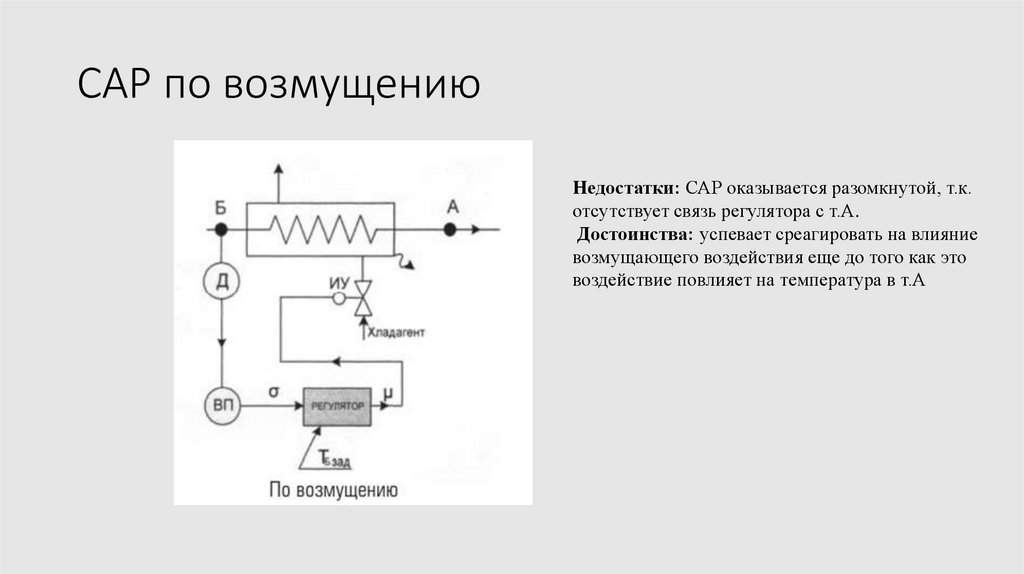
САР по возмущениюНедостатки: САР оказывается разомкнутой, т.к.
отсутствует связь регулятора с т.А.
Достоинства: успевает среагировать на влияние
возмущающего воздействия еще до того как это
воздействие повлияет на температура в т.А
10.
САР по отклонениюДостоинства: погрешность устраняется
независимо каким возмущением была вызвана.
Недостатки: инерционные, т. е сначала
возмущенные воздействия влияет на температуру в
т. А и только после этого выравнивается
регулируемое воздействие.
11.
Комбинированные САРДостоинства: сочетает достоинства 1 и 2 системы.
Недостатки: сложность регулирования