 Информатика
ИнформатикаПохожие презентации:

")
")
")


")

")

Бортовые цифровые вычислительные системы. Заключение. Тема №10
1.
Иркутский филиал федерального государственного бюджетногообразовательного учреждения высшего образования
«Московский государственный технический университет
гражданской авиации» (МГТУ ГА)
Методическая разработка
Кафедра АЭС и ПНК
ЛЕКЦИЯ № 24
по дисциплине
Бортовые цифровые вычислительные устройства
для студентов направления подготовки (специальности) 25.03.02
ТЕМА №10 Бортовые цифровые вычислительные системы
Заключение
Должность, уч. степень
Разработал Доцент, к.т.н.
Фамилия/ Подпись
Кивокурцев А.Л.
Дата
01.09.2020 г.
2.
Иркутский филиал МГТУ ГАкафедра Авиационных электросистем и пилотажнонавигационных комплексов
Лекция № 24
По дисциплине Бортовые цифровые вычислительные устройства
Тема лекции Бортовые цифровые вычислительные системы
СОДЕРЖАНИЕ
Тема 10 Бортовые цифровые вычислительные системы
10.1. Общие сведения о БЦВС.
10.2. Классификация БЦВС.
10.3. Структурная организация бортовой вычислительной системы
10.3.1. БЦВС интегрированного комплекса бортового оборудования 1
поколения (КСЦПНО).
10.3.2. Отказоустойчивая БЦВС ИКБО 2-3 поколения.
Заключение
З.1. Перспективы применения цифровой вычислительной техники на
воздушных судах
ЛИТЕРАТУРА
[5] Половов Р.М., Рощин А.Г. Бортовые вычислительные машины, системы и
комплексы. Часть 2.Тексты лекций М., МГТУ ГА, 2001 г., с.63-80.
[6] Кучерявый А.А. Бортовые информационные системы. Курс лекций.
Ульяновск, 2004 г., с.8-38.
НАГЛЯДНЫЕ ПОСОБИЯ, ПРИЛОЖЕНИЯ, ТСО
1. Мультимедийная установка
3.
Тема 10 Бортовые цифровые вычислительные системы10.1. Общие сведения о БЦВС
Бортовая цифровая вычислительная система (БЦВС) - совокупность
взаимосвязанных и тесно взаимодействующих между собой вычислительных устройств,
периферийного оборудования и программного обеспечения, предназначенных для
автоматизации процессов приема, хранения, обработки и выдачи информации и
ориентированных на достижение сверхвысокой производительности, на повышение
надежности и живучести средств вычислительной техники.
Современные БЦВС по своим свойствам приближаются к локальным
вычислительным сетям. Однако основным отличием БЦВС от локальных вычислительных
сетей общего назначения является то, что БЦВС работает в реальном масштабе времени.
Цифровые вычислительные устройства и машины, входящие в состав БЦВС относятся к
управляющим вычислительным машинам, которые должны обрабатывать информацию в
темпе ее поступления от датчиков. Процессы решения задач навигации, управления и
контроля в БЦВМ в основном являются периодическими с достаточно высокими
частотами повторения. При этом предъявляются жесткие требования по предельным
срокам решения задач. Такие вычислительные системы называются «жесткими»
системами реального времени, работоспособность которых нарушается, если решение
задач не укладывается в заданные сроки. Поэтому БЦВС можно охарактеризовать как
специализированную многомашинную «жесткую» вычислительную систему
реального времени.
В настоящее время на воздушных судах гражданской авиации применяются
сложные БЦВС, состоящие из множества цифровых вычислительных устройств и машин,
объединенных системой информационного обмена. Современные БЦВС являются
основой комплексов бортового оборудования. На БЦВС возлагается решение задач
навигации, управления, контроля и отображения информации. За счет применения БЦВС
качественно повышается эффективность комплексов бортового оборудования, возрастает
безопасность полетов.
Эффективность комплексов бортового оборудования возрастает при
применении БЦВС за счет следующих факторов:
реализации более сложных и оптимальных алгоритмов навигации, управления
летательным аппаратом, силовыми установками и бортовыми системами;
обеспечения высокой точности решения задач;
более полного учета полетных факторов;
интегрированной обработки всей имеющейся информации;
повышения уровня автоматизация решения задач управления комплекса;
повышения качества отображения информации для экипажа.
сокращения сроков и повышения качества подготовки комплекса за счет
автоматизации процессов контроля при подготовке комплекса;
уменьшения времени на поиск и устранение неисправностей за счет повышения
глубины контроля и точности диагностики бортового оборудования.
Безопасность полетов возрастает при применении БЦВС за счет следующих
факторов:
повышения точности выполнения таких сложных этапов полета, как посадка,
полет в сложных метеоусловиях, маловысотный полет и других;
повышения точности ограничения критических режимов полета;
снижения утомляемости экипажа за счет повышения уровня автоматизации
управления летательным аппаратом и бортовым оборудованием.
повышения качества подготовки к полетам.
4.
Все перечисленные преимущества достигаются при условии достаточнойнадежности, отказоустойчивости и живучести БЦВС.
В процессе проектирования БЦВУ и М, БЦВС разработчики решают
следующие основные задачи :
разработка аппаратуры бортовых вычислительных устройств и машин, их
сопряжение с бортовым оборудованием, наиболее полно удовлетворяющее задачам
комплекса;
создание эффективной программно-аппаратной системы
информационного
обмена БЦВМ между собой в вычислительной системе и обмена между БЦВМ и
бортовым оборудованием;
разработка программного обеспечения БЦВС для решения функциональных задач
комплекса и для решения задач технической эксплуатации.
В процессе технической эксплуатации БЦВС инженерно-техническим
составом решаются следующие основные задачи:
контроль исправности БЦВМ и ее сопряжения с бортовым оборудованием при
подготовке комплекса;
профилактические работы, поиск неисправностей, мелкий и средний ремонт, учет
наработки и отказов;
обучение личного состава.
Подготовка БЦВС выполняется в процессе подготовки комплекса в целом, при
этом на БЦВМ возлагается важная задача автоматизированного контроля исправности
всего оборудования комплекса.
10.2. Классификация БЦВС
Классификация БЦВС осуществляется по различным основаниям, выделим из них
6 основных:
а) По числу вычислительных машин:
- одномашинные (БЦВС ПНК Ил86);
- многомашинные (БЦВС КСЦПНО96/204).
Многомашинная БЦВС объединяет несколько независимых вычислительных
машин, каждая из которых включает свой процессор, память, каналы ввода – вывода
информации. В состав многомашинных БЦВС могут входить БЦВМ имеющие
одинаковые или различные характеристики, т.е. быть:
-однородные (однотипные БЦВМ);
-неоднородные (БЦВМ различных типов).
б) По количеству процессоров:
- однопроцессорные;
- многопроцессорные.
Многопроцессорные БЦВС – включает 2 и более процессоров, которые
функционируют под управлением единой операционной системы (управляющей
программы) на основе совместного использования общей памяти и каналов
информационного обмена.
Многопроцессорные БЦВС могут быть:
- однородные (процессоры одного типа);
- неоднородные.
в) По способам обработки информации:
- с пакетной обработкой;
- с разделением времени;
- со смешанной обработкой (используется 2 первых способа).
Способ пакетной обработки информации в БЦВС позволяет одновременно
выполнять несколько программ или отдельных независимых частей одной программы, т.е.
процесс обработки может быть параллельным.
5.
Режим разделения времени означает, что БЦВС поочередно (или по определенномузакону) на короткое время последовательно переключается на исполнение какой-либо
задачи БЦВС, одновременно может взаимодействовать с несколькими бортовыми
системами. В случае одномашинных БЦВС – это возможно при высоком ее
быстродействии.
г) По структуре:
- с переменной структурой (ЦВМ-80 самолеты:Ту-204, Ан-70);
- с постоянной структурой (ЦВМ-20 самолеты: Ил86, Як42).
В БЦВС с переменной структурой могут меняться состав функциональных
устройств и связи между ними.
В БЦВС с постоянной структурой не могут иметь возможности модернизации.
д) По способу управления:
- централизованные (БЦВС НК с-ты: Ил-86, Як-42)
(центральная ЦВМ-20 и специализированные вычислители);
- децентрализованные (федеративные) – связь всех систем комплекса бортового
оборудования осуществляется с помощью двух ЦВС: ЦВМ80№1, ЦВМ80№2 (ВСС85 КСЦПНО-96/204 самолетов: Ту204, Ил96) ;
- со смешанным управлением (иерархическая) (ИКБО-95 самолетов: Бе200, Ту204300, Ил96-300) – БЦВС включает несколько уровней, взаимосвязанных между
собой, что позволяет повысить быстродействие и надежность.
В БЦВС с централизованным управлением всеми функциональными устройствами
управляет центральная машина, называемая диспетчером. В многомашинных БЦВС с
централизованным управлением в качестве диспетчера - может использоваться одна из
БЦВМ.
В
БЦВС децентрализованным управлением вычислительной функции
распределяются между различными и независимыми с точки зрения управления БЦВМ,
каждая из которых ориентирована на решение определенного набора задач.
В БЦВС со смешанным управлением сочетается принцип централизованного и
децентрализованного управления. Данный тип БЦВС еще называют иерархическим. Здесь
разделение задач решаемых в БЦВС соответствует уровням (этапам) обработки
информации
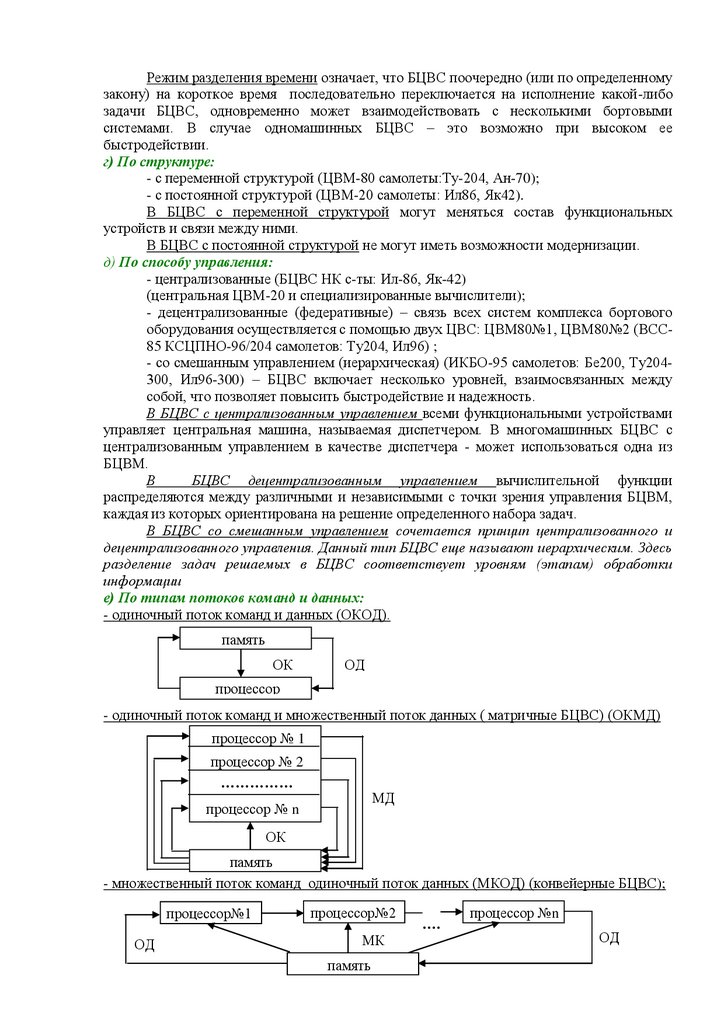
е) По типам потоков команд и данных:
- одиночный поток команд и данных (ОКОД).
память
ОК
ОД
процессор
- одиночный поток команд и множественный поток данных ( матричные БЦВС) (ОКМД)
процессор № 1
процессор № 2
……………
МД
процессор № n
ОК
память
- множественный поток команд одиночный поток данных (МКОД) (конвейерные БЦВС);
процессор№1
ОД
процессор№2
МК
память
….
процессор №n
ОД
6.
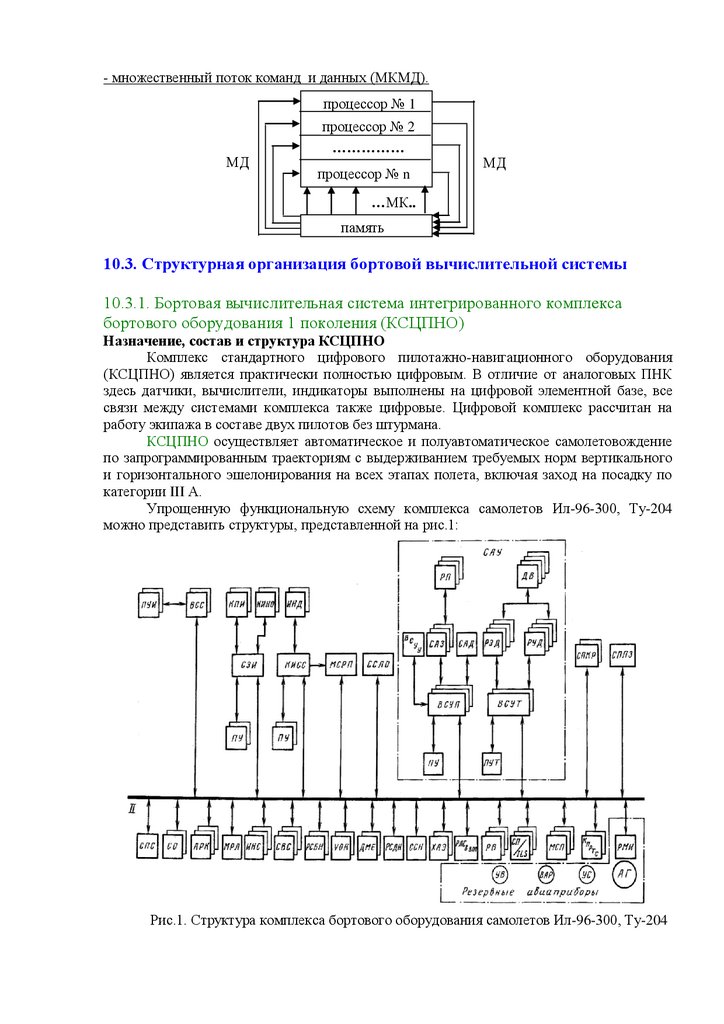
- множественный поток команд и данных (МКМД).процессор № 1
МД
процессор № 2
……………
процессор № n
МД
…МК..
память
10.3. Структурная организация бортовой вычислительной системы
10.3.1. Бортовая вычислительная система интегрированного комплекса
бортового оборудования 1 поколения (КСЦПНО)
Назначение, состав и структура КСЦПНО
Комплекс стандартного цифрового пилотажно-навигационного оборудования
(КСЦПНО) является практически полностью цифровым. В отличие от аналоговых ПНК
здесь датчики, вычислители, индикаторы выполнены на цифровой элементной базе, все
связи между системами комплекса также цифровые. Цифровой комплекс рассчитан на
работу экипажа в составе двух пилотов без штурмана.
КСЦПНО осуществляет автоматическое и полуавтоматическое самолетовождение
по запрограммированным траекториям с выдерживанием требуемых норм вертикального
и горизонтального эшелонирования на всех этапах полета, включая заход на посадку по
категории III А.
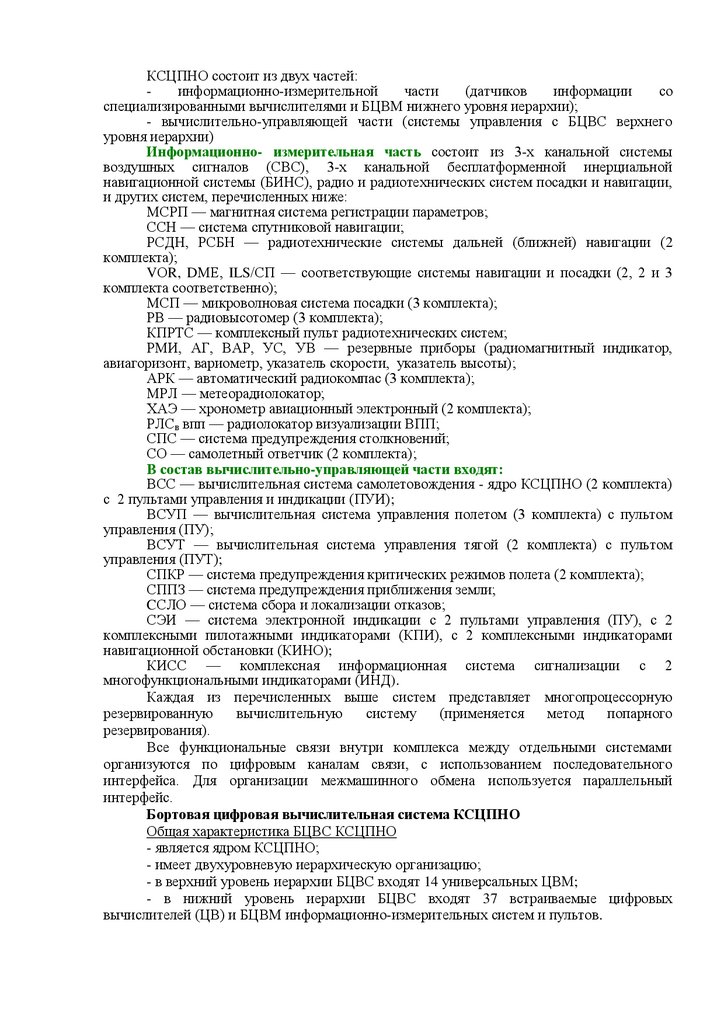
Упрощенную функциональную схему комплекса самолетов Ил-96-300, Ту-204
можно представить структуры, представленной на рис.1:
Рис.1. Структура комплекса бортового оборудования самолетов Ил-96-300, Ту-204
7.
КСЦПНО состоит из двух частей:информационно-измерительной
части
(датчиков
информации
со
специализированными вычислителями и БЦВМ нижнего уровня иерархии);
- вычислительно-управляющей части (системы управления с БЦВС верхнего
уровня иерархии)
Информационно- измерительная часть состоит из 3-х канальной системы
воздушных сигналов (СВС), 3-х канальной бесплатформенной инерциальной
навигационной системы (БИНС), радио и радиотехнических систем посадки и навигации,
и других систем, перечисленных ниже:
МСРП — магнитная система регистрации параметров;
ССН — система спутниковой навигации;
РСДН, РСБН — радиотехнические системы дальней (ближней) навигации (2
комплекта);
VОR, DМЕ, ILS/СП — соответствующие системы навигации и посадки (2, 2 и 3
комплекта соответственно);
МСП — микроволновая система посадки (3 комплекта);
РВ — радиовысотомер (3 комплекта);
КПРТС — комплексный пульт радиотехнических систем;
РМИ, АГ, ВАР, УС, УВ — резервные приборы (радиомагнитный индикатор,
авиагоризонт, вариометр, указатель скорости, указатель высоты);
АРК — автоматический радиокомпас (3 комплекта);
МРЛ — метеорадиолокатор;
ХАЭ — хронометр авиационный электронный (2 комплекта);
РЛСв впп — радиолокатор визуализации ВПП;
СПС — система предупреждения столкновений;
СО — самолетный ответчик (2 комплекта);
В состав вычислительно-управляющей части входят:
ВСС — вычислительная система самолетовождения - ядро КСЦПНО (2 комплекта)
с 2 пультами управления и индикации (ПУИ);
ВСУП — вычислительная система управления полетом (3 комплекта) с пультом
управления (ПУ);
ВСУТ — вычислительная система управления тягой (2 комплекта) с пультом
управления (ПУТ);
СПКР — система предупреждения критических режимов полета (2 комплекта);
СППЗ — система предупреждения приближения земли;
CСЛО — система сбора и локализации отказов;
СЭИ — система электронной индикации с 2 пультами управления (ПУ), с 2
комплексными пилотажными индикаторами (КПИ), с 2 комплексными индикаторами
навигационной обстановки (КИНО);
КИСС — комплексная информационная система сигнализации с 2
многофункциональными индикаторами (ИНД).
Каждая из перечисленных выше систем представляет многопроцессорную
резервированную
вычислительную
систему
(применяется
метод
попарного
резервирования).
Все функциональные связи внутри комплекса между отдельными системами
организуются по цифровым каналам связи, с использованием последовательного
интерфейса. Для организации межмашинного обмена используется параллельный
интерфейс.
Бортовая цифровая вычислительная система КСЦПНО
Общая характеристика БЦВС КСЦПНО
- является ядром КСЦПНО;
- имеет двухуровневую иерархическую организацию;
- в верхний уровень иерархии БЦВС входят 14 универсальных ЦВМ;
- в нижний уровень иерархии БЦВС входят 37 встраиваемые цифровых
вычислителей (ЦВ) и БЦВМ информационно-измерительных систем и пультов.
8.
- структурная организация БЦВС реализована по принципу ЗМ (модульность,магистральность и микропрограммное управление).
Особенности построения БЦВС КСПНО:
- унификация и модульная организация бортовых ЦВМ на основе
унифицированного ряда информационно, логически, электрически и энергетически
совместимых конструктивно-функциональных модулей (КФМ) микропроцессорных ЦВМ,
запоминающих устройств, устройств ввода-вывода (УВВ) и вторичных источников
питания;
- мультипроцессорная организация бортовых ЦВМ;
- унификация и модульная иерархическая организация бортового программного
обеспечения;
- автоматизация программирования на базе использования языка высокого уровня
"Паскаль", "Си" и машинно-ориентированного языка "АССЕМБЛЕР" микропроцессорных
ЦВМ на базе МПК БИС К1804 и других серий;
- унификация аппаратных и программных средств контроля и отладки БЦВМ и их
программного обеспечения на базе серийных микроЭВМ , их периферийных устройств и
программного обеспечения (например, рабочее место программиста РМП-85);
- преимущественное применения больших (БИС) и сверхбольших интегральных
схем (СБИС).
Встраиваемые ЦВМ и ЦВ нижнего уровня иерархии образуют ядро бортовых
информационно-измерительных систем. В состав информационно-измерительной
системы входят датчики первичной информации, ЦВМ или цифровые вычислители,
устройства ввода-вывода, исполнительные элементы и вторичные источники питания.
Датчики информации, исполнительные элементы и, следовательно, устройства
ввода-вывода обычно специфичны для каждой информационной системы, что затрудняет
их унификацию. Требования к вычислительным характеристикам ЦВМ, ЦВ близки, что
позволяет унифицировать модуль микропроцессорных ЦВМ.
Общие характеристики встраиваемым ЦВМ, ЦВ нижнего уровня иерархии:
- предъявляются высокие требования по энергопотреблению, габаритным
размерам, массе и эксплуатационным характеристикам;
- составляет около 80% общего числа вычислителей КСЦПНО;
- быстродействие встраиваемых ЦВ 100...500 тыс. оп/с типа регистр—регистр;
- архитектура модулей микроЭВМ цифровых вычислителей допускает
возможность построения как однопроцессорных, так и многопроцессорных БЦВМ.
БЦВМ верхнего уровня иерархии имеют широкий диапазон вычислительных,
массогабаритных и эксплуатационных характеристик.
Общие характеристики БЦВМ верхнего уровня иерархии:
- являются ЦВМ параллельного типа, асинхронными, работающими с операндами с
фиксированной и плавающей запятой;
- принцип структурной организации — модульность, магистральность и
микропрограммное управление;
- имеют формат данных 16-32 двоичных разряда;
- быстродействие 800 тыс. оп/с регистр — регистр;
- потребляемая мощность составляет 20...170 Вт, масса 2...15 кг.;
- наработка на отказ 3000...15 000 ч;
- качестве базовой модели используются машины семейства ЦВМ 80-40ХХХ.
ЦВМ 80-40ХХХ это БЦВМ третьего поколения, в них использованы иерархическая
память, включающая сверхоперативную память (регистры общего назначения),
многоуровневая система прерывания, каналы прямого доступа к памяти, а также
механизмы защиты информации от несанкционированного доступа. В структуре бортовых
машин третьего поколения применяются средства поддержки мультипроцессирования.
Структура этих БЦВМ имеет в основном магистрально-модульную организацию и
9.
допускает изменение характеристик машины в достаточно широких пределах путемиспользования необходимого количества соответствующих (унифицированных) модулей,
т. е. приобретает некоторую открытость.
10.3.2. Отказоустойчивая БЦВС ИКБО 2-3 поколения.
Преимущества применения мультиплексных каналов в БЦВС:
сокращение числа связей в системе;
повышение надежности передачи информации;
стандартизация интерфейсов;
обеспечение гибкости системы за счет возможности перепрограммирования
логических связей в системе;
- обеспечение единого информационного поля для построения интегрированных
комплексов.
Условия применения мультиплексных каналов в БЦВС:
- применение высокоскоростных линий передачи информации;
- высокая степень интеграции аппаратуры сопряжения с линиями передачи
информации, обеспечивающая ее достаточно малую массу, габариты и
потребляемую мощность.
Важнейшие свойства БЦВС с МКИО:
1) БЦВС становится подобной локальной вычислительной сети, при этом
появляется возможность совместного использования вычислительных ресурсов Все это
позволяет применять её вычислительные средства оптимальным образом,
перераспределяя их в интересах решения задач текущего этапа полета.
2) Появляется возможность программирования БЦВС, то есть задание ее
логической структуры и организации программным способом, без изменения аппаратуры.
Данное свойство позволяет обеспечивать работоспособность БЦВС при отказах и
боевых повреждениях за счет реконфигурации системы, то есть за счет
перераспределения решаемых задач между работоспособными компонентами системы.
При этом обеспечивается высокий уровень живучести и отказоустойчивости БЦВС и
комплекса в целом.
Аппаратура мультиплексного канала:
- линии передачи информации;
- цифровые модемы (модули обмена, контроллеры).
Функции модуля обмена МКИО:
- обеспечение преобразования, передачи и приема сигналов с заданными
характеристиками;
- обеспечение физического соединения абонентов - источников информации и
абонентов – приемников информации;
- поддержка форматов передаваемой информации;
- буферизация передаваемой информации, то есть ее временное хранение;
- контроль передачи информации;
- обеспечение взаимодействия с аппаратурой БЦВМ или оконечного устройства.
Управление передачей сообщений между множеством абонентов мультиплексного
канала является многоуровневым и реализуется с помощью аппаратуры модема,
программного обеспечения модема и программного обеспечения БЦВМ или оконечного
устройства. Правила управления обменом называются протоколом информационного
обмена. Каждый уровень управления имеет свой протокол. Нижние уровни управления
обменом реализуются аппаратно, с помощью аппаратуры модулей обмена. Верхние
уровни управления обменом реализуются программно. Протоколы обмена реализуются
программно-аппаратным способом с помощью программ управления обменом, входящих
-
10.
в состав операционной системы БЦВМ, аппаратуры и программ модулей обменамультиплексного канала.
При этом БЦВС можно рассматривать как специализированную локальную
вычислительную сеть, в которой выполняется коммуникация БЦВМ, то есть установление
связей между БЦВМ путем создания временных логических соединений.
Общие принципы управления межкомпьютерной связью в вычислительных сетях
называются моделью OSI/ISO, то есть моделью взаимодействия открытых систем
(OSI - Open System Interconnection), которая разработана международной организацией
по стандартизации ISO (International Organization for Standardization).
Модель
OSI/ISO устанавливает стандарт на межкомпьютерную связь, в
соответствии с которым управление связью делится на семь уровней:
физический, канальный, сетевой, транспортный, сеансовый, представительский и
прикладной.
Физический уровень является нижним и обеспечивает передачу и прием
физических сигналов, передаваемых по линии. В БЦВС он реализуется аппаратно
устройствами выдачи и приема биполярных кодов модулей обмена.
Канальный уровень обеспечивает доступ к сети и обнаружение конфликтов
(нижний подуровень канального уровня), а также формирование передаваемых порций
информации (кадров, слов) и контроль ошибок передачи (верхний подуровень канального
уровня) и реализуется программно-аппратным способом модулями обмена МКИО.
Сетевой уровень обеспечивает установление и поддержание маршрута передачи
информации. Информация в сложных сетях не всегда передается по прямому маршруту от
отправителя к получателю: по пути она может маршрутизироваться от одного узла сети к
другому, а также разбиваться на пакеты при передаче больших объемов данных. В БЦВС
заранее известны маршруты передачи информация, а передаваемые сообщения, как
правило, не требуется разбивать, так как они относительно небольшие. Установление
маршрута передачи информации выполняется с помощью командных слов КС, которые
передает контроллер МКИО. Маршрут передачи информации поддерживается до
получения уведомления о приеме в виде ответного слова ОС от модуля обмена абонента.
Транспортный уровень обеспечивает упаковку и распаковку сообщений,
распознавание и коррекцию ошибок передачи сообщений, отправление уведомлений о
приеме сообщений. В БЦВС транспортный уровень реализуется программно-аппаратным
способом с помощью модуля обмена. Уведомления о приеме сообщений посылаются
модулями обмена в виде ответных слов ОС.
Сеансовый уровень обеспечивает выполнение сеанса связи, то есть установление,
использование и завершение соединения между компьютерами. В случае сбоя этот
уровень обеспечивает повторную передачу данных. В БЦВС сеансовый уровень, кроме
того, выполняет передачу данных по резервной мультиплексной линии при отказе
основной линии (если повторная передача по основной линии после сбоя выполнена
неправильно).
Представительский уровень обеспечивает преобразование передаваемых данных из
исходного формата в промежуточный формат при передаче и обратное преобразование
при приеме. На этом уровне выполняется шифрование данных и сжатие данных, если это
необходимо.
Прикладной уровень является высшим уровнем управления межкомпьютерной
связью. Задачи, выполняемые прикладным уровнем, зависят от назначения сети.
Прикладной уровень обеспечивает взаимодействие прикладных программ БЦВМ.
Каждый из уровней управления характеризуется своим протоколом. Бортовая
вычислительная система является специализированной, при этом требуется сокращение
времени управления связью (информационным обменом). Поэтому в БЦВС функции
уровней управления обменом упрощены, а число уровней сокращено. С целью упрощения
11.
управления обменом для каждой БЦВМ заранее назначаются маршруты и направленияпередачи информации, размеры сообщений и периодичность их повторения.
Далее
взаимодействие отдельных БЦВМ в вычислительной системе
рассматривается обобщенно, при совместном рассмотрении нескольких уровней
управления, которые представляются обобщенным протоколом информационного обмена,
выполняющим функции нескольких уровней, реализующих метод доступа к каналу,
управление передачей сообщений между БЦВМ и устранение сбоев. Применительно к
модели управления обменом OSI/ISO обобщенный протокол обмена реализует совместно
канальный, сетевой, транспортный и сеансовый уровни управления.
Физический уровень управления учитывается при работе аппаратуры модулей
обмена. Представительский и прикладной уровни управления
учитываются в
программном обеспечении БЦВМ.
Рассмотрим отказоустойчивую структуру БЦВС с мультиплексными
каналами обмена.
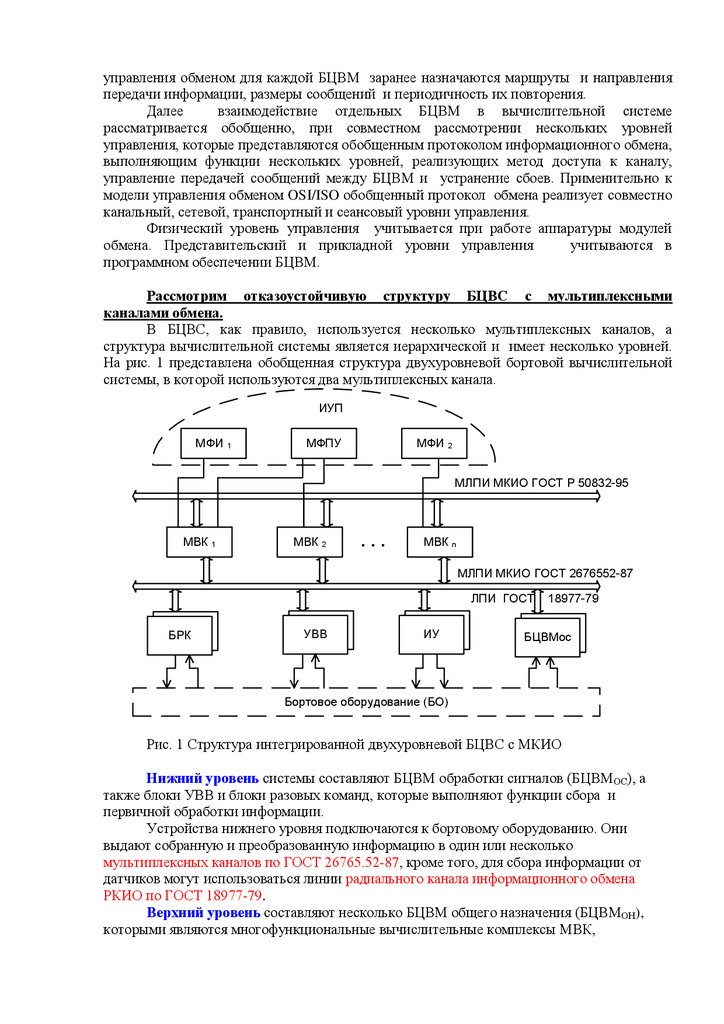
В БЦВС, как правило, используется несколько мультиплексных каналов, а
структура вычислительной системы является иерархической и имеет несколько уровней.
На рис. 1 представлена обобщенная структура двухуровневой бортовой вычислительной
системы, в которой используются два мультиплексных канала.
ИУП
МФИ 1
МФПУ
МФИ 2
МЛПИ МКИО ГОСТ Р 50832-95
МВК 1
МВК 2
...
МВК n
МЛПИ МКИО ГОСТ 2676552-87
ЛПИ ГОСТ
БРК
УВВ
ИУ
18977-79
БЦВМос
Бортовое оборудование (БО)
Рис. 1 Структура интегрированной двухуровневой БЦВС с МКИО
Нижний уровень системы составляют БЦВМ обработки сигналов (БЦВМОС), а
также блоки УВВ и блоки разовых команд, которые выполняют функции сбора и
первичной обработки информации.
Устройства нижнего уровня подключаются к бортовому оборудованию. Они
выдают собранную и преобразованную информацию в один или несколько
мультиплексных каналов по ГОСТ 26765.52-87, кроме того, для сбора информации от
датчиков могут использоваться линии радиального канала информационного обмена
РКИО по ГОСТ 18977-79.
Верхний уровень составляют несколько БЦВМ общего назначения (БЦВМОН),
которыми являются многофункциональные вычислительные комплексы МВК,
12.
подключенные к электрической МЛПИ нижнего уровня и, кроме того, сопрягаемые междусобой с помощью оптической МЛПИ по ГОСТ Р 50832-95.
Информационно-управляющее поле системы ИУП представлено двумя
многофункциональными индикаторами МФИ и многофункциональным пультом
управления МФПУ.
Организация обмена в рамках одного уровня системы при использовании
одного мультиплексного канала.
Структура рассматриваемой вычислительной системы при этом является
магистральной. Управление передачей информации по МКИО может быть
централизованным, с помощью одного контроллера МКИО, либо децентрализованным, с
помощью нескольких контроллеров. При этом различаются синхронный и асинхронный
способы организации обмена.
Синхронный обмен предусматривает выполнение сеансов обмена между парами
абонентов канала по заданной временной диаграмме (циклограмме), которая
периодически повторяется. В циклограмме жестко определена очередность и интервалы
времени передачи информации (сеансы обмена) между парами абонентов. Асинхронный
обмен выполняется по запросам от абонентов, которые поступают в произвольные
моменты времени и могут образовывать очереди. Запросы на обмен удовлетворяются по
определённому правилу (протоколу). Применяются протоколы обмена, подобные тем,
которые используются в локальных вычислительных сетях.
Основные виды протоколов бортовых систем
1. Протокол синхронного централизованного обмена. Данный протокол является
наиболее простым. В этом случае контроллер организует обмен по сигналам прерывания
таймера, при этом он периодически посылает по МЛПИ командные слова для абонентовисточников и абонентов-приемников, которые обмениваются информационными
сообщениями. Если требуется выполнять обмен для разных абонентов с различными
частотами, то наиболее рационально построение циклограммы синхронного обмена по
принципу двоичного счетчика. При этом частоты повторения сеансов обмена выбираются
из ряда: {f1, f2=f1/2, f3=f1/4,…}, f1=1/ t, где t – период повторения сеанса обмена с
наибольшей частотой. При такой организации обмена можно построить циклограмму, в
которой за каждый малый период t выполняется не более двух сеансов обмена.
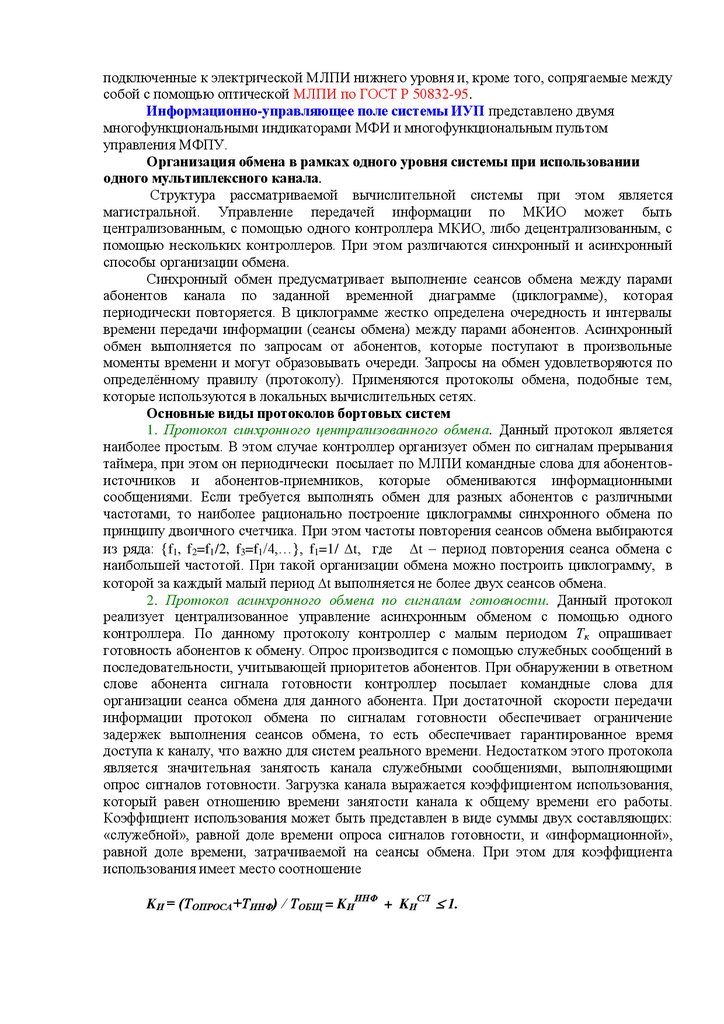
2. Протокол асинхронного обмена по сигналам готовности. Данный протокол
реализует централизованное управление асинхронным обменом с помощью одного
контроллера. По данному протоколу контроллер с малым периодом Тк опрашивает
готовность абонентов к обмену. Опрос производится с помощью служебных сообщений в
последовательности, учитывающей приоритетов абонентов. При обнаружении в ответном
слове абонента сигнала готовности контроллер посылает командные слова для
организации сеанса обмена для данного абонента. При достаточной скорости передачи
информации протокол обмена по сигналам готовности обеспечивает ограничение
задержек выполнения сеансов обмена, то есть обеспечивает гарантированное время
доступа к каналу, что важно для систем реального времени. Недостатком этого протокола
является значительная занятость канала служебными сообщениями, выполняющими
опрос сигналов готовности. Загрузка канала выражается коэффициентом использования,
который равен отношению времени занятости канала к общему времени его работы.
Коэффициент использования может быть представлен в виде суммы двух составляющих:
«служебной», равной доле времени опроса сигналов готовности, и «информационной»,
равной доле времени, затрачиваемой на сеансы обмена. При этом для коэффициента
использования имеет место соотношение
KИ = (ТОПРОСА+ТИНФ) / ТОБЩ = KИИНФ + KИСЛ 1.
13.
Здесь ТОПРОСА – время, затрачиваемое на опрос сигналов готовности. Так какпериод опроса сигналов готовности Тк должен быть значительно меньше величины
минимального периода формирования сигналов готовности, то «служебная»
составляющая
коэффициента
использования
может
значительно
превышать
«информационную» составляющую.
3. Протокол асинхронного обмена с передачей маркера. Данный протокол
реализует децентрализованное управление асинхронным обменом с помощью системы
контроллеров, которыми поочередно становятся модули обмена абонентов МКИО.
Контроллером поочередно является каждый из абонентов, и право на управление каналом
передается по эстафете по логическому кольцу либо по некоторой более сложной
стратегии, например, по вложенным логическим кольцам. Передача управления
выполняется с помощью служебного сообщения, командное слово которого содержит код
операции «Принять управление каналом». Такое сообщение называется маркером.
Модуль обмена абонента, принявший маркер, переключается из пассивного в активный
режим и становится контроллером. Модуль обмена абонента, передавшего маркер,
переключается из активного в пассивный режим и перестает выполнять функции
контроллера.
Далее модуль обмена, принявший маркер, управляет выполнением
собственного сеанса обмена, а затем передает маркер по эстафете, либо сразу передает
маркер по эстафете, если в момент получения маркера он не готов к обмену.
Особенностью протокола с передачей маркера является полная занятость канала, так как,
если не передается информация, то передается маркер. При этом для коэффициента
использования имеет место соотношение
KИ = (ТМАРКЕРА+ТИНФ) / ТОБЩ = KИИНФ + KИСЛ = 1.
Где ТМАРКЕРА – время, затрачиваемое на передачу маркера.
При достаточной скорости передачи информации протокол с передачей маркера
обеспечивает гарантированное время доступа к каналу. Недостатком данного протокола
является большое число переключений МО, что увеличивает вероятность потери маркера.
Для данного протокола «служебная» составляющая коэффициента использования также
значительно превышает «информационную» составляющую.
З.1.Перспективы применения цифровой вычислительной техники на
воздушных судах.
Основные направления и проблемы развития
систем комплексов авиационного оборудования
бортовых вычислительных
Существующие бортовые цифровые вычислительные системы строятся по
многомашинному типу. БЦВМ в таких системах являются ориентированными на
конкретные типы систем авиационного бортового оборудования.
Помимо недостаточной вычислительной производительности, можно выделить
следующие недостатки существующих бортовых вычислительных систем:
- затруднено построение интегрированных комплексов;
- затруднена модернизация комплексов путем замены морально устаревшего
оборудования;
- имеет место высокая стоимость бортовых вычислительных систем.
Последний фактор обусловлен слабым использованием коммерческих образцов
вычислительной техники, которые дешевле и развиваются значительно быстрее за счет
хорошего финансирования.
В современных условиях к БЦВС предъявляются новые требования:
- необходимо
радикально
повысить
производительность
бортовых
вычислительных систем, для обеспечения обработки графической информации и
14.
реализации новых сложных алгоритмов решения задач навигации, управления иконтроля;
- требуется обеспечить комплексную обработку всех имеющихся данных
(интегрированную обработку данных) в целях реализации оптимизации и
повышения точности решения алгоритмов навигации, управления и контроля;
- требуется обеспечить гибкость, открытость и масштабируемость БЦВС в
целях сокращения сроков разработки и модернизации авиационных комплексов;
- требуется
обеспечить
качественно
новый
уровень
надежности,
отказоустойчивости, живучести и ремонтопригодности БЦВС;
- необходимо снизить темп роста стоимости БЦВС.
Перспективная концепция развития БЦВС основана на обеспечении
интегрированной обработки данных и максимальном использовании постоянно
обновляющихся передовых достижений коммерческих программных и аппаратных
средств вычислительной техники.
Для этого БЦВС должна строиться как открытая система, которая должна обладать
свойством масштабирования, то есть позволять легко переноситься на бортовое
оборудование различного объема и сложности и наращиваться по мере необходимости.
Основные направления развития БЦВС:
1)Развитие элементной базы.
- Элементная база и далее развивается в направлении увеличения степени
интеграции элементов при уменьшении топологических норм производства интегральных
микросхем.
- Увеличение степени интеграции обеспечивает повышение быстродействия,
повышения надежности, снижение массы и габаритов вычислительных устройств и
машин и развитие их архитектуры. За счет развития элементной базы вычислительные
машины и устройства приобретают качественно новые свойства.
- Перспективным является более широкое применение коммерческих стандартов и
элементов, что значительно снижает стоимость БЦВС.
- В качестве элементной базы для высокоскоростных интерфейсов все более
широкое применение находят волоконно-оптические линии передачи информации,
которые обеспечивают увеличение скорости передачи на несколько порядков.
- При повышении степени интеграции увеличивается число логических элементов,
реализуемых в микросхемах, и увеличивается потребляемая ими мощность. В связи с этим
возникает проблема отвода тепла, которая решается комплексно: за счет снижения
напряжения питания и за счет применения более совершенных систем охлаждения.
2.Развитие архитектуры БЦВС.
- БЦВС должна обеспечивать построение интегрированных комплексов при
минимальных задержках передачи информации. Для этого развитие архитектуры БЦВС
происходит в направлении, обеспечивающем создание на борту ЛА так называемой
интегрированной вычислительной среды (ИВС). Для создания интегрированной
вычислительной среды БЦВС представляется в виде совокупности ядра, нескольких
локальных вычислительных сетей отдельных комплексов и вычислительных средств
нижнего уровня для сбора и первичной обработки информации.
- Отдельно следует выделить важность обеспечения стандартизации
интерфейсов для сопряжения компонент БЦВС.
- Для обеспечения
все более растущих требований к вычислительной
производительности
ядро
вычислительной
системы
реализуется
в
виде
многопроцессорной вычислительной системы, в которой отдельные вычислители также
могут быть многопроцессорными.
- Процессоры ядра БЦВС объединяются между собой в единую вычислительную
сеть нового типа, так называемую «переключательную сеть». Переключательная сеть
15.
является многоканальной сетью связи, предназначенной для повышения эффективностиобмена. Переключательная сеть строится на основе многовходовых переключателей
(коммутаторов), предназначенных для быстрого перенаправления потоков информации. С
помощью переключательной сети объединяется множество вычислителей между собой, а
также выполняется их сопряжение с нижними уровнями вычислительной системы.
Применение многовходовых коммутаторов обеспечивает минимальные задержки
передачи информации.
- Для создания переключательной сети используется стандарт SCI/RT (Scalable
Coherent Interface / Real Time), который также называется стандартом расширяемого
связного интерфейса РСИ. Другое название переключательной сети - «когерентная»
сеть.
Стандарт SCI/RT обеспечивает создание распределенной «рефлективной» памяти.
В распределенной «рефлективной» памяти вся поступающая информация с очень малыми
задержками обновляется в памяти каждого процессора. Это обеспечивает возможность
интегрированного решения задач коллективом процессоров при высокой степени
надежности.
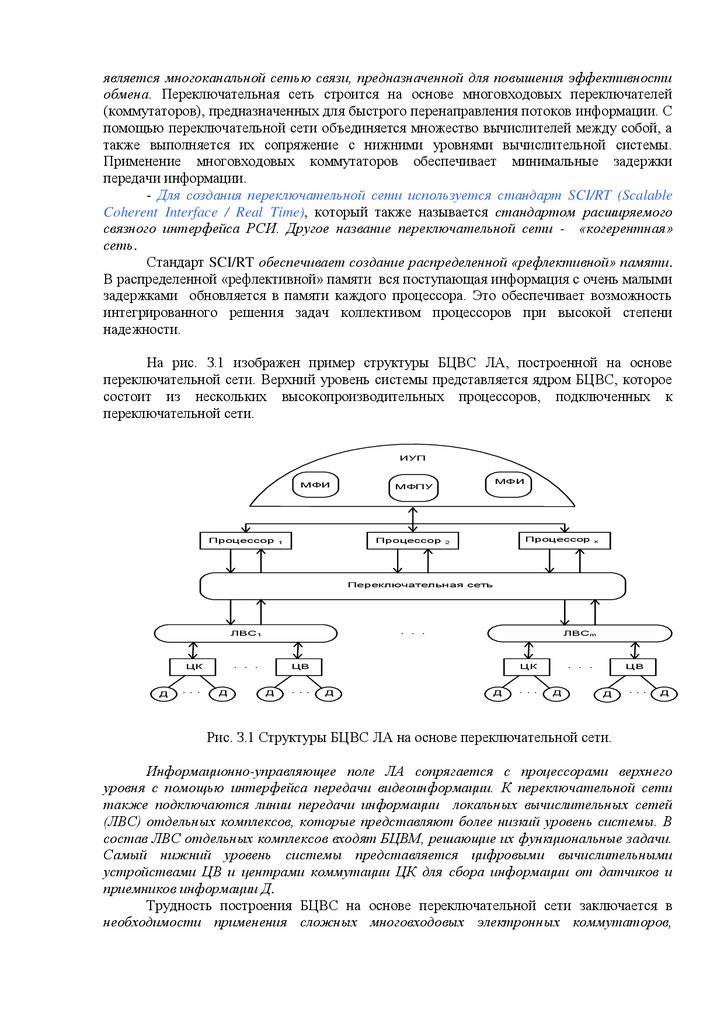
На рис. З.1 изображен пример структуры БЦВС ЛА, построенной на основе
переключательной сети. Верхний уровень системы представляется ядром БЦВС, которое
состоит из нескольких высокопроизводительных процессоров, подключенных к
переключательной сети.
ИУП
МФИ
Процессор 1
МФПУ
МФИ
Процессор к
Процессор 2
Переключательная сеть
.
ЛВС1
.
ЦК
Д
. . .
Д
.
.
.
.
ЛВСm
ЦВ
Д
. . .
.
ЦК
Д
Д
. . .
Д
.
.
ЦВ
Д
. . .
Д
Рис. З.1 Структуры БЦВС ЛА на основе переключательной сети.
Информационно-управляющее поле ЛА сопрягается с процессорами верхнего
уровня с помощью интерфейса передачи видеоинформации. К переключательной сети
также подключаются линии передачи информации локальных вычислительных сетей
(ЛВС) отдельных комплексов, которые представляют более низкий уровень системы. В
состав ЛВС отдельных комплексов входят БЦВМ, решающие их функциональные задачи.
Самый нижний уровень системы представляется цифровыми вычислительными
устройствами ЦВ и центрами коммутации ЦК для сбора информации от датчиков и
приемников информации Д.
Трудность построения БЦВС на основе переключательной сети заключается в
необходимости применения сложных многовходовых электронных коммутаторов,
16.
выполняющих одновременно несколько коммутационных процессов множестваинтерфейсов.
Коммутатор переключательной сети выполняет три функции:
- коммутацию цепей передачи информации;
- концентрацию (мультиплексирование) – сбор информации;
- деконцентрацию (демультиплексирование) – распределение информации.
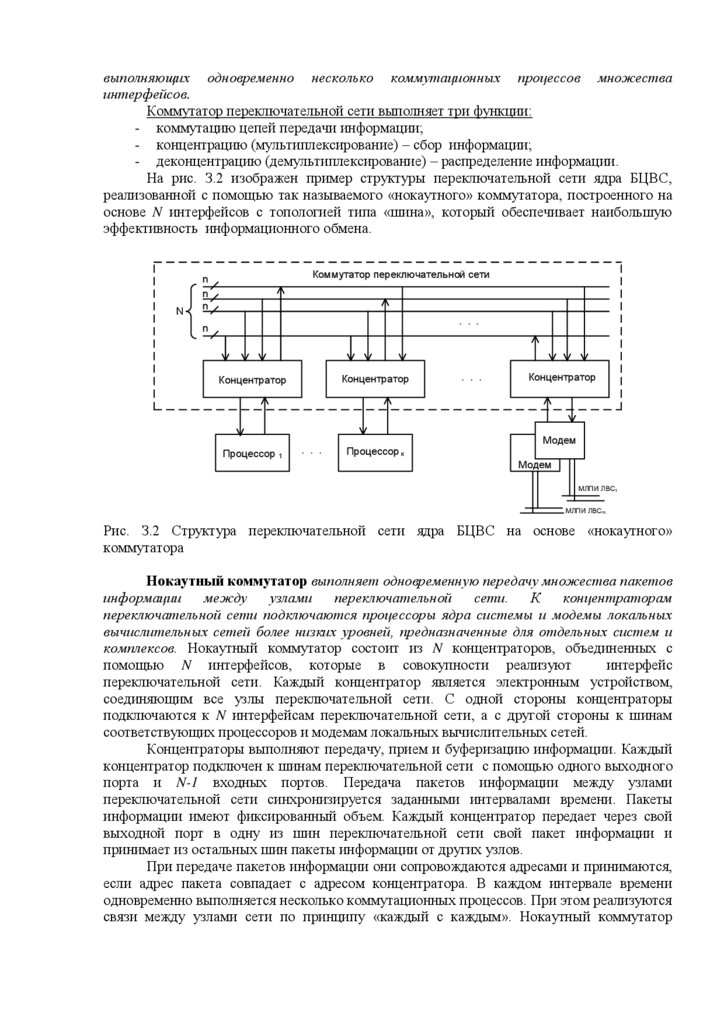
На рис. З.2 изображен пример структуры переключательной сети ядра БЦВС,
реализованной с помощью так называемого «нокаутного» коммутатора, построенного на
основе N интерфейсов с топологией типа «шина», который обеспечивает наибольшую
эффективность информационного обмена.
N
Коммутатор переключательной сети
n
n
n
. . .
n
Концентратор
Концентратор
Процессор 1
. . .
Процессор к
. . .
Концентратор
Модем
Модем
МЛПИ ЛВС1
МЛПИ ЛВСm
Рис. З.2 Структура переключательной сети ядра БЦВС на основе «нокаутного»
коммутатора
Нокаутный коммутатор выполняет одновременную передачу множества пакетов
информации
между
узлами
переключательной
сети.
К
концентраторам
переключательной сети подключаются процессоры ядра системы и модемы локальных
вычислительных сетей более низких уровней, предназначенные для отдельных систем и
комплексов. Нокаутный коммутатор состоит из N концентраторов, объединенных с
помощью N интерфейсов, которые в совокупности реализуют
интерфейс
переключательной сети. Каждый концентратор является электронным устройством,
соединяющим все узлы переключательной сети. С одной стороны концентраторы
подключаются к N интерфейсам переключательной сети, а с другой стороны к шинам
соответствующих процессоров и модемам локальных вычислительных сетей.
Концентраторы выполняют передачу, прием и буферизацию информации. Каждый
концентратор подключен к шинам переключательной сети с помощью одного выходного
порта и N-1 входных портов. Передача пакетов информации между узлами
переключательной сети синхронизируется заданными интервалами времени. Пакеты
информации имеют фиксированный объем. Каждый концентратор передает через свой
выходной порт в одну из шин переключательной сети свой пакет информации и
принимает из остальных шин пакеты информации от других узлов.
При передаче пакетов информации они сопровождаются адресами и принимаются,
если адрес пакета совпадает с адресом концентратора. В каждом интервале времени
одновременно выполняется несколько коммутационных процессов. При этом реализуются
связи между узлами сети по принципу «каждый с каждым». Нокаутный коммутатор
17.
обеспечивает высокую пропускную способность переключательной сети и малыезадержки передачи информации.
Для обеспечения высокого уровня отказоустойчивости и живучести БЦВС
используется резервирование и взаимозаменяемость. Предусматривается, что до 30
процентов оборудования бортовой вычислительной системы должно работать в режиме
горячего резерва.
-Перспективным является дальнейшее развитие технологии высокоскоростных
волоконно-оптических сетей (FC - Fiber Channel -технология). Существующие стандарты
AS4074 (AS4075) предусматривают построение сети с радиальной топологией «звезда» и
маркерным методом доступа с подключением большого числа абонентов при высокой
скорости передачи информации.
- Для сбора информации от датчиков будут продолжать применяться
существующие стандарты на МКИО со скоростями передачи 1 Мбит/c (ГОСТ 26765.5287, MIL STD 1553B) и 20 Мбит/c (ГОСТ Р 50832-95, STANAG 3910), а также
модернизированные варианты этих стандартов для повышения скорости передачи
информации. Для передачи видеоинформации используется стандарт STANAG 3350.
- По мере развития элементной базы имеет место поэтапное развитие БЦВС.
На первом этапе развития предусматривается дальнейшая разработка БЦВС,
построенных по магистрально-модульному принципу с федеративно- централизованным
управлением, при использовании для связи в системе мультиплексных каналов по ГОСТ
26765.52-87 и ГОСТ Р 50832-95 и радиальных каналов по ГОСТ 18977-79. Для
обеспечения независимости от особенностей аппаратуры конкретных типов применяются
стандартные внутрисистемные интерфейсы, например, VME, CPCI.
На втором этапе предусматривается развитие магистрально-модульных БЦВС,
реализуемых в виде локальных вычислительных сетей реального времени, на основе
применения многопроцессорных БЦВМ и системы мультиплексных каналов.
На третьем этапе предусматривается реализация ядра БЦВС в виде
переключательной вычислительной сети.
Указанные направления развития архитектуры обеспечивают следующие
свойства БЦВС:
-
-
эффективность вычислительной системы, то есть способность решать все
необходимые задачи комплекса с высокой точностью
и минимальными
временными задержками;
открытость системы, которая позволяет наращивать вычислительную
систему программными и аппаратными средствами;
масштабируемость системы, то есть способность применять систему для
комплексов с различным объемом бортового оборудования;
интегрированность системы, которая обеспечивает оптимальную комплексную
обработку всей имеющейся информации;
использование относительно небольшого числа связей;
отказоустойчивость и живучесть;
автоматизацию контроля и технической эксплуатации, как самой системы, так
и комплекса в целом;
стандартизацию аппаратуры и программного обеспечения,
устойчивость к смене поколений средств вычислительной техники;
снижение сроков проектирования и модернизации системы;
снижение темпа роста стоимости при развитии системы.
18.
3.Развитие программного обеспечения.Три направления развития:
- обеспечение модульности;
- повышение надежности;
- повышение независимости от аппаратных средств БЦВС.
Модульность программного обеспечения является свойством, при котором
изменение отдельных частей программного обеспечения не приводит к необходимости
изменения других его частей. Модульность ускоряет разработку программного
обеспечения и сокращение сроков его модернизации.
По мере усложнения программного обеспечения все большее значение приобретает
проблема обеспечения его надежности.
Повышение надежности программного
обеспечения достигается за счет повышения уровня автоматизации его разработки,
отладки и испытаний.
Для обеспечения как можно большей независимости от видов бортового
оборудования применяются сертифицированные операционные системы реального
времени.
Концепция модернизации бортовых вычислительных систем
- Важным направлением развития БЦВС является модернизация бортового
оборудования летательных аппаратов. Срок службы ЛА 3,4 поколений составляет 30-40
лет и более. Поэтому замена морально устаревшего бортового оборудования является
экономически оправданной. Модернизация комплекса на порядок дешевле разработки
нового комплекса, а основой комплекса является бортовая вычислительная система.
Проблема модернизации имеет место и для вновь разрабатываемых комплексов, так как в
силу сокращения сроков морального старения часто требуется пересмотр состава
бортового оборудования в процессе проектирования.
- Модернизация БЦВС выполняется при дополнении БЦВС так называемой
управляющей вычислительной системой верхнего уровня УВСВУ, которая, по сути,
является новым ядром вычислительной системы. При этом состав бортового
оборудования дополняется новыми системами, а имеющиеся датчики и приемники
информации и средства вычислительной техники нижнего уровня по возможности
сохраняются.
В состав УВСВУ входят:
- несколько высокопроизводительных БЦВМ, предназначенных для решения задач
навигации, управления, контроля и отображения информации;
- цветные жидкокристаллические многофункциональные индикаторы МФИ с
кнопочным обрамлением;
- многофункциональный пульт управления МФПУ с экраном и кнопочным
обрамлением;
- блоки УВВ для сопряжения аналоговых датчиков и приемников информации со
стандартными интерфейсами БЦВС;
- блоки разовых команд для сопряжения источников и приемников разовых команд
со стандартными интерфейсами БЦВС.
На основе УВСВУ
радикально изменяется облик информационноуправляющего поля кабины и качественно повышается уровень автоматизации
управления и эксплуатации летательного аппарата.
- При модернизации комплексов самолетов третьего поколения на нижнем уровне
БЦВС сохраняются имеющиеся цифровые каналы РКИО и МКИО и частично
сохраняются аналоговые каналы передачи информации.
- Для подключения датчиков используются дополнительные блоки УВВ и блоки
разовых команд, которые выполняют функции центров коммутации и преобразования
информации в вид, необходимый для передачи по МКИО и РКИО. Сопряжение отдельных
БЦВМ в вычислительную систему верхнего уровня выполняется с помощью нескольких
мультиплексных каналов по ГОСТ 26765.52-87 и ГОСТ Р 50832-95. Модернизация
БЦВС позволяет радикально повысить эффективность комплексов бортового
оборудования при умеренных затратах.