






































 Механика
МеханикаПохожие презентации:
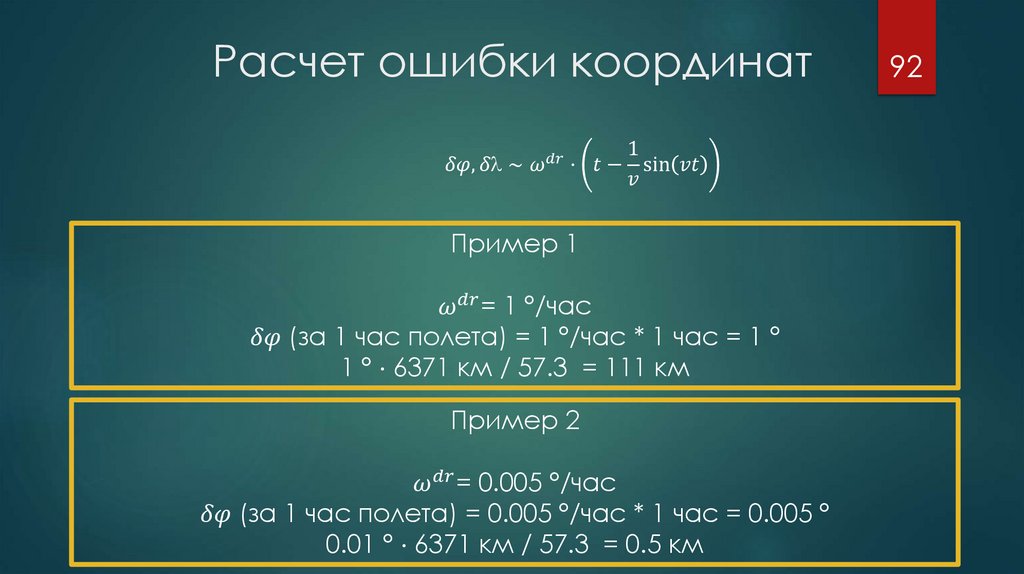
")









Инерциальная навигация Inertial navigation
1.
ООО «Интеграл»Навигационные решения для любых задач
Инерциальная навигация
Inertial navigation
Пазычев Дмитрий Борисович
старший преподаватель МГТУ им. Н. Э. Баумана,
кафедра ИУ-11
главный конструктор ООО «Интеграл»
dpazychev@mail.ru
+7-903-205-00-45
1
2.
Навигация в древние времена2
3.
Навигация в современное время3
4.
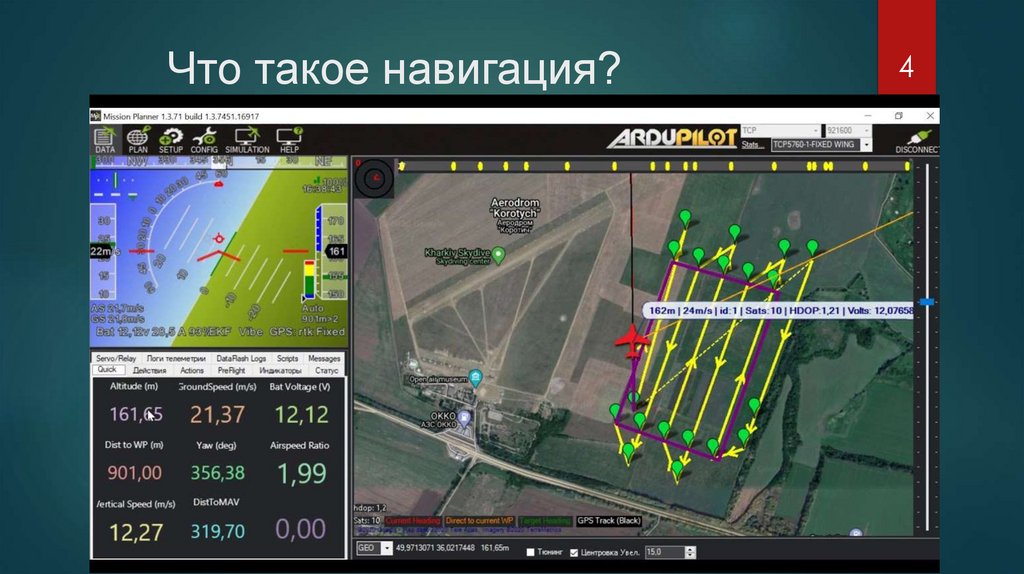
Что такое навигация?4
5.
Системы навигации5
Системы навигации в
помещении
Системы навигации на
улице
(Indoor navigation systems)
(Outdoor navigation systems)
6.
Географические координатыGeographical coordinates
6
Широта (Latitude) = [-90°…+90°]
Долгота (Longitude) = [-180°…+180°]
Высота (Altitude, Height) = [-500м…+40000 м]
7.
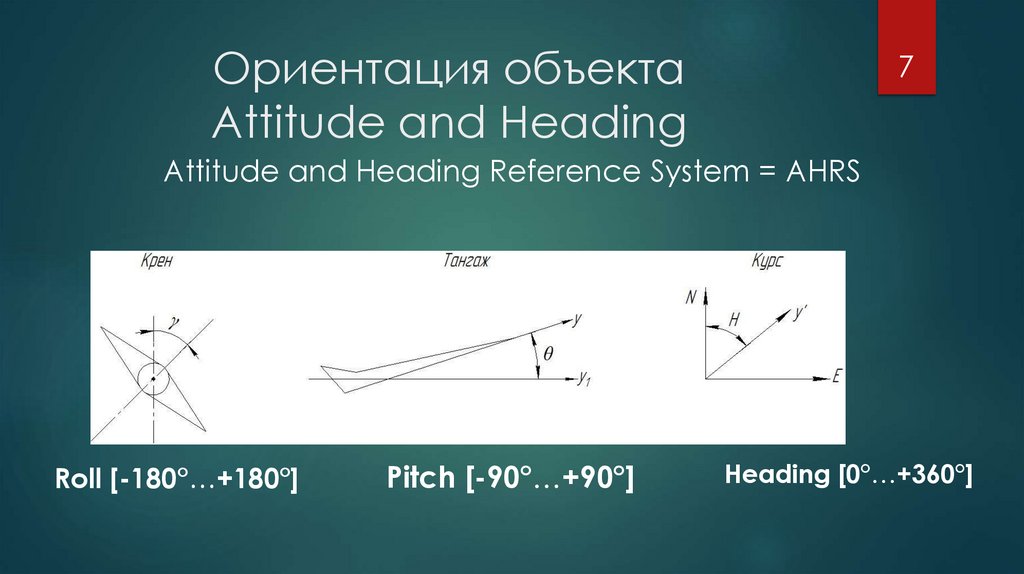
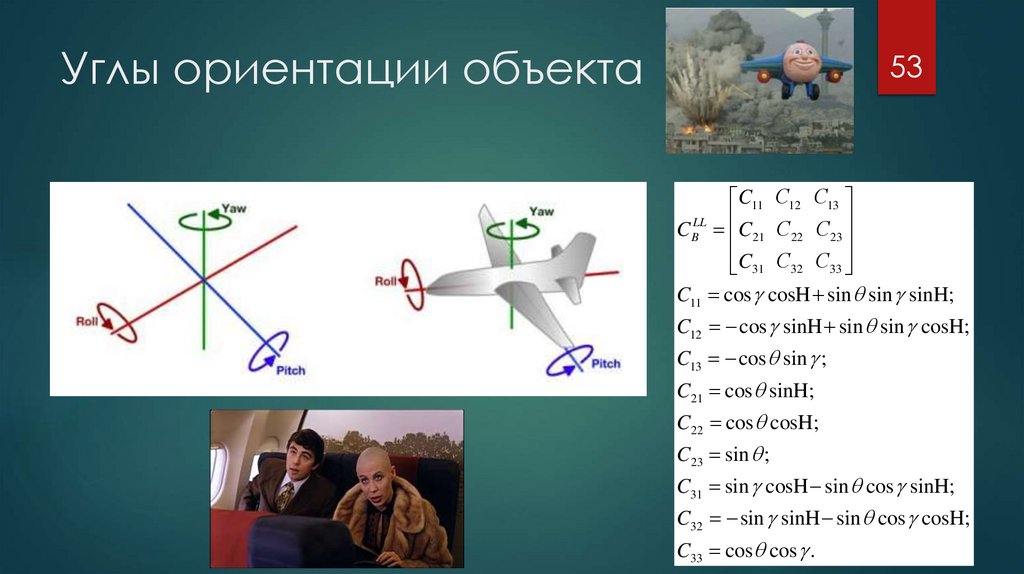
Ориентация объектаAttitude and Heading
7
Attitude and Heading Reference System = AHRS
Roll [-180°…+180°]
Pitch [-90°…+90°]
Heading [0°…+360°]
8.
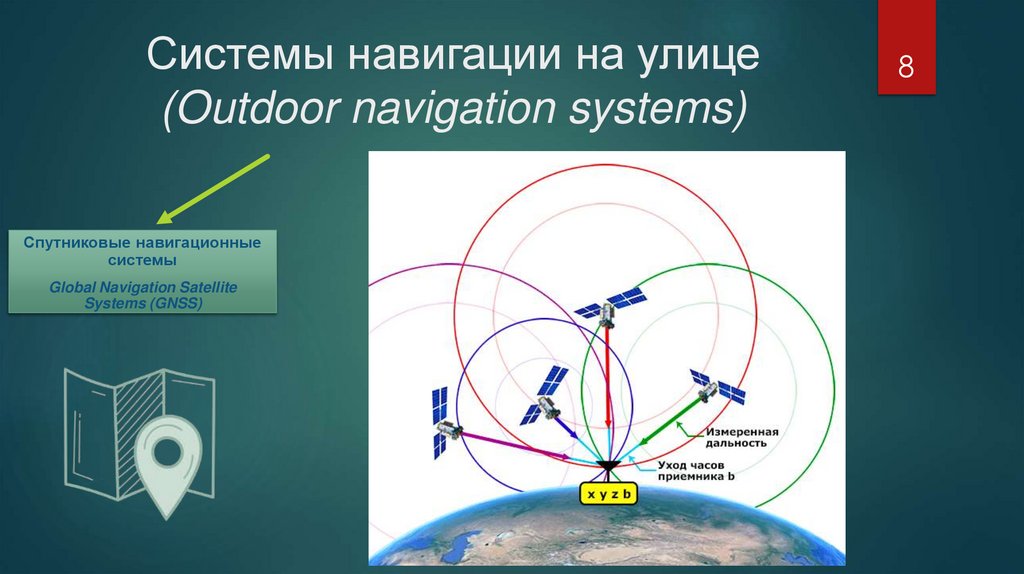
Системы навигации на улице(Outdoor navigation systems)
Спутниковые навигационные
системы
Global Navigation Satellite
Systems (GNSS)
8
9.
Системы навигации на улице(Outdoor navigation systems)
Рассчитывают данные на основании
сигналов от спутников
Рассчитывают ориентацию объекта
(специальные версии приемников)
НЕ накапливают ошибку расчета в
процессе работы, но теряют все
решение при потере спутников
Спутниковые навигационные
системы
Global Navigation Satellite
Systems (GNSS)
9
10.
1011.
11Способы борьбы с СНС
сигналом
GNSS jamming
GNSS spoofing
12.
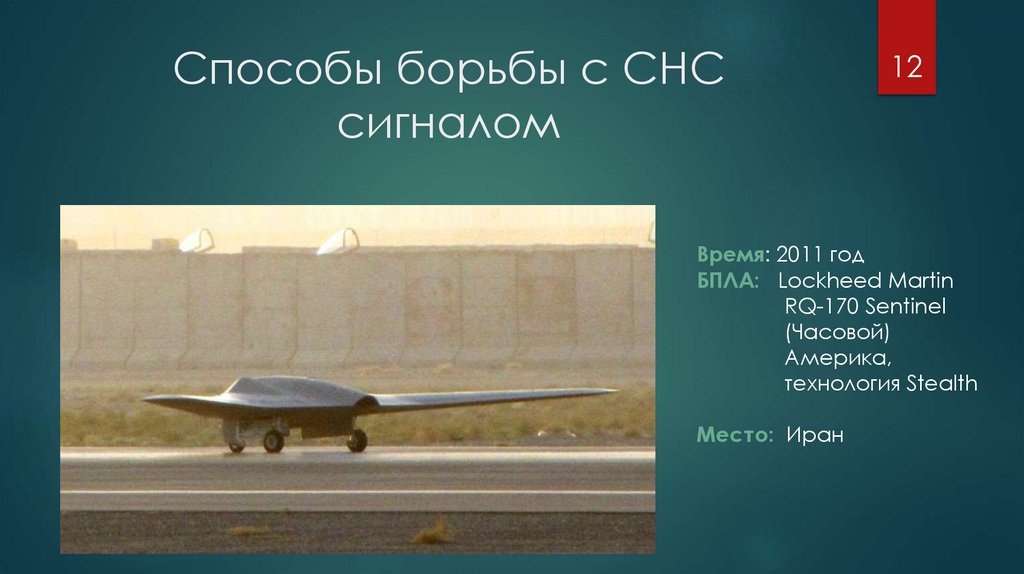
Способы борьбы с СНСсигналом
12
Время: 2011 год
БПЛА: Lockheed Martin
RQ-170 Sentinel
(Часовой)
Америка,
технология Stealth
Место: Иран
13.
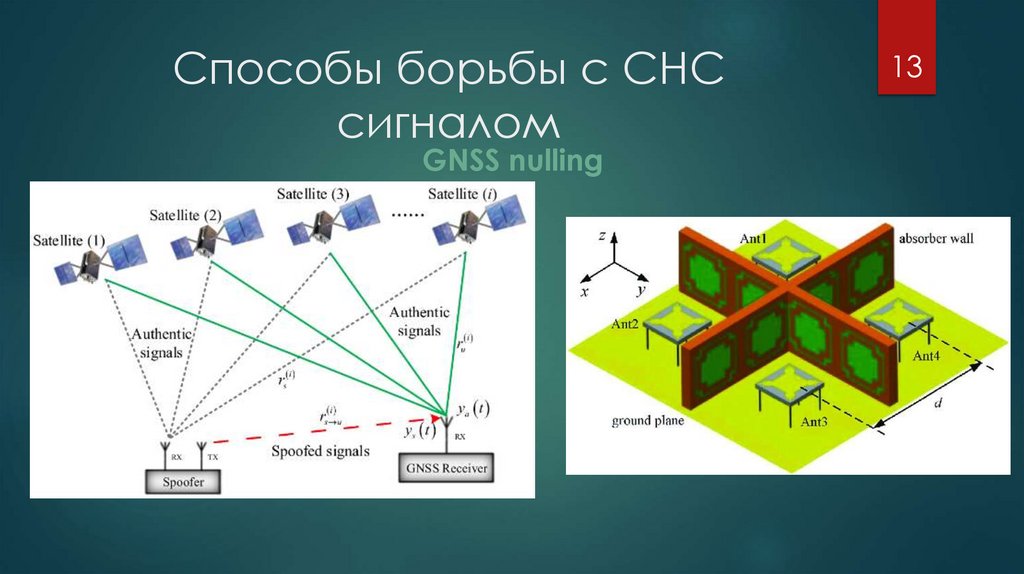
Способы борьбы с СНСсигналом
GNSS nulling
13
14.
Системы навигации на улице(Outdoor navigation systems)
Инерциальные
навигационные системы
Inertial navigation systems
(INS)
14
Рассчитывают данные на
основании сигналов со
специальных датчиков,
расположенных на объекте
Рассчитывают ориентацию
объекта
Накапливают ошибку
расчета в процессе
работы
15.
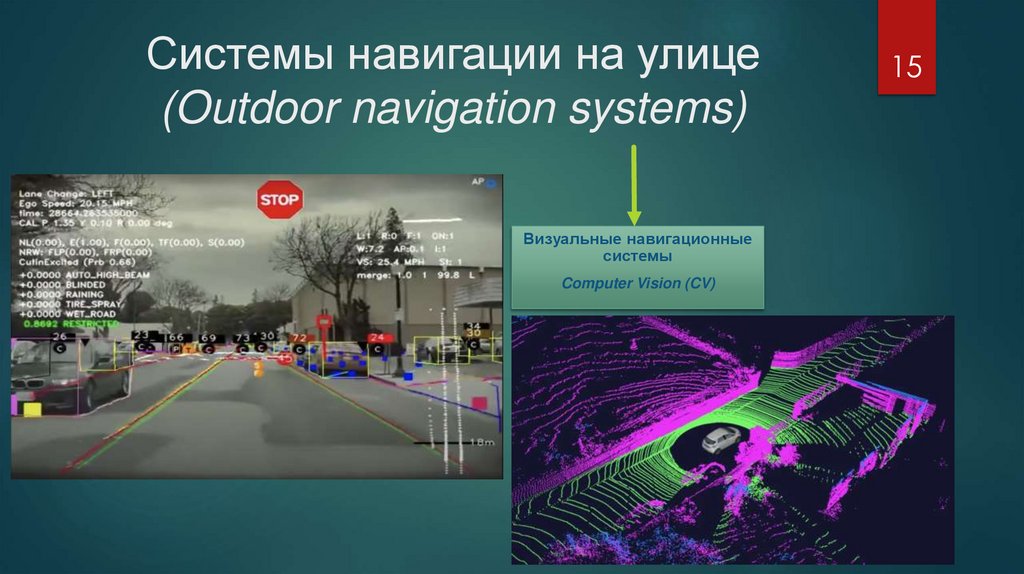
Системы навигации на улице(Outdoor navigation systems)
Визуальные навигационные
системы
Computer Vision (CV)
15
16.
Системы навигации на улице(Outdoor navigation systems)
Рассчитывают данные на
основании сигналов с
камер и лидаров
Рассчитывают
относительную
ориентацию объекта
Требуют серьезных
вычислительных
мощностей
Визуальные навигационные
системы
Computer Vision (CV)
16
17.
Системы навигации на улице(Outdoor navigation systems)
Рассчитывают данные на основании
сигналов с астрономических визиров,
наблюдающих свечение звезд
Рассчитывают ориентацию объекта
Обладают большими габаритами и
массой
Требуют наблюдения звезд
17
Астрономические
навигационные системы
Celestial navigation system
(CNS)
18.
Системы навигации на улице(Outdoor navigation systems)
Инерциальные
навигационные системы
Inertial navigation systems
(INS)
Рассчитывают данные на
основании сигналов от
спутников
Рассчитывают
ориентацию объекта
(специальные версии
приемников)
НЕ накапливают ошибку
расчета в процессе
работы, но теряют все
решение при потере
спутников
18
Спутниковые
навигационные системы
Визуальные навигационные
системы
Астрономические
навигационные системы
Global Navigation Satellite
Systems (GNSS)
Computer Vision (CV)
Celestial navigation system
(CNS)
Рассчитывают данные на
основании сигналов со
специальных датчиков,
расположенных на
объекте
Рассчитывают данные на
основании сигналов с
камер и лидаров
Рассчитывают
ориентацию объекта
Накапливают ошибку
расчета в процессе
работы
Рассчитывают
ориентацию объекта
Требуют серьезных
вычислительных
мощностей
Рассчитывают данные
на основании сигналов
с астрономических
визиров, наблюдающих
свечение звезд
Рассчитывают
ориентацию объекта
Обладают большими
габаритами и массой
Требуют наблюдения
звезд
19.
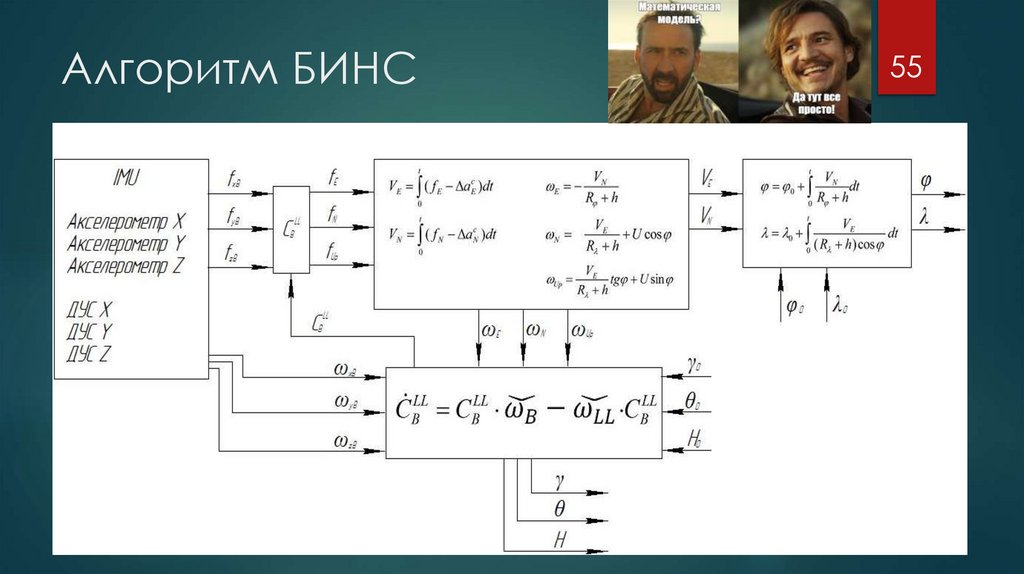
Инерциальные навигационные системы 19(INS, Gimbal INS)
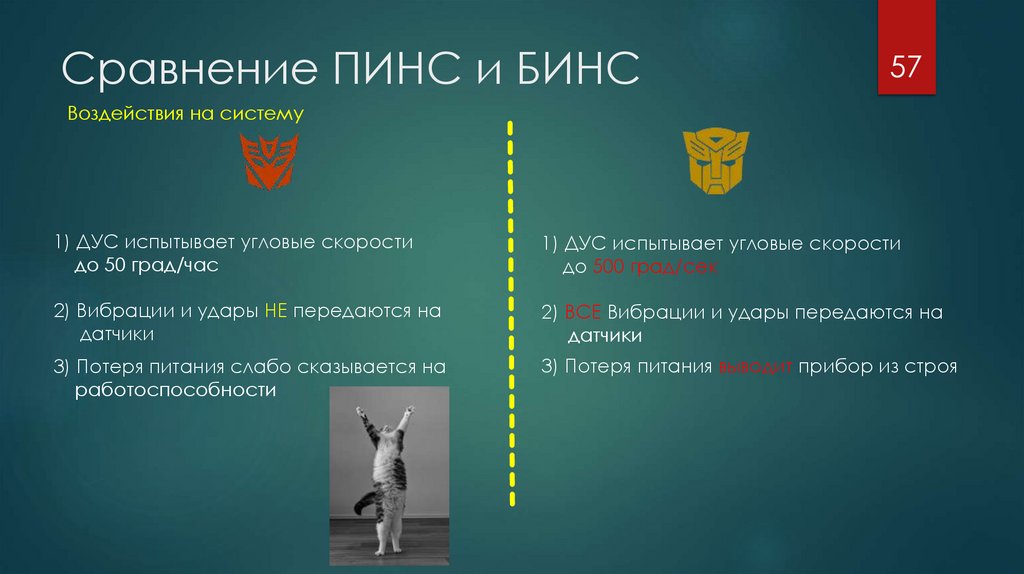
Бесплатформенные
ИНС
(Strapdowm INS =
SINS)
10% рынка
90% рынка
Платформенные
ИНС
20.
Классы систем навигации дляБПЛА
Грубые
Средняя точность
(Low Cost)
(Medium Accuracy)
• MEMS гироскоп
(1… 200 град/час)
• MEMS
акселерометр
(более 0.01
м/с/с)
• Ошибка
навигации 500 м/
5 мин
• ВОГ (Fiber Optic
Gyroscope = FOG)
гироскоп
(0.01…1 град/час)
• MEMS или
кварцевый (Quartz)
акселерометр
(0.0001… 0.01
м/с/с)
• Ошибка навигации
3,5 км / 1 час
20
Высокая точность
(High Performance)
• Лазерный (Ring Laser
Gyroscope = RLG)
гироскоп
(0.001…0.01 град/час)
• Кварцевый (Quartz)
акселерометр
(0.00001… 0.00001
м/с/с)
• Ошибка навигации
< 1,0 км / 1 час
21.
Классы систем навигации дляБПЛА
Ультравысокая точность
(Ultra High Performance)
• Поплавковый гироскоп
(0.0001 град/час и точнее)
• Кварцевый (Quartz) или
поплавковый акселерометр
(0.0000001 м/с/с и точнее)
• Ошибка навигации 50 - 100м / 1
час
21
22.
Классы систем навигации дляБПЛА
Грубые
(Low Cost)
Средняя точность
(Medium Accuracy)
22
Высокая точность
(High Performance)
23.
Классы систем навигации дляБПЛА
Ультра высокая точность
(Ultra high performance)
23
24.
Навигационные датчики24
Датчик угловой
скорости
Акселерометр
Gyroscope
Accelerometer
25.
Датчик угловой скоростиGyroscope
25
26.
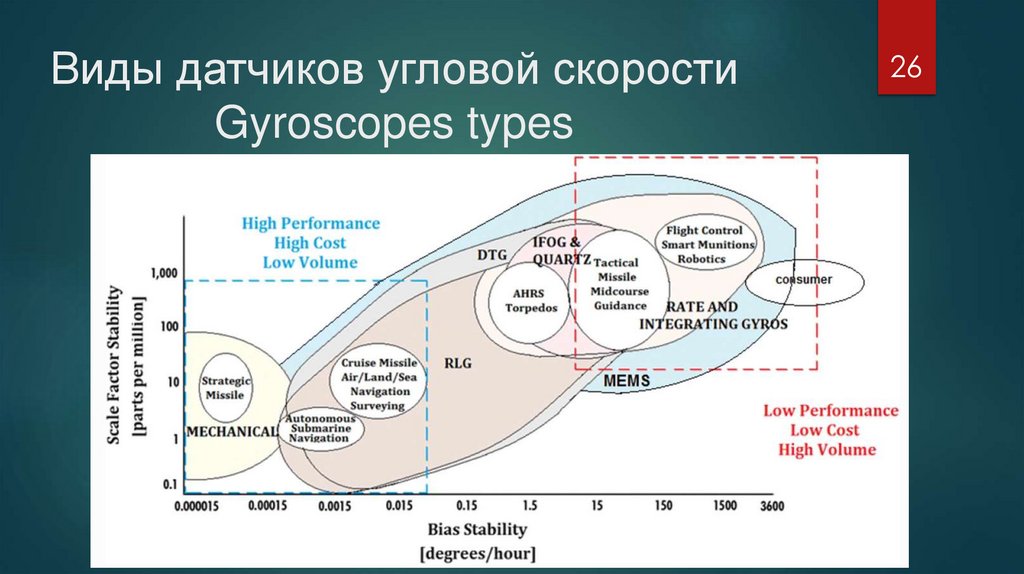
Виды датчиков угловой скоростиGyroscopes types
26
27.
Механический датчик угловойскорости
Mechanical gyroscope
27
28.
Лазерный датчик угловой скоростиRing laser gyroscope (RLG)
28
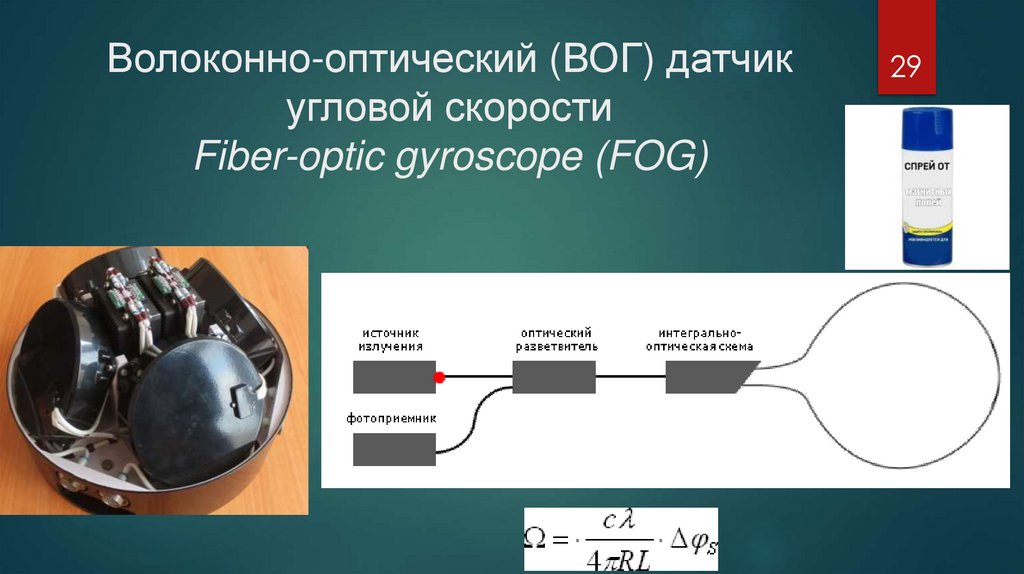
29.
Волоконно-оптический (ВОГ) датчикугловой скорости
Fiber-optic gyroscope (FOG)
29
30.
Микроэлектромеханичеcкий датчик угловой скорости 30Micro-Electro-Mechanical Systems (MEMS) Gyroscope
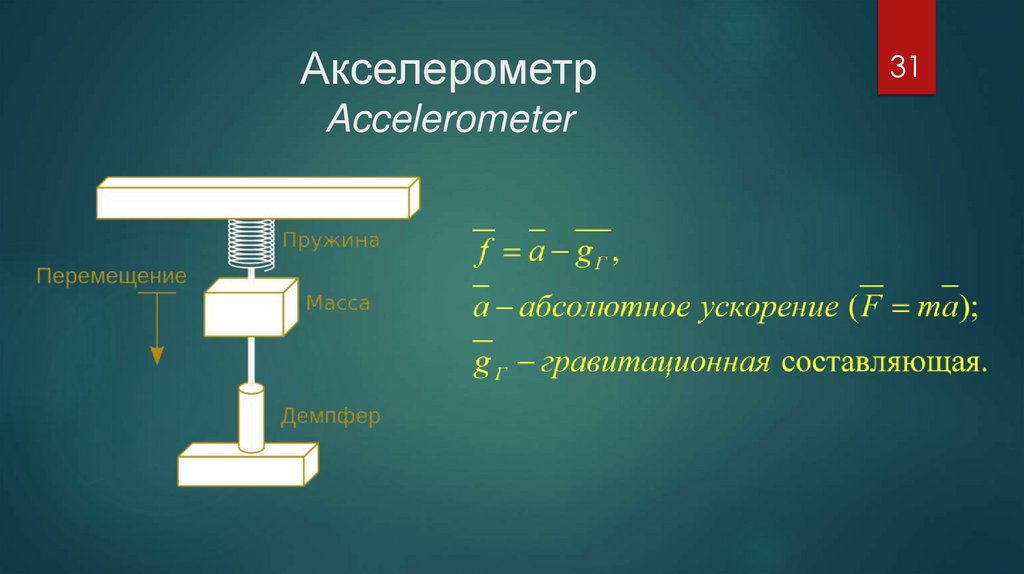
31.
АкселерометрAccelerometer
31
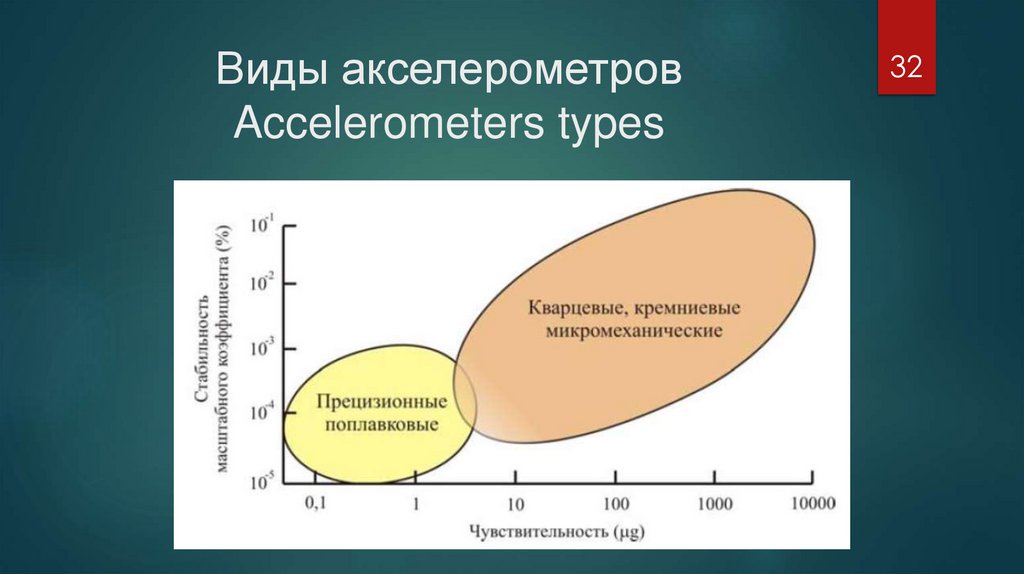
32.
Виды акселерометровAccelerometers types
32
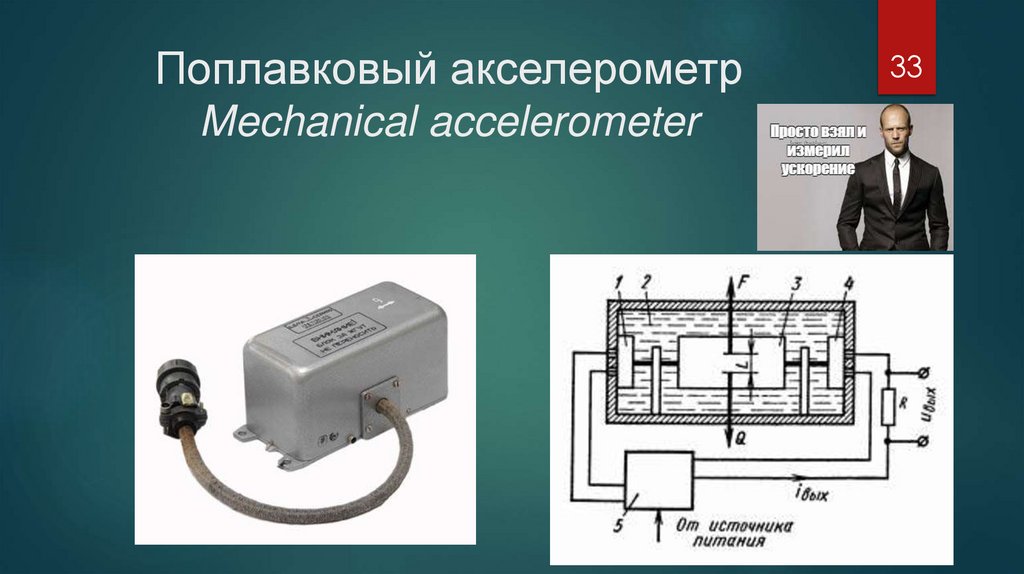
33.
Поплавковый акселерометрMechanical accelerometer
33
34.
Кварцевый акселерометрQuartz accelerometer
34
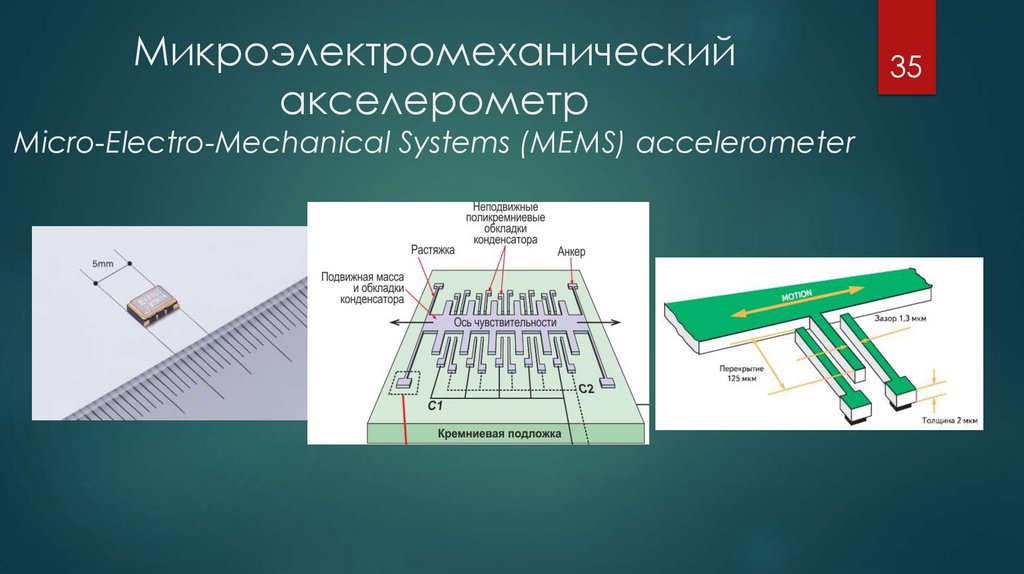
35.
Микроэлектромеханичеcкийакселерометр
Micro-Electro-Mechanical Systems (MEMS) accelerometer
35
36.
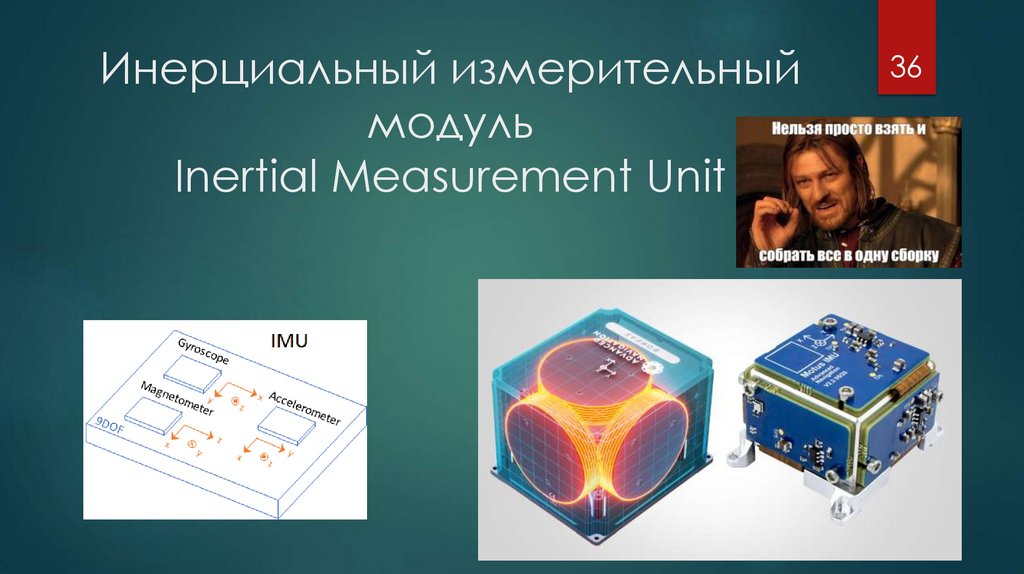
Инерциальный измерительныймодуль
Inertial Measurement Unit
36
37.
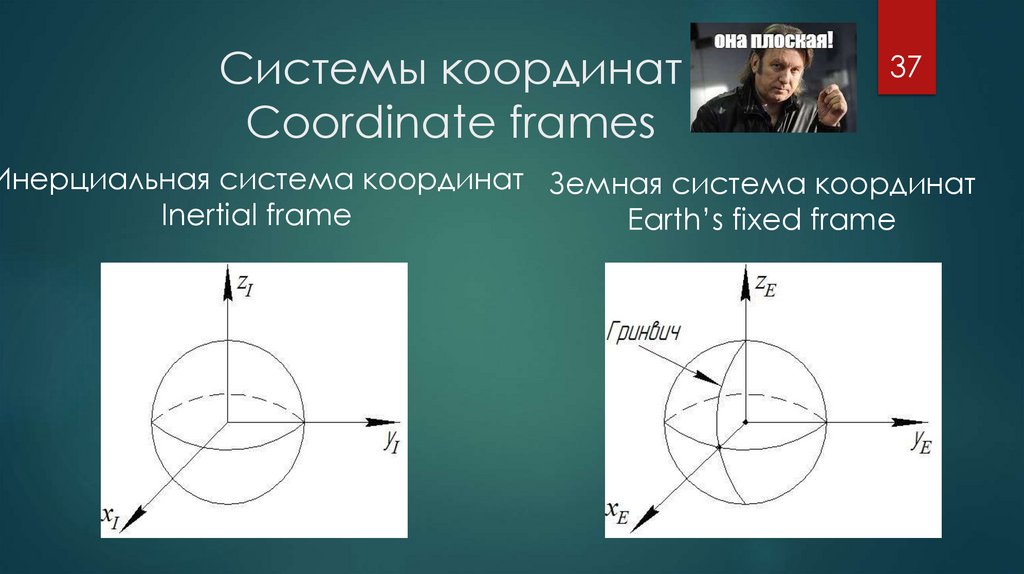
Системы координатCoordinate frames
37
Инерциальная система координат Земная система координат
Inertial frame
Earth’s fixed frame
38.
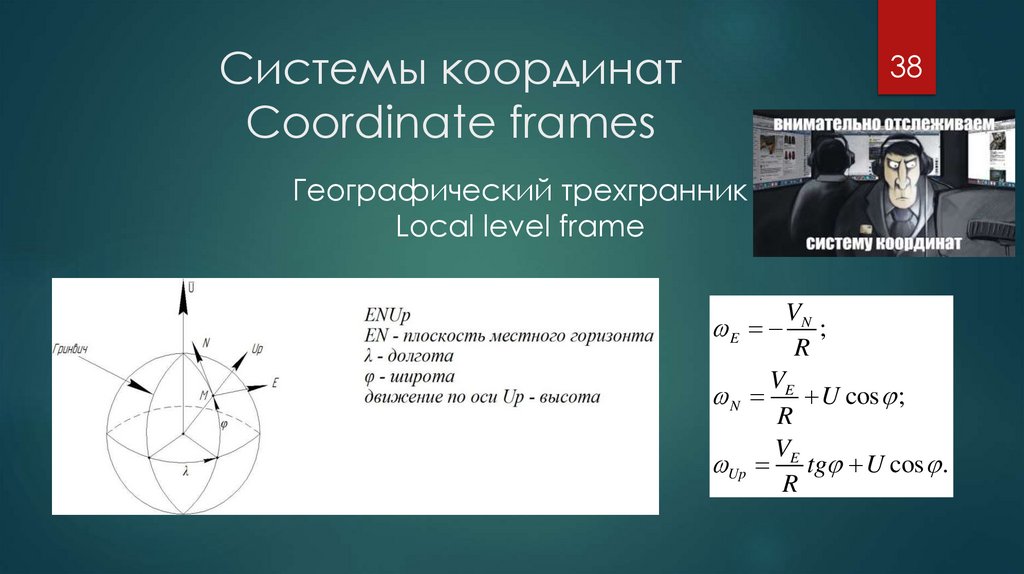
Системы координатCoordinate frames
38
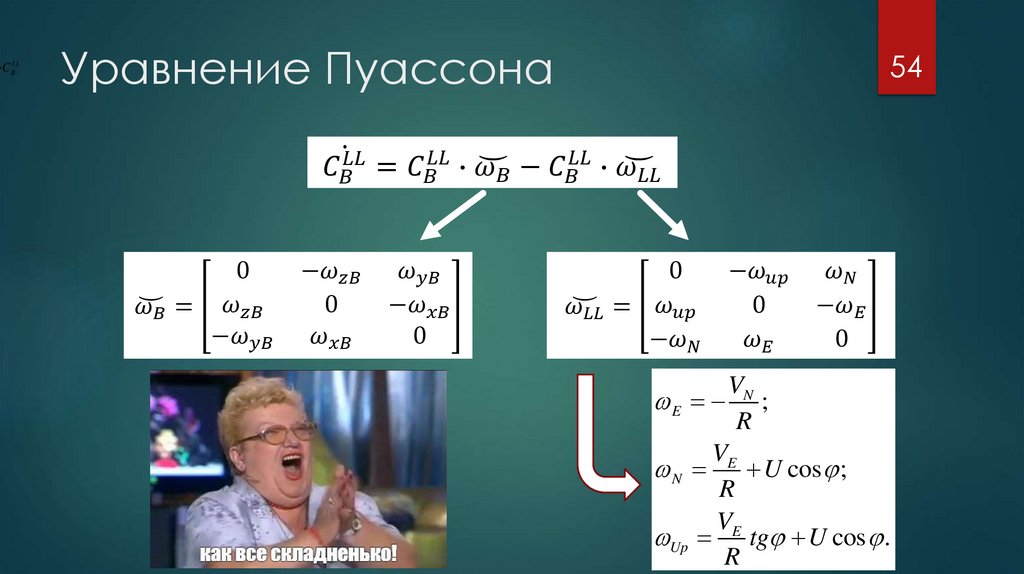
Географический трехгранник
Local level frame
V
R
E N ;
VE
U cos ;
R
VE
Up tg U cos .
R
N
39.
Системы координатCoordinate frames
Полусвободная в азимуте
система координат
Wander frame
VE
tg
R
39
40.
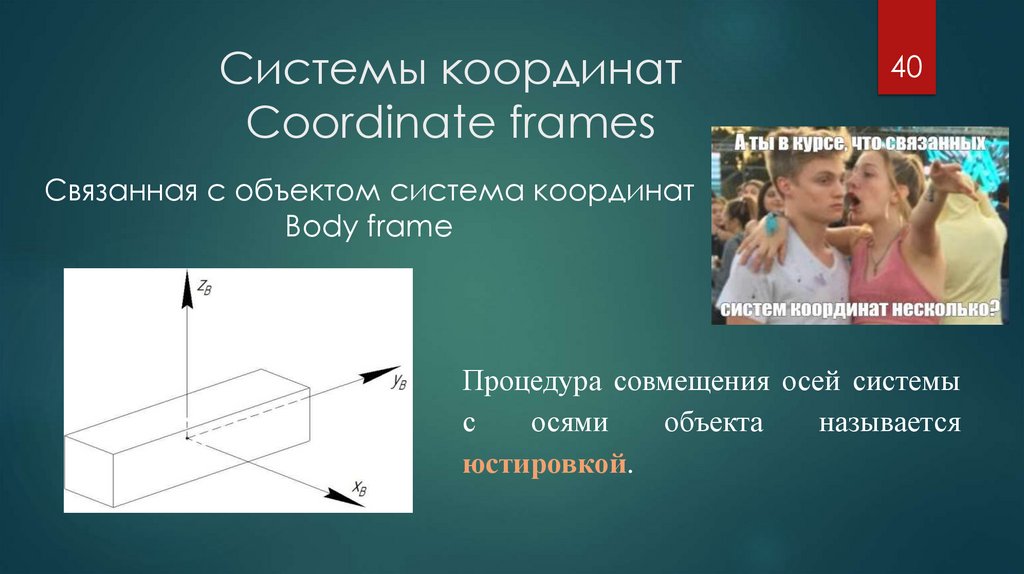
Системы координатCoordinate frames
40
Связанная с объектом система координат
Body frame
Процедура совмещения осей системы
с
осями
объекта
называется
юстировкой.
41.
Системы координатCoordinate frames
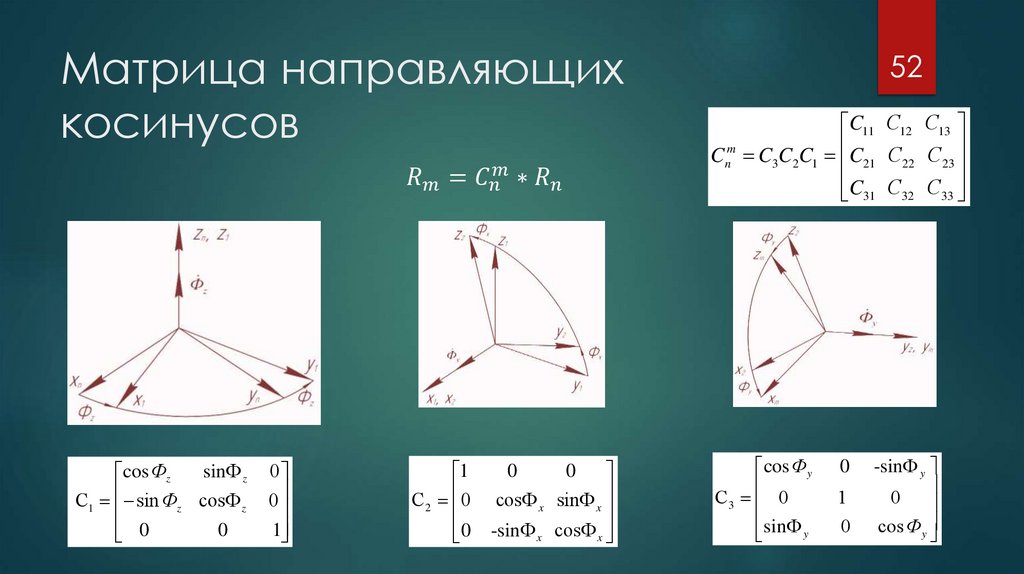
Платформенная система координат
Platform frame
1
x
y Ф
Z
z PL ФY
Смоделированная
Система координат
ФZ
1
ФX
матрица
перехода
ФY x
ФX y
1 z LL
идеальная СК
41
42.
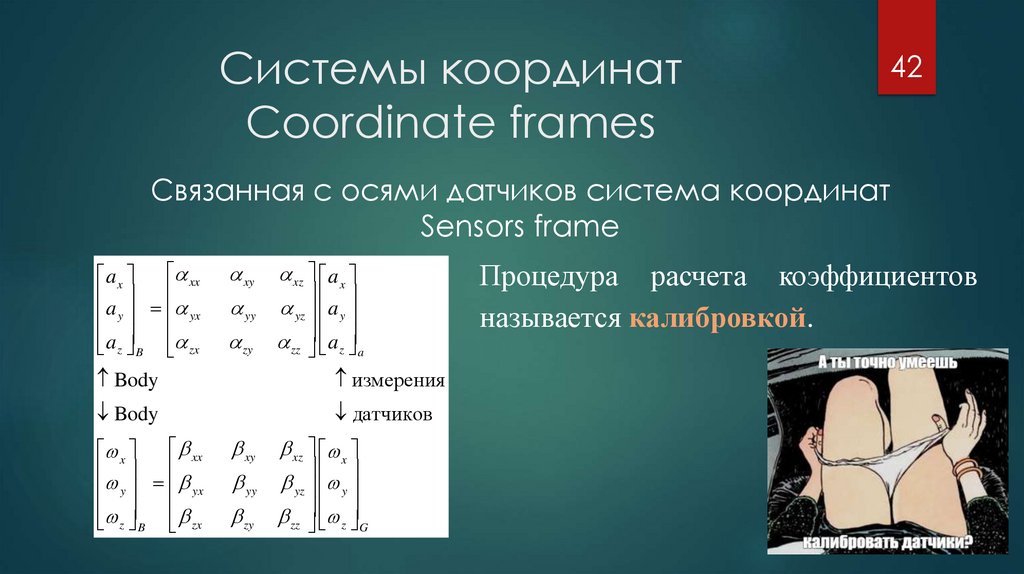
Системы координатCoordinate frames
42
Связанная с осями датчиков система координат
Sensors frame
xx
ax
a
yx
y
a
z B zx
xy
yy
zy
xz a x
yz a y
zz az a
Body
измерения
Body
датчиков
xx
x
yx
y
z B zx
xy
xz x
yy
yz y
zy
zz z G
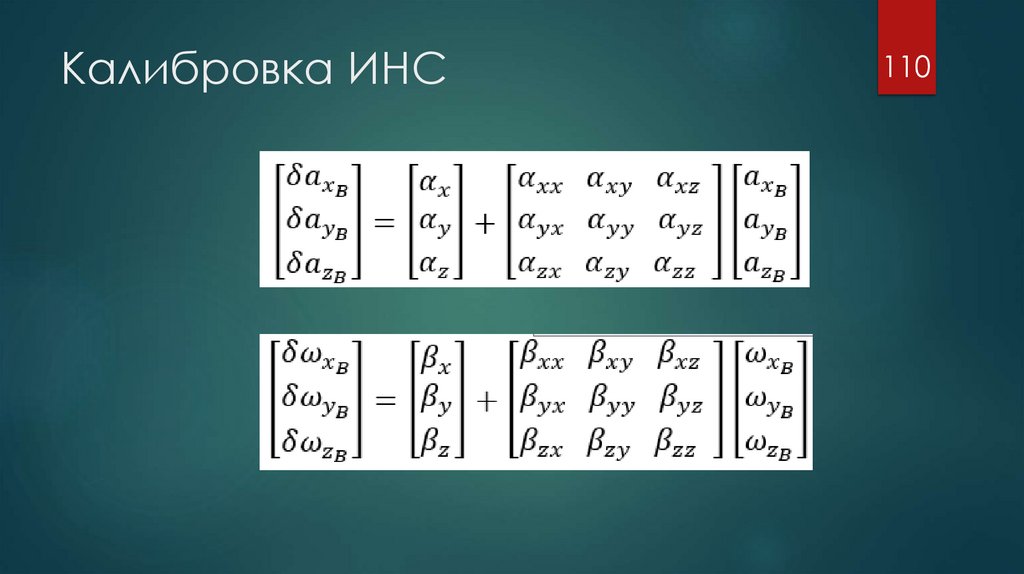
Процедура расчета коэффициентов
называется калибровкой.