


 - на основе DGPS")













 Механика
Механика Электроника
ЭлектроникаПохожие презентации:


. Блок ввода-вывода (SIOC)")


")


")

Тема 3. Датчики управления и позиционирования БПЛА. Занятие 3. Глобальная система позиционирования
1. Старший преподаватель: майор Кутузов Андрей Станиславович
Цикл: Подготовки специалистов на комплексы с беспилотнымилетательными аппаратами средней дальности и
большой продолжительности полета.
Дисциплина: Конструкция и эксплуатация комплекса с БПЛА
средней дальности «Форпост».
Тема 3.
Датчики управления и
позиционирования БПЛА.
Занятие 3.
Глобальная система позиционирования,
ответчик государственного опознавания.
Старший преподаватель: майор Кутузов Андрей Станиславович
2.
Цели занятияОписать порядок определения координат
GPS/ГЛОНАСС.
Перечислить состав и принцип работы
бортового сегмента системы
GPS/ГЛОНАСС.
Назначении и составе ответчика ГО.
3.
Вопрос 1. Бортовой комплект системынавигации GPS.
Вопрос 2. Бортовой комплект системы
навигации ГЛОНАСС.
Вопрос 3. Ответчик государственного
опознавания.
4.
Вопрос 1.Бортовой комплект системы
навигации GPS.
5.
Бортовой комплект системы навигации GPS.5
Система глобального
позиционирования GPS
представляет собой навигационную
систему, состоящую из сети
спутников, расположенных в
космосе, и приемника,
установленного на БПЛА
6. Принцип определения координат GPS
6Y
Таким образом
получаем координату
текущего
местоположения
объекта X иY.
Для получения
третей координаты Z
(высоты) необходим
сигнал четвертого
спутника.
X
7.
Бортовой комплект системы навигации GPS.7
Каждый из спутников передает сигналы:
1) своего положения в любой момент
времени;
2) данные орбиты спутниковой сети;
3) синхронизированное время.
8.
Бортовой комплект системы навигации GPS.Система GPS БПЛА состоит:
2 антенны,
2 разветвителя,
плата приемника-вычислителя
GPS (в MCPA),
комплект соединяющих кабелей
8
9.
Бортовой комплект системы навигации GPS.2 Антенны GPS/
ГЛОНАСС
2 Разветвителя
GPS
Плата
GPS в
MCPA
9
10.
Бортовой комплект системы навигации GPS.10
Приемник (в составе GPS платы)
принимает РЧ-сигналы от
спутников (максимум - 12
спутников) через антенну, выбирает
четыре лучших принятых сигнала,
преобразует РЧ в ПЧ и распознает
полученные данные.
11.
Бортовой комплект системы навигации GPS.11
Вычислитель GPS-приемника
вычисляет координату, высоту и
путевую скорость и направляет эти
данные в вычислитель FCC (MCPA).
Решение расчета текущего
положения БПЛА направляется по
каналу DNL к наземным станциям.
12.
Бортовой комплект системы навигации GPS.12
Дифференциальная глобальная
система позиционирования (DGPS)
построена на основе системы
глобального позиционирования GPS.
13.
Бортовой комплект системы навигации GPS.13
Дифференциальная глобальная
система позиционирования (DGPS)
используется системой для
содействия в уточнении данных
текущего положения на основе
данных системы GPS с вводом
наземной секции.
14.
Бортовой комплект системы навигации GPS.14
Система DGPS состоит из:
бортовой секции (на БПЛА)
наземной секций (в УНСУ).
15.
Бортовой комплект системы навигации GPS.15
Наземная секция получает от
внутреннего пилота точные данные
положения (через меню станции) и
одновременно вычисляет ее текущее
положение по данным, полученным от
спутников.
16.
Бортовой комплект системы навигации GPS.16
Разность между данными,
измеренными спутниками, и
данными текущего положения,
введенными вручную (которые
считаются более точными),
используется в качестве
поправки смещения – Δх, Δy Δh.
17.
Бортовой комплект системы навигации GPS.Этот параметр поправки
местоположения Δх, Δy, Δh
определяется автоматически
системой без участия оператора,
затем передается в БПЛА по
каналу UPL в MCPA.
17
18.
Бортовой комплект системы навигации GPS.18
MCPA к измеренному значению
параметра координаты и высоты БПЛА
X,Y,Z прибавляет поправку смещения
Δх, Δy, Δh , полученные от УНСУ, и
корректирует местоположение БПЛА.
19. Система автоматического взлета и посадки (ATOL) - на основе DGPS
19UPL
Поправка
местоположения
Определение точного
местоположения
БПЛА
БЛА производит
корректировку своего
местоположения
20.
Вопрос 2.Глобальная система
позиционирования
ГЛОНАСС.
21.
21Система НАП ГНСС ГЛОНАСС/GPS
предназначена для
определения географических
координат БПЛА и обеспечение
системы управления БПЛА
высокоточными навигационными
решениями.
22.
22Разветвитель
(сплиттер)
Антенны GPS/
ГЛОНАСС
Модуль
ГЛНС
23.
23Модуль навигационного приема
сигналов СНС ГЛОНАСС/GPS
является бортовым оборудованием и
устанавливается на БПЛА.
Основная функция модуля –
определение координат БПЛА с учетом
дифференциальных поправок.
24.
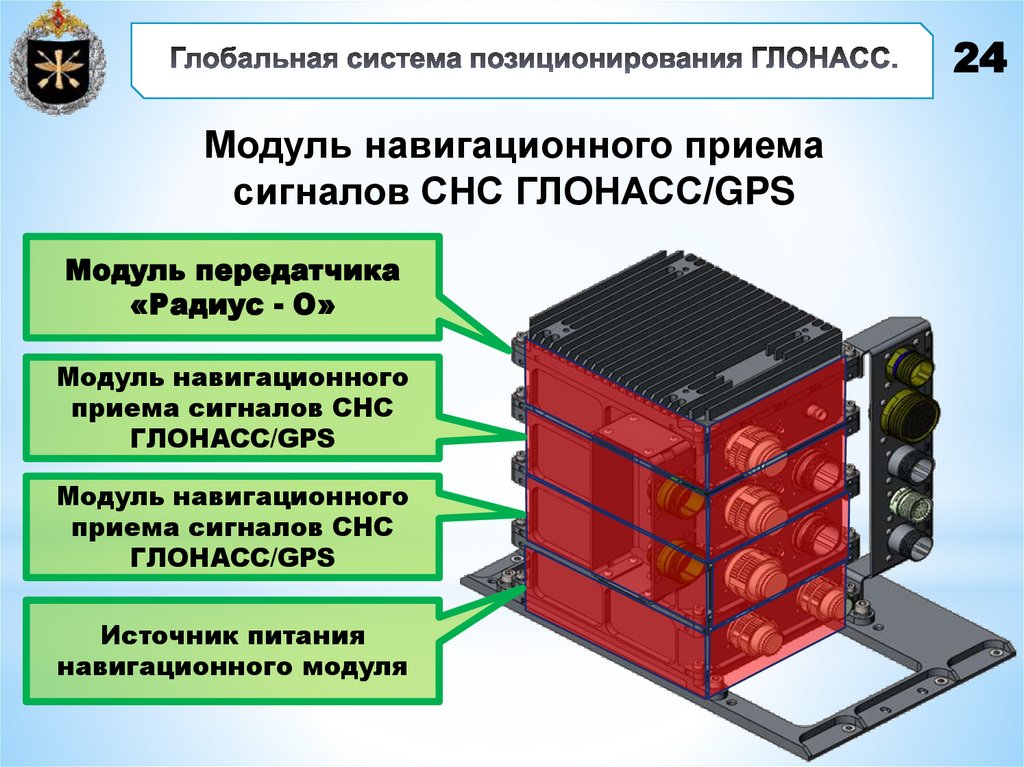
24Модуль навигационного приема
сигналов СНС ГЛОНАСС/GPS
Модуль передатчика
«Радиус - О»
Модуль навигационного
приема сигналов СНС
ГЛОНАСС/GPS
Модуль навигационного
приема сигналов СНС
ГЛОНАСС/GPS
Источник питания
навигационного модуля
25.
2526.
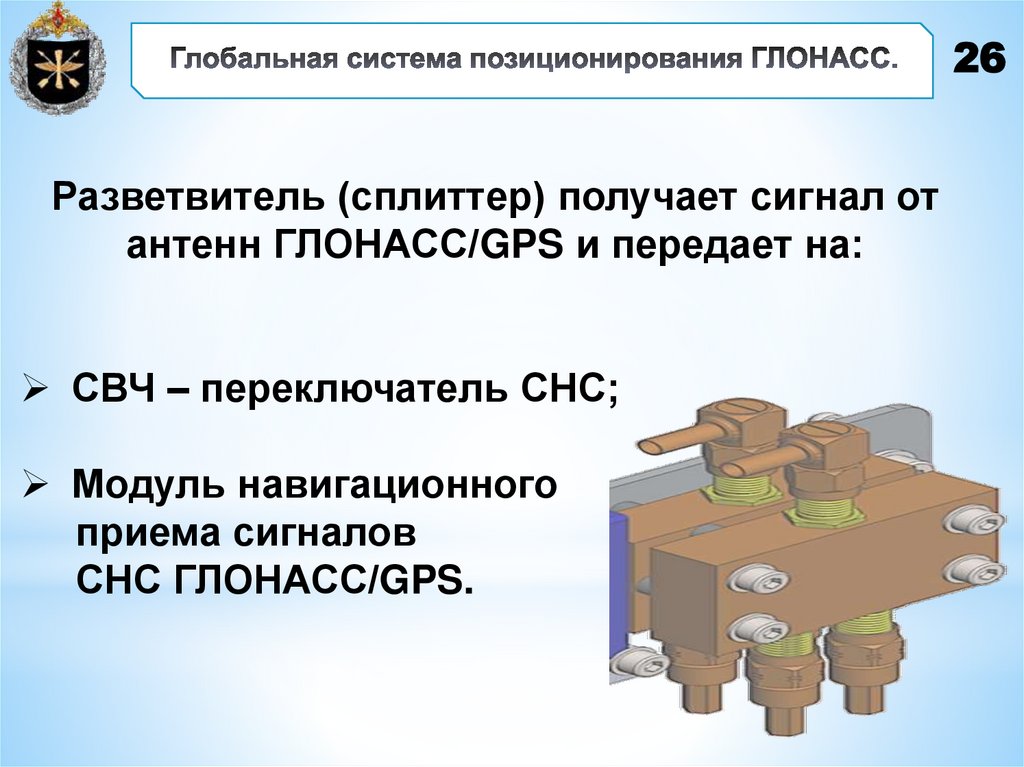
26Разветвитель (сплиттер) получает сигнал от
антенн ГЛОНАСС/GPS и передает на:
СВЧ – переключатель СНС;
Модуль навигационного
приема сигналов
СНС ГЛОНАСС/GPS.
27.
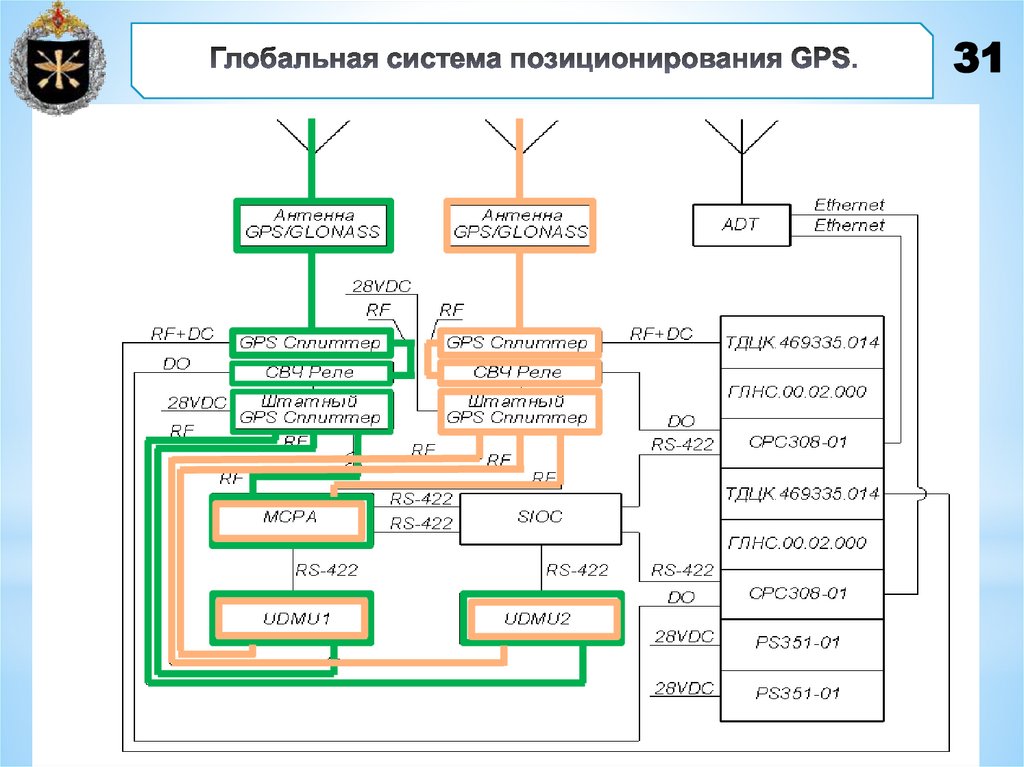
2728.
28СВЧ – переключатель позволяет
отключать по СВЧ тракту
бортовые потребители
(MCPA, UDMU1, UDMU2) сигналов
GPS для квитирования угрозы
недекларированных
возможностей оборудования
GPS, связанных с принятием
навигационного решения.
29.
2930.
3031.
3132.
3233.
33Команда на
СВЧ реле
34.
3435.
35Наглядная информация о
видимых спутниках
36.
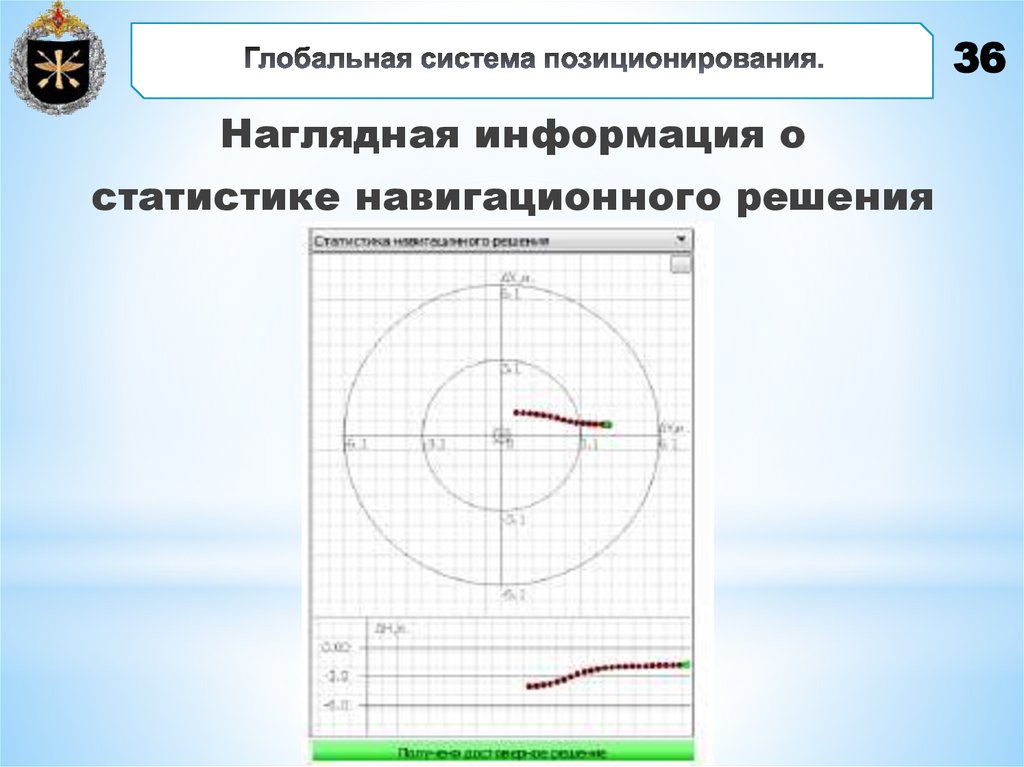
36Наглядная информация о
статистике навигационного решения
37.
Вопрос 3.Ответчик
государственного
опознавания.
38.
38Ответчик ГО предназначен для автоматического опознавания объекта
размещения авиационными, воздушными и
наземными (корабельными) объектами МО
РФ, оборудованными соответствующими
запросчиками ЕСГО путем приема
запросных сигналов, их анализа и
автоматического излучения ответных
сигналов.
39.
39Принцип опознавания состоит в том, что на
запрос органа УВД узел должен выдать
информацию. Действующая информация
время от времени меняется, и
обслуживающий персонал в нужное время
устанавливает нужную информацию.
Ответчик ГО работает по линиям
«Самолет-Самолет» и «Земля-Самолет»
(«Корабль-Самолет»)
40.
40Ответчик ГО состоит:
• Блок сопряжения ответчика (БСГО)
• Автоматического радиолокационного
ответчика изд.4206 (АРО)
• Двух антенн
• Комплект кабелей
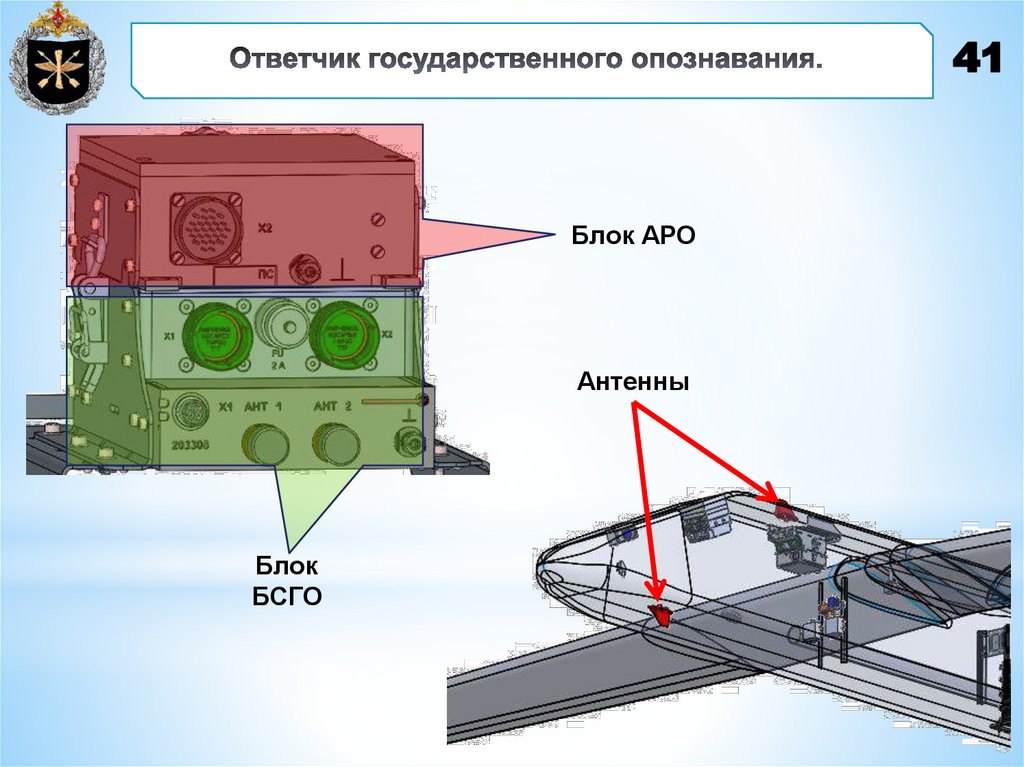
41.
41Блок АРО
Антенны
Блок
БСГО
42.
42Электропитание
от бортовых
аккумуляторов по
цепи постоянного
тока 27 В АКБ
подается при
включении
отдельного
включателя
(тумблера) SA
«ВКЛ 41МС2» на
борту БПЛА.
43. КОНТРОЛЬНЫЕ ВОПРОСЫ:
1. Опишите принцип определения координат ивысоты с помощью GPS.
2. Опишите принцип функционирования
системы автоматического взлета и посадки с
применением DGPS.
44. Задание на самоподготовку:
а) Основная:1. «Руководство по описанию системы».
ТМ–SR–00-1, глава 3 стр. 71-73, глава 5
стр. 37, 100-102, 117, 133-137, 144;
2. Дополнение №1 к Руководству полётной
эксплуатации TM-SR-05-2 стр.7-40,55-70.
3. Конспект лекций
б) Дополнительная:
1. «Руководство по летной эксплуатации»
ТМ–SR–05-2 глава 2 стр. 9-10, 24, глава
4 стр. 77, глава 8 стр. 9.