
 Электроника
ЭлектроникаПохожие презентации:








 и комбинированный датчик. Тема 3.7")

Датчики пространства. Тема 4
1. Тема 4
Датчики пространства2.
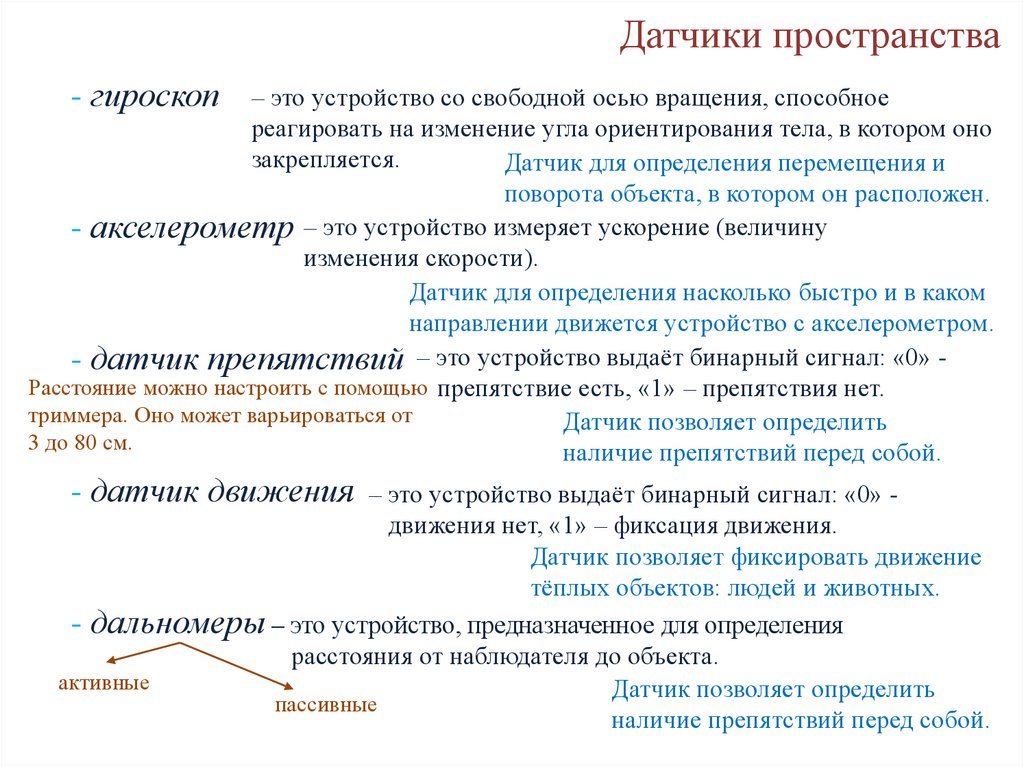
Датчики пространства- гироскоп
– это устройство со свободной осью вращения, способное
реагировать на изменение угла ориентирования тела, в котором оно
закрепляется.
Датчик для определения перемещения и
поворота объекта, в котором он расположен.
- акселерометр – это устройство измеряет ускорение (величину
изменения скорости).
Датчик для определения насколько быстро и в каком
направлении движется устройство с акселерометром.
- датчик препятствий – это устройство выдаёт бинарный сигнал: «0» Расстояние можно настроить с помощью препятствие есть, «1» – препятствия нет.
триммера. Оно может варьироваться от
Датчик позволяет определить
3 до 80 см.
наличие препятствий перед собой.
- датчик движения – это устройство выдаёт бинарный сигнал: «0» движения нет, «1» – фиксация движения.
Датчик позволяет фиксировать движение
тёплых объектов: людей и животных.
- дальномеры – это устройство, предназначенное для определения
расстояния от наблюдателя до объекта.
активные
Датчик позволяет определить
пассивные
наличие препятствий перед собой.
3.
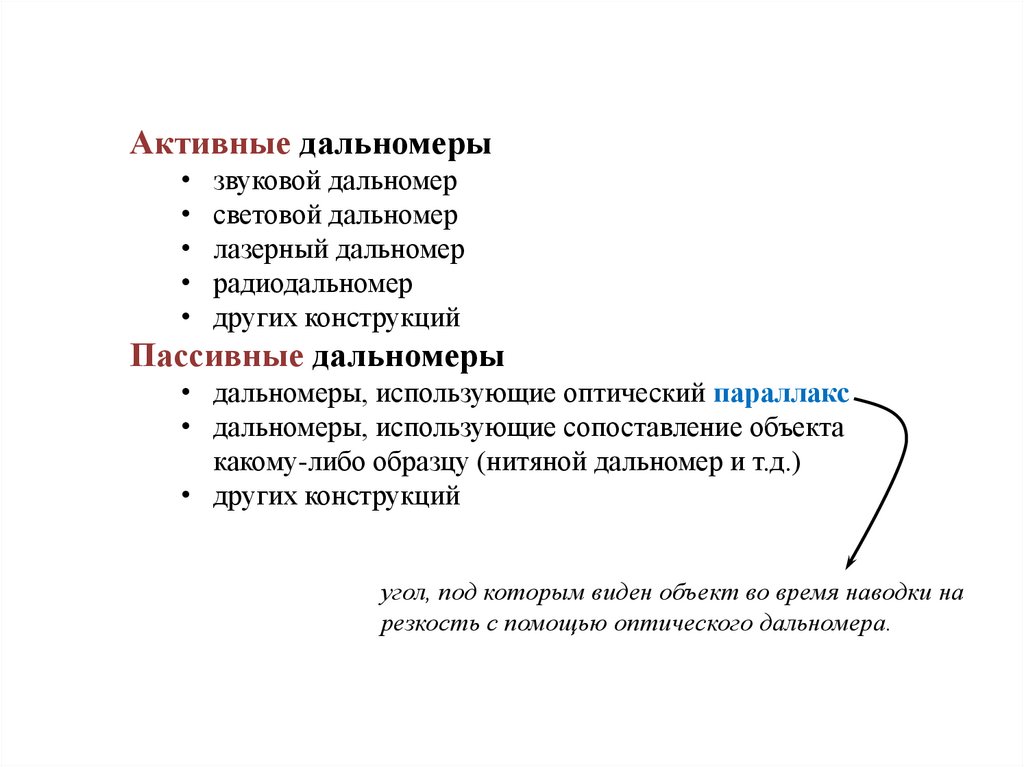
Активные дальномерызвуковой дальномер
световой дальномер
лазерный дальномер
радиодальномер
других конструкций
Пассивные дальномеры
• дальномеры, использующие оптический параллакс
• дальномеры, использующие сопоставление объекта
какому-либо образцу (нитяной дальномер и т.д.)
• других конструкций
угол, под которым виден объект во время наводки на
резкость с помощью оптического дальномера.
4.
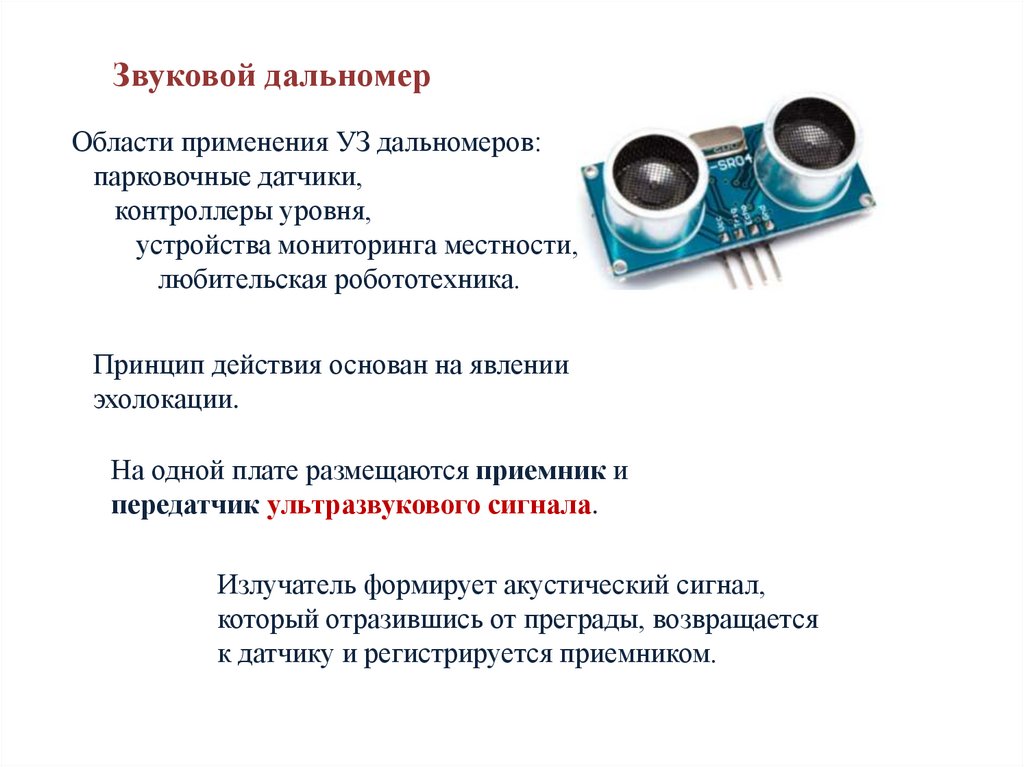
Звуковой дальномерОбласти применения УЗ дальномеров:
парковочные датчики,
контроллеры уровня,
устройства мониторинга местности,
любительская робототехника.
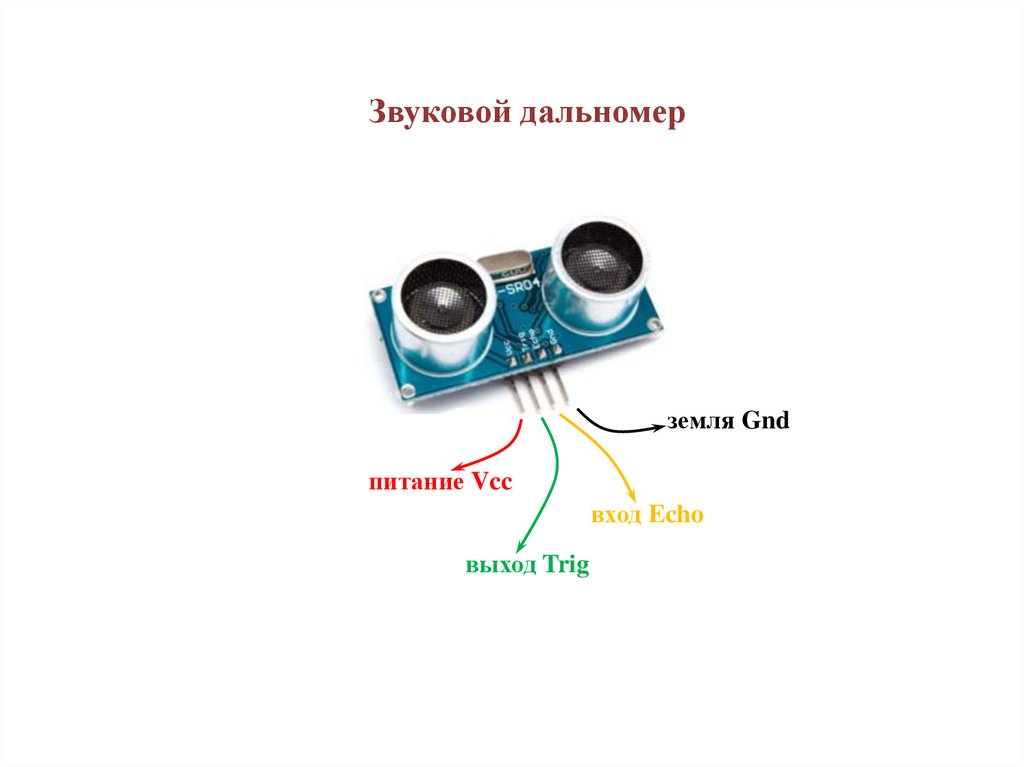
Принцип действия основан на явлении
эхолокации.
На одной плате размещаются приемник и
передатчик ультразвукового сигнала.
Излучатель формирует акустический сигнал,
который отразившись от преграды, возвращается
к датчику и регистрируется приемником.
5.
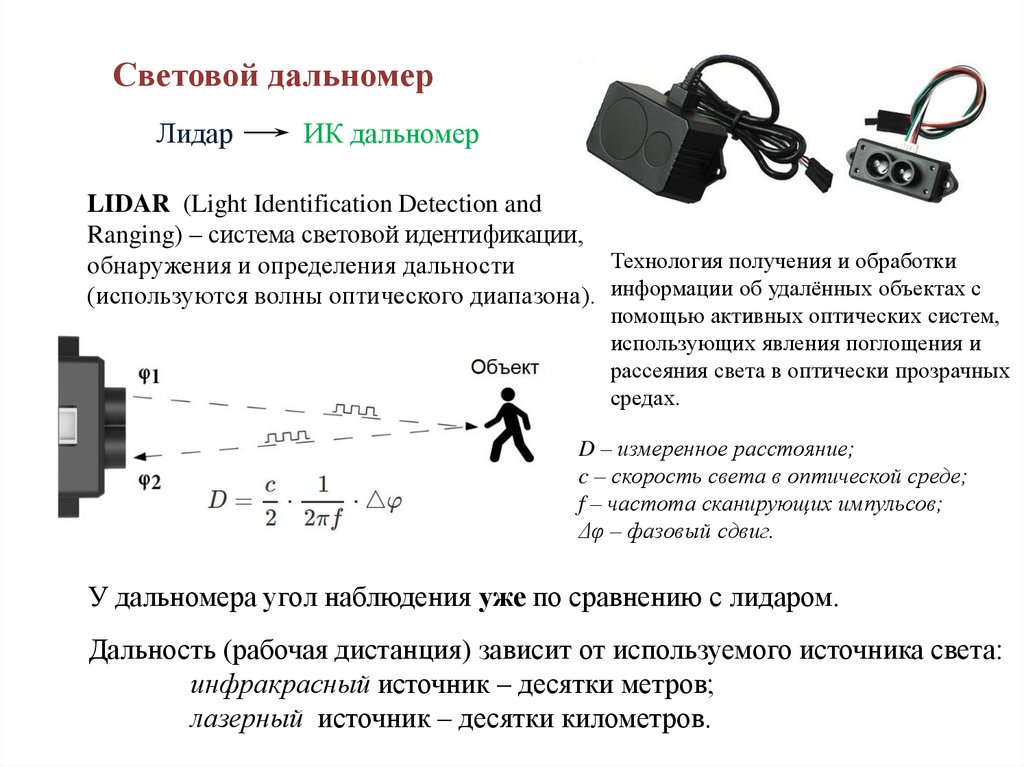
Световой дальномерЛидар
ИК дальномер
LIDAR (Light Identification Detection and
Ranging) – система световой идентификации,
Технология получения и обработки
обнаружения и определения дальности
(используются волны оптического диапазона). информации об удалённых объектах с
помощью активных оптических систем,
использующих явления поглощения и
рассеяния света в оптически прозрачных
средах.
D – измеренное расстояние;
c – скорость света в оптической среде;
f – частота сканирующих импульсов;
Δφ – фазовый сдвиг.
У дальномера угол наблюдения уже по сравнению с лидаром.
Дальность (рабочая дистанция) зависит от используемого источника света:
инфракрасный источник – десятки метров;
лазерный источник – десятки километров.
6.
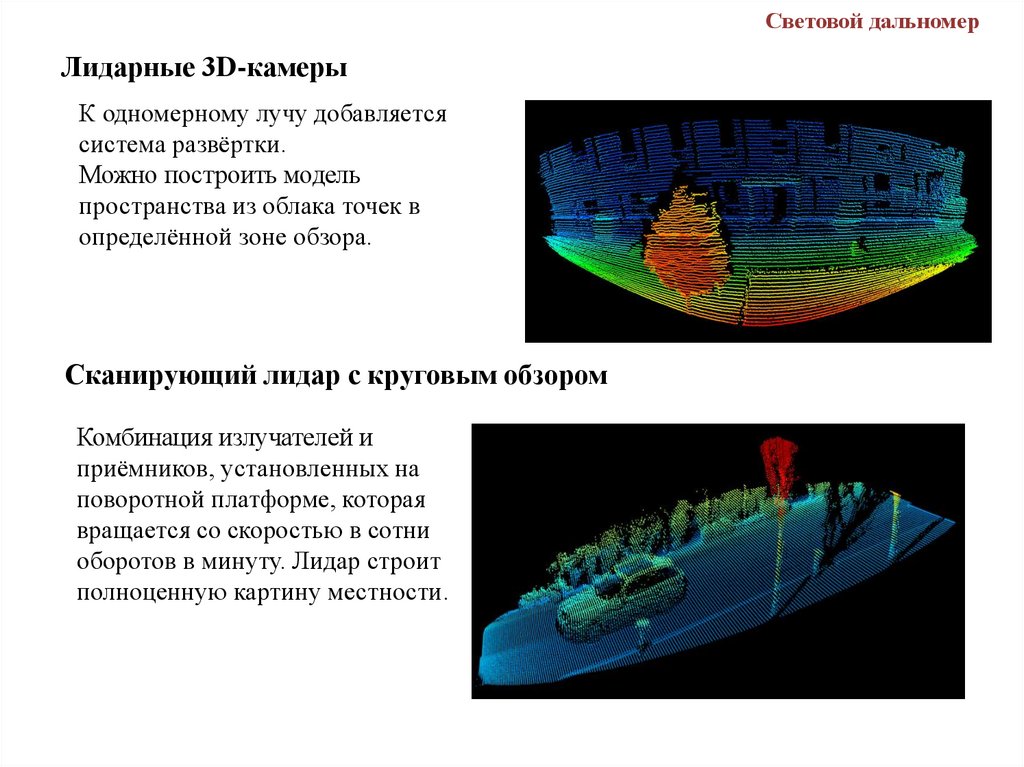
Световой дальномерЛидарные 3D-камеры
К одномерному лучу добавляется
система развёртки.
Можно построить модель
пространства из облака точек в
определённой зоне обзора.
Сканирующий лидар с круговым обзором
Комбинация излучателей и
приёмников, установленных на
поворотной платформе, которая
вращается со скоростью в сотни
оборотов в минуту. Лидар строит
полноценную картину местности.
7.
Световой дальномерЛазерный дальномер (VL6180) для определения расстояний без
«мёртвых зон», без проблем с многократными отражениями и
рассеиванием луча на предметах.
Он работает на очень большой частоте, поэтому содержит контроллер.
В модуль входит дополнительный датчик освещённости для
корректировки результатов измерений.
Сканирующие лидары в системах машинного зрения формируют
двумерную или трёхмерную картину окружающего пространства.
«Атмосферные» лидары способны не только определять расстояния
до непрозрачных отражающих целей, но и анализировать свойства
прозрачной среды, рассеивающей и поглощающей свет.
Доплеровские лидары, определяющие направление и скорость
перемещения воздушных потоков в различных слоях атмосферы.
8.
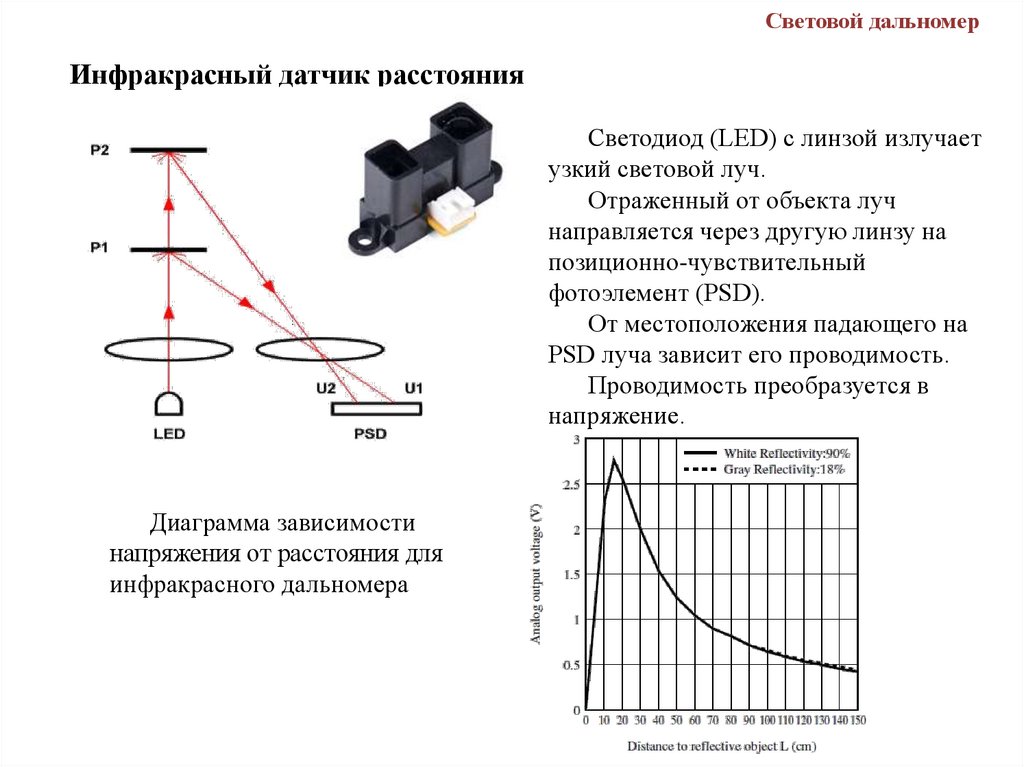
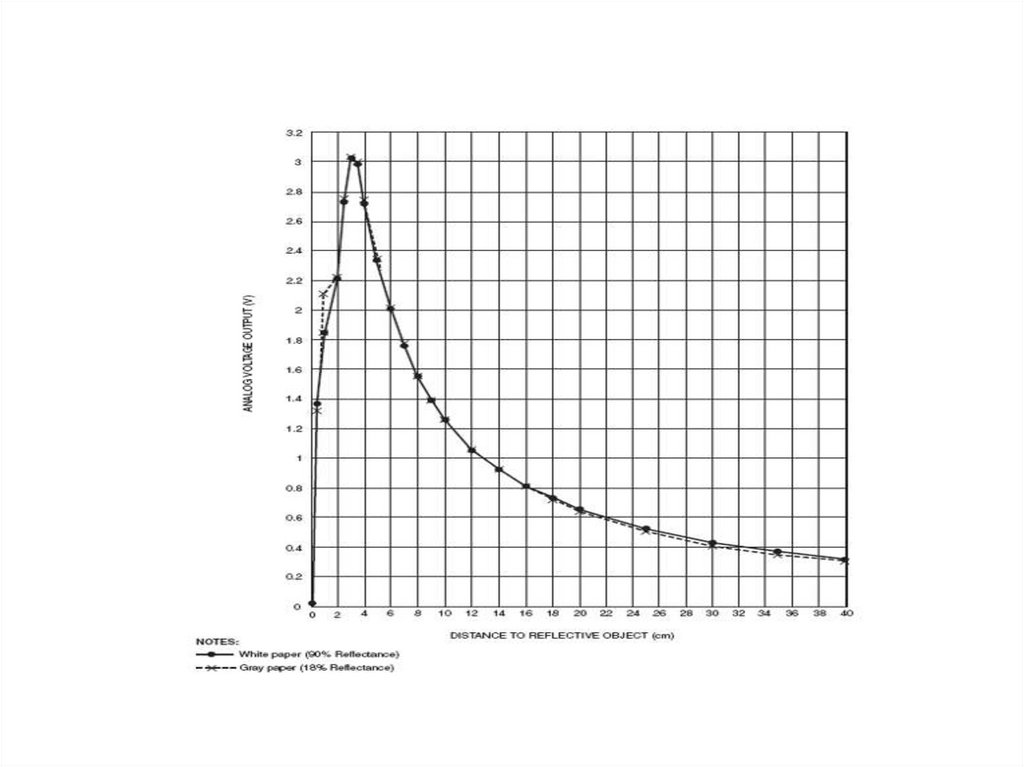
Световой дальномерИнфракрасный датчик расстояния
Светодиод (LED) с линзой излучает
узкий световой луч.
Отраженный от объекта луч
направляется через другую линзу на
позиционно-чувствительный
фотоэлемент (PSD).
От местоположения падающего на
PSD луча зависит его проводимость.
Проводимость преобразуется в
напряжение.
Диаграмма зависимости
напряжения от расстояния для
инфракрасного дальномера
9.
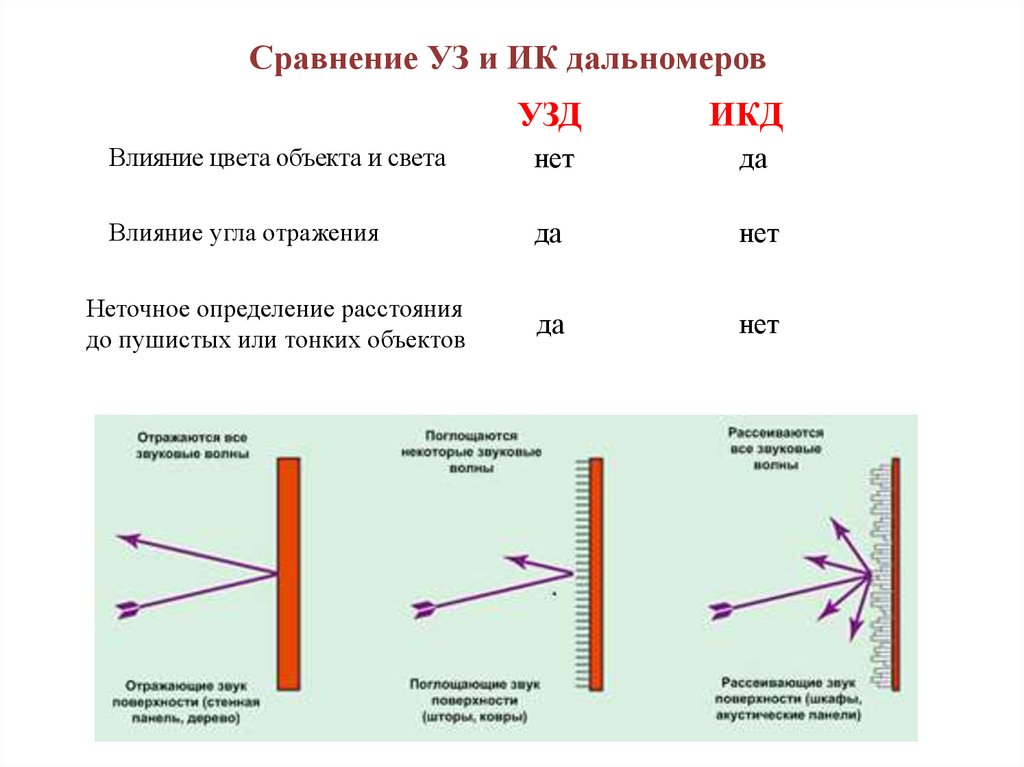
Сравнение УЗ и ИК дальномеровУЗД
ИКД
Влияние цвета объекта и света
нет
да
Влияние угла отражения
да
нет
да
нет
Неточное определение расстояния
до пушистых или тонких объектов
10.
Звуковой дальномерземля Gnd
питание Vcc
вход Echo
выход Trig
11.
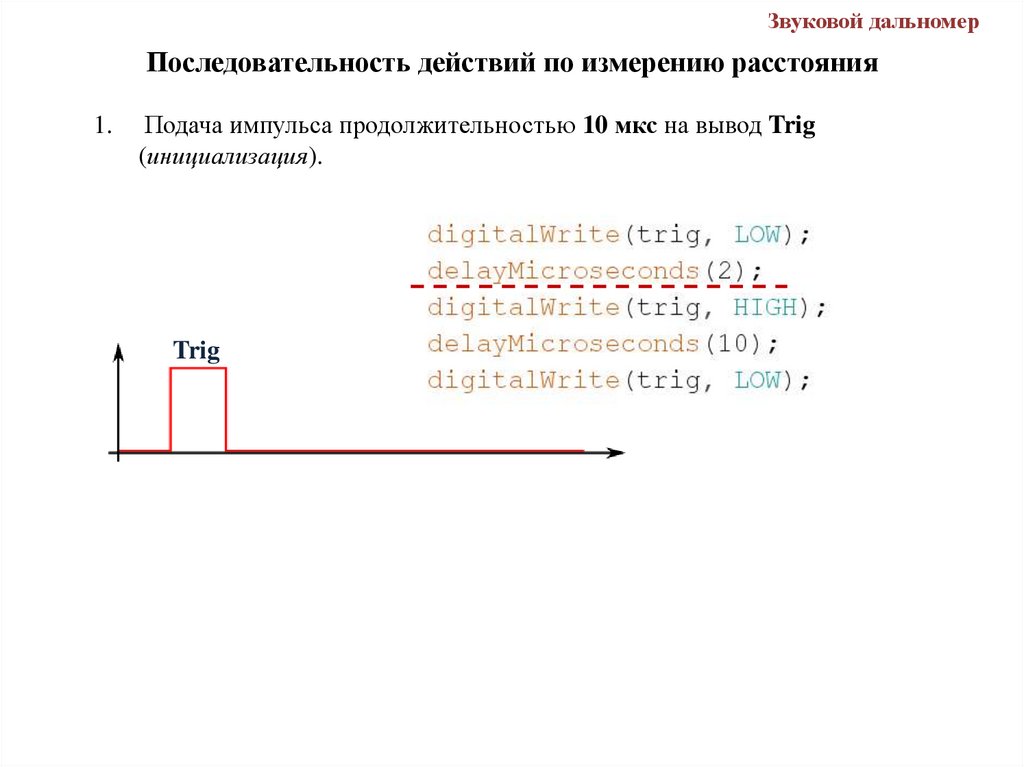
Звуковой дальномерПоследовательность действий по измерению расстояния
1.
Подача импульса продолжительностью 10 мкс на вывод Trig
(инициализация).
Trig
излучатель T
Echo
12.
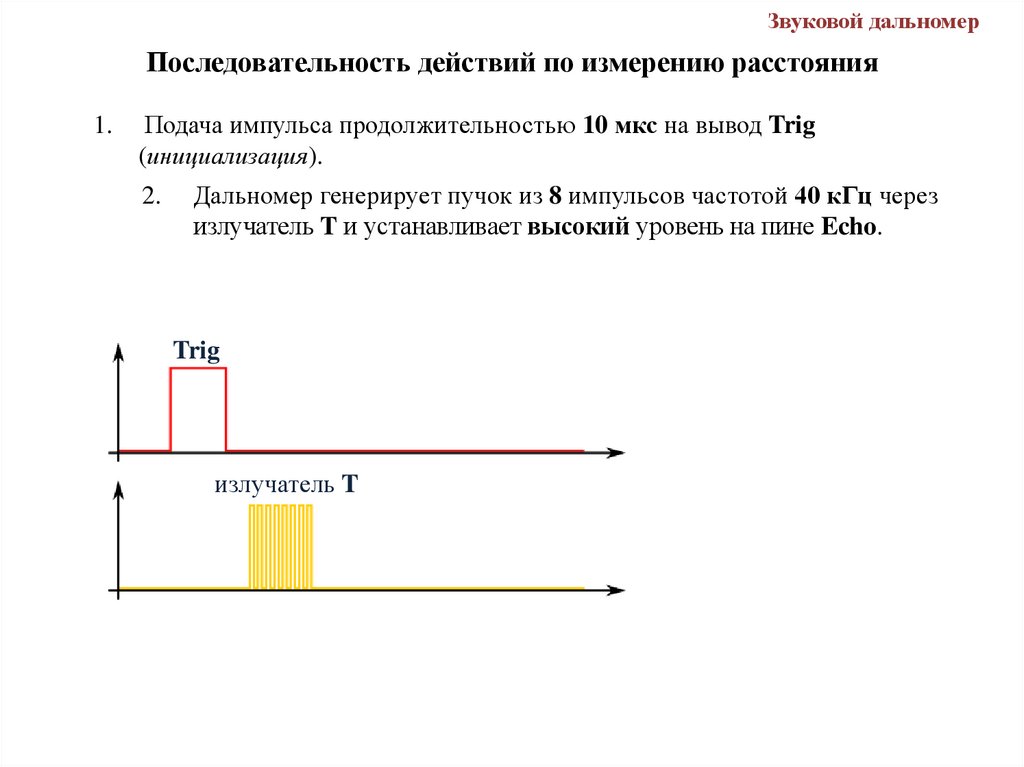
Звуковой дальномерПоследовательность действий по измерению расстояния
1.
Подача импульса продолжительностью 10 мкс на вывод Trig
(инициализация).
2.
Дальномер генерирует пучок из 8 импульсов частотой 40 кГц через
излучатель T и устанавливает высокий уровень на пине Echo.
Trig
излучатель T
Echo
13.
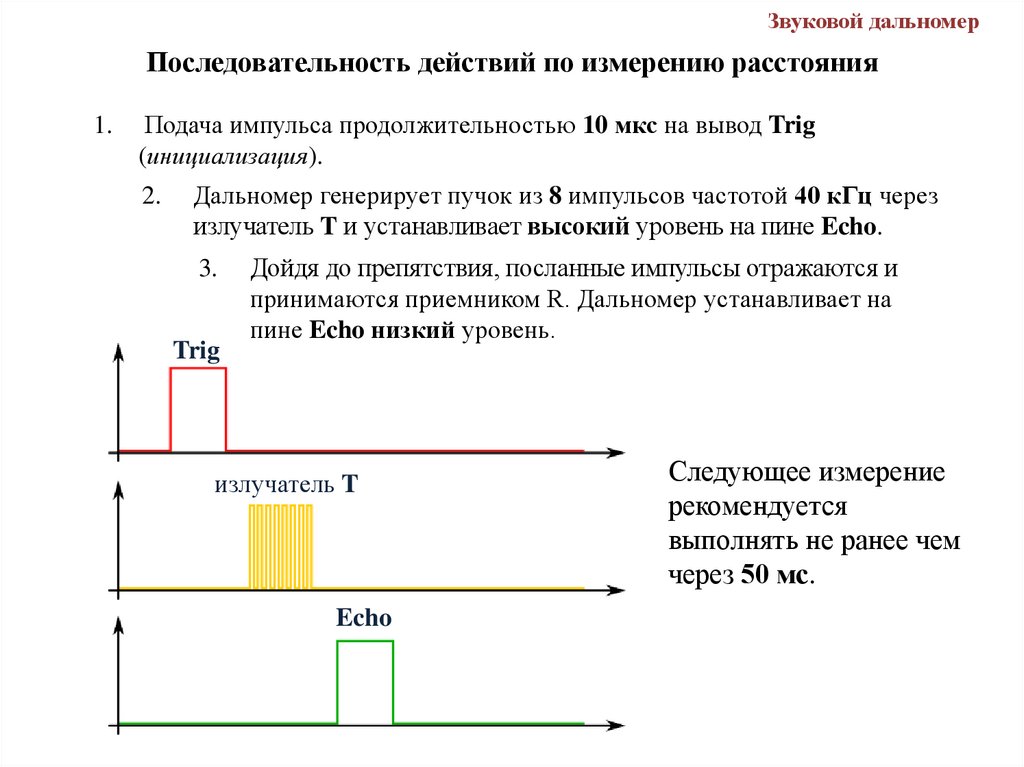
Звуковой дальномерПоследовательность действий по измерению расстояния
1.
Подача импульса продолжительностью 10 мкс на вывод Trig
(инициализация).
2.
Дальномер генерирует пучок из 8 импульсов частотой 40 кГц через
излучатель T и устанавливает высокий уровень на пине Echo.
3.
Trig
Дойдя до препятствия, посланные импульсы отражаются и
принимаются приемником R. Дальномер устанавливает на
пине Echo низкий уровень.
излучатель T
Echo
Следующее измерение
рекомендуется
выполнять не ранее чем
через 50 мс.
14.
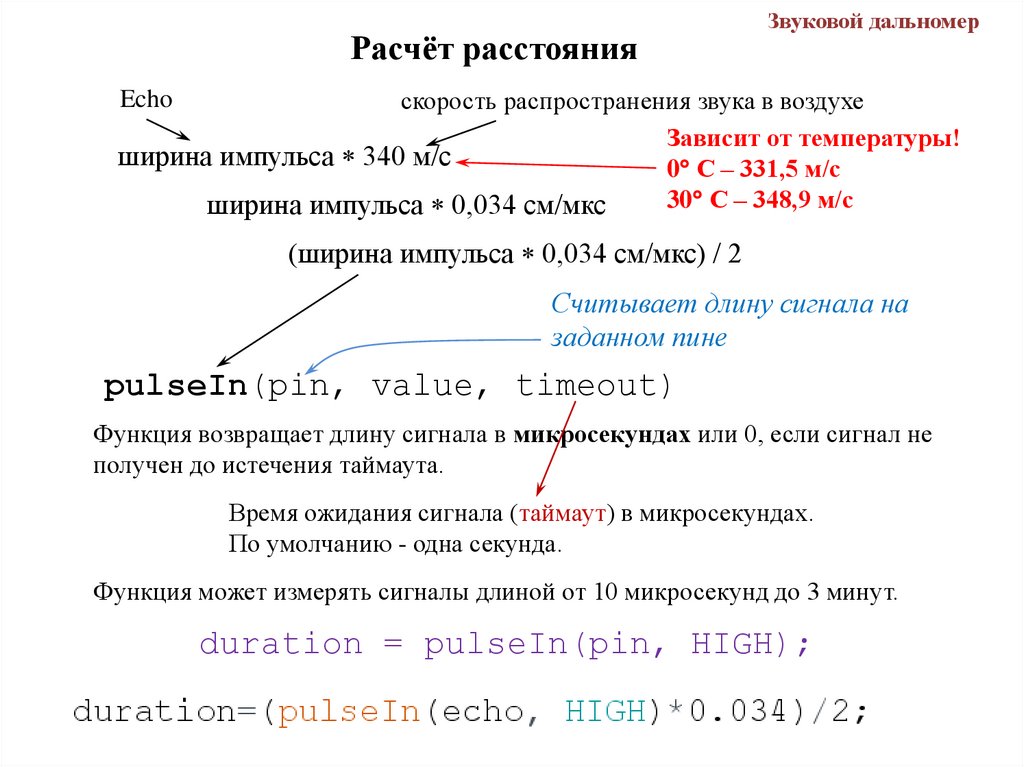
Расчёт расстоянияЗвуковой дальномер
скорость распространения звука в воздухе
Зависит от температуры!
ширина импульса 340 м/с
0 С – 331,5 м/с
30 С – 348,9 м/с
ширина импульса 0,034 см/мкс
Echo
(ширина импульса 0,034 см/мкс) / 2
Считывает длину сигнала на
заданном пине
pulseIn(pin, value, timeout)
Функция возвращает длину сигнала в микросекундах или 0, если сигнал не
получен до истечения таймаута.
Время ожидания сигнала (таймаут) в микросекундах.
По умолчанию - одна секунда.
Функция может измерять сигналы длиной от 10 микросекунд до 3 минут.
duration = pulseIn(pin, HIGH);
15.
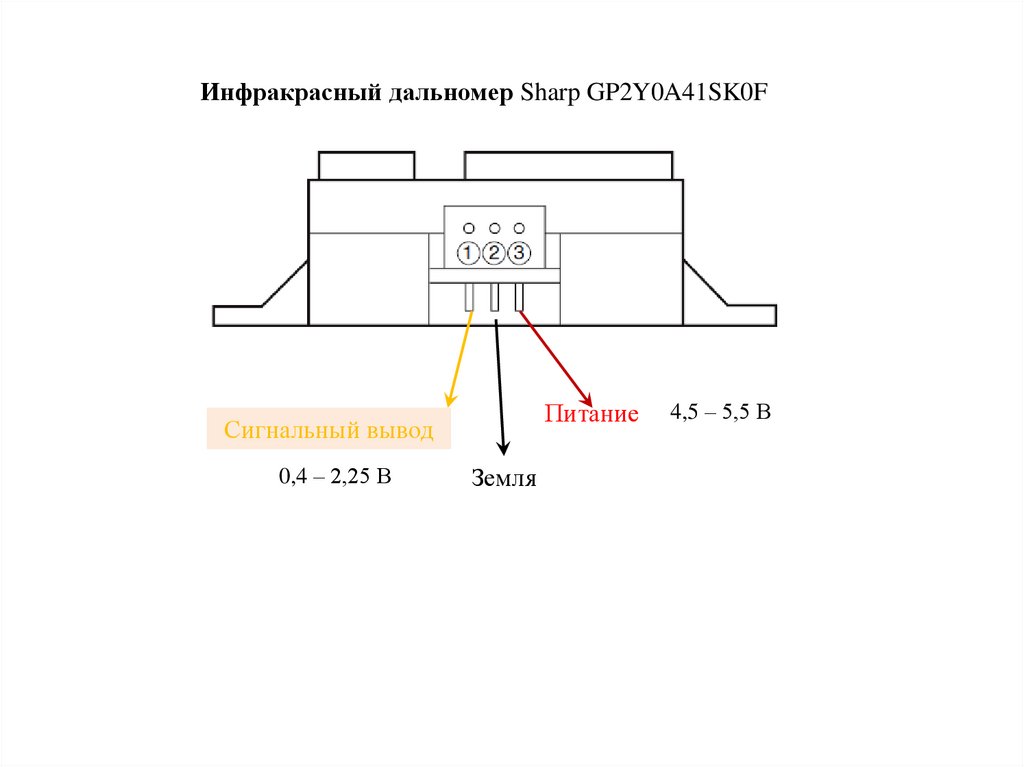
Инфракрасный дальномер Sharp GP2Y0A41SK0FПитание
Сигнальный вывод
0,4 – 2,25 В
Земля
4,5 – 5,5 В
16.
17.
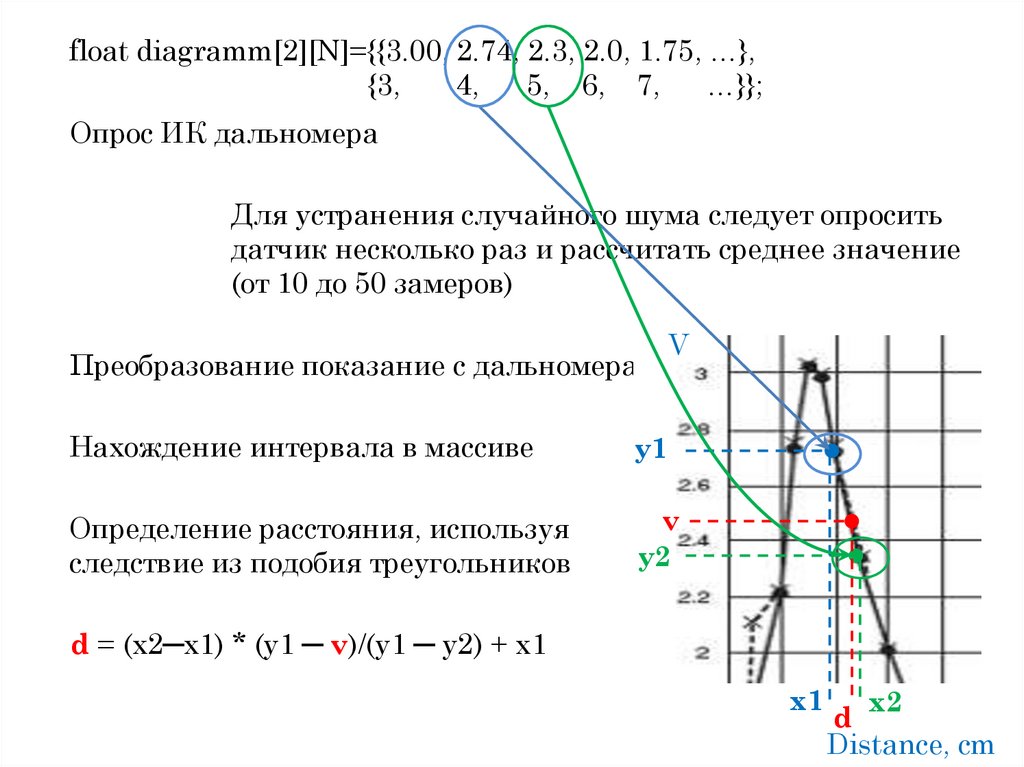
float diagramm[2][N]={{3.00, 2.74, 2.3, 2.0, 1.75, …},{3,
4,
5, 6, 7,
…}};
Опрос ИК дальномера
Для устранения случайного шума следует опросить
датчик несколько раз и рассчитать среднее значение
(от 10 до 50 замеров)
V
Преобразование показание с дальномера в значение напряжения
Нахождение интервала в массиве
y1
Определение расстояния, используя
следствие из подобия треугольников
v
y2
d = (x2─x1) * (y1 ─ v)/(y1 ─ y2) + x1
x1
x2
d
Distance, cm
18.
№1. Ультразвуковой дальномерСобрать схему, состоящую из контроллера, 3-х светодиодов и УЗдальномера.
Запрограммировать следующим образом. Производить измерения
расстояние до объектов дальномером и выводить на СОМ-порт в
сантиметрах. Посредством светодиодов сигнализировать о расстоянии:
красный светодиод – расстояние от min до 1/3 диапазона;
жёлтый светодиод – расстояние от 1/3 диапазона до 2/3 диапазона;
зелёный светодиод – расстояние от 2/3 диапазона до max.
Опрос дальномера оформить в виде функции.
19.
№2. Инфракрасный дальномерСобрать схему, состоящую из контроллера, 3-х светодиодов и ИКдальномера.
Запрограммировать следующим образом. Производить измерения
расстояние до объектов дальномером и выводить на СОМ-порт
считываемое напряжение и рассчитанное по напряжению расстояние.
Посредством светодиодов сигнализировать о расстоянии:
красный светодиод – расстояние от min до 1/3 диапазона;
жёлтый светодиод – расстояние от 1/3 диапазона до 2/3 диапазона;
зелёный светодиод – расстояние от 2/3 диапазона до max.