
























 Программное обеспечение
Программное обеспечениеПохожие презентации:










Современные системы противоаварийной автоматики
1. Современные системы противоаварийной автоматики
Релейная защита и автоматика энергосистем 201229 - 31 мая 2012, ВВЦ, Москва
Современные системы
противоаварийной автоматики
Демчук Анатолий Тимофеевич, ОАО «СО ЕЭС»
2.
Причины, определяющие высокую значимостьсистемы ПА ЕЭС России
Особенности ЕЭС ЕЭС России
реверсивность потоков активной мощности
ограничение режимов условиями устойчивости
необходимость передачи больших объемов электроэнергии на большие
расстояния
необходимость управления при нормативных возмущениях
2
3. Цели ПА
3Обеспечение живучести энергосистемы при
аварийных возмущениях
Повышение степени использования пропускной
способности электрических сетей
энергосистемы
4. Виды ПА
ПА для повышения степени использования пропускной способности:• Автоматика предотвращения нарушения устойчивости (АПНУ)
ПА для обеспечения живучести:
• Автоматика ликвидации асинхронного режима (АЛАР);
• Автоматика ограничения снижения частоты (АОСЧ, включает в себя АЧР,
АЧВР, ЧАПВ, ЧДА);
• Автоматика ограничения снижения напряжения (АОСН);
• Автоматика ограничения повышения частоты (АОПЧ);
• Автоматика ограничения повышения напряжения (АОПН);
• Автоматика ограничение перегрузки оборудования (АОПО)
4
5.
Дальнейшее развитие ПАУв области локальной ПА
5
Совершенствование алгоритмов локальной
автоматики:
Уход от релейных принципов;
Интеллектуализация
Создание нового программно-технического
комплекса ЛПА:
Новая система обработки входных сигналов;
Связь с АСУ ТП;
Связь с ЦСПА
5
6.
Локальные и централизованныеустройства ПА
6
Принцип 2ДО в ЛАПНУ и ЦСПА при решении задач АПНУ
Избыточность управляющих воздействий;
Ограничение режимов
Принцип 1ДО в ЦСПА
Эффективность;
Возможность совершенствования
6
7. Пути повышения эффективности существующих видов ПА
Внедрение современных программно-технических средств;
Разработка высокоадаптивных алгоритмов ПА – за счёт повышения
точности моделирования процессов в защищаемом объекте управления
(детальный системный учёт влияющих факторов);
Использование современных принципов построения архитектуры
систем, выполняющих сложные расчёты в непрерывном режиме;
Широкое применение возможностей СМПР и FACTS;
Обеспечение определения УВ для нерасчётных возмущений – для
недопущения каскадных аварий.
7
8. ЛАПНУ, низовой уровень ЦСПА
8Таблица УВ от верхнего уровня ЦСПА
Прием, хранение
и обновление
решений
Ввод сигнала
об аварийном
отключении
Выборка из
таблицы
решений
Вывод
управляющих
воздействий
9. Примеры ЛАПНУ. Управляющая таблица
9Схема
сети,
схема
станции
(Nсх)
Аварийное
Действие УПА
отключение
ВЛ- 500, ВВ,
С.Ш.
Сечен
ие
Очередность привлечения УВ
признак
(ОГ, РТ, ОН)
min ОГ
(ЛПО)
№
ЛПО
ВЛ-500
включены,
Номер хар-ки и
знач. Ку
18
(1- да,
Ку
0 – нет)
ОГ3, ОГ1,
ОГ2
1
+1
6
ОН1,
ОН2, …
-
+3
7
ОН1,
ОН2, …
-
33
-1
2
1,15
-
ОГ3, ОГ1,
ОГ2
1
23
-1
2
1,15
РТ1, РТ2, РТ3, РТуд
-
-
все выключатели
включены
1,2
РТ1, РТ2, РТ3, РТуд
-1
1
10. Примеры ЛАПНУ. Настроечная характеристика УВ
10Р ув (МВт)
2500
2310
2000
1500
1400
1000
500
500
0
0
500
0
1000
1500
2000
Р в сеч.(МВт)
11. Структура ЦСПА
11Доаварийная телеинформация
Подсистема «Телемеханика»
Верхний уровень ЦСПА
В ОДУ (РДУ)
Низовой уровень ЦСПА
Сигналы об
аварийном
отключении
(Удаленные контроллеры ПА)
Подсистема передачи аварийной
и управляющей информации
Объект управления –ОЭС (РЭС)
Команды
управляющих
воздействий
12. Верхний уровень ЦСПА
12Подсистема «Телемеханика»
Ввод телеинформации
Оценка телеинформации
Получение достоверной
картины режима
Расчет управляющих воздействий
для каждого учитываемого
аварийного возмущения
Вывод решений на низовой уровень ЦСПА (удаленный контроллер
противоаварийной автоматики)
Контроль диспетчера
13. ЦПА ОЭС на базе ЭВМ ЕС-1011
13Узловые модели алгоритма
Расчёт проводимостей эквивалентных
генераторов:
Y Ui Ii
Ui Y
, где i =[ 1, Nузл. ]
I i 0,0,.., ii 1,..,0
yэквi , jk
1
Ii
Ui
yi jk (
1)
U jk
14. ЦСПА на базе ЭВМ ЕС-1011
1414
ДИАГРАММА ПОИСКА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
Расходящийся процесс
ДЛЯ УЗЛОВОЙ МОДЕЛИ
( j)
k
F
n
KPi ( j ) K загi
i 1
Pmax i
,
- проекция вектора изменения
режима при управлении на радиусвектор ПАР;
где
( j)
Fk( j ) KPi
- изменение Кзаг i-го луча звезды при
Pmax i
единичном управлении в j-м узле.
Ранжировка по совокупности всех
звезд
Ф j i Fi J
i
где i – номер звезды из «черного» списка;
γi – коэффициент, характеризующий тяжесть
режима i-й звезды.
Условие выбора места очередной ступени УВ
Ф j max max j jmФ ( j )
j
15. Архитектура технических средств
1516. Система передачи аварийной и управляющей информации
1617.
Цели и задачи ЦСПА нового поколения17
Основная цель разработки ЦСПА нового поколения – повышение точности и
сокращение избыточности управляющих воздействий (снижение ущерба) и
расширение области допустимых режимов работы энергосистемы при
ограниченном объеме УВ.
Основная
задача,
универсальных
для
достижения
алгоритмов
расчета
указанной
УВ
по
цели
условиям
-
разработка
статической
и
динамической устойчивости с учетом:
- нормативных запасов устойчивости по активной мощности и напряжению и
ограничений по токовой загрузке элементов сети;
- динамической составляющей аварийных процессов, обусловленной как
короткими замыканиями, так и действиями линейной автоматики для
локализации
аварийного
возмущения
(АПВ)
на
базе
подробных
(общепринятых) моделей основных элементов и средств регулирования и
автоматики энергосистем.
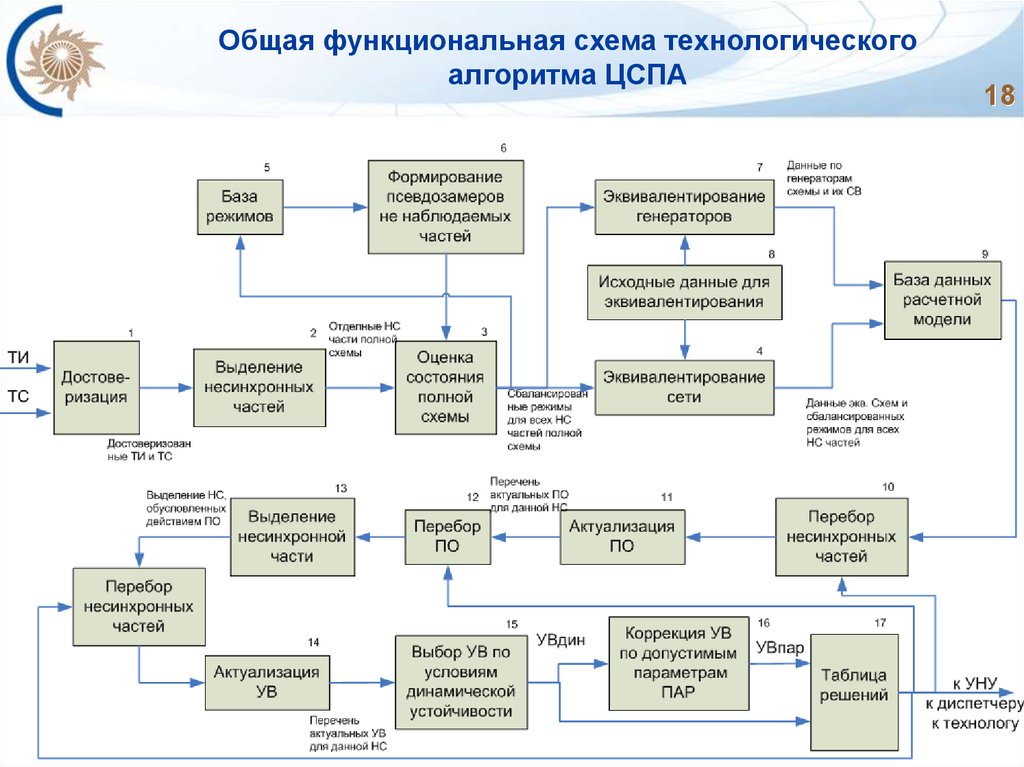
18.
Общая функциональная схема технологическогоалгоритма ЦСПА
18
19.
Функциональная схема алгоритма выбора УВ поусловиям динамической устойчивости
19
Начало
1
Подготовка
исходных данных
2
Задание начальных
условий для очередного
цикла расчета ПП
3
Шаг
интегрирования ПП
4
Выявление
«неустойчивых»
ветвей
Есть
5
Выявление
аварийного
сечения
Аварийное
Нет
11
сечение
получено
9
Распределение УВ между СМ
несинхронных
частей
Выбор УВ для
2-х машинного
эквивалента
8
7
Формирование
2-х машинного
эквивалента
10
14
Коррекция
УВ
Да
УВ 13
избыточны
?
Нет
4
Оценка
устойчивости
6
Разделение на
несинхронные
части
Да
Ввод УВ в
вычислительный
алгоритм
Нет
Процесс
устойчив
УВ 12
вводились
?
Нет
Нет
16
Вывод:
Управление
не требуется
15
Вывод:
Выбранные
УВ
Конец
20. Модели элементов для расчета динамической устойчивости
20Полными уравнениями с АРВ и СВ без моделей
Генераторы турбин. Возможно задание Е за Х.
В дальнейшем – модели турбин (упрощенные) с АРС
Нагрузки
Аварийные
возмущения
УВ
Статическими характеристиками и синхронными
двигателями.
В дальнейшем для ограниченного числа нагрузок –
асинхронный двигатель + шунт.
Изменение (отключение) генераторов, изменение
нагрузок, включение/отключение шунтов в узлах (КЗ),
отключение ветвей.
Изменение генераторов, отключение генераторов,
изменение нагрузок, электрическое торможение.
Учет запаздывания на ввод УВ.
В дальнейшем – импульсная разгрузка
21. Функциональная схема алгоритма расчета УВ по условиям допустимости ПАР
21Начало
1
2
Первичная обработка исходных данных
Формирование матриц А и С
уравнений УР, контроль сбвлансированности исходного режима,
расчет векторов ЭДС в модели
УР энергосистемы
Ввод исходных данных:
о схеме, режиме, доступных
УВ, расчетном возмущении
(пусковом органе), выбранных
УВ в динамической фазе ПП
5
6
Расчет ПР
по вектору
изменения режима
по мощности (ВИРМ)
Расчет ОС
по вектору
изменения режима
по углу (ВИРУ)
7
Коррекция матрицы А
и доступных УВ по использованным в динамической фазе ПП
8
9
Да
Нет
12
Требуется
балансировка по ступеням
УВ ?
На конец
Выполнены
условия
допустимости
ПАР?
Нет
Да
10
Расчет дополнительных УВ по условиям
допустимости ПАР
13
Балансировка суммарных
УВ по доступных ступеням
Нет
11
УВ
достаточно?
14
Да
Балансировка
успешна ?
Нет
Конец
Коррекция матриц А
и С по возмущению
4
Задание начальных условий
для очередного цикла расчета дополнительных УВ
по условиям допустимости
ПАР
Расчет УР
в t+0
3
Да
22. Модели элементов энергосистемы для расчета послеаварийного режима
22Е за Х.
Генераторы Мощность (турбины) с учетом
регулирующего эффекта по частоте
Нагрузки
Статическими характеристиками по
напряжению и частоте
Аварийные Определяется блоком расчета
возмущения динамической фазы переходного
процесса
УВ
Изменение генераторов, отключение
генераторов, изменение нагрузок
23.
Структура ЕЭС/ОЭС23
24. Создание новых видов ПА
24Создание координирующей системы противоаварийной автоматики
(КСПА) ЕЭС России, для эффективной координации ЦСПА ОЭС и РЭС
путём обеспечения этих ЦСПА текущими значениями:
внешних эквивалентов для расчётных моделей зон, защищаемых
ЦСПА;
максимально-допустимых небалансов при реализации управляющих
воздействий ЦСПА;
максимально допустимых набросов мощности при отключении ВЛ на
транзитные связи зон, защищаемых соседними ЦСПА,
(сроки создания 2013-2016);
Разработка и реализация принципов противоаварийного управления
энергосистемами мегаполисов(2012-2014)
Создание автоматики восстановления электроснабжения погашенных
энергорайонов (2013-2015)
25. Выводы
25ПА является важнейшим необходимым элементом системы
управления режимами ЕЭС России.
Эффективное развитие энергосистем возможно только на
основе комплексного подхода, гармонично сочетающего как
строительство генерации и сетей, так и внедрение систем
управление режимами, исключительно важную роль среди
которых играют системы ПА.