















:")







")

 Электроника
ЭлектроникаПохожие презентации:










Системы приводов, мехатроника и робототехника
1.
Министерство образования и науки Российской Федерациифедеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
БАЛТИЙСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
«ВОЕНМЕХ» им. Д.Ф. УСТИНОВА
Кафедра И8
Системы приводов, мехатроника и робототехника
К.т.н., доцент Савельев Б.Н.
Дисциплина
Раздел Гидравлические приводы РТС
Презентация курса лекций
1-я часть
Санкт – Петербург
2025 г.
2.
Основные понятия и определенияТехническая система - устройство, которое обладает совокупностью
следующих основных признаков:
- является законченным видом технической продукции;
- состоит из взаимодействующих элементов, узлов, агрегатов, подсистем;
- самостоятельно выполняет определенные функции;
- взаимодействует с внешней средой и другими техническими объектами.
Гидропривод – совокупность устройств, объединенных в техническую
систему, предназначенную для приведения в движение и управление
движением механических объектов с помощью жидкости под давлением.
Гидроприводы подразделяются на два больших класса:
1. нерегулируемый гидропривод;
2. регулируемый гидропривод.
Нерегулируемый гидропривод содержит в своем составе лишь
устройства, обеспечивающие пуск и отключение гидродвигателя.
Регулируемый гидропривод представляет собой
гидромеханическое устройство, позволяющее управлять процессом
движения некоторого механизма (объекта управления).
3.
КЛАССИФИКАЦИЯГИДРОПРИВОДОВ
По степени автоматизации гидроприводы
подразделяют на виды
Неавтоматизированный гидропривод ,все операции управления
которым выполняет оператор;
Автоматизированный гидропривод, часть операций управления в
котором выполняют устройства управления без участия оператора;
Автоматический гидропривод, все операции управления в котором
выполняют устройства управления без участия оператора;
Современные гидроприводы ,как правило, являются системами
автоматизированного или автоматического привода, поэтому их
классифицируют как и другие системы автоматического регулирования.
4.
. Система автоматического управления (САУ)САУ каким-либо объектом называется техническая система, включающая
в себя этот объект управления(ОУ) и присоединяемую к нему
автоматическую аппаратуру, обеспечивающую заданный режим работы или
выходные переменные объекта в соответствии с командами задающего
устройства, являющегося частью этой автоматической аппаратуры.
Автоматическая управляющая система - автоматическая аппаратура САУ.
Система автоматического регулирования (САР)
САР – техническая система, в которой задаваемый от внешнего задающего
устройства или оператора режим работы ОУ или его регулируемая переменная
воспроизводится и поддерживается с помощью присоединяемых к ОУ
автоматически действующих устройств.
14. Автоматический регулятор - автоматические устройства САР,
5.
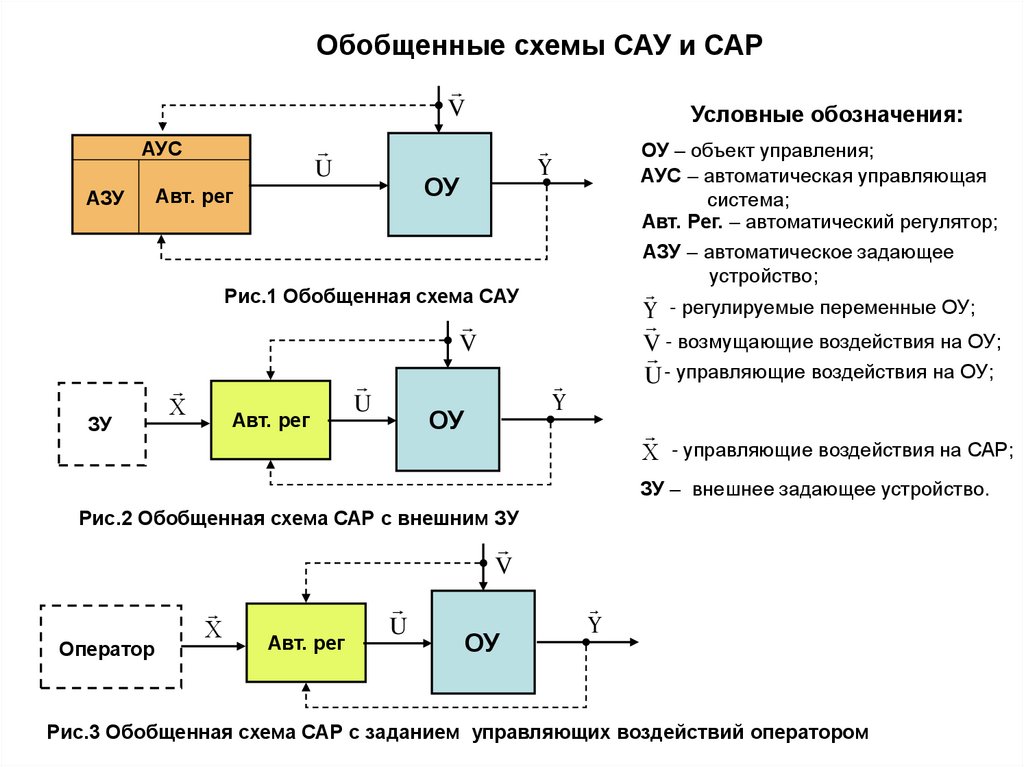
Обобщенные схемы САУ и САРV
U
АУС
АЗУ
Условные обозначения:
Y
ОУ
Авт. рег
ОУ – объект управления;
АУС – автоматическая управляющая
система;
Авт. Рег. – автоматический регулятор;
АЗУ – автоматическое задающее
устройство;
Y - регулируемые переменные ОУ;
- возмущающие воздействия на ОУ;
V
U - управляющие воздействия на ОУ;
Рис.1 Обобщенная схема САУ
V
ЗУ
Авт. рег
U
Y
ОУ
- управляющие воздействия на САР;
ЗУ – внешнее задающее устройство.
Рис.2 Обобщенная схема САР с внешним ЗУ
V
Оператор
Авт. рег
U
ОУ
Y
Рис.3 Обобщенная схема САР с заданием управляющих воздействий оператором
6.
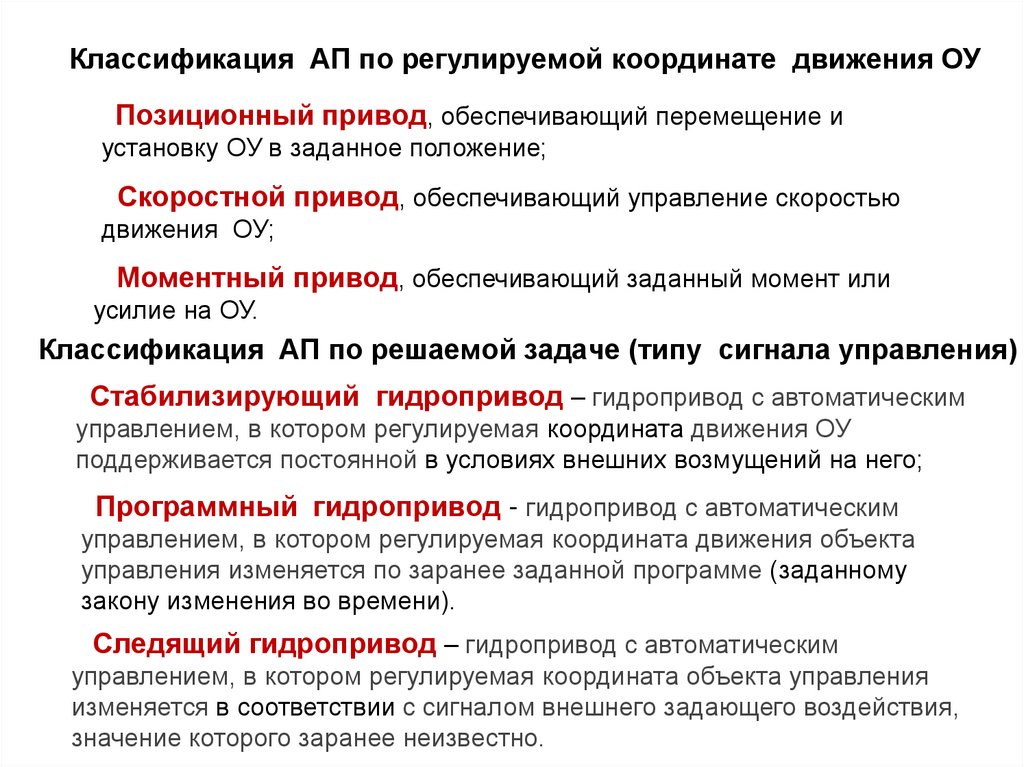
Классификация АП по регулируемой координате движения ОУПозиционный привод, обеспечивающий перемещение и
установку ОУ в заданное положение;
Скоростной привод, обеспечивающий управление скоростью
движения ОУ;
Моментный привод, обеспечивающий заданный момент или
усилие на ОУ.
Классификация АП по решаемой задаче (типу сигнала управления)
Стабилизирующий гидропривод – гидропривод с автоматическим
управлением, в котором регулируемая координата движения ОУ
поддерживается постоянной в условиях внешних возмущений на него;
Программный гидропривод - гидропривод с автоматическим
управлением, в котором регулируемая координата движения объекта
управления изменяется по заранее заданной программе (заданному
закону изменения во времени).
Следящий гидропривод – гидропривод с автоматическим
управлением, в котором регулируемая координата объекта управления
изменяется в соответствии с сигналом внешнего задающего воздействия,
значение которого заранее неизвестно.
7.
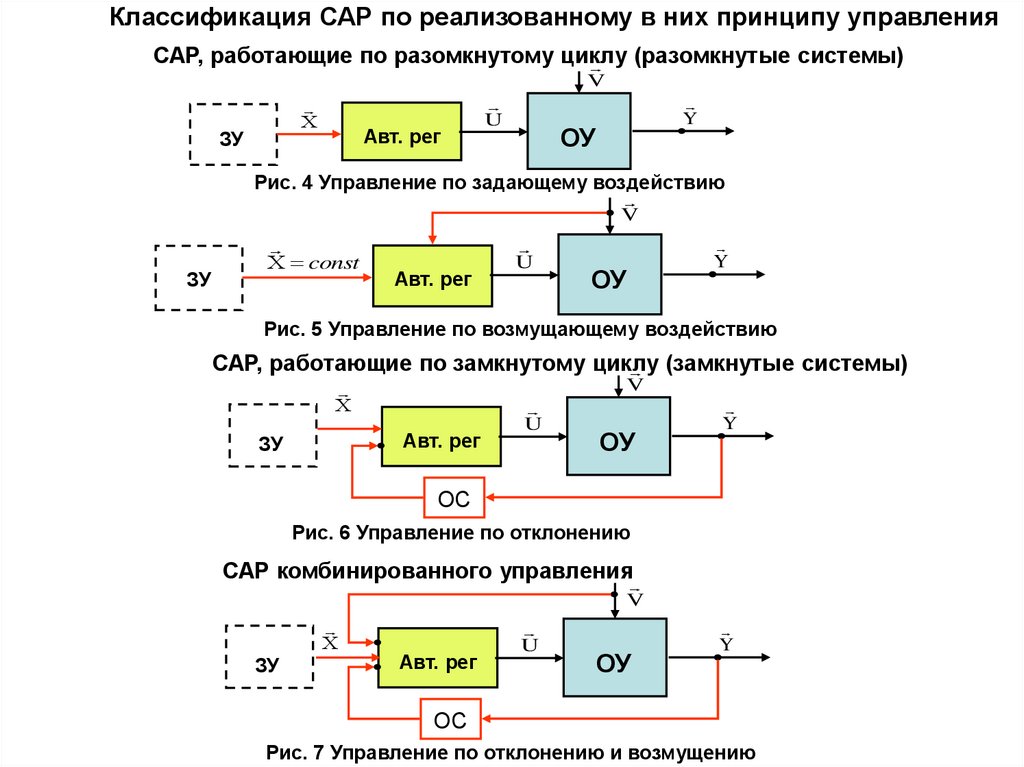
Классификация САР по реализованному в них принципу управленияСАР, работающие по разомкнутому циклу
(разомкнутые системы)
V
ЗУ
Авт. рег
U
Y
ОУ
Рис. 4 Управление по задающему воздействию
V
ЗУ
const
Авт. рег
U
Y
ОУ
Рис. 5 Управление по возмущающему воздействию
САР, работающие по замкнутому циклу
(замкнутые системы)
V
Авт. рег
ЗУ
U
ОУ
Y
ОС
Рис. 6 Управление по отклонению
САР комбинированного управления
V
ЗУ
Авт. рег
U
ОУ
Y
ОС
Рис. 7 Управление по отклонению и возмущению
8.
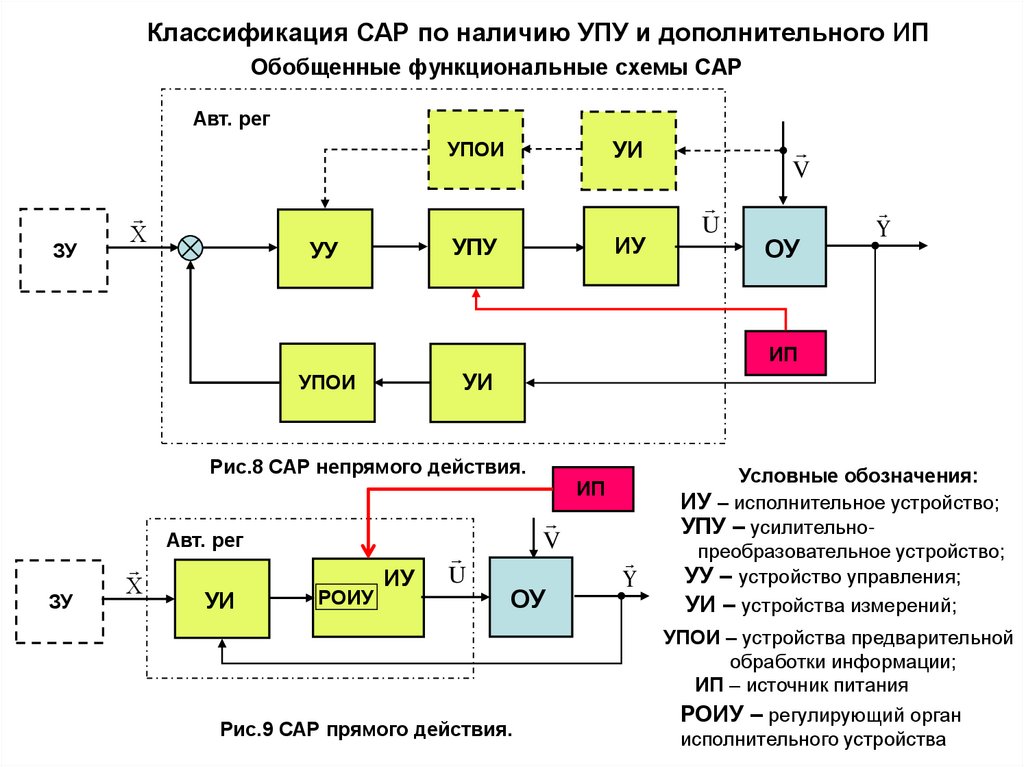
Классификация САР по наличию УПУ и дополнительного ИПОбобщенные функциональные схемы САР
Авт. рег
ЗУ
ИУ
УПУ
УУ
V
УИ
УПОИ
U
ОУ
Y
ИП
УИ
УПОИ
Рис.8 САР непрямого действия.
Авт. рег
ЗУ
УИ
РОИУ
ИУ
U
ИП
V
ОУ
Y
Условные обозначения:
ИУ – исполнительное устройство;
УПУ – усилительнопреобразовательное устройство;
УУ – устройство управления;
УИ – устройства измерений;
УПОИ – устройства предварительной
обработки информации;
ИП – источник питания
Рис.9 САР прямого действия.
РОИУ – регулирующий орган
исполнительного устройства
9. СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПРЯМОГО ДЕЙСТВИЯ
РЕГУЛЯТОР ПОЛЗУНОВАРЕГУЛЯТОР УАТТА
ВОДА
ПАР
ОН
Объект
нагрузк
и
Паровая
турбина
Масса
Центробежный
механизм
ДАТЧИК УРОВНЯ
Регулирующий
орган
Регулирующий
орган
ПАР
ТОПКА
Рис. 11
Рис. 10
10.
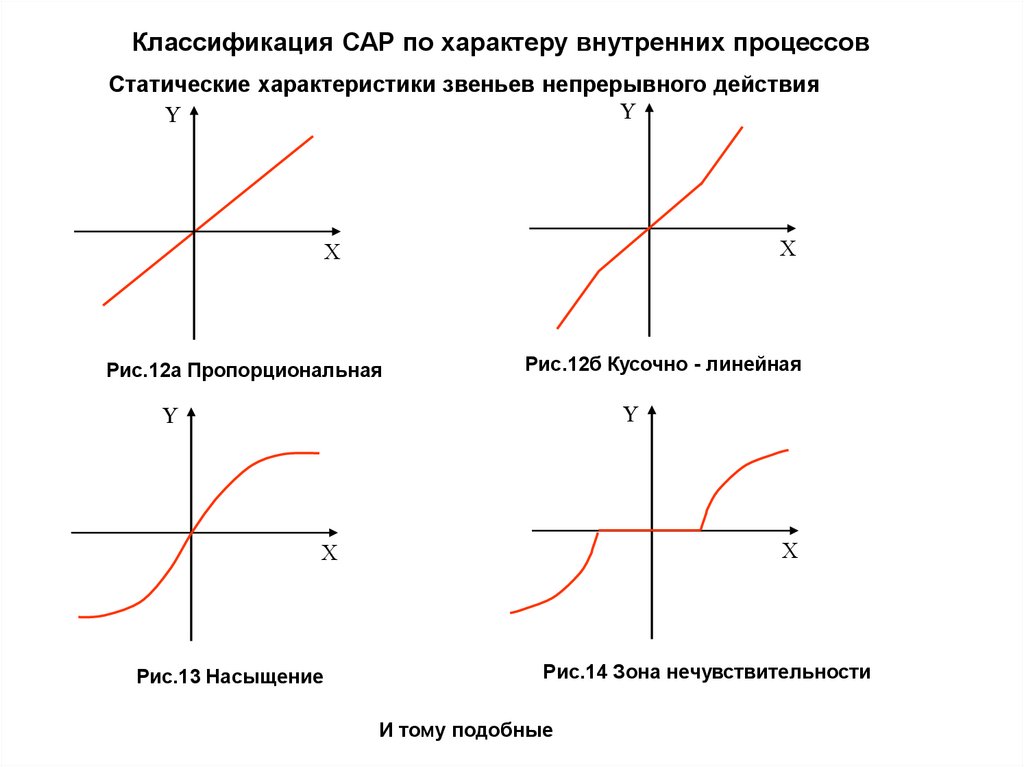
Классификация САР по характеру внутренних процессовСтатические характеристики звеньев непрерывного действия
Рис.12а Пропорциональная
Рис.12б Кусочно - линейная
Рис.13 Насыщение
Рис.14 Зона нечувствительности
И тому подобные
11.
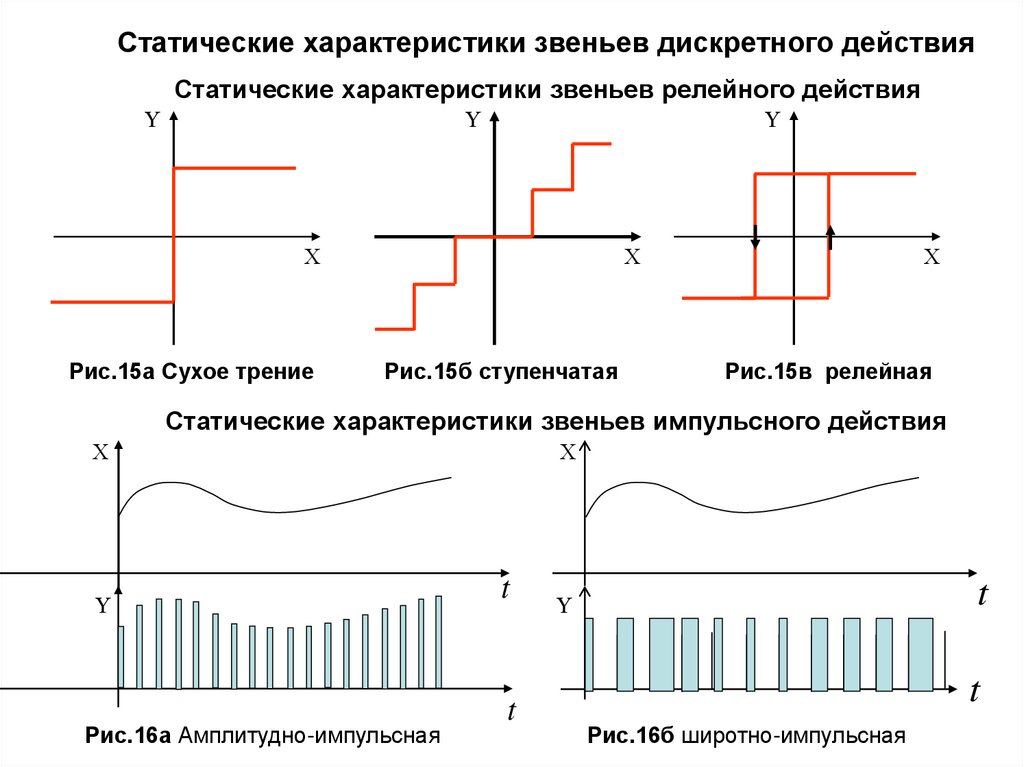
Статические характеристики звеньев дискретного действияСтатические характеристики звеньев релейного действия
Рис.15а Сухое трение
Рис.15б ступенчатая
Рис.15в релейная
Статические характеристики звеньев импульсного действия
Рис.16а Амплитудно-импульсная
t
t
t
t
Рис.16б широтно-импульсная
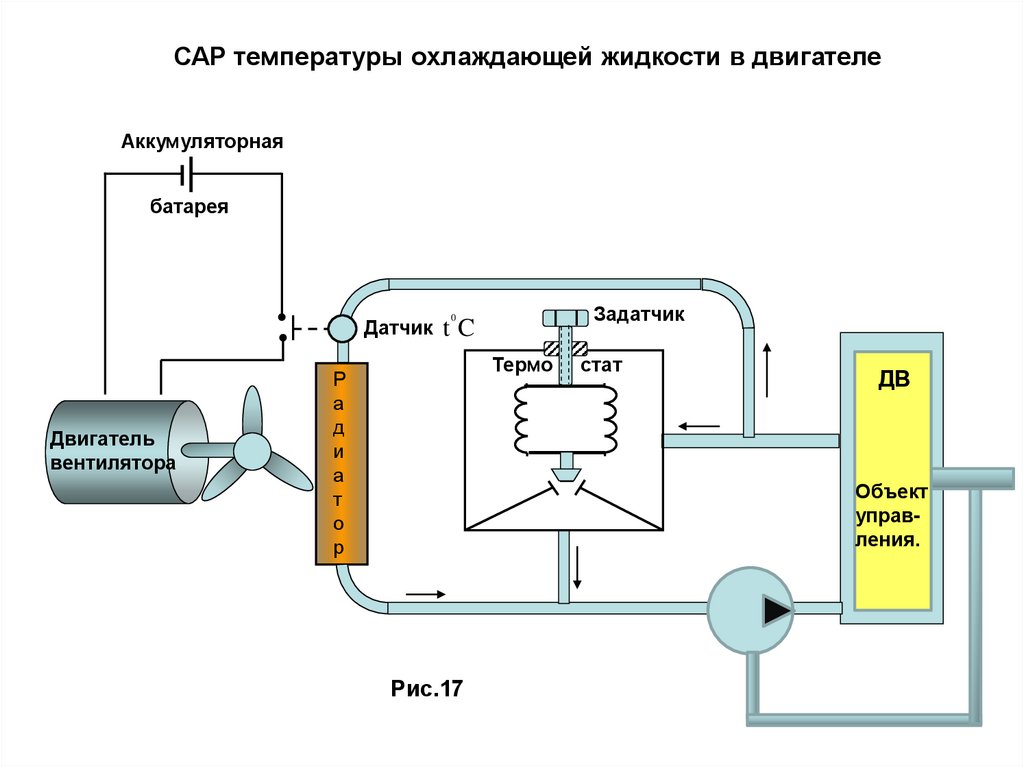
12.
САР температуры охлаждающей жидкости в двигателеАккумуляторная
батарея
Задатчик
0
Датчик t C
Двигатель
вентилятора
Термо
Р
а
д
и
а
т
о
р
стат
ДВ
Объект
управления.
Рис.17
13. Классификация приводов по схеме построения силовой части
Индивидуальный однодвигательный приводУУ
УМ
ИД
ИП
Привод, обеспечивающий движение одного
исполнительного органа рабочей машины,
(одного объекта управления (ОУ)
относительно одной оси с помощью одного
исполнительного двигателя)
Обобщенная схема силовой части такого
привода приведена на Рис.18.
Условные обозначения
МП
ОУ
Рис.18
УУ – устройство управления;
УМ – усилитель мощности;
ИП -- источник питания;
ИД – исполнительный двигатель;
МП – механическая передача;
ОУ – объект управления;
φ – регулируемая координата движения ОУ.
14.
Примеры использования индивидуальныходнодвигательных приводов в технических комплексах
Приводы выдвижения секций и подъема стрелы автокранов
Исполнительный
двигатель привода
подъема стрелы.
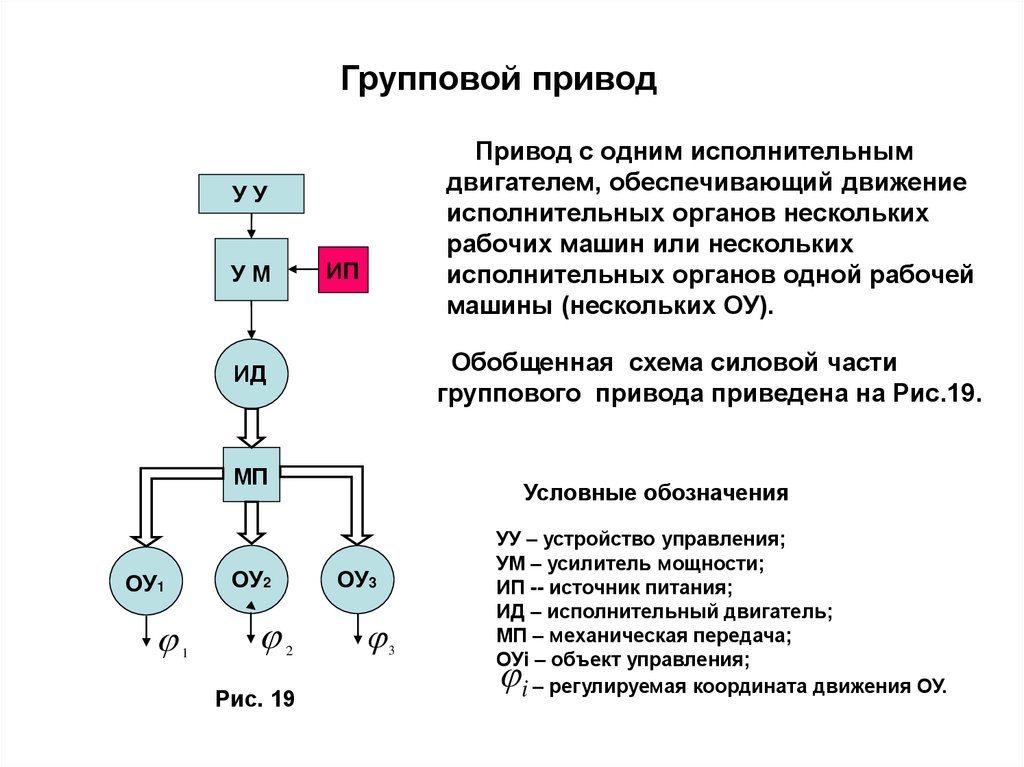
15.
Групповой приводПривод с одним исполнительным
двигателем, обеспечивающий движение
исполнительных органов нескольких
рабочих машин или нескольких
исполнительных органов одной рабочей
машины (нескольких ОУ).
УУ
ИП
УМ
Обобщенная схема силовой части
группового привода приведена на Рис.19.
ИД
МП
ОУ2
ОУ1
Условные обозначения
1
ОУ3
2
Рис. 19
3
УУ – устройство управления;
УМ – усилитель мощности;
ИП -- источник питания;
ИД – исполнительный двигатель;
МП – механическая передача;
ОУi – объект управления;
i – регулируемая координата движения ОУ.
16.
Пример группового привода - ходовая часть автомобилей17.
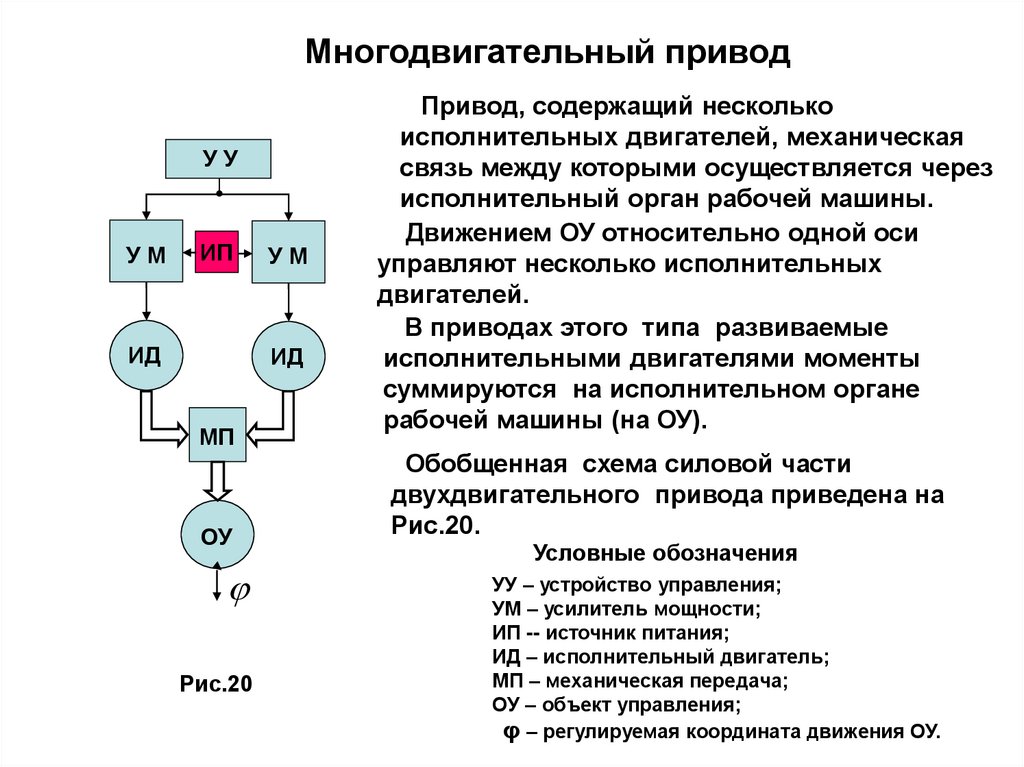
Многодвигательный приводУУ
УМ
ИП
ИД
УМ
ИД
МП
ОУ
Рис.20
Привод, содержащий несколько
исполнительных двигателей, механическая
связь между которыми осуществляется через
исполнительный орган рабочей машины.
Движением ОУ относительно одной оси
управляют несколько исполнительных
двигателей.
В приводах этого типа развиваемые
исполнительными двигателями моменты
суммируются на исполнительном органе
рабочей машины (на ОУ).
Обобщенная схема силовой части
двухдвигательного привода приведена на
Рис.20.
Условные обозначения
УУ – устройство управления;
УМ – усилитель мощности;
ИП -- источник питания;
ИД – исполнительный двигатель;
МП – механическая передача;
ОУ – объект управления;
φ – регулируемая координата движения ОУ.
18.
Примеры использования многодвигательного привода втехнических комплексах
Привод лестницы пожарных машин и машин МЧС
Исполнительные двигатели
двухдвигательного привода
подъема лестницы.
19.
Привод подъема стрелы экскаватораИсполнительные двигатели
двухдвигательного привода
подъема стрелы экскаватора.
20.
Экскаватор-погрузчик NEW HOLLAND B80BПриводы ковша и стрелы
Исполнительные двигатели
двухдвигательного привода
ковша погрузчика.
Исполнительные двигатели
двухдвигательного привода
стрелы погрузчика.
21.
Приводы поворота башен различных комплексовРоботизированные комплексы
22.
Приводы систем военной техники23.
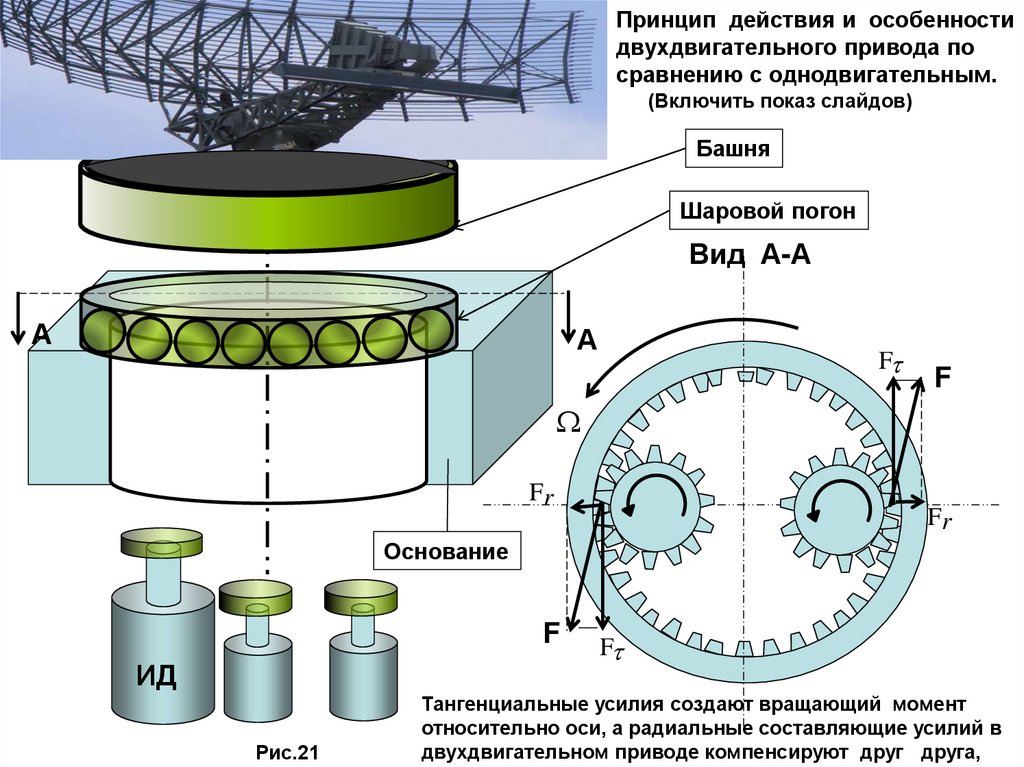
Принцип действия и особенностидвухдвигательного привода по
сравнению с однодвигательным.
(Включить показ слайдов)
Башня
Шаровой погон
Вид А-А
А
А
F
F
Fr
Fr
Основание
F
ИД
Рис.21
F
Тангенциальные усилия создают вращающий момент
относительно оси, а радиальные составляющие усилий в
двухдвигательном приводе компенсируют друг друга,
24.
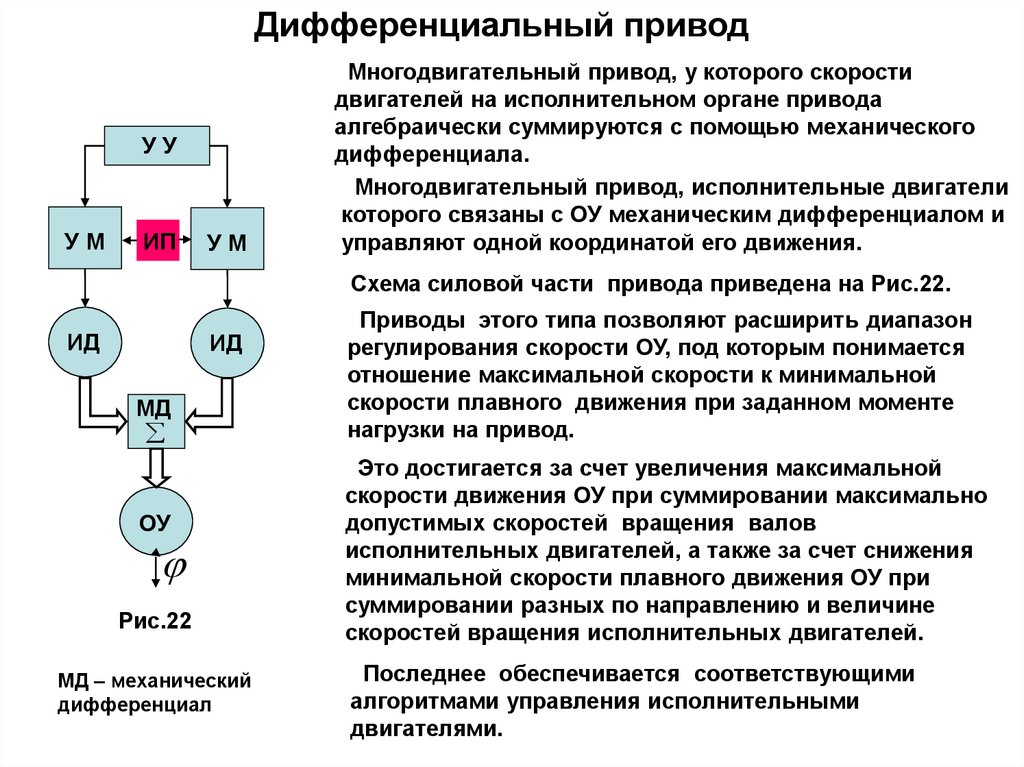
Дифференциальный приводУУ
УМ
ИП
УМ
Многодвигательный привод, у которого скорости
двигателей на исполнительном органе привода
алгебраически суммируются с помощью механического
дифференциала.
Многодвигательный привод, исполнительные двигатели
которого связаны с ОУ механическим дифференциалом и
управляют одной координатой его движения.
Схема силовой части привода приведена на Рис.22.
ИД
ИД
МД
ОУ
Рис.22
МД – механический
дифференциал
Приводы этого типа позволяют расширить диапазон
регулирования скорости ОУ, под которым понимается
отношение максимальной скорости к минимальной
скорости плавного движения при заданном моменте
нагрузки на привод.
Это достигается за счет увеличения максимальной
скорости движения ОУ при суммировании максимально
допустимых скоростей вращения валов
исполнительных двигателей, а также за счет снижения
минимальной скорости плавного движения ОУ при
суммировании разных по направлению и величине
скоростей вращения исполнительных двигателей.
Последнее обеспечивается соответствующими
алгоритмами управления исполнительными
двигателями.
25.
Примером применения дифференциального привода могут служить приводыантенных постов слежения, в которых нужно обеспечивать и очень малые и очень
большие скорости движения ОУ.
26.
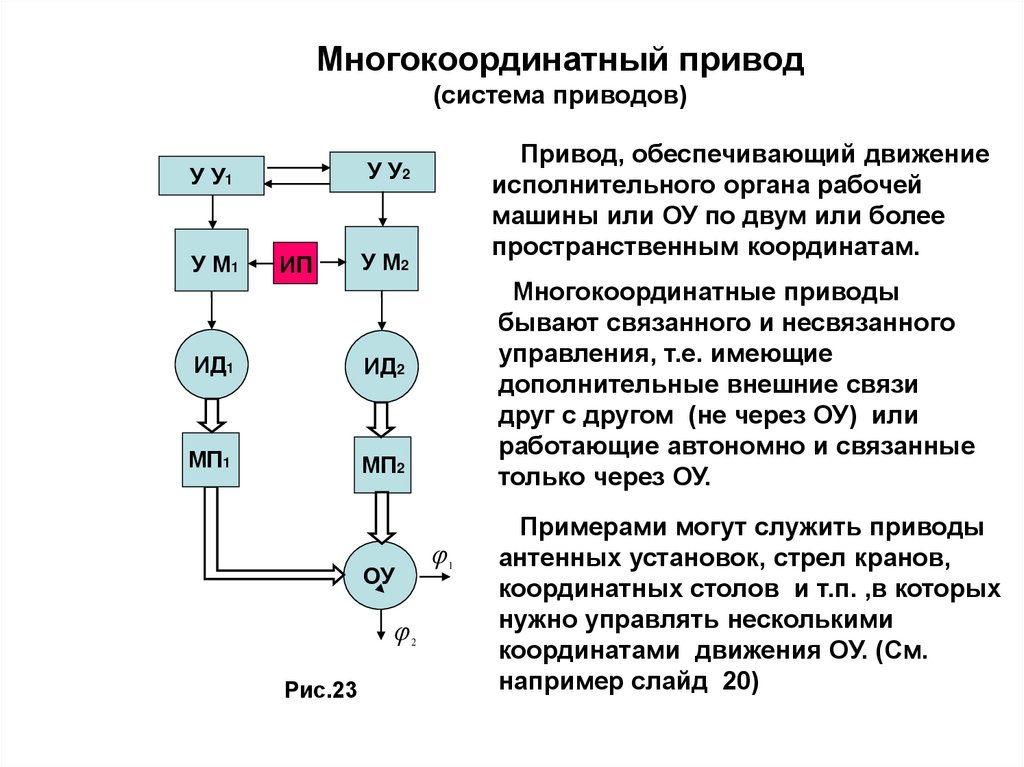
Многокоординатный привод(система приводов)
У У1
У М1
Привод, обеспечивающий движение
исполнительного органа рабочей
машины или ОУ по двум или более
пространственным координатам.
У У2
ИП
У М2
ИД1
ИД2
МП1
МП2
Многокоординатные приводы
бывают связанного и несвязанного
управления, т.е. имеющие
дополнительные внешние связи
друг с другом (не через ОУ) или
работающие автономно и связанные
только через ОУ.
ОУ
Рис.23
2
1
Примерами могут служить приводы
антенных установок, стрел кранов,
координатных столов и т.п. ,в которых
нужно управлять несколькими
координатами движения ОУ. (См.
например слайд 20)
27.
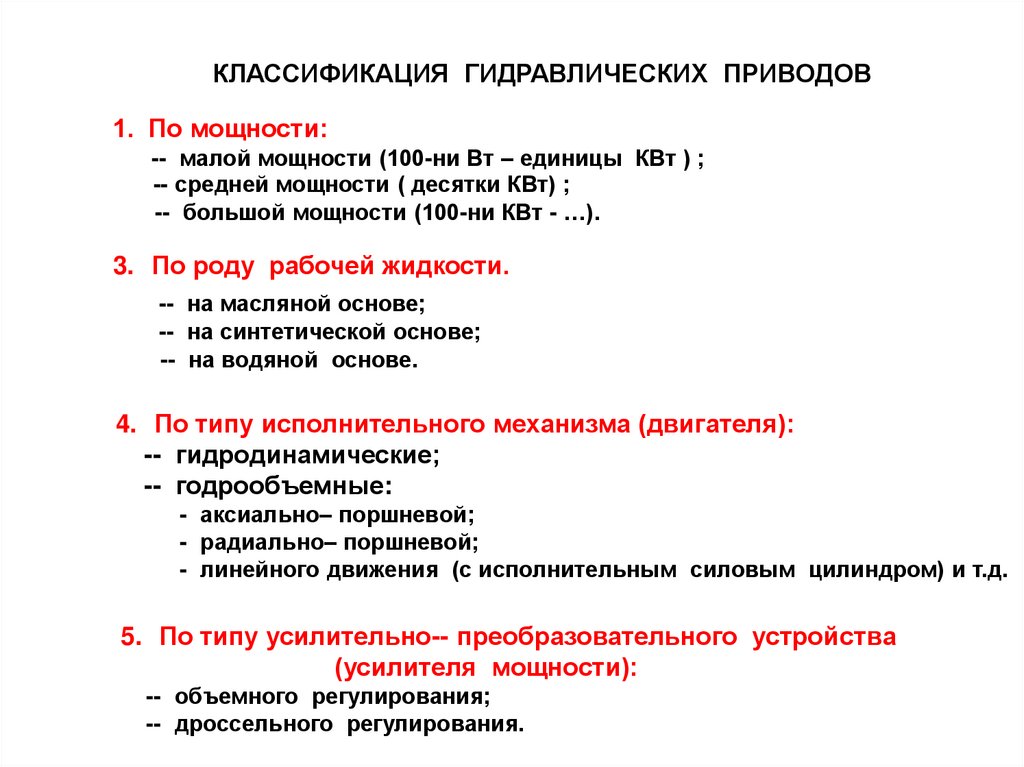
КЛАССИФИКАЦИЯ ГИДРАВЛИЧЕСКИХ ПРИВОДОВ1. По мощности:
-- малой мощности (100-ни Вт – единицы КВт ) ;
-- средней мощности ( десятки КВт) ;
-- большой мощности (100-ни КВт - …).
3. По роду рабочей жидкости.
-- на масляной основе;
-- на синтетической основе;
-- на водяной основе.
4. По типу исполнительного механизма (двигателя):
-- гидродинамические;
-- годрообъемные:
- аксиально– поршневой;
- радиально– поршневой;
- линейного движения (с исполнительным силовым цилиндром) и т.д.
5. По типу усилительно-- преобразовательного устройства
(усилителя мощности):
-- объемного регулирования;
-- дроссельного регулирования.
28.
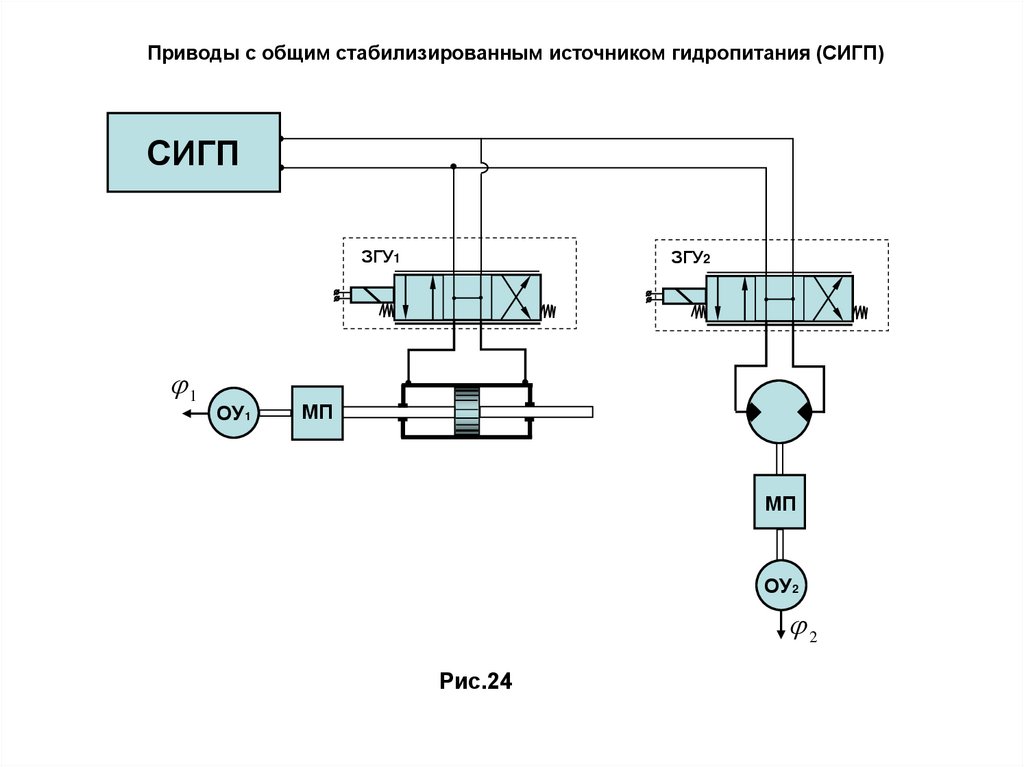
Приводы с общим стабилизированным источником гидропитания (СИГП)СИГП
ЗГУ1
1
ОУ1
ЗГУ2
МП
МП
ОУ2
2
Рис.24
29.
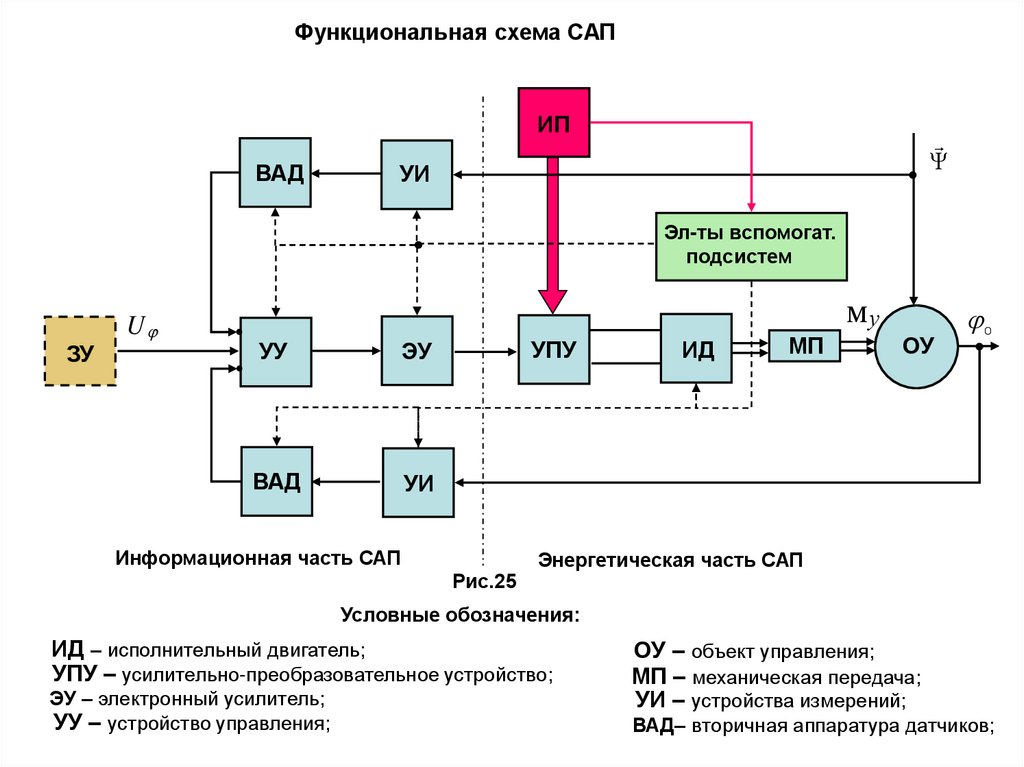
Функциональная схема САПИП
ВАД
УИ
Эл-ты вспомогат.
подсистем
ЗУ
U
му
УУ
ЭУ
ВАД
УИ
УПУ
Информационная часть САП
Рис.25
ИД
МП
ОУ
О
Энергетическая часть САП
Условные обозначения:
ИД – исполнительный двигатель;
УПУ – усилительно-преобразовательное устройство;
ЭУ – электронный усилитель;
УУ – устройство управления;
ОУ – объект управления;
МП – механическая передача;
УИ – устройства измерений;
ВАД– вторичная аппаратура датчиков;
30.
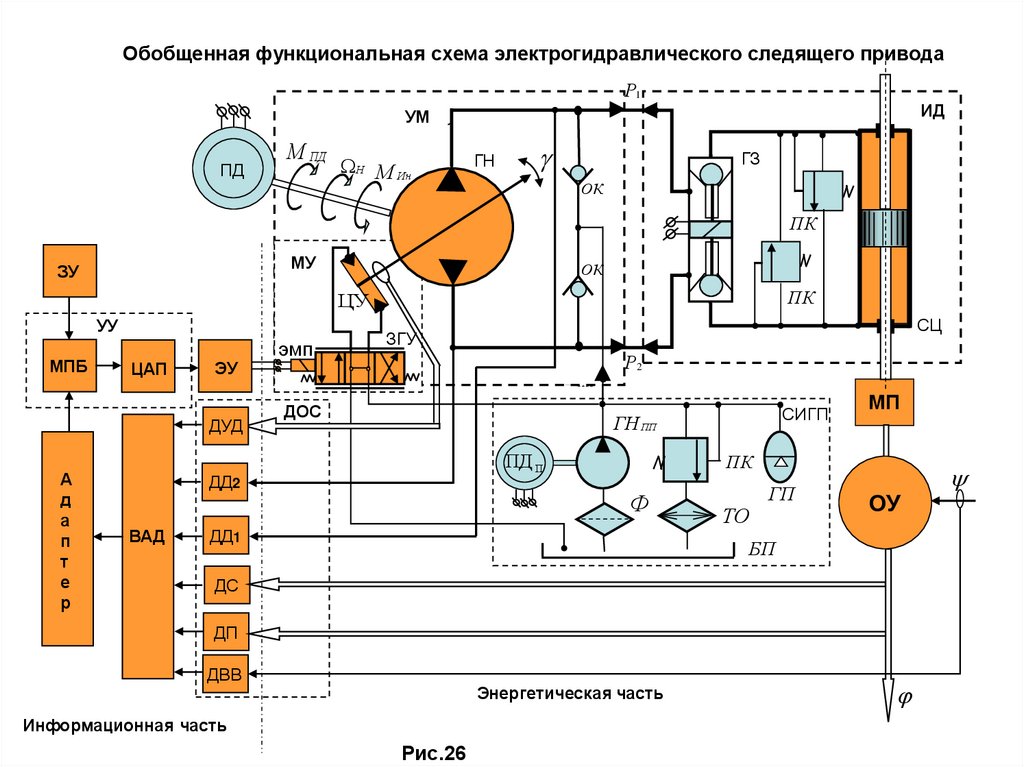
Обобщенная функциональная схема электрогидравлического следящего приводаР1
ПД
М ПД
Н М Ин
ГН
ИД
с
с
УМ
ГЗ
ок
ПК
МУ
ЗУ
ок
ПК
ЦУ
ЦАП
ЭУ
ДУД
А
д
а
п
т
е
р
эмп
РПП с
ДОС
Р2
СИГП
ГН ПП
ПД П
ДД2
ВАД
с
МПБ
СЦ
ЗГУ
с
УУ
МП
ПК
Ф
ДД1
ТО
ГП
ОУ
БП
ДС
ДП
ДВВ
Энергетическая часть
Информационная часть
Рис.26
31.
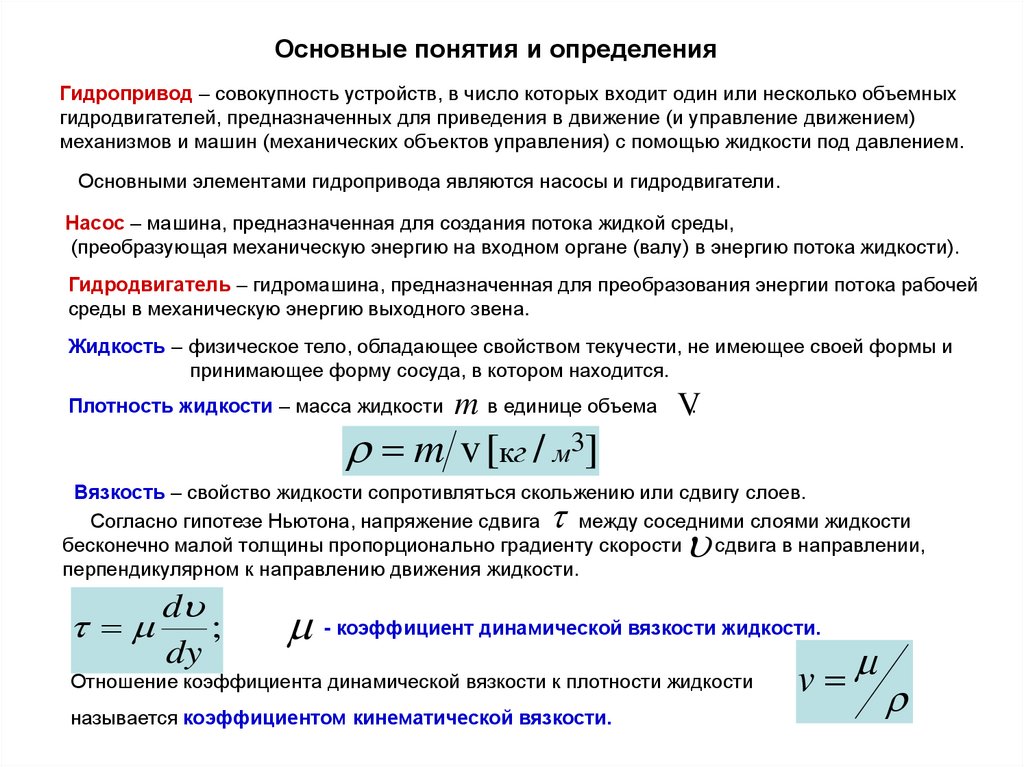
Основные понятия и определенияГидропривод – совокупность устройств, в число которых входит один или несколько объемных
гидродвигателей, предназначенных для приведения в движение (и управление движением)
механизмов и машин (механических объектов управления) с помощью жидкости под давлением.
Основными элементами гидропривода являются насосы и гидродвигатели.
Насос – машина, предназначенная для создания потока жидкой среды,
(преобразующая механическую энергию на входном органе (валу) в энергию потока жидкости).
Гидродвигатель – гидромашина, предназначенная для преобразования энергии потока рабочей
среды в механическую энергию выходного звена.
Жидкость – физическое тело, обладающее свойством текучести, не имеющее своей формы и
принимающее форму сосуда, в котором находится.
Плотность жидкости – масса жидкости
m в единице объема V.
m v [кг / м3]
Вязкость – свойство жидкости сопротивляться скольжению или сдвигу слоев.
Согласно гипотезе Ньютона, напряжение сдвига
между соседними слоями жидкости
бесконечно малой толщины пропорционально градиенту скорости
сдвига в направлении,
перпендикулярном к направлению движения жидкости.
d
;
dy
- коэффициент динамической вязкости жидкости.
Отношение коэффициента динамической вязкости к плотности жидкости
называется коэффициентом кинематической вязкости.
v
32.
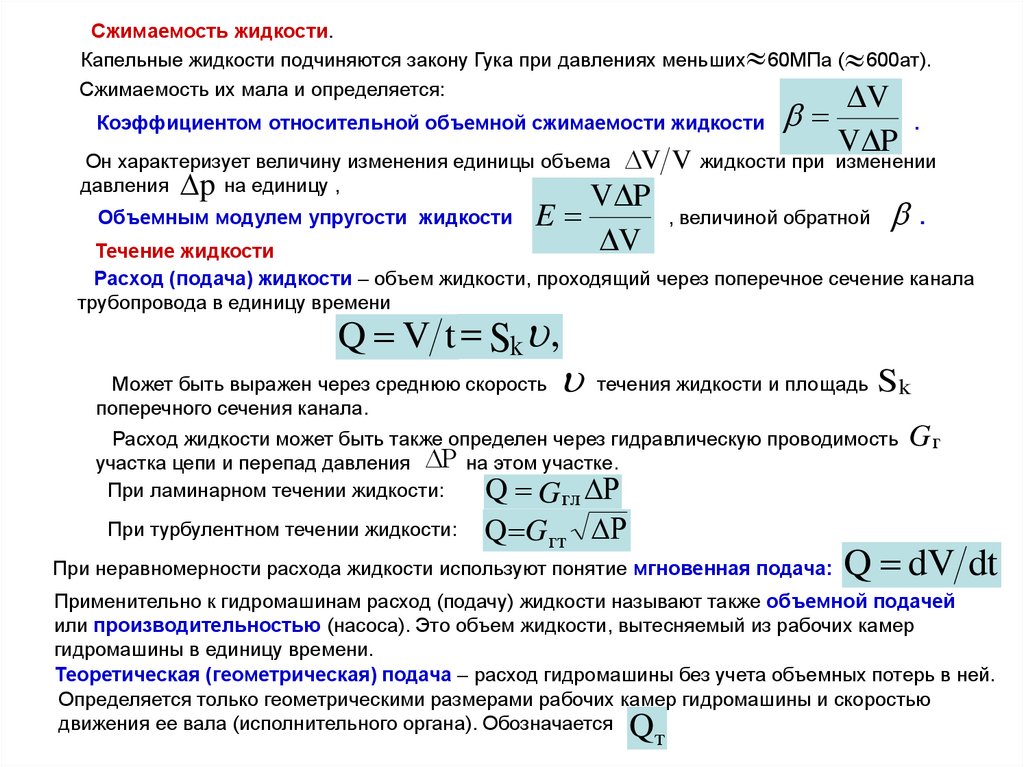
Сжимаемость жидкости.Капельные жидкости подчиняются закону Гука при давлениях меньших
Сжимаемость их мала и определяется:
60МПа ( 600ат).
Коэффициентом относительной объемной сжимаемости жидкости
V
.
V P
Он характеризует величину изменения единицы объема V V жидкости при изменении
давления p на единицу ,
Объемным модулем упругости жидкости
E
V P
, величиной обратной .
V
Течение жидкости
Расход (подача) жидкости – объем жидкости, проходящий через поперечное сечение канала
трубопровода в единицу времени
Q V t Sk ,
Может быть выражен через среднюю скорость
поперечного сечения канала.
течения жидкости и площадь Sk
Расход жидкости может быть также определен через гидравлическую проводимость G г
участка цепи и перепад давления Р на этом участке.
При ламинарном течении жидкости:
Q Gгл Р
При турбулентном течении жидкости:
Q G гт Р
При неравномерности расхода жидкости используют понятие мгновенная подача:
Q dV dt
Применительно к гидромашинам расход (подачу) жидкости называют также объемной подачей
или производительностью (насоса). Это объем жидкости, вытесняемый из рабочих камер
гидромашины в единицу времени.
Теоретическая (геометрическая) подача – расход гидромашины без учета объемных потерь в ней.
Определяется только геометрическими размерами рабочих камер гидромашины и скоростью
движения ее вала (исполнительного органа). Обозначается
.
Qт
33.
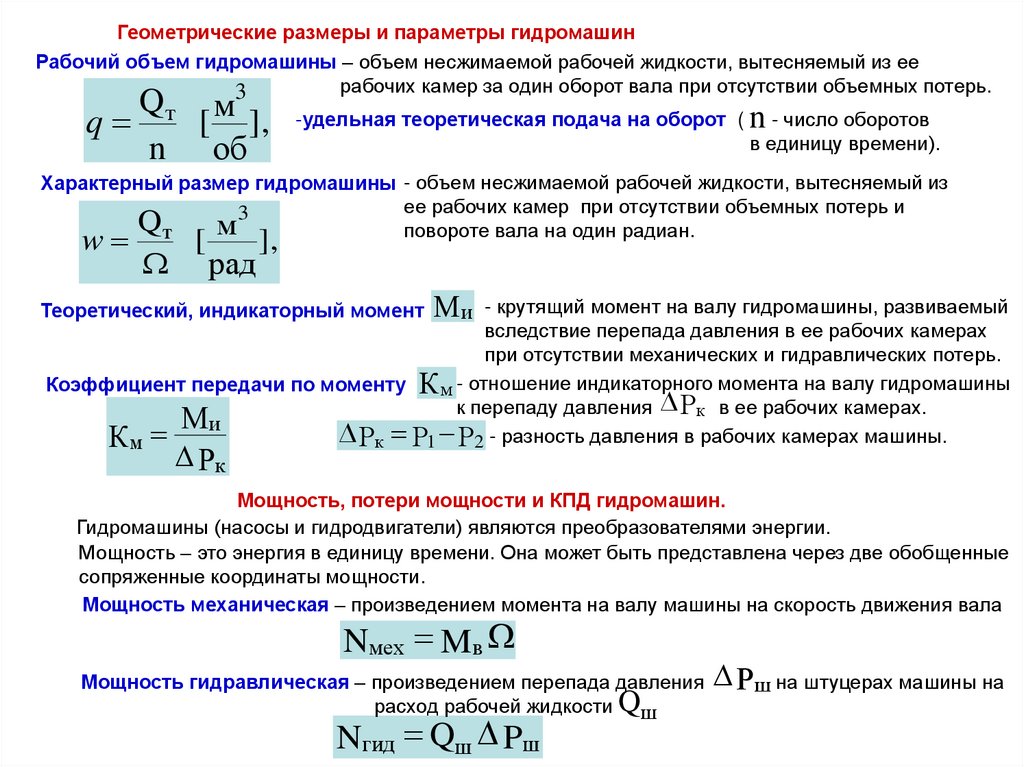
Геометрические размеры и параметры гидромашинРабочий объем гидромашины – объем несжимаемой рабочей жидкости, вытесняемый из ее
рабочих камер за один оборот вала при отсутствии объемных потерь.
3
Qт м
q
[ ],
n об
-удельная теоретическая подача на оборот (
n - число оборотов
в единицу времени).
Характерный размер гидромашины - объем несжимаемой рабочей жидкости, вытесняемый из
ее рабочих камер при отсутствии объемных потерь и
Q т м3
повороте вала на один радиан.
w
[
рад
],
Теоретический, индикаторный момент М и - крутящий момент на валу гидромашины, развиваемый
вследствие перепада давления в ее рабочих камерах
при отсутствии механических и гидравлических потерь.
Коэффициент передачи по моменту К м - отношение индикаторного момента на валу гидромашины
к перепаду давления Рк в ее рабочих камерах.
М
и
Рк Р1 Р2 - разность давления в рабочих камерах машины.
Км
Рк
Мощность, потери мощности и КПД гидромашин.
Гидромашины (насосы и гидродвигатели) являются преобразователями энергии.
Мощность – это энергия в единицу времени. Она может быть представлена через две обобщенные
сопряженные координаты мощности.
Мощность механическая – произведением момента на валу машины на скорость движения вала
Nмех Mв
Мощность гидравлическая – произведением перепада давления Рш на штуцерах машины на
расход рабочей жидкости Qш
Nгид Qш Pш
34.
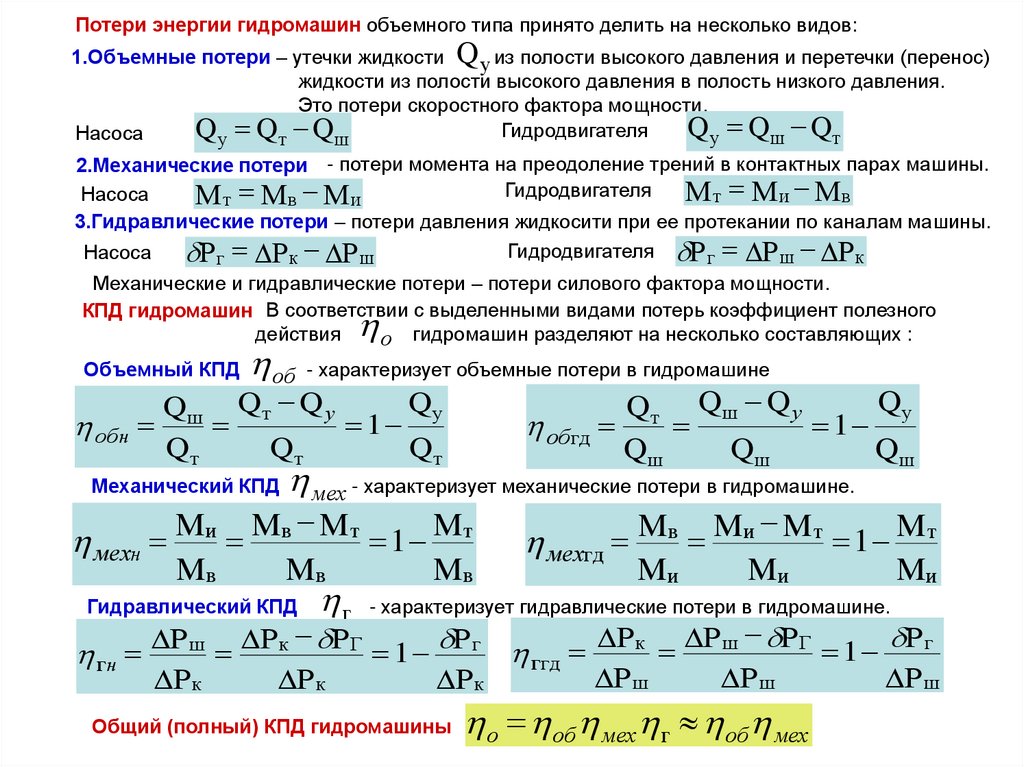
Потери энергии гидромашин объемного типа принято делить на несколько видов:1.Объемные потери – утечки жидкости Q у из полости высокого давления и перетечки (перенос)
жидкости из полости высокого давления в полость низкого давления.
Это потери скоростного фактора мощности.
Qу Qш Qт
Гидродвигателя
Qу Qт Qш
Насоса
2.Механические потери - потери момента на преодоление трений в контактных парах машины.
Гидродвигателя
М т Ми Мв
Насоса
М т Мв Ми
3.Гидравлические потери – потери давления жидкосити при ее протекании по каналам машины.
Гидродвигателя Рг Рш Рк
Насоса
Рг Рк Рш
Механические и гидравлические потери – потери силового фактора мощности.
КПД гидромашин В соответствии с выделенными видами потерь коэффициент полезного
действия
о гидромашин разделяют на несколько составляющих :
Объемный КПД
об - характеризует объемные потери в гидромашине
Qу
Qт Qш Q у
1
обгд
Qш
Qш
Qш
Qу
Qш Qт Q у
1
обн
Qт
Qт
Qт
Механический КПД
мех - характеризует механические потери в гидромашине.
мехн Ми Мв М т 1 М т
Мв
Мв
Гидравлический КПД
Мв
Мв Ми М т 1 М т
мехгд
Ми
Ми
Ми
г - характеризует гидравлические потери в гидромашине.
Р
Р
Р
Р
Р
к
ш РГ
ш
к РГ
г
1 Рг
ггд
1
гн
Рш
Рш
Рш
Рк
Рк
Рк
Общий (полный) КПД гидромашины
о об мех г об мех
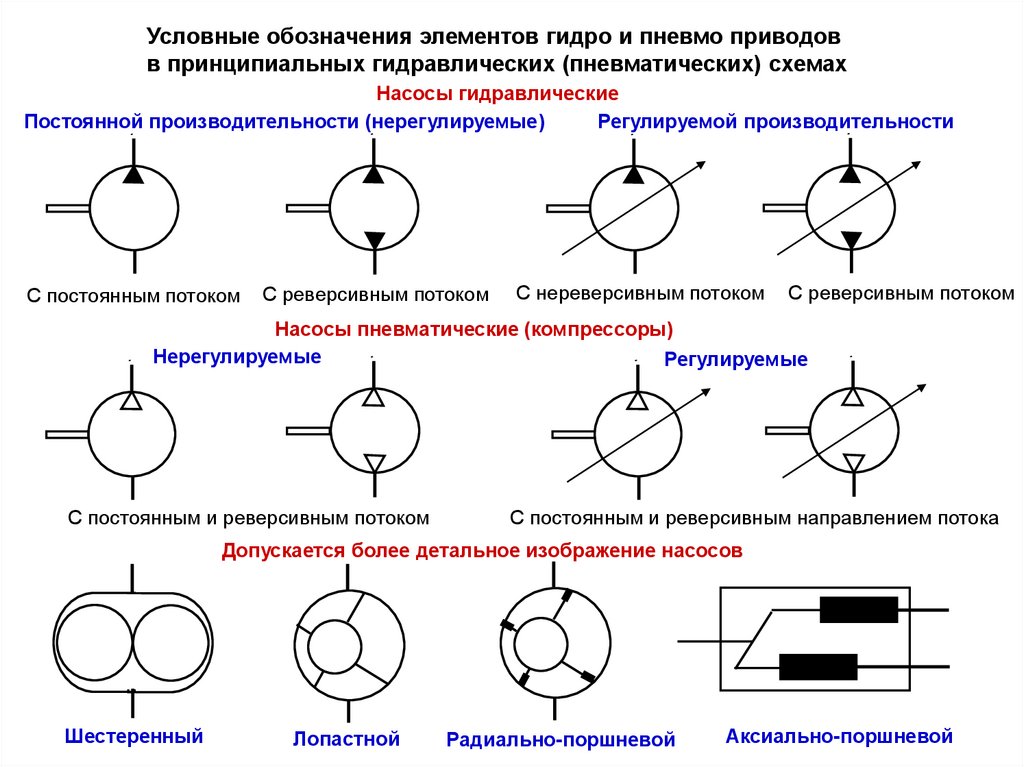
35.
Условные обозначения элементов гидро и пневмо приводовв принципиальных гидравлических (пневматических) схемах
Насосы гидравлические
Регулируемой производительности
Постоянной производительности (нерегулируемые)
С постоянным потоком
С реверсивным потоком
С нереверсивным потоком
С реверсивным потоком
Насосы пневматические (компрессоры)
Нерегулируемые
Регулируемые
С постоянным и реверсивным потоком
С постоянным и реверсивным направлением потока
Допускается более детальное изображение насосов
Шестеренный
Лопастной
Радиально-поршневой
Аксиально-поршневой
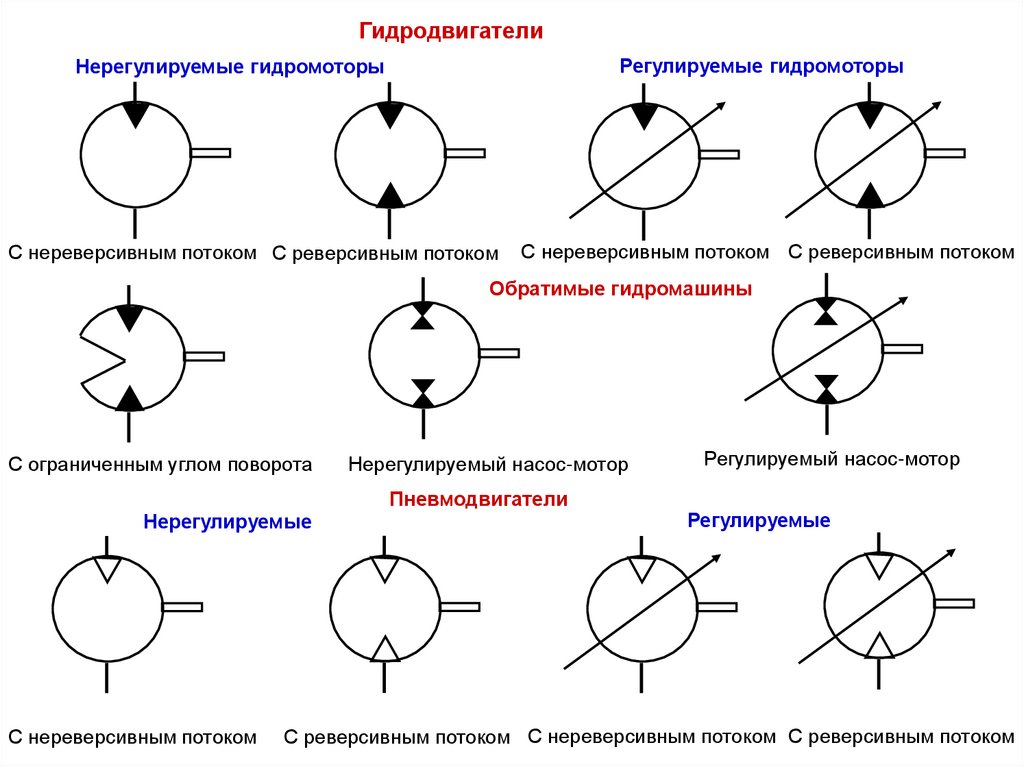
36.
ГидродвигателиРегулируемые гидромоторы
Нерегулируемые гидромоторы
С нереверсивным потоком С реверсивным потоком
С нереверсивным потоком С реверсивным потоком
Обратимые гидромашины
С ограниченным углом поворота
Нерегулируемый насос-мотор
Пневмодвигатели
Нерегулируемые
С нереверсивным потоком
Регулируемый насос-мотор
Регулируемые
С реверсивным потоком С нереверсивным потоком С реверсивным потоком
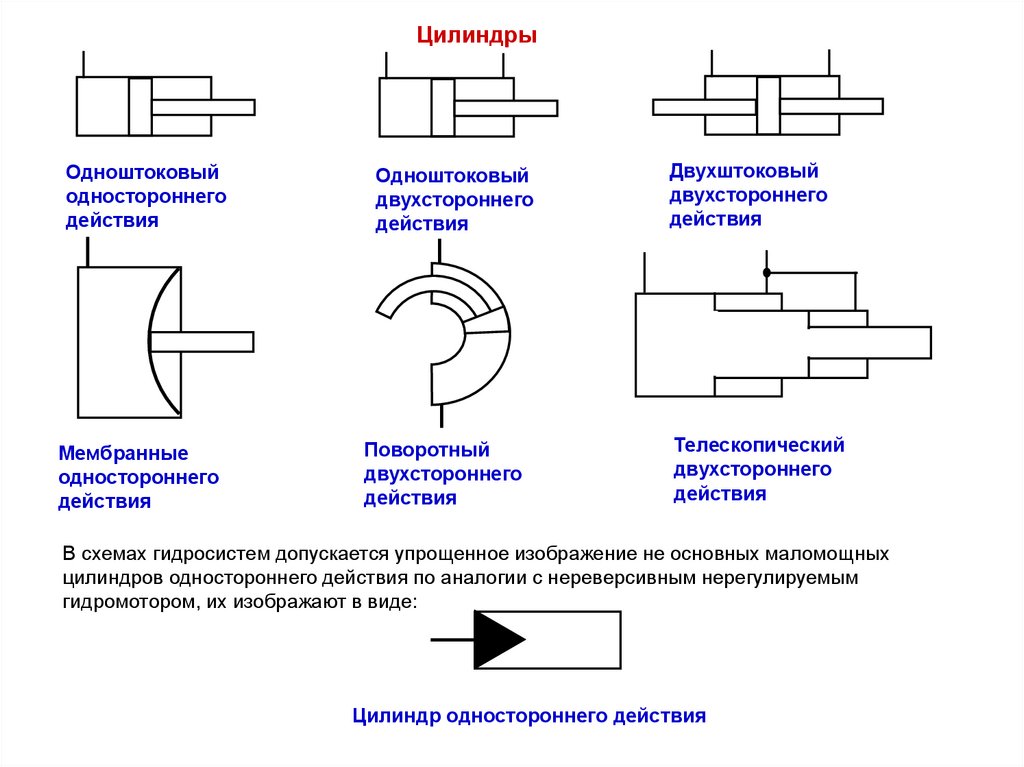
37.
ЦилиндрыОдноштоковый
одностороннего
действия
Одноштоковый
двухстороннего
действия
Двухштоковый
двухстороннего
действия
Мембранные
одностороннего
действия
Поворотный
двухстороннего
действия
Телескопический
двухстороннего
действия
В схемах гидросистем допускается упрощенное изображение не основных маломощных
цилиндров одностороннего действия по аналогии с нереверсивным нерегулируемым
гидромотором, их изображают в виде:
Цилиндр одностороннего действия
38.
Распределительные элементы (распределители)В схемах распределителей рабочую позицию подвижного элемента изображают квадратом, а число
позиций – числом квадратов.
На исходной позиции указывают число ходов (подводимых гидравлических или пневматических линий).
Внутри квадратов стрелками изображают соединение линий (ходов) и направление потока жидкости
(газа) в каждой позиции. Закрытый ход в позиции изображают отрезком перпендикулярной линии.
Существуют распределители дискретного действия (с дискретным
переключением позиций) и непрерывного действия (с бесконечным
множеством промежуточных положений). Последние изображаются с
двумя параллельными линиями.
Переключение позиций может осуществляться: - вручную,
- электромагнитным преобразователем,
- гидравлическим преобразователем.
Распределители часто оснащены пружинами
возврата в исходную позицию.
В исходном положении распределители могут соединять все ходы (гидро или пневмолинии)
или отсекать их друг от друга.
В первом случае распределитель называют с начальным
протоком или с отрицательным перекрытием и изображают так:
Во втором случае распределитель называют без начального
протока или с положительным перекрытием и изображают так:
39.
Примеры условных обозначений распределителейДвухпозиционный, двухходовой, дискретного действия с
ручным управлением и пружиной возврата
Двухпозиционный, трехходовой, непрерывного действия с
управлением от двух электромагнитных преобразователей
Трехпозиционный, трехходовой, дискретного действия с
начальным протоком, с управлением от гидравлического
преобразователя, с центрирующими пружинами.
Трехпозиционный, четырехходовой, четырехщелевой, с
положительным перекрытием, непрерывного действия с
управлением от электромагнитного преобразователя.
с
с
Трехпозиционный, четырехходовой, четырехщелевой, с
отрицательным перекрытием, непрерывного действия, с
управлением от электромагнитного преобразователя и с
обратной связью по перепаду давления на выходе.
Р1
Р2
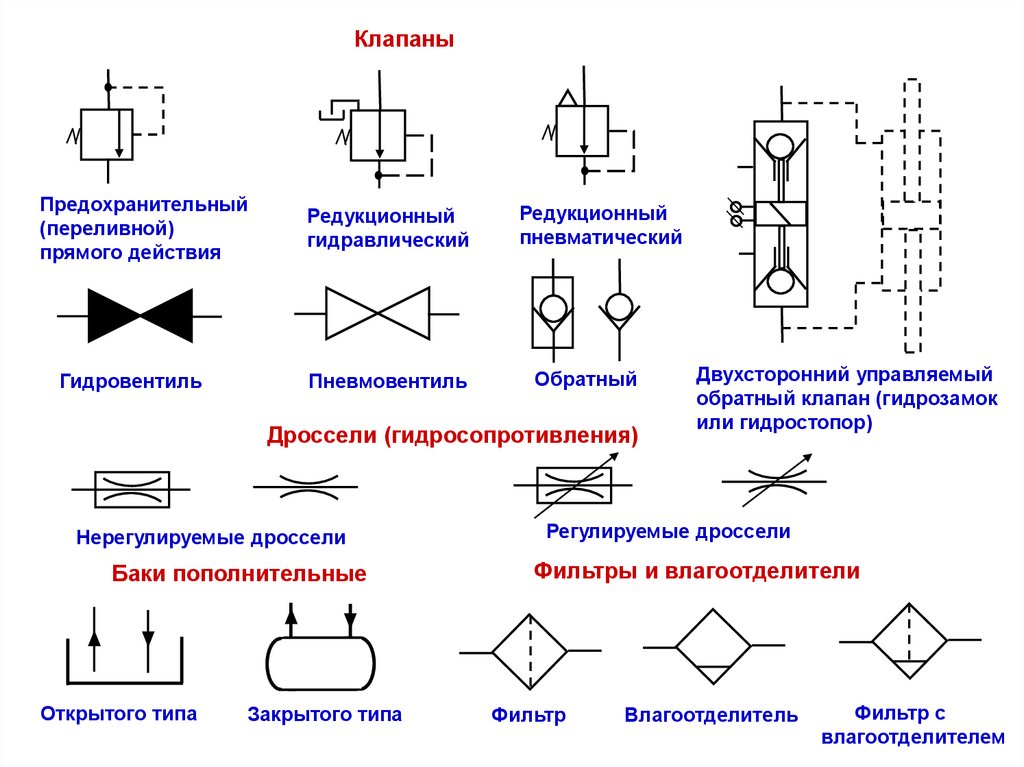
40.
КлапаныПредохранительный
(переливной)
прямого действия
Редукционный
гидравлический
Гидровентиль
Пневмовентиль
Редукционный
пневматический
Обратный
Дроссели (гидросопротивления)
Нерегулируемые дроссели
Баки пополнительные
Открытого типа
Закрытого типа
Двухсторонний управляемый
обратный клапан (гидрозамок
или гидростопор)
Регулируемые дроссели
Фильтры и влагоотделители
Фильтр
Влагоотделитель
Фильтр с
влагоотделителем
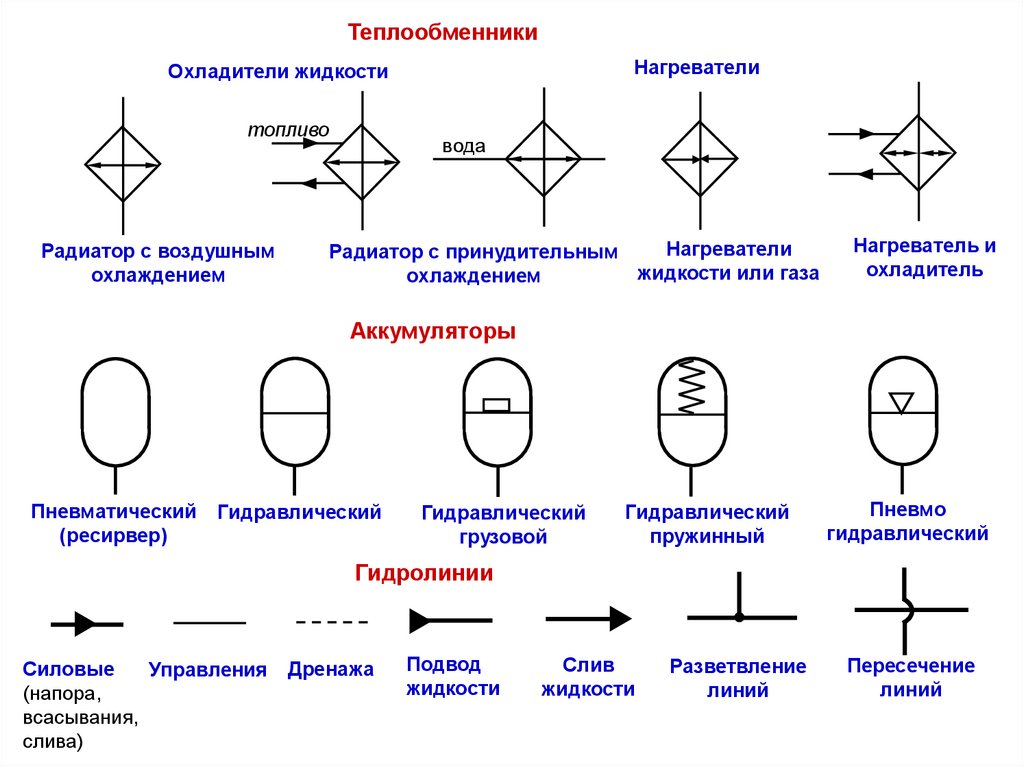
41.
ТеплообменникиНагреватели
Охладители жидкости
топливо
Радиатор с воздушным
охлаждением
вода
Нагреватели
Радиатор с принудительным
жидкости или газа
охлаждением
Нагреватель и
охладитель
Аккумуляторы
Пневматический
(ресирвер)
Гидравлический
Гидравлический
грузовой
Гидравлический
пружинный
Пневмо
гидравлический
Гидролинии
Силовые
Управления
(напора,
всасывания,
слива)
Дренажа
Подвод
жидкости
Слив
жидкости
Разветвление
линий
Пересечение
линий
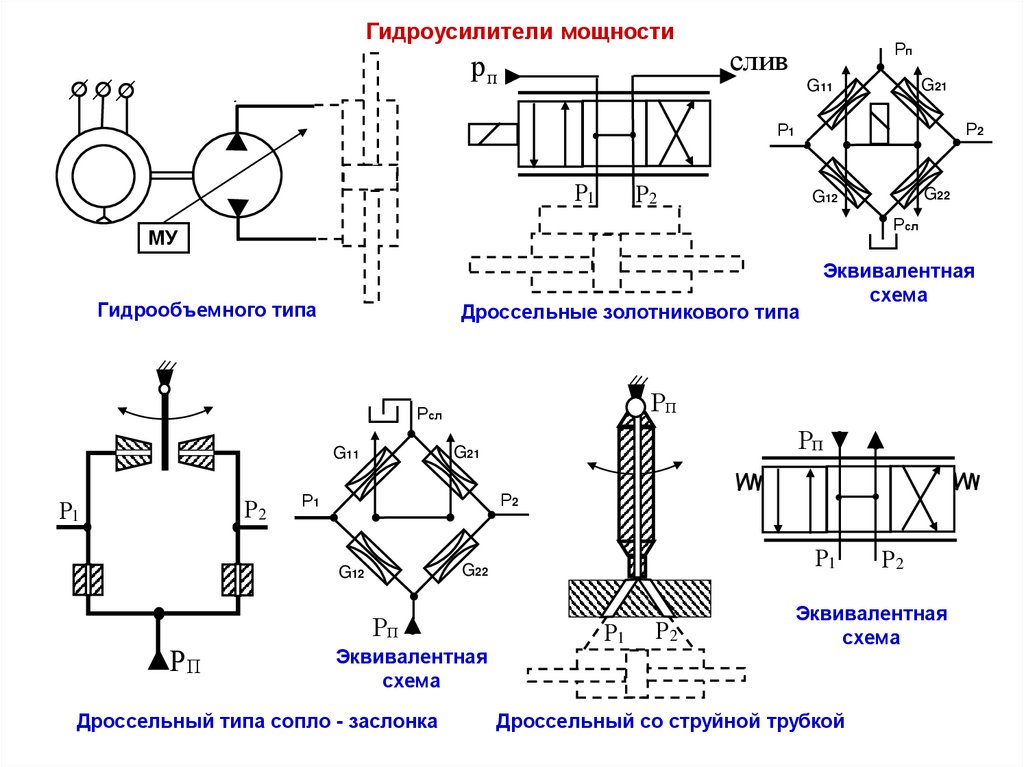
42.
Гидроусилители мощностирп
Рп
слив
G21
G11
Р2
Р1
Р1
Р2
G22
G12
Рсл
МУ
Дроссельные золотникового типа
РП
Рсл
Р2
Р1
Р1
G22
РП с
РП
с
Р2
Р1
G12
с
РП
G21
G11
с
Гидрообъемного типа
Эквивалентная
схема
Эквивалентная
схема
Дроссельный типа сопло - заслонка
Р1
Р2
Р2
Эквивалентная
схема
Дроссельный со струйной трубкой
43.
Основные параметры гидромашинДопущения
В гидроприводе отсутствуют:
- объемные потери;
- механические и гидравлические потери;
- сжимаемость жидкости;
- зазоры (люфты) в механических передачах.
rб
ГН
r1
МД
ПД
F1
Силовые соотношения и параметры гидромашин
В уравновешенном состоянии:
МG
F2
М 2- момент на валу ГД, при принятых допущениях:
Ми2 r 2 F2 , r 2 S п2 ( Р 21 Р 22 ), r 2 S п2 P 2 ,
ГБ
Fи2 Sп2 (Р21 Р22)
М2
ГД
М2 МG rбG
( D 22 d 22 )
- эффективная площадь поршня ГД,
S п2
4
Р 21 Р 22 P 2 - перепад давления в СЦ ГД.
r2
На основании закона Паскаля:
М1
Р 11
Р 12
d1
D1
- индикаторное усилие на
штоке СЦ ГД,
Р 21
Р 22
d2
D2
Рис.27 Схема гидропривода
Условные обозначения
ПД – приводной двигатель; ГН – гидронасос;
ГД – гидродвигатель;
ГБ – грузовой барабан;
G – груз.
Р 21 Р11 P1;
Р 22 Р12 P 2 ;
Р11 Р12 P1; Р 2 Р1 P ;
G
S п1
Fи1 - индикаторное усилие на штоке СЦ ГН:
Fи1 Sп1 (Р11 Р12) Sп1 Р ,
2
(D1 d 12 )
- эффективная площадь поршня ГН,
4
М и1- индикаторный момент на валу гидронасоса.
Ми1 r1 F1 r1Sп1 (Р11 Р12) r1Sп1 P1 ,
Основные силовые параметры гидромашин:
Ми1
Sп1 r1 Км1 -коэффициент передачи по моменту ГН,
удельный момент на валу ГН на ед. Р
Р1
Ми2
Sп2 r 2 Км2 -коэффициент передачи по моменту ГД,
удельный момент на валу ГМ на ед. Р
Р2
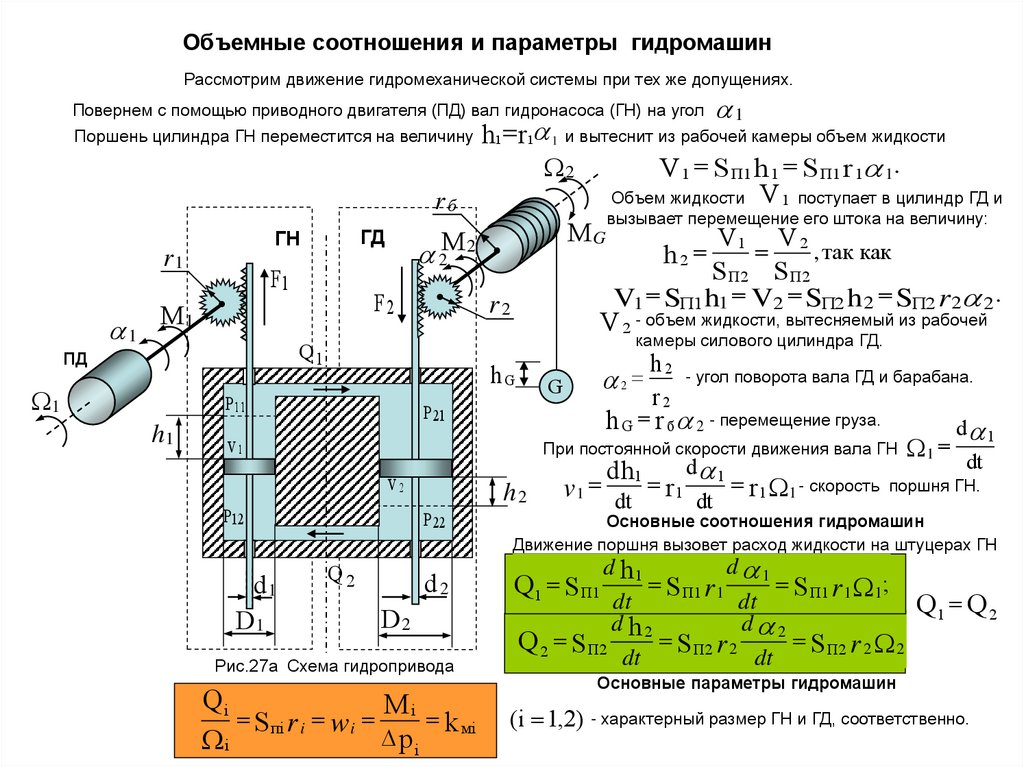
44.
Объемные соотношения и параметры гидромашинРассмотрим движение гидромеханической системы при тех же допущениях.
Повернем с помощью приводного двигателя (ПД) вал гидронасоса (ГН) на угол
1.
Поршень цилиндра ГН переместится на величину 1
1 1 и вытеснит из рабочей камеры объем жидкости
h r
V1 S П1 h 1 S П1 r 1 1.
Объем жидкости V 1 поступает в цилиндр ГД и
2
rб
1
ГД
ГН
r1
F1
r2
1
hG
Р 11
h1
h2
2 - угол поворота вала ГД и барабана.
r2
h G r б 2 - перемещение груза.
d 1
G
Р 21
При постоянной скорости движения вала ГН 1
v1
v2
Р 12
d1
D1
h2
камеры силового цилиндра ГД.
Q1
ПД
вызывает перемещение его штока на величину:
V 1 V 2 , так как
S П2 S П2
V1 SП1 h1 V2 SП2 h2 SП2 r 2 2 .
V 2 - объем жидкости, вытесняемый из рабочей
2М 2
F2
М1
МG
Q2
h2
dt
d 1
dh
1
v 1 dt r 1 dt r 1 1 - скорость поршня ГН.
Р 22
Основные соотношения гидромашин
Движение поршня вызовет расход жидкости на штуцерах ГН
d2
Q1 S П1
D2
Рис.27а Схема гидропривода
Qi
Мi
S пi r i w i
k мi
pi
i
d 1
d h1
S П1 r 1
S П1 r 1 1 ;
dt
dt
Q1 Q 2
d 2
d h2
S П2 r 2
S П2 r 2 2
Q 2 S П2
dt
dt
Основные параметры гидромашин
(i 1,2) - характерный размер ГН и ГД, соответственно.
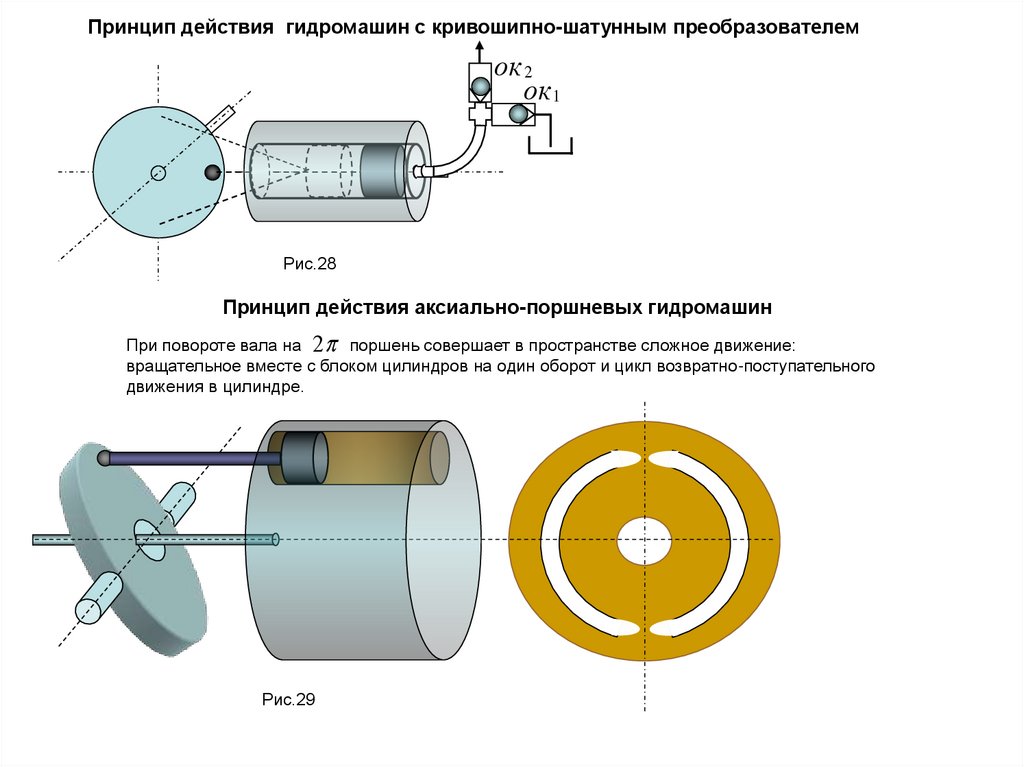
45.
Принцип действия гидромашин с кривошипно-шатунным преобразователемок 2
ок 1
Рис.28
Принцип действия аксиально-поршневых гидромашин
При повороте вала на 2 поршень совершает в пространстве сложное движение:
вращательное вместе с блоком цилиндров на один оборот и цикл возвратно-поступательного
движения в цилиндре.
Рис.29
46.
Основные соотношения и параметры аксиально-поршневых гидромашинДопущения
В гидромашине отсутствуют:
- объемные потери;
- механические и гидравлические потери;
- сжимаемость жидкости;
-зазоры (люфты) в механических передачах;
-качание шатунов.
Д
В
Dд
Ш
А
О
Аксиально-поршневые гидромашины делят на:
-гидромашины с наклонным диском; -гидромашины с наклонным блоком.
Расчетная схема гидромашины с наклонным блоком на Рис.30
Объемные соотношения
При повороте вала на 2 поршень из крайне выдвинутого
положения переместится в цилиндре в крайне вдвинутое и
обратно. Максимальный ход поршня в цилиндре можно
определить из треугольника АОС h max D д Sin
При этом он вытеснит объем жидкости:
1
2
2
П БЦ Р
Q
dп
Dб
dп
dп
V п S п h max 4 h max 4 D д Sin
При вращении вала со скоростью n об поршень будет
с
перекачивать в единицу времени объем, равный его
теоретическому расходу (подаче)
Q т S п h max n
С
z
h max
Q т S п h max zn
Условные обозначения:
В – вал гидромашины;
Д – диск (шайба);
Ш – шатун;
П – поршень;
БЦ – блок цилиндров;
Р – распределитель;
D д - диаметр делительной окружности диска;
D б - диаметр делительной окружности блока цилиндров;
d п - диаметр поршня.
4
d 2п
h max n 4 n D д Sin
Тогда
поршней гидромашины будут давать
теоретический расход (геометрическую подачу):
Q2
Рис.30
d 2п
d 2п
4
d 2п
h max zn 4 zn D д Sin
Основные параметры
Q т d 2п
q
z D д Sin - рабочий объем машины
n
4
Q т q d 2п
w
D д z Sin - характерный размер
2
8
2
d
Для регулируемых машин
w п z D д Sin max
8
Q т wU ;
U
Sin
Sin max
- параметр регулирования U [ 1 , 1 ]
47.
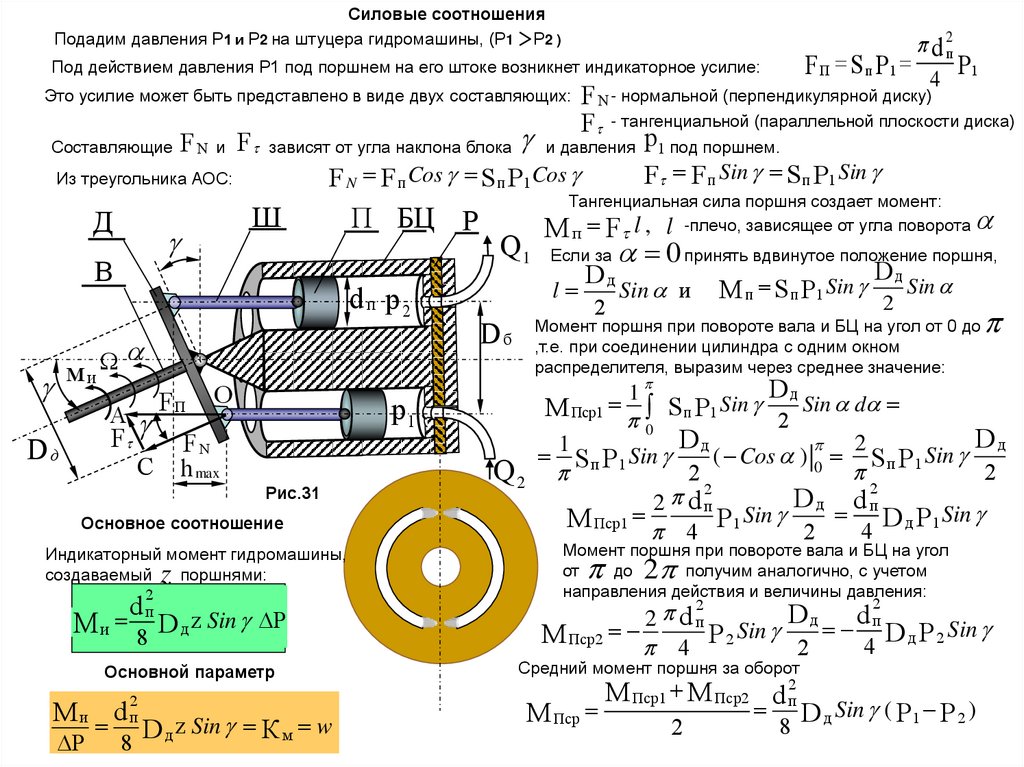
Силовые соотношенияПодадим давления Р1 и Р2 на штуцера гидромашины, (Р1 Р2 )
d 2п
F П S п Р1 4 Р1
Под действием давления Р1 под поршнем на его штоке возникнет индикаторное усилие:
Это усилие может быть представлено в виде двух составляющих: F - нормальной (перпендикулярной диску)
F - тангенциальной (параллельной плоскости диска)
Составляющие F и F зависят от угла наклона блока
В
и
А
F
Dд
FП
О
р1
F
h max
С
Рис.31
Основное соотношение
Индикаторный момент гидромашины,
создаваемый
поршнями:
2
Mи
d
п
8
z
D д z Sin Р
Основной параметр
Ми d
Р
П БЦ Р
dп р2
м
Ш
2
п
8
F F п Sin S п Р1 Sin
F N F п Cos S п Р1Cos
Из треугольника АОС:
Д
и давления р1 под поршнем.
D д z Sin К м w
Тангенциальная сила поршня создает момент:
п l , l -плечо, зависящее от угла поворота
М
F
Q 1 Если за 0 принять вдвинутое положение поршня,
l
Dб
Dд
2
Dд
М п S п Р1 Sin 2 Sin
Sin и
Момент поршня при повороте вала и БЦ на угол от 0 до
,т.е. при соединении цилиндра с одним окном
распределителя, выразим через среднее значение:
1
Dд
Sin d
0
2
Dд
Dд
2
1
S п Р1 Sin
( Cos ) |0 S п Р1 Sin
2
2
Q2
2
2
Dд dп
2 dп
M Пср1 4 Р1 Sin 2 4 D д Р1 Sin
М Пср1
S п Р1 Sin
Момент поршня при повороте вала и БЦ на угол
от
до
получим аналогично, с учетом
направления действия и величины давления:
2
2
Dд dп
2 dп
M Пср2 4 Р 2 Sin 2 4 D д Р 2 Sin
2
Средний момент поршня за оборот
M Пср
М Пср1 М Пср2 d 2п
2
8
D д Sin ( Р1 Р 2 )
48.
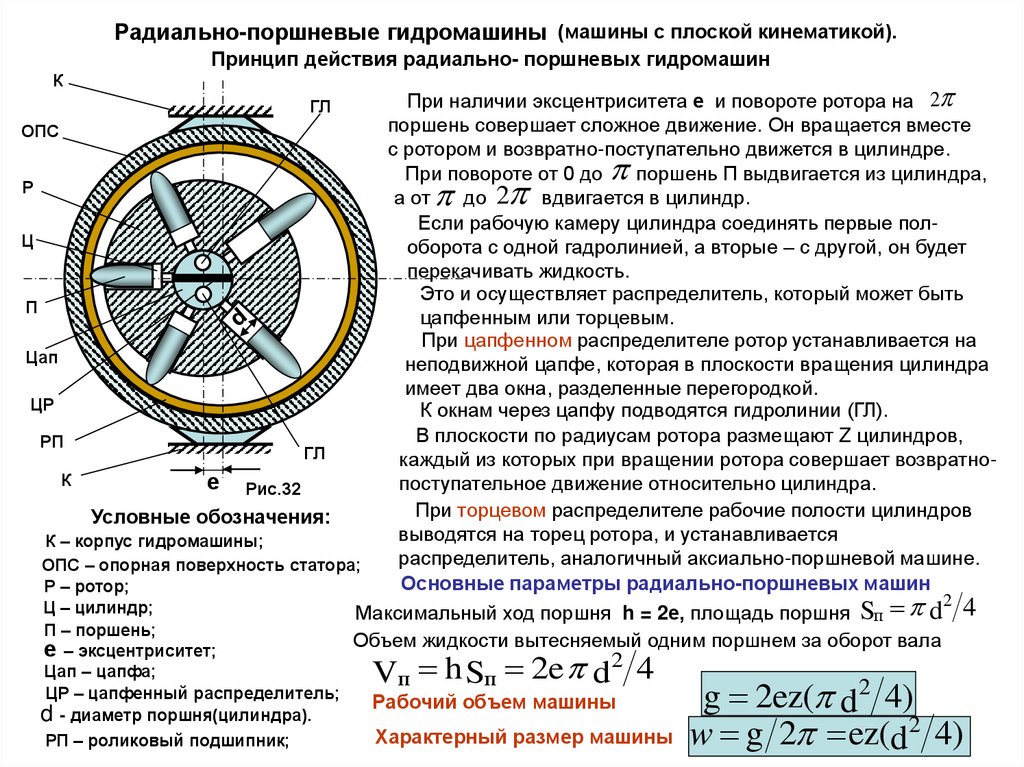
Радиально-поршневые гидромашины (машины с плоской кинематикой).Принцип действия радиально- поршневых гидромашин
К
При наличии эксцентриситета е и повороте ротора на 2
поршень совершает сложное движение. Он вращается вместе
ОПС
с ротором и возвратно-поступательно движется в цилиндре.
При повороте от 0 до
поршень П выдвигается из цилиндра,
Р
а от
до 2
вдвигается в цилиндр.
Если рабочую камеру цилиндра соединять первые полЦ
оборота с одной гадролинией, а вторые – с другой, он будет
перекачивать жидкость.
Это и осуществляет распределитель, который может быть
П
цапфенным или торцевым.
При цапфенном распределителе ротор устанавливается на
Цап
неподвижной цапфе, которая в плоскости вращения цилиндра
имеет два окна, разделенные перегородкой.
ЦР
К окнам через цапфу подводятся гидролинии (ГЛ).
В плоскости по радиусам ротора размещают Z цилиндров,
РП
ГЛ
каждый из которых при вращении ротора совершает возвратноК
е Рис.32
поступательное движение относительно цилиндра.
При торцевом распределителе рабочие полости цилиндров
Условные обозначения:
выводятся на торец ротора, и устанавливается
К – корпус гидромашины;
распределитель, аналогичный аксиально-поршневой машине.
ОПС – опорная поверхность статора;
Основные параметры радиально-поршневых машин
Р – ротор;
2
Ц – цилиндр;
Максимальный ход поршня h = 2е, площадь поршня Sп d 4
П – поршень;
Объем жидкости вытесняемый одним поршнем за оборот вала
е – эксцентриситет;
ГЛ
Цап – цапфа;
ЦР – цапфенный распределитель;
d - диаметр поршня(цилиндра).
РП – роликовый подшипник;
Vп h Sп 2e d2 4
g 2ez( d2 4)
2
Характерный размер машины w g 2 ez(d 4)
Рабочий объем машины
49.
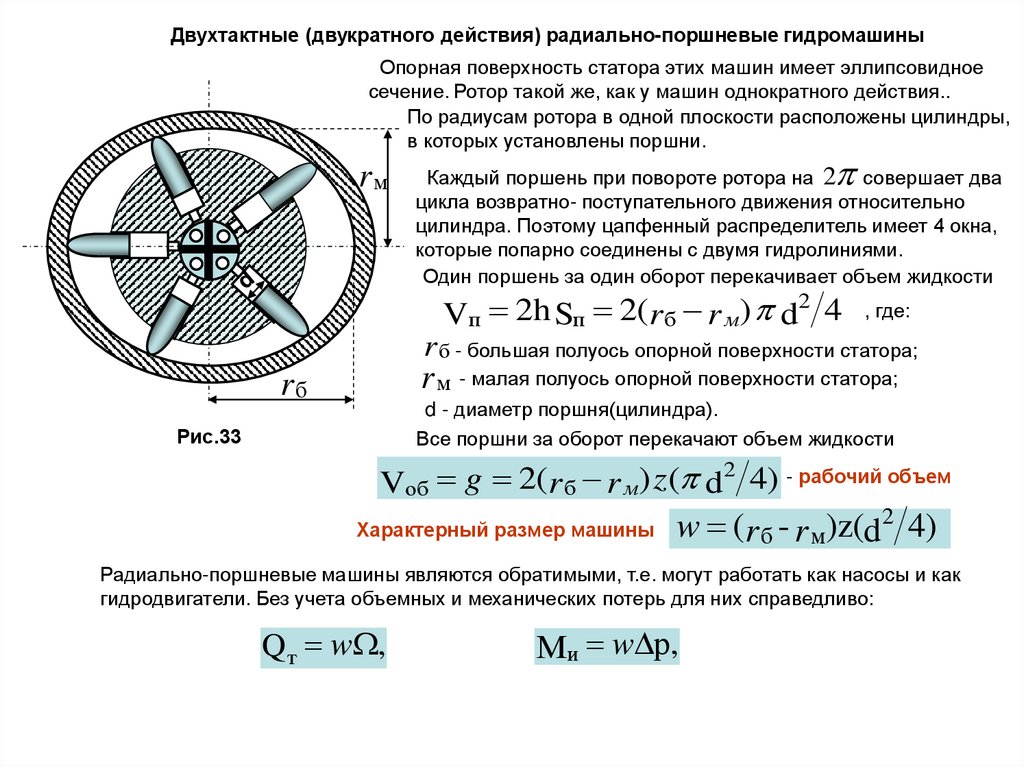
Двухтактные (двукратного действия) радиально-поршневые гидромашиныОпорная поверхность статора этих машин имеет эллипсовидное
сечение. Ротор такой же, как у машин однократного действия..
По радиусам ротора в одной плоскости расположены цилиндры,
в которых установлены поршни.
rм
Каждый поршень при повороте ротора на 2 совершает два
цикла возвратно- поступательного движения относительно
цилиндра. Поэтому цапфенный распределитель имеет 4 окна,
которые попарно соединены с двумя гидролиниями.
Один поршень за один оборот перекачивает объем жидкости
Vп 2h Sп 2(r б r м) d2 4 , где:
r б - большая полуось опорной поверхности статора;
r м - малая полуось опорной поверхности статора;
rб
d - диаметр поршня(цилиндра).
Все поршни за оборот перекачают объем жидкости
Рис.33
Vоб g 2(r б r м) z ( d2 4) - рабочий объем
Характерный размер машины
w (r б - r м)z(d2 4)
Радиально-поршневые машины являются обратимыми, т.е. могут работать как насосы и как
гидродвигатели. Без учета объемных и механических потерь для них справедливо:
Qт w ,
Ми w р,
50.
Многорядные радиально-поршневые гидромашиныРис.34
51.
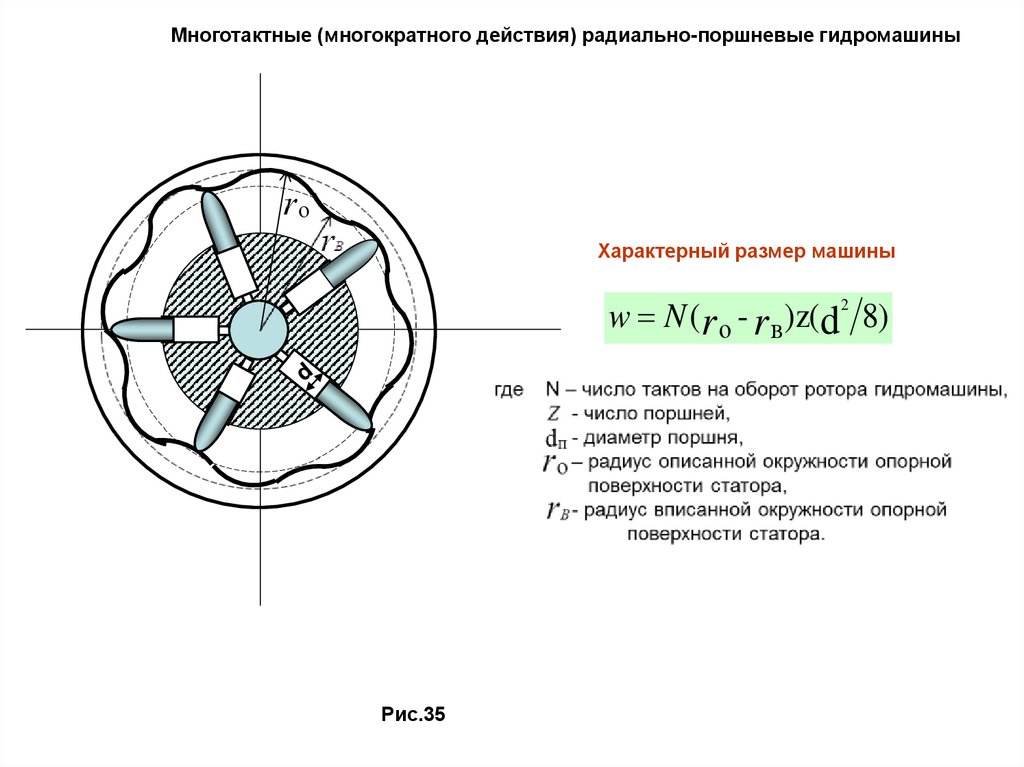
Многотактные (многократного действия) радиально-поршневые гидромашиныХарактерный размер машины
w N (r о - r в)z(d2 8)
Рис.35
52.
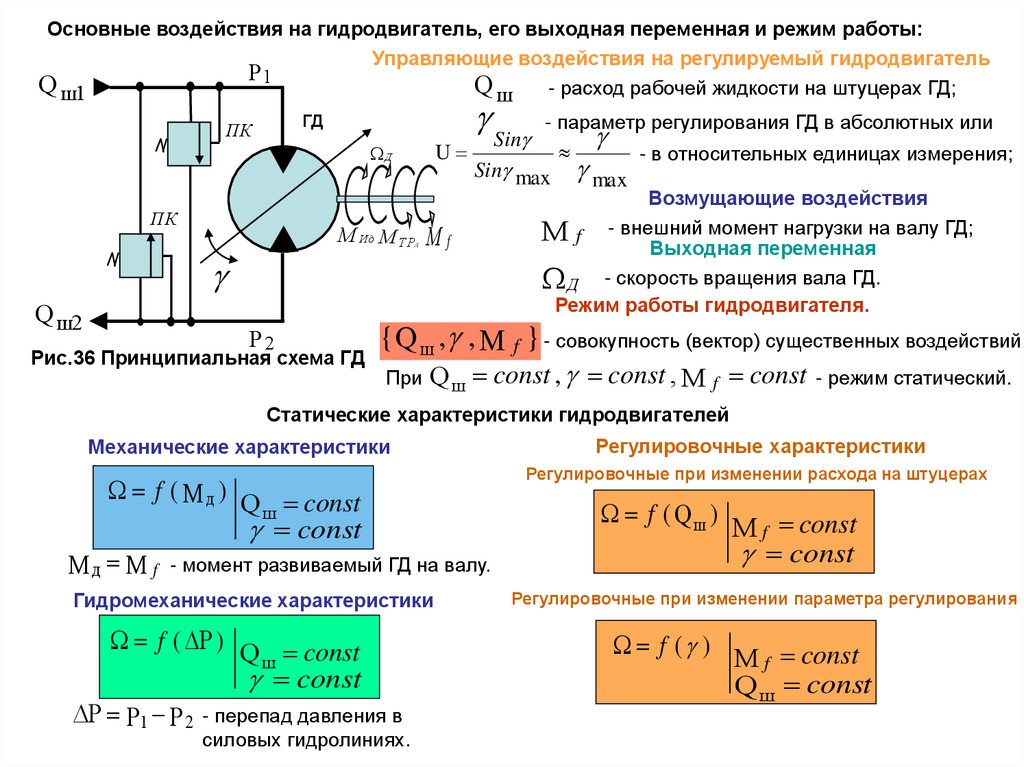
Основные воздействия на гидродвигатель, его выходная переменная и режим работы:Управляющие воздействия на регулируемый гидродвигатель
Р1
Q ш1
Q ш - расход рабочей жидкости на штуцерах ГД;
ГД
ПК
U
Д
ПК
Sin - параметр
регулирования ГД в абсолютных или
Sin max
М Ид М ТР М f
Д
Q ш2
max
- в относительных единицах измерения;
Возмущающие воздействия
М f - внешний момент нагрузки на валу ГД;
Выходная переменная
Д - скорость вращения вала ГД.
Режим работы гидродвигателя.
{ Q ш , , M f } - совокупность (вектор) существенных воздействий:
Рис.36 Принципиальная схема ГД
При Q ш const , const , M f const - режим статический.
Р2
Статические характеристики гидродвигателей
Механические характеристики
f ( M д ) Q const
ш
const
M д М f - момент развиваемый ГД на валу.
Гидромеханические характеристики
f ( Р ) Q const
ш
const
Р Р1 Р 2 - перепад давления в
силовых гидролиниях.
Регулировочные характеристики
Регулировочные при изменении расхода на штуцерах
f ( Qш )
M f const
const
Регулировочные при изменении параметра регулирования
f ( ) M const
f
Q ш const
53.
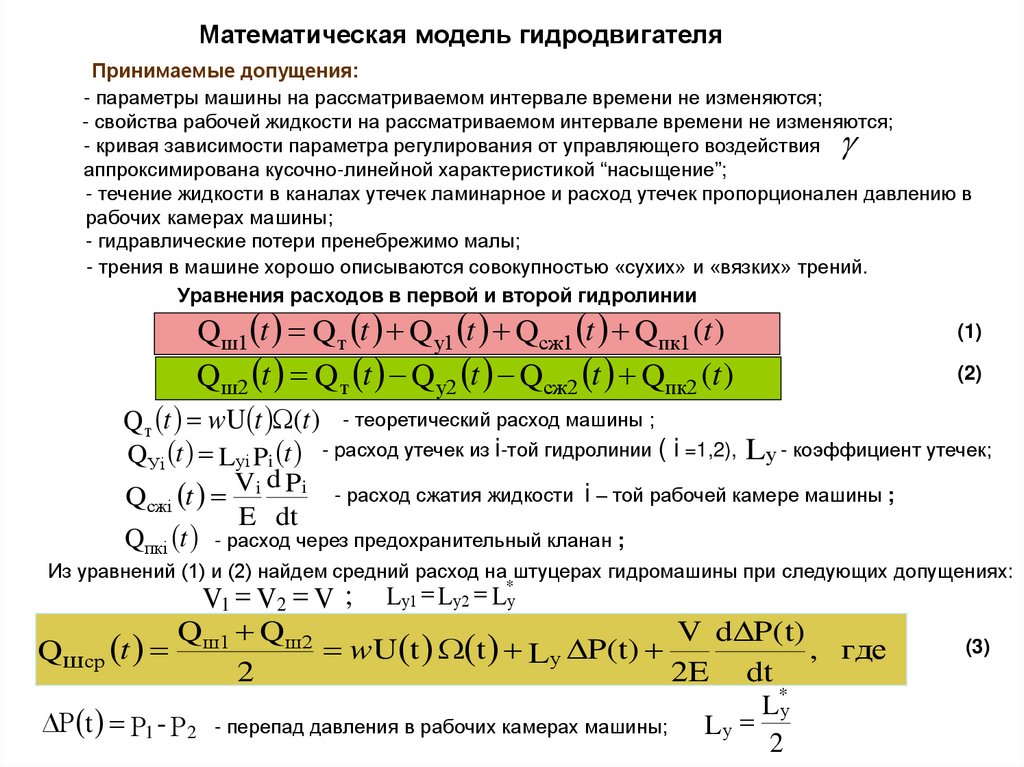
Математическая модель гидродвигателяПринимаемые допущения:
- параметры машины на рассматриваемом интервале времени не изменяются;
- свойства рабочей жидкости на рассматриваемом интервале времени не изменяются;
- кривая зависимости параметра регулирования от управляющего воздействия
аппроксимирована кусочно-линейной характеристикой “насыщение”;
- течение жидкости в каналах утечек ламинарное и расход утечек пропорционален давлению в
рабочих камерах машины;
- гидравлические потери пренебрежимо малы;
- трения в машине хорошо описываются совокупностью «сухих» и «вязких» трений.
Уравнения расходов в первой и второй гидролинии
Qш1 t Qт t Q у1 t Qсж1 t Qпк1 (t )
Qш2 t Qт t Q у2 t Qсж2 t Qпк2 (t )
Qт t wU t (t )
(1)
(2)
- теоретический расход машины ;
- pасход утечек из i-той гидролинии ( i =1,2), L у - коэффициент утечек;
QУi t Lуi Pi t
V dP
Qсжi t i i - расход сжатия жидкости i – той рабочей камере машины ;
E dt
t
- расход через предохранительный кланан ;
Qпкi
Из уравнений (1) и (2) найдем средний расход на штуцерах гидромашины при следующих допущениях:
V1 V2 V ; Lу1 Lу2 Lу
Q Qш2
V d P(t)
wU t t L у P(t)
, где
Qшср t ш1
2
2E dt
*
Р t Р1 - Р2 - перепад давления в рабочих камерах машины;
L*у
Lу
2
(3)
54.
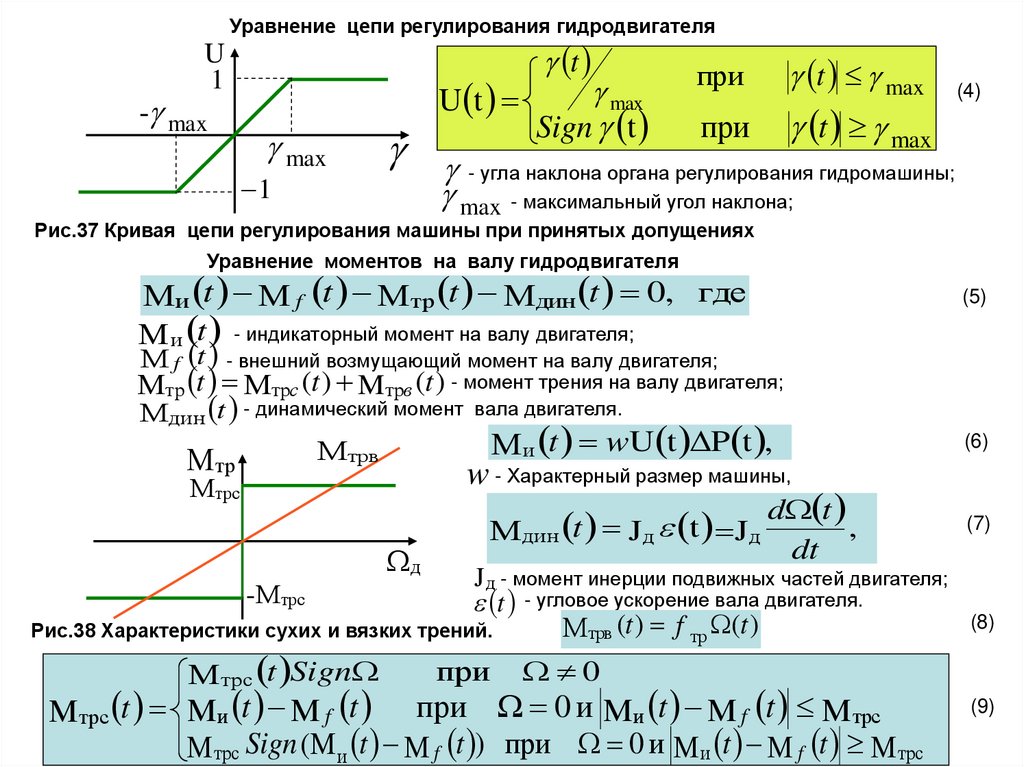
Уравнение цепи регулирования гидродвигателяt
U
1
- max
max
1
при
t max (4)
max
U t
Sign t
при t max
- угла наклона органа регулирования гидромашины;
max - максимальный угол наклона;
Рис.37 Кривая цепи регулирования машины при принятых допущениях
Уравнение моментов на валу гидродвигателя
Ми t М f t Мтр t Мдин t 0, где
М и t - индикаторный момент на валу двигателя;
(5)
М f t - внешний возмущающий момент на валу двигателя;
Мтр t Мтрс (t ) Mтрв (t ) - момент трения на валу двигателя;
Мдин t - динамический момент вала двигателя.
Ми t wU t P t ,
Мтрв
М тр
(6)
w - Характерный размер машины,
Мтрс
д
Мдин t J д t J д
d t
,
dt
J д - момент инерции подвижных частей двигателя;
t - угловое ускорение вала двигателя.
Мтрв (t ) f тр (t )
Рис.38 Характеристики сухих и вязких трений.
(7)
-Мтрс
М трс t Sign
при
(8)
0
Мтрс t Ми t М f t при 0 и Ми t М f t М трс
Мтрс Sign (Ми t М f t ) при 0 и Ми t М f t Мтрс
(9)
55.
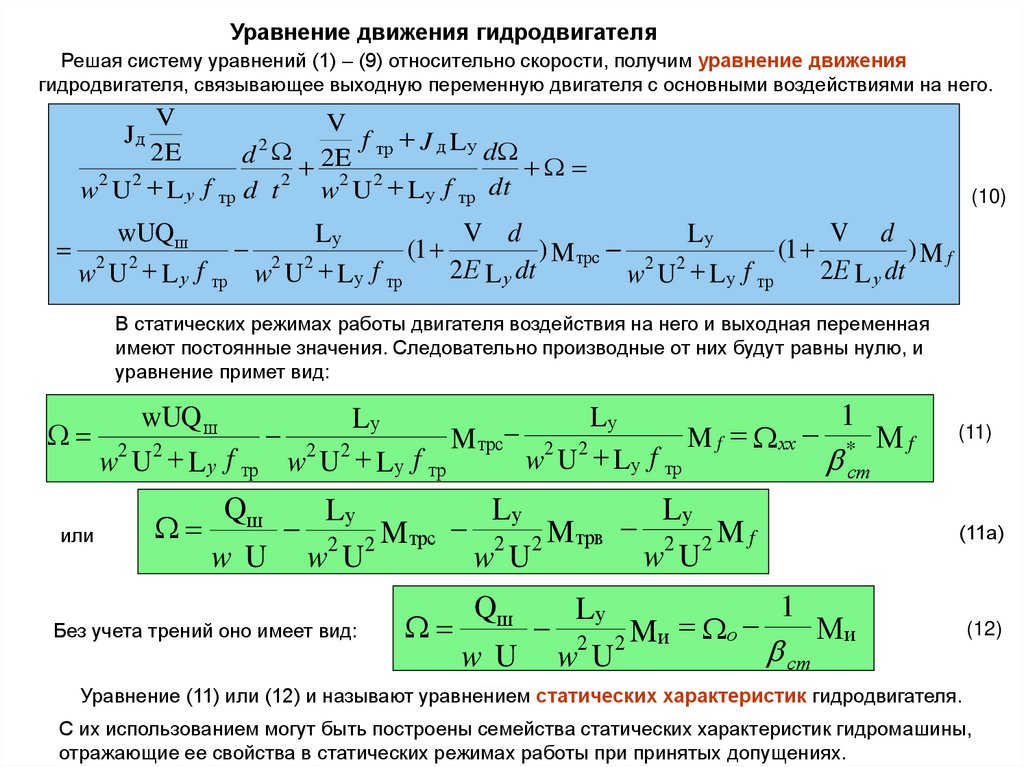
Уравнение движения гидродвигателяРешая систему уравнений (1) – (9) относительно скорости, получим уравнение движения
гидродвигателя, связывающее выходную переменную двигателя с основными воздействиями на него.
V
V
f J д L у d
2
2E
d 2E тр
2 2
2
2 2
dt
f
f
w U L у тр d t
w U L у тр
Jд
(10)
V d
wUQ ш
V d
Lу
Lу
(
1
)
(
1
)M f
M трс
2 2
2 2
2 2
2 Е L у dt
2 Е L у dt
w U L у f тр w U L у f тр
w U L у f тр
В статических режимах работы двигателя воздействия на него и выходная переменная
имеют постоянные значения. Следовательно производные от них будут равны нулю, и
уравнение примет вид:
1
wUQ ш
Lу
Lу
2 2
2 2
M f хх * М f
M трс 2 2
f
w U L у тр
ст
w U L у f тр w U L у f тр
или
Qш
w U
Lу
Lу
Lу
2 2Mf
2 2 M трв
2 2 M трс
w U
w U
w U
Без учета трений оно имеет вид:
Qш
wU
(11)
(11а)
1
Lу
о
Ми
2 2 Mи
ст
w U
(12)
Уравнение (11) или (12) и называют уравнением статических характеристик гидродвигателя.
С их использованием могут быть построены семейства статических характеристик гидромашины,
отражающие ее свойства в статических режимах работы при принятых допущениях.
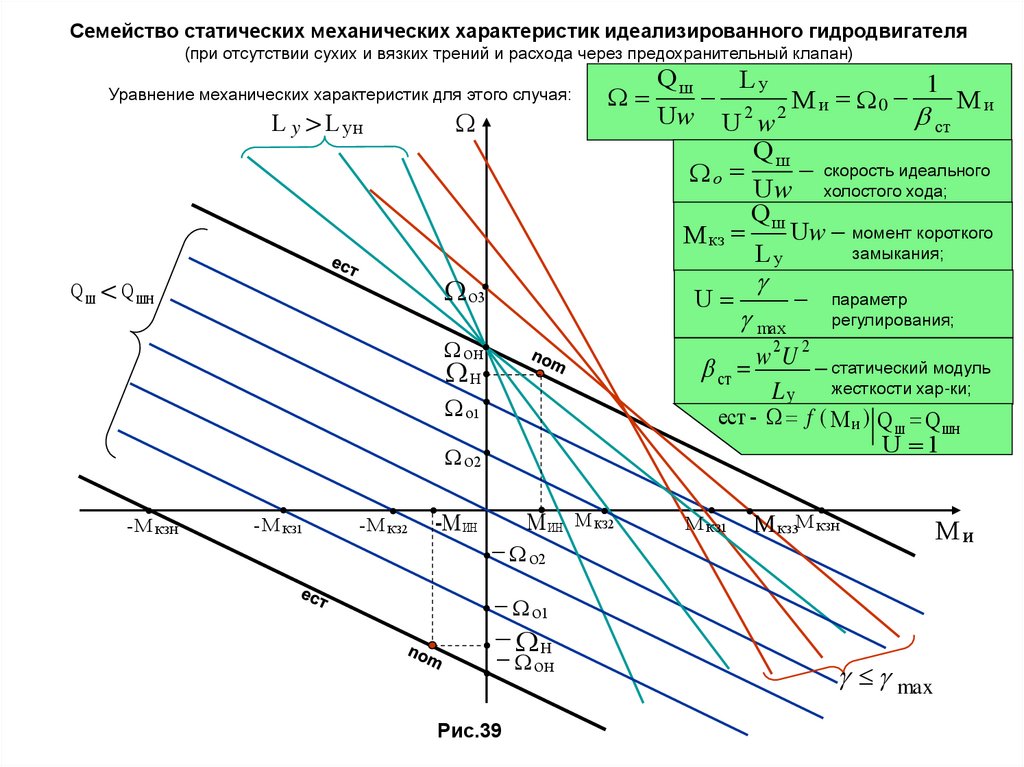
56.
Семейство статических механических характеристик идеализированного гидродвигателя(при отсутствии сухих и вязких трений и расхода через предохранительный клапан)
Уравнение механических характеристик для этого случая:
L y L yн
Qш
о3
Q шн
он
Н
о1
ест - f ( M и ) Q ш Q шн
U 1
о2
- М кзн
- М кз1
- М кз2
Qш
Ly
1
2 2 M и 0
Ми
Uw U w
ст
Qш
скорость идеального
о
Uw холостого хода;
Qш
Uw момент короткого
М кз
замыкания;
Ly
U
параметр
регулирования;
max
2 2
w
ст U статический модуль
L у жесткости хар-ки;
М ИН М кз2
-М ИН
о2
М кз1
М кз3М кзн
о1
Н
он
Рис.39
max
Ми
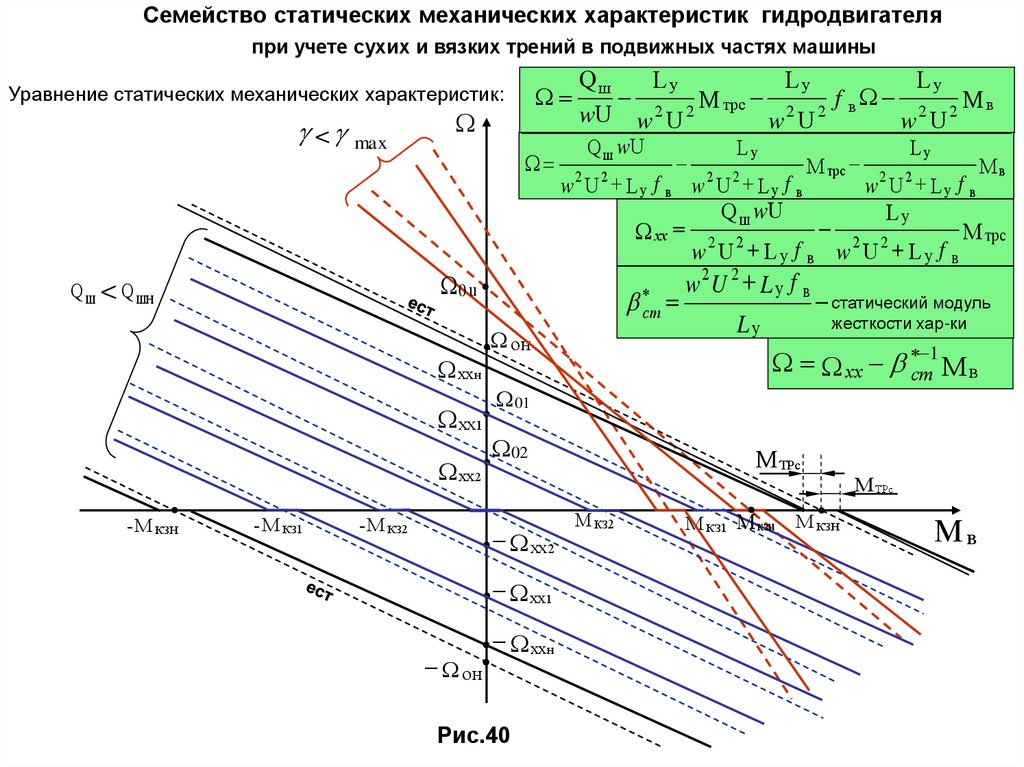
57.
Семейство статических механических характеристик гидродвигателяпри учете сухих и вязких трений в подвижных частях машины
Уравнение статических механических характеристик:
max
Qш
Q ш wU
ххн
хх1
хх2
- М кз1
- М кз2
2
02
он
ххн
Рис.40
M трс
Lу
1
хх ст
Мв
01
хх1
Ly
w 2U 2 L у f в
статический модуль
ст
жесткости хар-ки
Lу
он
хх2
Mв
2 2
2 2
f
f
f
w U Lу в w U Lу в
w U Lу в
Q ш wU
Ly
хх
M трс
w2 U 2 L у f в w2 U 2 L у f в
2
0 u
Q шн
- М кзн
Qш
Ly
Lу
Lу
2 2 M трс 2 2 f в 2 2 M в
wU w U
w U
w U
М ТРс
М кз2
М кз1 М кзu
М кзн
М ТРс
Мв
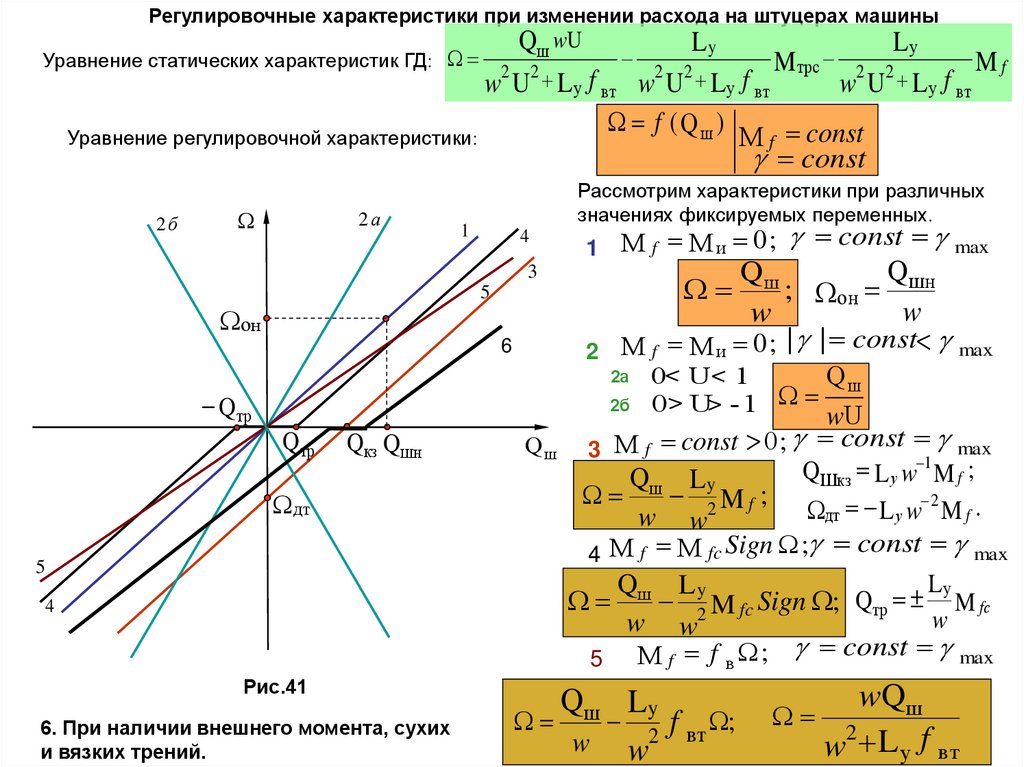
58.
Регулировочные характеристики при изменении расхода на штуцерах машиныQш wU
Ly
Lу
M
Mf
трс
2 2
2 2
2 2
f
f
f
w U Lу вт w U Lу вт
w U Lу вт
f ( Qш )
Уравнение регулировочной характеристики:
M f const
const
Уравнение статических характеристик ГД:
2б
2а
Рассмотрим характеристики при различных
значениях фиксируемых переменных.
1
4
3
5
он
1 M f М и 0 ; const max
Q
Q
ш ; он шн
6
2 M f М и 0 ; | | const
2а
Qтр
2б
Qтр
Qкз Qшн
дт
5
4
Рис.41
6. При наличии внешнего момента, сухих
и вязких трений.
w
w
max
0 U 1
Qш
0 U -1
wU
Q ш 3 M f const 0 ; const max
Qшкз L у w 1 M f ;
Qш L y
2Mf ;
2
w
L
Mf .
дт
у
w w
4 M f M fc Sign ; const max
Lу
Q Ly
ш 2 M fc Sign ; Qтр M fс
w
w w
M f f в ; const max
5
Qш L y
f ;
w w2 вт
wQ ш
w2 L у f вт
59.
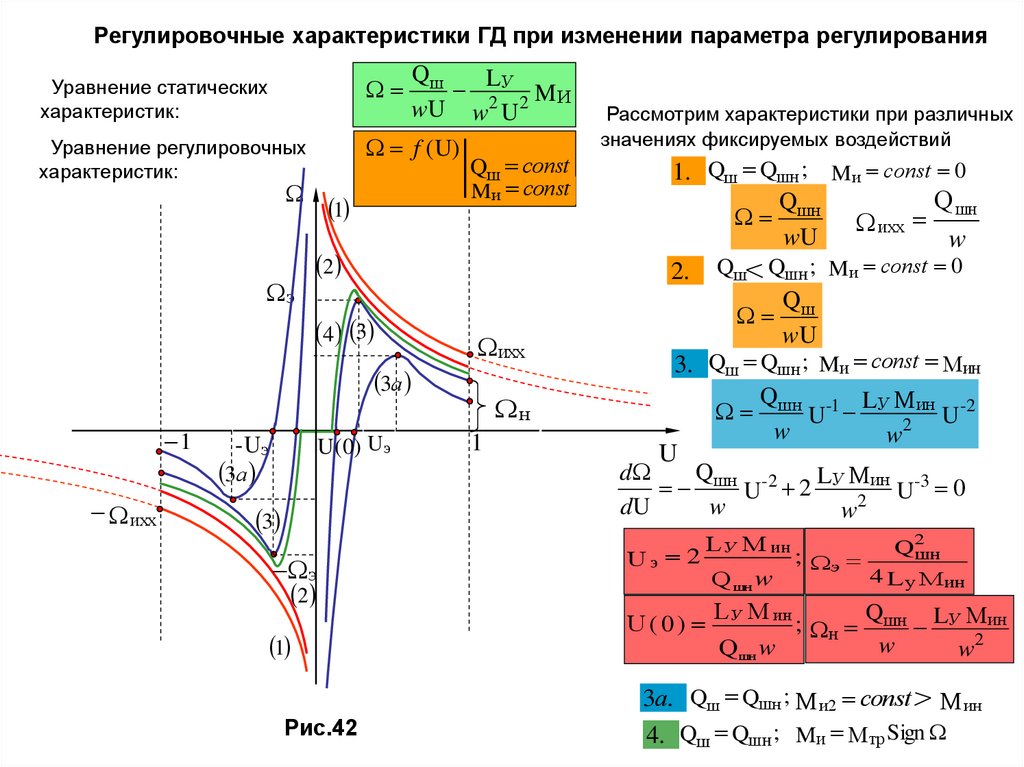
Регулировочные характеристики ГД при изменении параметра регулированияQш
У
L
MИ
wU w2 U 2
Уравнение статических
характеристик:
Уравнение регулировочных
характеристик:
f ( U)
1
2
э
4 3
3а
1
ихх
Qш соnst
Mи соnst
U ( 0) U э
- Uэ
3а
3
э
2
1
Рис.42
ихх
н
1
Рассмотрим характеристики при различных
значениях фиксируемых воздействий
1. Qш QШн ; Mи соnst 0
Q
Q
шн ихх шн
wU
w
2. Qш QШн ; Mи соnst 0
Q
ш
wU
3. Qш QШн ; Mи соnst Мин
Q
ин -2
шн U-1 LУ М
U
2
w
w
U
Q
d
ин -3
шн U-2 2 LУ М
U 0
2
dU
w
w
Uэ 2
L У М ин
U(0)
Q шн w
L У М ин
Q шн w
; э
; н
2
Qшн
4 L у М ин
Qшн LУ М ин
w
w2
3а. Qш QШн ; M и2 соnst М ин
4. Qш QШн ; Mи Мтр Sign
60.
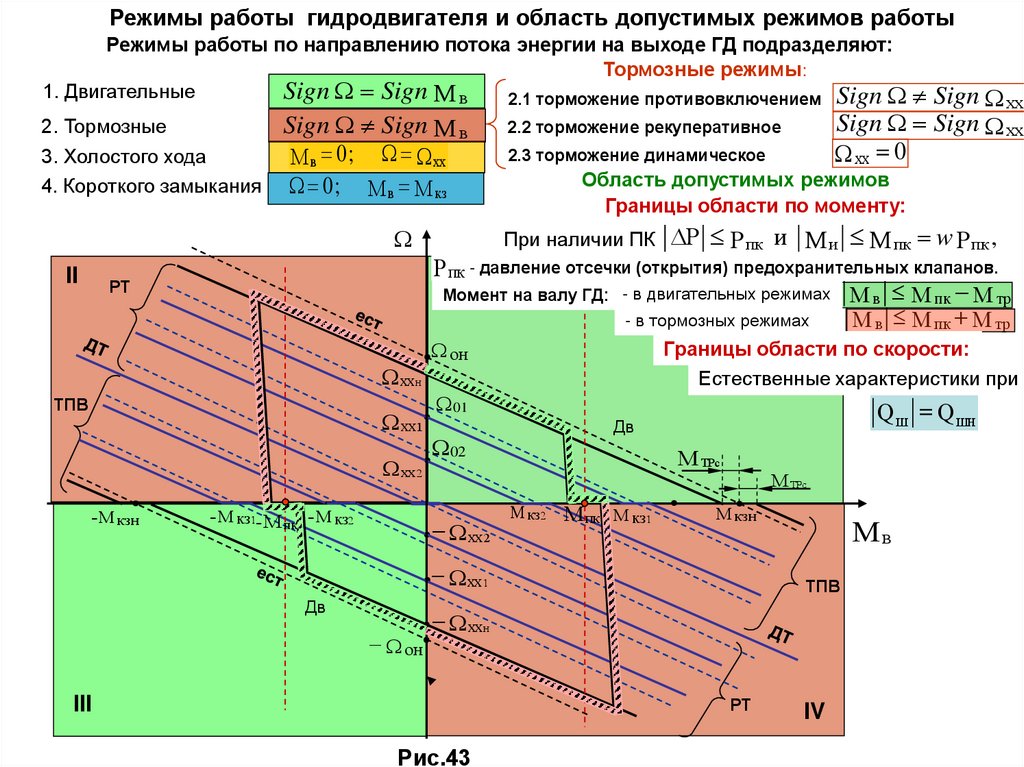
Режимы работы гидродвигателя и область допустимых режимов работыРежимы работы по направлению потока энергии на выходе ГД подразделяют:
Тормозные режимы:
1. Двигательные
Sign Sign M в
2.1 торможение противовключением Sign Sign
Sign Sign M в
3. Холостого хода
M в 0 ; хх
4. Короткого замыкания 0 ; М в М кз
2. Тормозные
II
Sign Sign хх
хх 0
2.2 торможение рекуперативное
2.3 торможение динамическое
Область допустимых режимов
Границы области по моменту:
При наличии ПК
Р Р пк и М и М пк w P пк ,
клапанов.
Р пк - давление отсечки (открытия) предохранительных
I
РТ
Момент на валу ГД: - в двигательных режимах
- в тормозных режимах
ххн
ТПВ
хх1
хх2
- М кзн
хх
- М кз1-М пк - М кз2
он
Границы области по скорости:
Естественные характеристики при
01
Q ш Q шн
Дв
02
хх2
М ТРс
М кз2
М пк М кз1
М ТРс
М кзн
хх1
Дв
он
Мв
ТПВ
ххн
РТ
III
Рис.43
М в М пк М тр
М в М пк М тр
IV
61.
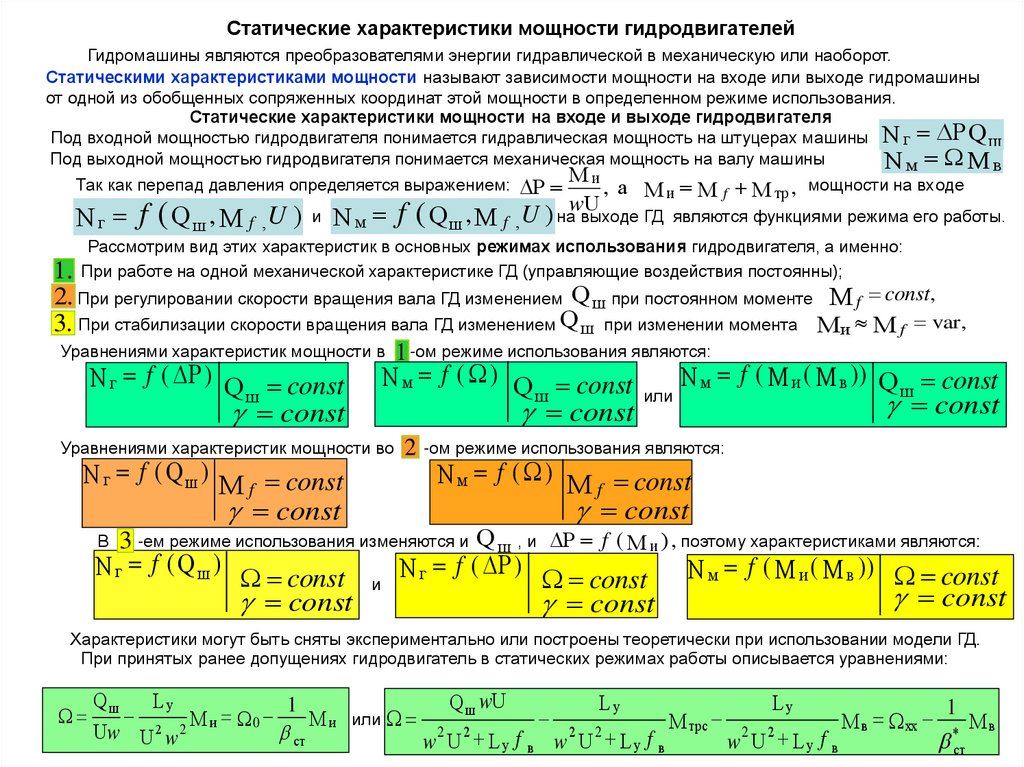
Статические характеристики мощности гидродвигателейГидромашины являются преобразователями энергии гидравлической в механическую или наоборот.
Статическими характеристиками мощности называют зависимости мощности на входе или выходе гидромашины
от одной из обобщенных сопряженных координат этой мощности в определенном режиме использования.
Статические характеристики мощности на входе и выходе гидродвигателя
Под входной мощностью гидродвигателя понимается гидравлическая мощность на штуцерах машины N г Р Q ш
Под выходной мощностью гидродвигателя понимается механическая мощность на валу машины
Nм Мв
М
и
Так как перепад давления определяется выражением: Р
, а М и М f М тр , мощности на входе
wU
N г f ( Q ш , М f ,U ) и N м f ( Q ш , М f ,U ) на выходе ГД являются функциями режима его работы.
Рассмотрим вид этих характеристик в основных режимах использования гидродвигателя, а именно:
1. При работе на одной механической характеристике ГД (управляющие воздействия постоянны);
2. При регулировании скорости вращения вала ГД изменением Q ш при постоянном моменте М f const,
3. При стабилизации скорости вращения вала ГД изменением Q ш при изменении момента Ми М f var,
Уравнениями характеристик мощности в 1 -ом режиме использования являются:
N г f ( Р ) Q const
ш
const
N м f ( ) Q const
N м f ( М и ( М в )) Q ш const
ш
или
const
const
Уравнениями характеристик мощности во 2 -ом режиме использования являются:
N г f ( Q ш ) M f const
const
N м f ( ) М f const
const
В 3 -ем режиме использования изменяются и Q ш , и
Р f ( М и ) , поэтому характеристиками являются:
N г f ( Q ш ) const
N г f ( Р ) const
и
const
const
N м f ( М и ( М в )) const
const
Характеристики могут быть сняты экспериментально или построены теоретически при использовании модели ГД.
При принятых ранее допущениях гидродвигатель в статических режимах работы описывается уравнениями:
Qш
Ly
1
2 2 M и 0
Ми
Uw U w
ст
или
Q ш wU
Ly
w U L у f в w2 U 2 L у f в
2
2
M трс
Lу
w U Lу f в
2
2
M в хх
1
ст
Мв
62.
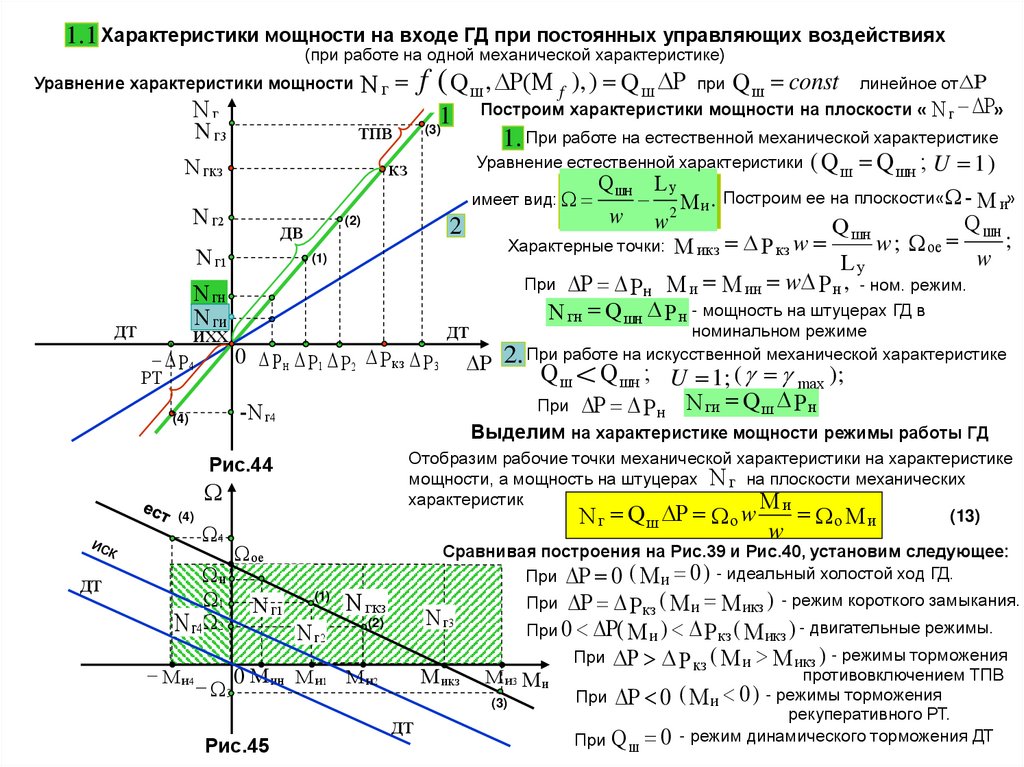
1.1 Характеристики мощности на входе ГД при постоянных управляющих воздействиях(при работе на одной механической характеристике)
f ( Q ш , Р(М f ), ) Q ш Р при Q ш const линейное от Р
Уравнение характеристики мощности N г
Nг
N г3
тпв
N гкз
кз
Р4
РТ
(2)
дв
N г1
дт
(1)
0 Р н Р1 Р 2 Р кз Р3
дт
н
1
N г4 2
М и4
дт
Р
Q шн ; U 1; ( max );
N ги Q ш Р н
Отобразим рабочие точки механической характеристики на характеристике
мощности, а мощность на штуцерах N г на плоскости механических
характеристик
Ми
о М и
(13)
N г Q ш Р о w
w
Сравнивая построения на Рис.39 и Рис.40, установим следующее:
При Р 0 ( М и 0 ) - идеальный холостой ход ГД.
При Р Р ( М и М икз ) - режим короткого замыкания.
(1)
N гкз
N г2
(2)
N г3
3 0 М ин М и1 М и2
М икз
Рис.45
Qш
Выделим на характеристике мощности режимы работы ГД
ое
N г1
номинальном режиме
2. При работе на искусственной механической характеристике
При Р Р н
4
М и М ин w Р н , - ном. режим.
N гн Q шн Р н - мощность на штуцерах ГД в
При Р Р н
Рис.44
(4)
Q шн L y
M и . Построим ее на плоскости« - М и»
w w2
Q шн
Q шн
;
w ; ое
Характерные точки: М икз Р кз w
w
Lу
2
- N г4
(4)
1. При работе на естественной механической характеристике
Уравнение естественной характеристики ( Q Q
ш
шн ; U 1 )
имеет вид:
N г2
N гн
N ги
ихх
Построим характеристики мощности на плоскости « N г Р»
1
(3)
дт
кз
При 0 Р( М и ) Р кз ( М икз ) - двигательные режимы.
При Р Р кз ( М и М икз ) - режимы торможения
противовключением ТПВ
М и3 М и
режимы
торможения
При Р 0 ( М и 0 )
(3)
рекуперативного РТ.
При Q 0 - режим динамического торможения ДТ
ш
63.
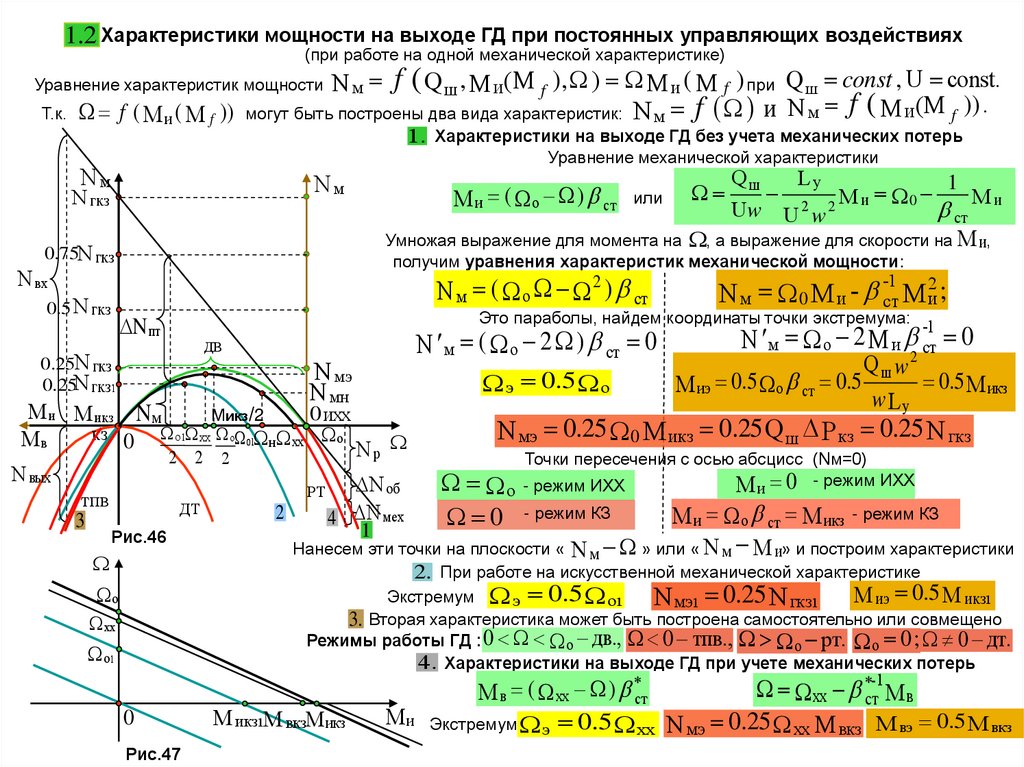
1.2 Характеристики мощности на выходе ГД при постоянных управляющих воздействиях(при работе на одной механической характеристике)
f ( Q ш , М И (М f ), ) М и ( М f ) при Q ш const , U const.
Т.к. f ( M и ( М f )) могут быть построены два вида характеристик: N м f и N м f ( М И (М f )) .
Уравнение характеристик мощности N м
1. Характеристики на выходе ГД без учета механических потерь
Уравнение механической характеристики
Nм
Nм
N гкз
М и ( о ) ст
N вх
0.5 N гкз
Qш
Ly
1
2 2 M и 0
Ми
Uw U w
ст
Умножая выражение для момента на , а выражение для скорости на М и,
получим уравнения характеристик механической мощности:
-1
N м ( о 2 ) ст
N м 0 М и - ст М 2и ;
Это параболы, найдем координаты точки экстремума:
0.75N гкз
Nпт
N м ( о 2 ) ст 0
дв
0.25N гкз
0.25N гкз1
N мэ
N мн
э 0.5 о
М и М икз N м
0 ихх
Микз/2
кз 0 о1 хх о о1 н хх о
Мв
Nр
2 2 2
N вых
N
тпв
3
или
ДТ
Рис.46
РТ
2
об
-1
N м о 2 М и ст 0
Qш w2
0.5 М икз
М иэ 0.5 о ст 0.5
wLу
N мэ 0.25 0 М икз 0.25 Q ш Р кз 0.25 N гкз
Точки пересечения с осью абсцисс (Nм=0)
- режим ИХХ
М и 0 - режим ИХХ
о
0 - режим КЗ
М и о ст М икз - режим КЗ
Нанесем эти точки на плоскости « N м » или « N м М и» и построим характеристики
4 N мех
1
2. При работе на искусственной механической характеристике
Экстремум э 0.5 о1
N мэ1 0.25 N гкз1 М иэ 0.5 М икз1
3. Вторая характеристика может быть построена самостоятельно или совмещено
Режимы работы ГД : 0 о дв., 0 тпв., о рт. о 0 ; 0 дт.
4. Характеристики на выходе ГД при учете механических потерь
хх ст-1 М в
М в ( хх ) ст
о
хх
о1
0
Рис.47
М икз1М вкзМ икз
М и Экстремум э 0.5 хх N мэ 0.25 хх М вкз М вэ 0.5 М вкз
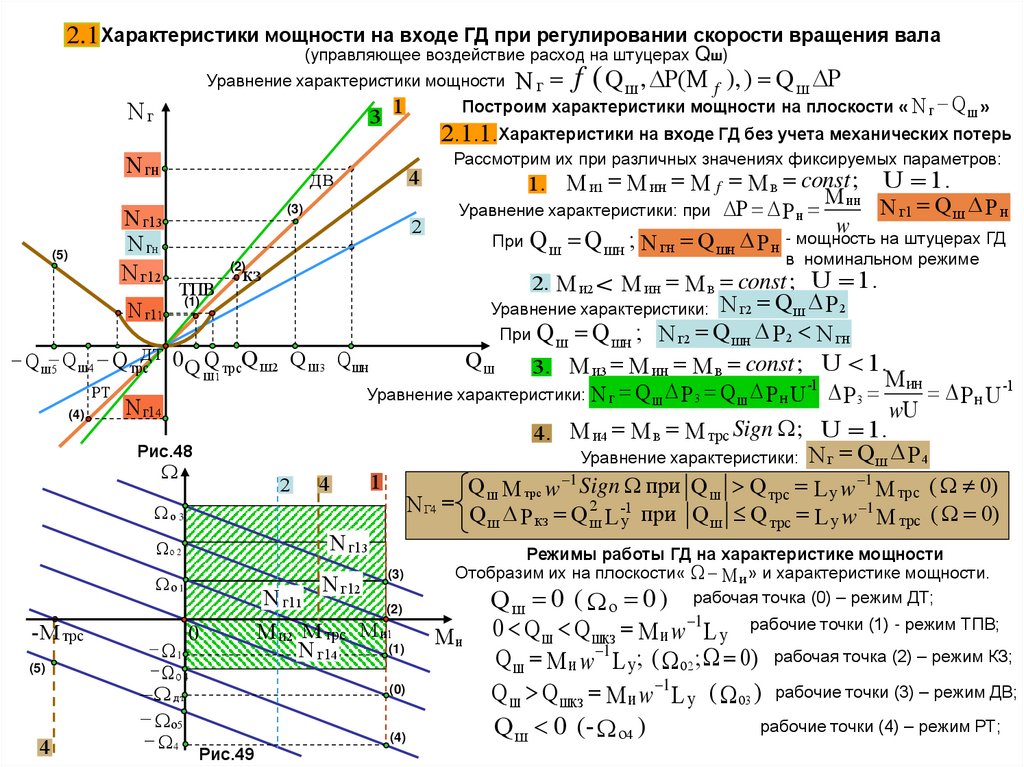
64.
2.1 Характеристики мощности на входе ГД при регулировании скорости вращения вала(управляющее воздействие расход на штуцерах Qш)
Уравнение характеристики мощности N г
Q ш , Р(М f ), ) Q ш Р
f(
Nг
3
N гн
(5)
N г13
N гн
N г12
Построим характеристики мощности на плоскости « N г Q ш »
1
2.1.1.Характеристики на входе ГД без учета механических потерь
4
ДВ
(3)
2
Рассмотрим их при различных значениях фиксируемых параметров:
1. М и1 М ин М f М в const ;
U 1.
М ин
N г1 Q ш Р н
Уравнение характеристики: при Р Р н
w
При Q ш Q шн ; N гн Q шн Р н - мощность на штуцерах ГД
в номинальном режиме
(2)
кз
М ин М в const ; U 1.
Уравнение характеристики: N г2 Q ш Р 2
N г11
При Q ш Q шн ; N г2 Q шн Р 2 N гн
Q ш 5 Q ш4 Q трсДТ 0 Q Q трсQ ш2 Q ш3 Q шн
Qш
3. М и3 М ин М в const ; U 1.
ш1
М ин
-1
РТ
Р н U -1
Уравнение характеристики: N г Q ш Р 3 Q ш Р н U Р 3
N г14
wU
(4)
Sign
;
U
1.
4. М и4 М в М трс
Рис.48
Уравнение характеристики: N г Q ш Р 4
1
2 4
Q ш М трс w 1 Sign при Q ш Q трс L у w 1 М трс ( 0)
2 -1
N Г4 Q
1
о 3
ш Р кз Q ш L у при Q ш Q трс L у w М трс ( 0)
N г13
о 2
Режимы работы ГД на характеристике мощности
тпв
(1)
о 1
-М трс
(5)
4
1
о 4
дт
о5
4
2. М и2
N г12
0
(3)
N г11
(2)
М и2 М трс М и1
(1)
N г14
(0)
(4)
Рис.49
Отобразим их на плоскости« М и » и характеристике мощности.
Q ш 0 ( о 0 ) рабочая точка (0) – режим ДТ;
1
рабочие точки (1) - режим ТПВ;
М и 0 Q ш Q шкз М и w L у
Q ш М и w 1 L у ; ( о2 ; 0) рабочая точка (2) – режим КЗ;
Q ш Q шкз М и w 1 L у ( о3 ) рабочие точки (3) – режим ДВ;
рабочие точки (4) – режим РТ;
Q ш 0 (- о4 )
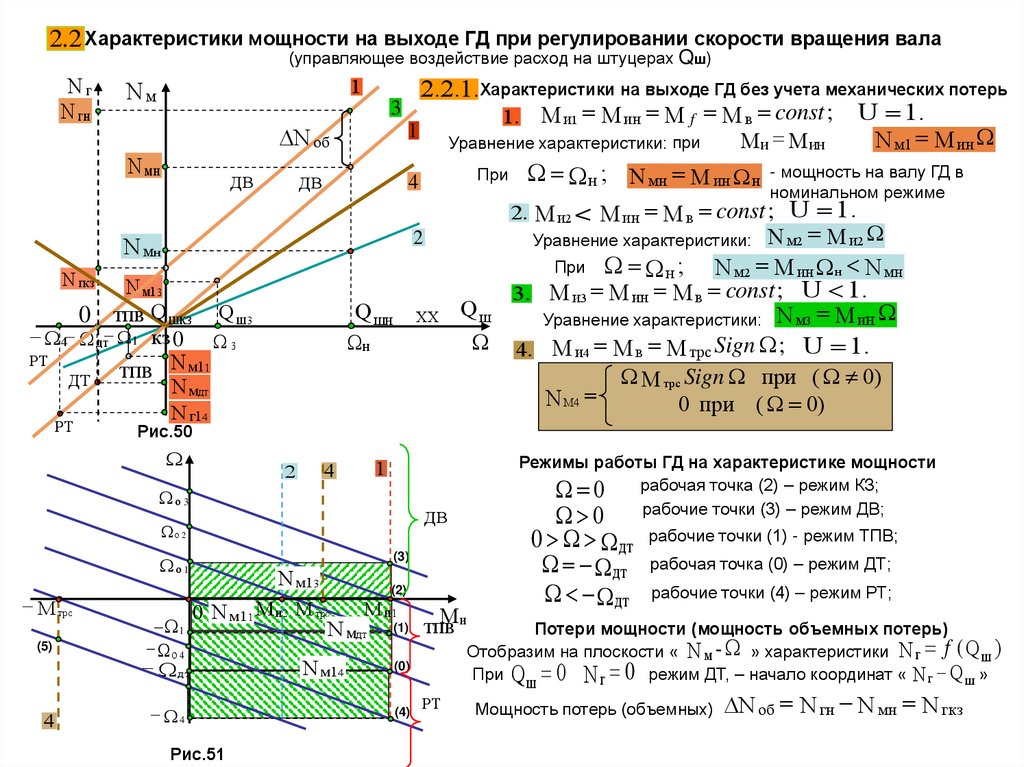
65.
2.2 Характеристики мощности на выходе ГД при регулировании скорости вращения вала(управляющее воздействие расход на штуцерах Qш)
Nг
N гн
1
Nм
3
N об
N мн
ДВ
ДВ
2.2.1.Характеристики на выходе ГД без учета механических потерь
1. М и1 М ин М f М в const ; U 1.
1
N м1 М ин
М и М ин
Уравнение характеристики: при
При н ; N мн М ин н - мощность на валу ГД в
4
М ин М в const ; U 1.
Уравнение характеристики: N м2 М и2
При н ;
N м2 М ин н N мн
3. М и3 М ин М в const ; U 1.
Уравнение характеристики: N м3 М иН
4. М и4 М в М трс Sign ; U 1.
М трс Sign при ( 0)
N М4
0 при ( 0)
2. М и2
2
N мн
N гкз
N м13
0 тпв Q шкз
4 дт 1 кз 0
РТ
ДТ
РТ
тпв N м11
Q шн
н
Q ш3
3
ХХ
Qш
N мдт
N г14
Рис.50
4
2
Режимы работы ГД на характеристике мощности
0 рабочая точка (2) – режим КЗ;
рабочие точки (3) – режим ДВ;
1
о 3
ДВ
о 2
(3)
о 1
М трс
(5)
4
номинальном режиме
1
о 4
дт
N м13
(2)
М и1
0 N м11 М и2 М трс
Ми
N мдт (1) тпв
4
Рис.51
N м14
Потери мощности (мощность объемных потерь)
Отобразим на плоскости « N м - » характеристики N г f ( Q ш )
При Q ш 0 N г 0 режим ДТ, – начало координат « N г Q ш »
(0)
(4)
0
0 дт рабочие точки (1) - режим ТПВ;
дт рабочая точка (0) – режим ДТ;
дт рабочие точки (4) – режим РТ;
РТ
Мощность потерь (объемных) N об N гн N мн N гкз
66.
3.1 Характеристики мощности на входе ГД при стабилизации скорости вращения вала(управляющее воздействие расход Qш на штуцерах ГД)
Q ш ) или N г f ( Р);
Уравнения характеристик мощности N г
f(
Nг
( const)
3.1.1.Характеристики на входе ГД без учета механических потерь
Уравнение гидромеханической характеристики ГД
Р ( Q ш Q т ) L -у1 или Q ш Q т Q у wU L У Р
1 Умножая выражение для Р на Q ш , а выражение для расхода на Р,
N г4
получим уравнения характеристик гидравлической мощности:
2
N г1
N г Q т Р Р 2 L у
N г ( Q ш Q т Q ш ) L -у1
тпв
Определим характерные точки этих кривых (парабол)
2
3
N г Q т 2 Р L у 0
( 2 Q ш Q т ) L -у1 0
N
г
ДВ
Точки экстремума:
Q шэ 0.5 Q т 0.5 wU Р э 0.5 Q т L -у1 0.5 wU L -у1
0.5 Q т2 Q т2 ИХХ (0)
(3)
Q ш4 0 ДТ
2
2
Q ш2 0.5Q т1 Q т1 w 1 Q ш1 Q ш
N гэ 0 , 25 Q т L -у1 0.25 wU L -у1
N гэ2
Точки пересечения с осью Nг = 0:
0.25 w 1 2 L -у1 - N г2 (2)
РТ
Q ш Q т режим ИХХ
Р 0 - режим ИХХ
Рис.52
Р Q т L -у1 wU L -у1 - режим ДТ
Q ш 0 - режим ДТ
(4)
(1)
1. Построим характеристику N г f ( Q ш ) при 1 const и U = 1
2. Построим характеристику N г f ( Q ш ) при 2 1 и U = 1
Характерные точки: Q т2 w 2 ; Q ш 0.5 w 2 ; N гэ 0.25 w 2
о 1
(4)
М и4
(3)
(2)
1
о 4
Рис.53
(1)
(0)
N г1
- N г2 о 2
М и3 N -М и2
г4
0
М и1
2 L -у1
3. Построим характеристику N г f ( Q ш ) при 3 0 ; Q т 0
Режимы работы ГД на характеристике мощности
Отобразим режим стабилизации скорости на плоскости « М и »
М и 0 - режим ИХХ,
М и М и 0 ( М и1 ) - режимы ДВ,
0 М и М идт (- М и2 ) - режимы РТ,
М и М идт - М и3 - режим ДТ,
М и М и3 (- М и4 ) - режимы ТПВ,
67.
3.2 Характеристики мощности на выходе ГД при стабилизации скорости вращения вала(управляющее воздействие расход Qш на штуцерах ГД)
Уравнения характеристики мощности: N м f ( М и ( М в ));
3.2.1.Характеристики на выходе ГД без учета механических потерь
Уравнение характеристики при const N м М и линейное.
1. Построим характеристику N м f ( М и ) при 1 const и U = 1
N м (Nмв )
М и М ин ; 1 const N м1 1 М ин
1
2. Построим характеристику N м f ( М и ) при 2 1 и U = 1
N г1
(1)
3
N мн
При М и М ин ; 2 const N м2 2 М ин
N об
2 3. Построим характеристику
N м1
N м f ( М и ) при 1 const и U < 1
N г (1)
ДВ
N мн
Nм
4 4. Построим характеристику N м f ( М и ) при 4 0 и U = 1
ИХХ (0)
(Nг1)
М и4 М идт
РТ
(2)
- N м2
(3)
- N м4
М и4 М и3
(2)
о 1
- N м3 1
- N м 2 о 2
-М и2
При
М и1 М ин М и (М ) При 0 N м4 0
- N г2 (М )
в
в1
Режимы работы ГД на характеристике мощности
0
ДТ
тпв (4)
Nм
М и2
(3)
(4)
( const)
- N мдт
- N м4
Рис.54
(1)
(0)
о 4 0
N м1
М и1
Рис.55
М и 0 точка (0) - режим ИХХ,
М и 0 ( М и1 ) точка (1) - режимы ДВ,
0 М и М идт (- М и2 ) точка (2) - режимы РТ,
М и М идт - М и3 точка (3) - режим ДТ,
М и М и3 (- М и4 ) точка (4) - режимы ТПВ,
Потери мощности при стабилизации скорости
Мощность объемных потерь
Отобразим на плоскости « N м - М и » характеристику N г f ( Q ш )
Это парабола, пересекающая ось Nг=0 в режимах ИХХ и ДТ
Мощность объемных потерь N об N г N м
Ми
Мощность механических потерь
Мощность механических потерь при стабилизации скорости
2
Nм Mстр ст f втр ст
const
При их учете характеристику строят на плоскости «
в»
мв
N М
68. Нелинейная математическая модель ГД (при принятых ранее допущениях):
ДИНАМИЧЕСКИЕ МОДЕЛИ И ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГИДРОДВИГАТЕЛЯНелинейная математическая модель ГД (при принятых ранее допущениях):
Уравнение расходов: Q ш Q т Q у Q сж Q пк
V d Р Q
пк
2E dt t
при t max
max
U t
Sign t при t max
wU L у Р
Q т wU - теоретический расход ГД; Q у L у Р - расход утечек;
V d Р - расход сжатия РЖ; Q 0 при Р Р пк
Q сж
пк
2E dt
G пк ( Р Рпк) Sign Р при Р Рпк (Gпк- проводимость ПК).
d
Уравнение моментов: М и М f М трв М трс М дин ; wU Р М f f в М трс Sign J д
dt
М трв f в - момент вязких трений на валу ГД;
М и wU Р - индикаторный момент ГД;
d
М трс Sign при 0
М дин J д J д - динамический момент ГД;
М трс
dt
( М и - М f ) при 0 и М и М f М трс
момент
сухих
трений на валу ГД;
М трс Sign ( М и - М f ) при 0 и М и М f М трс
МТРв
f ТР
Нелинейная структурная схема гидродвигателя
МТРс
QПК
QШ
QУ
QT
1
P
w
LУ
МИ
QСЖ
U
VD
2E
U
1
1
max
w
Рис.56
Мf
М дин
1
JД D
69. Линейная математическая модель гидродвигателя
Допущения при линеаризации:- точка линеаризации { Q шо ; М fо ; U о ; о } выбрана в рабочем диапазоне изменения воздействий;
- переменные имеют малые отклонения от значений в точке линеаризации;
- характеристика сухих трений линеаризована М трc f стл одним из известных методов
(например, гармонической линеаризации);
Разложим уравнения расходов и уравнения моментов в выбранной рабочей точке линеаризации в ряд Тейлора
и ограничимся рассмотрением лишь линейных членов разложения, отбрасывая члены высшего порядка малости.
Переходя от абсолютных значений переменных к их отклонениям от значений в точке линеаризации, получим
линеаризованные уравнения в отклонениях:
Линеаризованное уравнение расходов в отклонениях
Qш Qт Qу Qсж w Uo w o U L у Р Vd P
Q т w U o w о U
Q у L у Р
Q сж Vd Р
2 Edt
(14)
2Edt
Qш Qш Qo
o
U U Uo
Р P - Р о
- отклонения переменных от их
значений в точке линеаризации.
Линеаризованное уравнение моментов в отклонениях
М и М f М трв М трс М дин М f М тр М дин ,
(15)
d
или w U o Р w Р о U М f f трл J д
dt
М f М f М fо
- отклонение моментов от
М и w U o Р w Р о U
d
значений в точке
М дин J д J д их
М тр ( f в f стл ) f трл
линеаризации.
Линеаризованное уравнение движения ГД
dt
V
V
f трл J д L у
2E
2
2E
( 2 2
D 1) (t )
D 2 2
f
f
w Uo L у трл
w Uo L у трл
V
(16)
D
)
w
(
w
L
p
p
U
o
o
o
у
w U Qш (t )
V
L
2E o U(t)
2 2o
2 2 у
(1
D) M f (t )
w Uo L у f трл w Uo Lу f трл 2 Е L у
w2 Uо2 L у f
Jд
трл
70. ЛИНЕАРИЗОВАНАЯ СТРУКТУРНАЯ СХЕМА ГИДРОДВИГАТЕЛЯ
Регулируемый гидродвигательfтрв+fст
Мтр
Qш
QУ
1
P
LУ
QT
W
U0
QСЖ
Р0
VD
2E
МИ
1
JД D
Мf
U
0
W
U0
Рис.57
Нерегулируемый гидродвигатель
fтрв+fст
Мтр
Qш
QУ
1
P
LУ
QT
QСЖ
W
МИ
1
JД D
Мf
VD
2E
W
Рис.58
71. Уравнение движения ГД для изображений
Наряду с дифференциальным уравнением движения ГД используется и уравнениедвижения ГД для изображений переменных по Лапласу или Фурье,
Для его получения перейдем в уравнении (16) и структурных схемах от переменных
во времени к их изображениям по Лапласу
(t) (s) ; U (t) U (s) ; Qш (t) Qш (s) ; Мf (t) Мf (s)
х ( s ) х ( t ) e stdt изображение переменной х ( t ) по Лапласу.
0
S - комплексная переменная
преобразования Лапласа.
Уравнение движения ГД для изображений
V
V
f трл J д L у
2E
2
( 2 2
S 1) ( s )
S 2E2 2
f
f
w Uo L у трл
w Uo L у трл
Jд
w U o Qш ( s )
V
Lу
(
1
S ) M f (s)
2 2
2 2
2Е L у
w Uo L у f трл w Uo L у f трл
или
w( w Uo o L у po
V
po S )
2E
U(s)
w2 Uо2 L у f трл
T s T1s 1 (s) K Qш (s) K (1 T s) M (s) K (1 T s)U (s)
2 2
2
*
f
(17)
сж
f
U
сж
(18)
w U0
- коэффициент передачи ГД по входу Qш (добротность по скорости);
2 2
w U0 L у f трл
Lу
- коэффициент передачи ГД по возмущающему воздействию Мf;
Kf 2 2
w U0 L у f трл
;
w( w U0 0 L у p0) - коэффициент передачи ГД по управляющему воздействию
U;
Ku
2 2
w U0 L у f трл
v
V
f трл J д L у
Jд
V
*
Тсж
- постоянные времени.
2E
2E
Т
;
сж
Т
; T2 2 2
; сж
T1 2 2
w
U
0
0
2E L у
1
w U0 L у f трл
w U0 L у f трл
Lу Р0
где:
K
72. ПЕРЕДАТОЧНЫЕ ФУНКЦИИ ГИДРОДВИГАТЕЛЯ
Передаточные функции ГД по управляющим и возмущающим воздействиям могут быть полученыиз линеаризованного уравнения движения (17) или (18),и по линеаризованным структурным
схемам Рис.57 и Рис.58.
WQ s
K
(19)
-передаточная функция по управляющему воздействию Qш
s
1
T s T1
;
1 s -передаточная функция по возмущающему воздействию Мf ; (20)
Wf s K2f 2 Tсж
T2s T1s 1
*
K
U 1 Tсж s
-передаточная функция по управляющему воздействию U ; (21)
WU s 2 2
T2s T1s 1
2 2
2
Передаточные функции гидродвигателя описывают динамические процессы в нем, и по ним
могут строиться временные и частотные характеристики двигателя.
Вид переходного процесса разгона вала двигателя при управлении расходом на его штуцерах
определяется значениями постоянных времени.
При Т1 2 Т2 процесс разгона вала двигателя будет монотонным, а при
T1 Тм
J Д Lу
v
2E
f трл
w U0 L у f трл
2
V
Тсж 2E
Lу
Т1 2 Т2 - колебательным.
При пренебрежимо малых трениях двигателя ( f трл 0 ):
2
T1 Тм
Jд Lу
2 2
w U0
- гидромеханическая постоянная времени.
- постоянная сжатия рабочей жидкости в гидравлической цепи двигателя.
Т2 ТМ Тсж
V
J д 2E
.
2
2
w U0
73. ХАРАКТЕРИСТИКИ ВСПОМОГАТЕЛЬНЫХ ЭЛЕМЕНТОВ ГИДРОПРИВОДА
КЛАПАНЫОбратный клапан
с
При турбулентном движении жидкости на дросселирующих окнах расход жидкости
через окно определяется выражением:
Р2
Qок
Qок bок хок
хок
Р1
- коэффициент расхода окна;
хок - высота окна; - плотность жидкости;
2
P1 P2 Gок Рок
bок π dок - ширина окна;
, где:
Gок –гидравлическая проводимость окна;
Рок – перепад давления на окне.
Пренебрегая массой шарика и динамическими процессами при его перемещении, запишем
Уравнение расходно-перепадной характеристики обратного клапана
при (Р1 – Р2) 0
0
Qок
dок
Рис.59 Расчетная схема ОК
P1 P2
при (Р1 – Р2)
F(P1)= F(P2)+Fп или SпкР1=SпкР2+С(Х0+Хпк) ,
где:
х пк
Р1
dпк
(22)
0
Переливной (предохранительный) клапан
При тех же допущениях уравнение равновесия сил, действующих на шарик:
Р2
QПК
bок xок
2
Sпк
2
d
пк
4
(23)
-эффективная площадь воздействия на шарик давлений Р1 иР2;
С - жесткость пружины; Х0 – начальное поджатие пружины;
С Х0
= Рпк – давление настройки предохранительного клапана.
Sпк
Хпк Sпк Р1 Р2 Х0 Sпк ( Р - Рпк) Sпк Рпк
С
С
С
Уравнение расходно-перепадной характеристики предохранительного клапана
Рис.60 Расчетная схема ПК
Qпк
0
bок Sпк Рпк 2 P1 P2
С
при (Р1 – Р2) Рпк
при (Р1 – Р2)
Рпк , где: bок =
(24)
d пк
74. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ВСПОМОГАТЕЛЬНЫХ ПОДСИСТЕМ ГИДРОПРИВОДА
Система ограничения давления в силовых гидролиниях гидроприводаР1
ПК
Принципиальная гидравлическая схема системы ограничения давлений приведена
на Рис.61 и включает в себя два предохранительных клапана, включенных встречнопараллельно между силовыми гидролиниями системы.
Характеристика каждого ПК при принятых допущениях описывается уравнением
(24). С учетом Р Рпк оно может быть представлено в виде:
ПК
0
Qпк
Р2
Рис.61
dпк Sпк Рпк 2 Р- Рпк Gпк Рпк
С
при (Р1 – Р2) Рпк
при (Р1 – Р2)
Рпк ,
(25)
где: Gпк – гидравлическая проводимость предохранительного клапана.
Соответствующая уравнению (25) расходно- перепадная характеристика
предохранительного клапана представлена на Рис.62
Qпк
Рпк
tg = Gпк =
Р
Рпк
dпк Sпк Рпк 2
С
Рис.62
Уравнение расходно–перепадной характеристики системы ограничения давлений
по схеме Рис.61:
Qпк
Qпк
Рпк
Рис.63
Р
Рпк
Р
0
dпк Sпк Рпк 2 / Р/ - Рпк Sign P
С
при /
P/ Рпк
при /
P/
Рпк ,
Соответствующая уравнению (26) расходно-перепадная характеристика
системы ограничения давлений по схеме Рис. 61 приведена на Рис.63
(26)
75. Гидравлические аккумуляторы и гасители пульсаций давления
Гидроаккумулятор – устройство, предназначенное для накопления энергии рабочей жидкости под давлением и ееиспользования для создания (поддержания) давления в гидролинии при изменяющемся расходе рабочей жидкости.
В гидравлических схемах гидроаккумуляторы (ГА) используются по двум основным назначениям:
1- дополнительный источник гидравлической энергии; 2 - гаситель пульсаций давления.
По конструкции аккумуляторы подразделяются на несколько видов:
- грузовые, пружинные или гидропневматические;
- поршневые или мембранные и т.д.
Схема пружинного, поршневого гидроаккумулятора приведена на Рис.64
При давлении в гидролинии равном Р поршень под действием давления переместится на
2
величину Х, сжимая пружину, которая запасет энергию W п С / 2 , С – жесткость пружины.
При увеличении давления на Р поршень переместится и сожмет пружину еще на Х, при
этом ее запас энергии возрастет.
При уменьшении давления в гидролинии поршень под действием силы пружины будет
Х перемещаться вниз, выталкивая жидкость в гидролинию, поддерживая в ней давление.
Уравнение движения поршня при изменении давления
2
Х
d
(27)
X f трп d X C X Sп Р,
mn
Qга
Р+
d t2
Р
V s р,
Рис.64
ОК
Р+
dt
где: mп, Sп, fтрп – соответственно масса, площадь и коэффициент трений поршня.
Учитывая, что Sп Х = V – изменение объема под поршнем, запишем:
2
(mп D2 f трп D C)
п
Поделив левую и правую часть уравнения на t и устремив t к 0, получим уравнение ГА
2
dV
f трп
s
m
п
п
2
– расход ГА. (28)
(
D 1) Qга Dp, Qга
D
Р г Vг
Vг
Р
Qга
С
С
dt
Схема гидропневматического, мембранного аккумулятора приведена на Рис.65.
В аккумуляторах этого типа роль пружины играет газ под давлением, а роль разделителя
жидкостной и газовой сред – эластичная мембрана. Пренебрегая массой мембраны, ее
жесткостью и внутренними трениями, при
Р << Р запишем для ГА этого типа
VГ VГ Р; так как VГ Vж ;
ЕГ
Рис.65
С
D d dt
Qга = VГ d Р;
ЕГ dt
(29)
Аккумуляторы этого типа имеют высокое быстродействие. Они часто используются в
качестве гасителя пульсаций давления в гидролиниях.
76. СТАБИЛИЗИРОВАННЫЕ ИСТОЧНИКИ ГИДРОПИТАНИЯ (НАСОСНЫЕ СТАНЦИИ ГИДРОПИТАНИЯ )
Источники гидропитания подразделяются на источники постоянного расхода и источники постоянного давления.В гидроприводах дроссельного регулирования и системах подпитки рабочей жидкостью, как правило, используются
стабилизированные источники давления (СИД). Они строятся на базе гидронасосов как постоянной, так и переменной
производительности.
Гидравлическая схема СИД с нерегулируемым гидронасосом приведена на Рис.66.
Вал насоса приводит во вращение приводной двигатель (ПД) с жесткой механической
характеристикой ( const). Стабилизацию давления в напорной гидролинии осуществляет
переливной клапан(ПК),сбрасывающий избыток жидкости через теплообменник(ТО) в бак
ГА
пополнительный(БП),а также гидроаккумулятор(ГА), гасящий пульсации давления(Рп).
Qгап Рп Qпот
Уравнение расходов в напорной гидролинии
ГН ПП
нп
Qнп
Qнп = Qтнп – Qунп – Qсжп = Qгап +Qпкп +Qпот,
Qпкп
ПД
где: Qтнп= W нп нп - теоретический расход насоса станции гидропитания;
Qунп=LунпРп - расход утечек насоса станции гидропитания;
ПК
Мfп
ТО
Ф
Qсл
БП
Рис.66
Qгап
Qпот
нп
Qтнп
Lунп
Qпкп
Jнп d
dt
Мднп
Мтрнп
Vг d
Ег dt
1
W нп
(30)
Qсжп = Vж dPп -расход сжатия жидкости в напорной магистрали;
Еж dt
Qгап = Vг dPп - расход гидроаккумулятора станции гидропитания (Qгап>>Qсжп);
Ег dt
0
при (Рп) Рпк - расход переливного
2
S
пкп
Qпкп =
- при (Рп) Рпк клапана;
dпкп
Рп
С
Рпкп
Рп Рпкп
Уравнение моментов на валу насоса станции гидропитания
Мfп = Минп +Мтрнп +Мдиннп,
(31)
где: Мfп – момент на валу насоса (момент приводного двигателя);
Минп = W нпРп –индикаторный момент насоса станции гидропитания;
Мднп = Jнп d нп- динамический момент на валу насоса.
dt
Минп
Мтрнп – момент сухих и вязких трений на валу насоса;
W нп
Мfп
Рис.67
Структурная схема стабилизированного источника гидропитания,
соответствующая уравнениям (30) и (31) приведена на Рис.67.
77. Стабилизированный источник давления с регулируемым гидронасосом
Гидравлическая схема СИД с регулируемой аксиально-поршневой гидромашиной приведена на Рис.68.На базе регулируемого насоса реализуется система стабилизации с обратной связью по давлению. Суммирование
задаваемого сигнала Fрз и сигнала обратной связи Fрос часто осуществляют на органе регулирования насоса.
Предохранительный клапан настроен на давление Рпк > Рп и ограничивает давление в напорной гидролинии лишь в
аварийных ситуациях. Гидроаккумулятор сглаживает пульсации давления Рп.
СИД этого типа экономичнее, т.к. регулируют подачу насоса в соответствии с изменениями расхода Qпот.
Математическая модель СИД с регулируемым гидронасосом
Считая, что люлька уравновешена и гидростатически разгружена относительно оси
вращения, а сухие трения малы, запишем уравнение моментов на оси люльки.
ГА
ГН ПП
Qгап
Qнп
нп Мfп
Рп
rл
ПК
Ф
Fрз
Рис.68
Qпот
1 Uнп
m
Wнп нп
SцосrлD
m
2
2
d
d
rлFрз – rлSцосРп = Jл 2 + fтрл
= (JлD + fтрлD)
dt
dt
Qпкп
ПД
Цос
Qпот
где: Jл – момент инерции люльки относительно оси поворота;
rл – радиус приложения (плечо) управляющих воздействий на люльку;
Qсл
Sцос – площадь цилиндра обратной связи на люльку по давлению Рп;
fтрл – коэффициент вязких трений на оси люльки,
ТО
Fрз=SцосРз - управляющее усилие на люльку, соответствующее
БП
задаваемому давлению стабилизации Рз.
Уравнение расходов в напорной гидролинии
d
Qгап Vг
d
D
U НП QЦОС Vг РП VЖ PП LУНП РП QПОТ QПКП 0 (33)
w
НП
Ег
Ег dt
ЕЖ dt
Qтнп
1
Lунп
Qцос
1
D(JлD+fтр)
Qпкп
Мрз
Sцосrл
Рис.69
(32)
Рз
Sцосrл
Рп
где: Qцос = SцосrлD - расход цилиндра обратной связи;
Uнп =
m
- параметр регулирования насоса;
Структурная схема стабилизированного источника давления,
соответствующая (32) и (33),приведена на Рис.69.
При ее построении было принято: нп = const; Qcжп = 0;
Для области режимов работы СИД, в которых < m и Рп < Рпкп
по структурной схеме Рис.69 могут быть получены передаточные
функции стабилизированного источника давления.