










 Программное обеспечение
Программное обеспечениеПохожие презентации:










Создание 3D модели квадрокоптера
1.
Муниципальное бюджетное общеобразовательноеучреждение Гимназия №96 г. Казань
Создание 3D модели квадракоптера
Инженеры 10 И класса
Анисимов
Фёдор,
Максим
Паранин,
Хохряков Владимир
2.
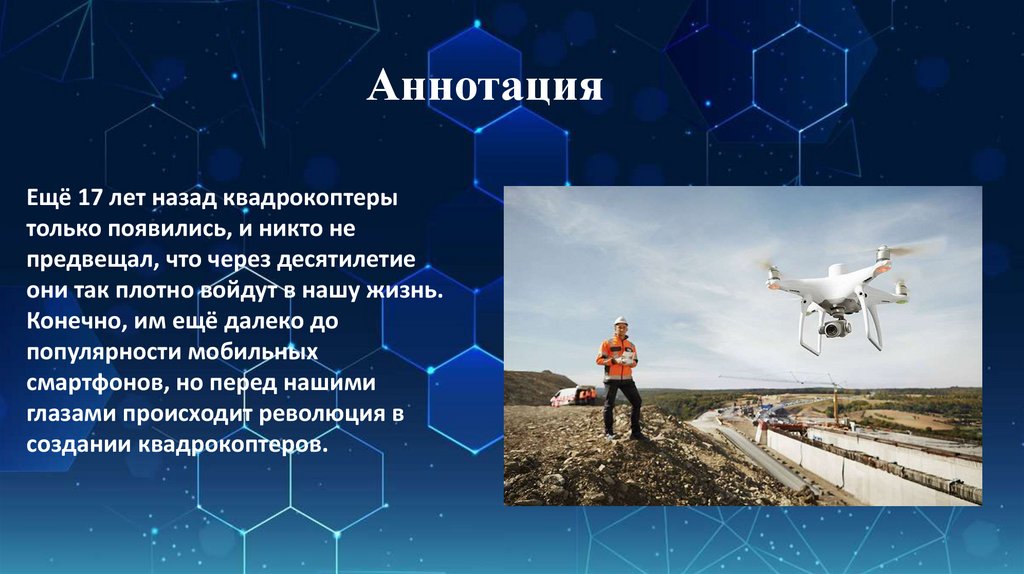
АннотацияЕщё 17 лет назад квадрокоптеры
только появились, и никто не
предвещал, что через десятилетие
они так плотно войдут в нашу жизнь.
Конечно, им ещё далеко до
популярности мобильных
смартфонов, но перед нашими
глазами происходит революция в
создании квадрокоптеров.
3.
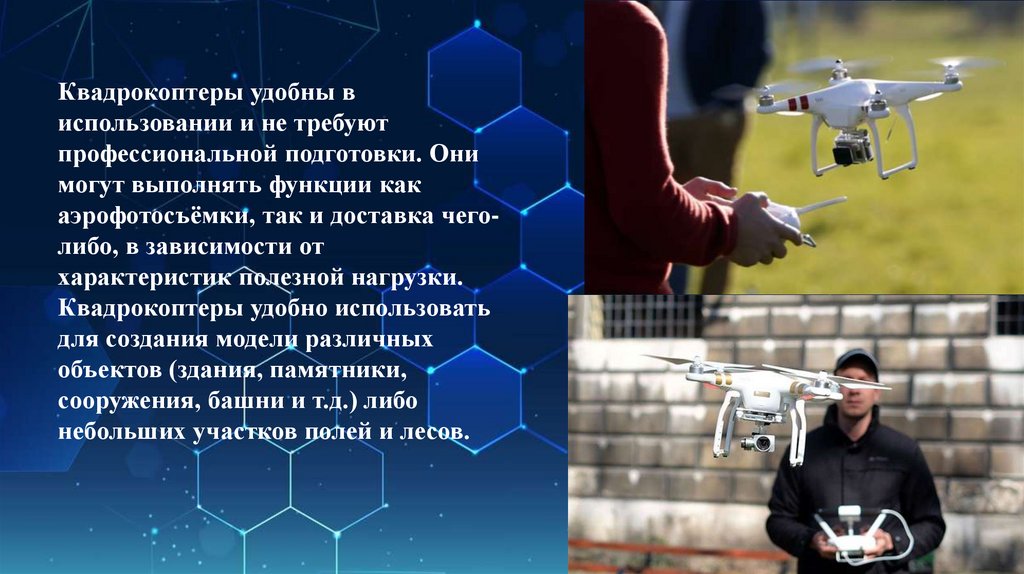
Квадрокоптеры удобны виспользовании и не требуют
профессиональной подготовки. Они
могут выполнять функции как
аэрофотосъёмки, так и доставка чеголибо, в зависимости от
характеристик полезной нагрузки.
Квадрокоптеры удобно использовать
для создания модели различных
объектов (здания, памятники,
сооружения, башни и т.д.) либо
небольших участков полей и лесов.
4.
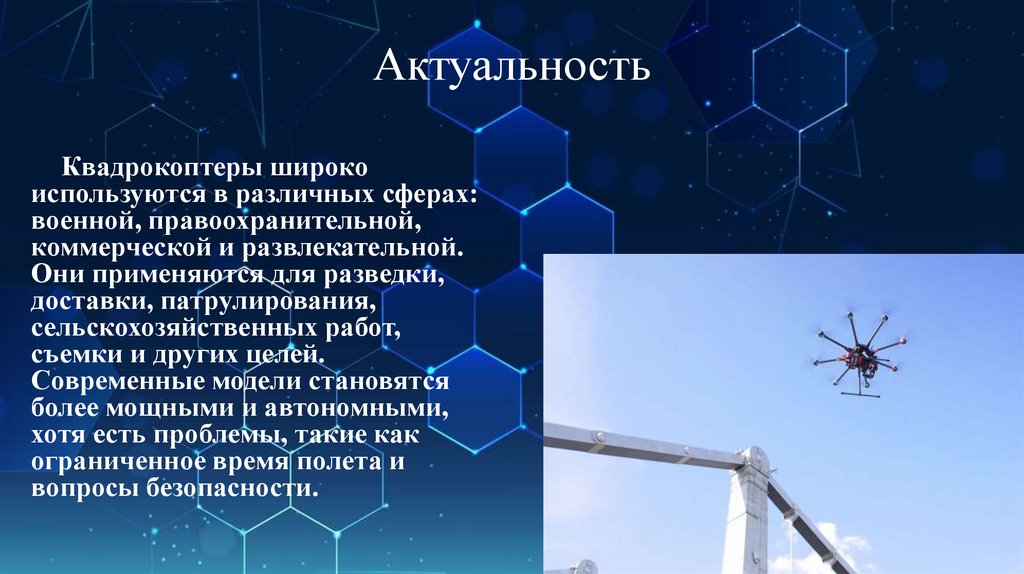
АктуальностьКвадрокоптеры широко
используются в различных сферах:
военной, правоохранительной,
коммерческой и развлекательной.
Они применяются для разведки,
доставки, патрулирования,
сельскохозяйственных работ,
съемки и других целей.
Современные модели становятся
более мощными и автономными,
хотя есть проблемы, такие как
ограниченное время полета и
вопросы безопасности.
5.
В нашей же работе мы решилисмоделировать квадракоптер, который
закроет выше перечисленные
недостатки. Наш квадракоптер
отличается от других тем, что может
гарантированно находится в воздухе
1час, также полностью смодулирован
нами.
6.
Цель работыЦелью данной работы было
смодулировать квадракоптер,
который сможет выполнять
несколько функций: сможет
летать с высоты птичьего полёта;
определять, где находится пожар
на удалённом расстоянии; делать
снимки и видеосъёмки с высоты
для запечатления открытых
территорий. Для достижения
цели мы выбрали (такие-то
материалы) и разработали 3D
модель квадракоптера в компасе.
7.
Задачи• Исследование темы.
• Подборка материалов и схематичный
рисунок 3D модели
• Разработка готового корпуса в компасе,
который устойчив к внешним
воздействиям.
• Сделать чертежи по 3D модели
• Рассказать, как собрать квадракоптер
• Показать какие были первые коцепции
квадракоптера в истории
• Рассказать движение квадракоптера:
рыскание, тангаж, крен
• Структура и компоненты квадракоптера
• Сделать соответствующий вывод
8.
Положительные стороны• Удобна в использовании для переноски
вещей.
• Способность зависания на месте, что
позволяет сделать хорошие снимки.
• Нет сложности в управлении, что не требует
профессиональной подготовки.
• Высокая мобильность в сложных условиях.
• Дальность полёта до 1км.
• Время полёта гарантированно до 1 часа и
более
• Устойчив к внешним воздействиям, что
продлевает срок службы
• Данная модель многофункцианальна из-за
чего может выполнять несколько разных
поставленных задач.
9.
3D модель квадракоптера и запчастей10.
Первые концепции квадракоптеровВ 1922 году русско-американский
авиаконструктор Георгий
Александрович Ботез создал первый в
мире работающий квадрокоптер,
который смог подняться в воздух и
оставаться там некоторое время.
Экспериментальный летательный
аппарат Curtiss-Wright VZ-7,
напоминающий современные дроны,
успешно прошел начальные испытания
и показал хорошие результаты военным.
11.
Фау-1, самолет-снаряд нацистскойГермании времен Второй мировой войны,
стал первым управляемым дроном,
открыв путь к более совершенным
моделям. В 2013 году был представлен
первый квадрокоптер серии Phantom,
который заложил основу для развития
дронов Phantom.
С этого момента дроны стали все более
популярными и разнообразными,
предоставляя широкие возможности как
для работы, так и для развлечений.
История дронов — это увлекательное
путешествие от первых экспериментов до
современных автономных летательных
аппаратов.
12.
Управлениеквадракоптера
Сердцем системы управления дрона
является контроллер, его главная задача
- управлять регуляторами оборотов. Эти
регуляторы, в свою очередь, отвечают за
скорость вращения лопастей, определяя
тем самым скорость и маневренность
дрона.
13.
Схема также демонстрирует наличиерадиоприемника, который позволяет
осуществлять дистанционную
настройку контроллера с помощью
мобильного приложения на вашем
телефоне. Это дает
возможность управлять параметрами
дрона без физического доступа к нему.
И, наконец, GPS-трекер,
установленный на дроне, отслеживает
его местоположение и передает данные
на устройство отслеживания. Благодаря
этому вы всегда можете знать, где
находится ваш дрон, и, если
необходимо, осуществить его поиск.
14.
Движение квадракоптера: рыскание, тангаж, кренРыскание — это вращение или поворот
квадрокоптера вправо или влево. Это основное
движение для вращения мультикоптера. На
большинстве дронов это достигается с помощью
левой ручки газа влево или вправо. .
Наклоняется дрон тогда, когда обороты левой и
правой пар двигателей различны. Если
уменьшить обороты левой пары двигателей, дрон
произведет наклон влево. Если обороты правой
пары будут меньше, чем у левой, произойдет
наклон квадрокоптера вправо.
15.
Тангаж — это движение квадрокоптеравперед или назад. Подача вперед обычно
достигается нажатием ручки газа вперед.
Шаг назад достигается перемещением ручки
газа назад. Большая сила в задней части
дрона означает, что он наклонится вперед.
Чтобы лететь вперед, необходимо увеличить
число оборотов двигателя задних роторов
квадрокоптера
и
уменьшить
частоту
вращения передних роторов, а если нужно
назад, то наоборот.
Крен
–
это
движение,
которое
заставляет квадрокоптер лететь вбок,
влево или вправо. Он управляется правой
ручкой газа, заставляя его летать слева
направо.
16.
Структура и компоненты квадрокоптера17.
ВыводВсе цели и задачи были достигнуты.
Мы создали 3D корпус, который сможет
выполнять несколько функций: сможет
летать с высоты птичьего полёта;
определять, где находится пожар на
удалённом расстоянии; делать снимки и
видеосъёмки с высоты для запечатления
открытых территорий. Изучены первые
концепции квадрокоптеров, которые
стали основой для разнообразного и
расширяющегося мира беспилотников.
Были изучены тангаж, крен и рысканье,
а также движение пропеллеров при этих
различных движениях.