








 Электроника
ЭлектроникаПохожие презентации:










Доплеровский измеритель скорости и угла сноса. Радиовысотомер
1. Доплеровский измеритель скорости и угла сноса. Радиовысотомер
2.
Доплеровский метод измерения скорости и угла сносаПредназначен
для
автоматического
непрерывного
измерения модуля путевой скорости (W), составляющих
вектора скорости и угла сноса.
Измеренные
ДИСС
параметры
используются
определения местоположения ЛА методом счисления пути.
для
3.
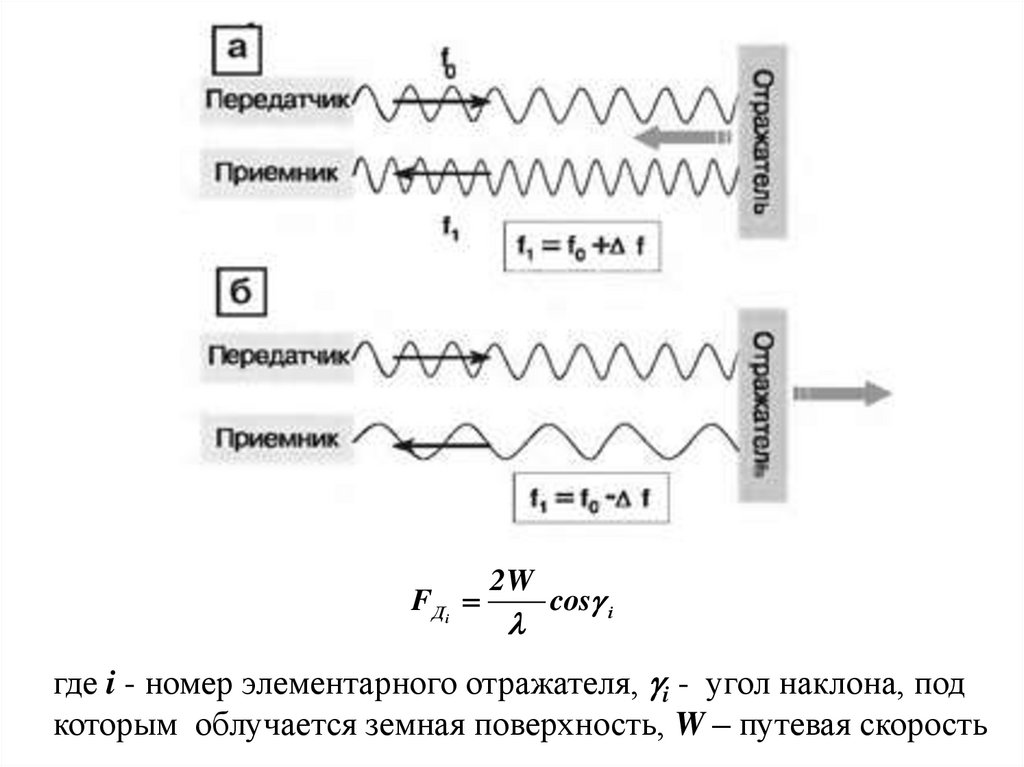
FД i2W
cos i
где i - номер элементарного отражателя, i - угол наклона, под
которым облучается земная поверхность, W – путевая скорость
4.
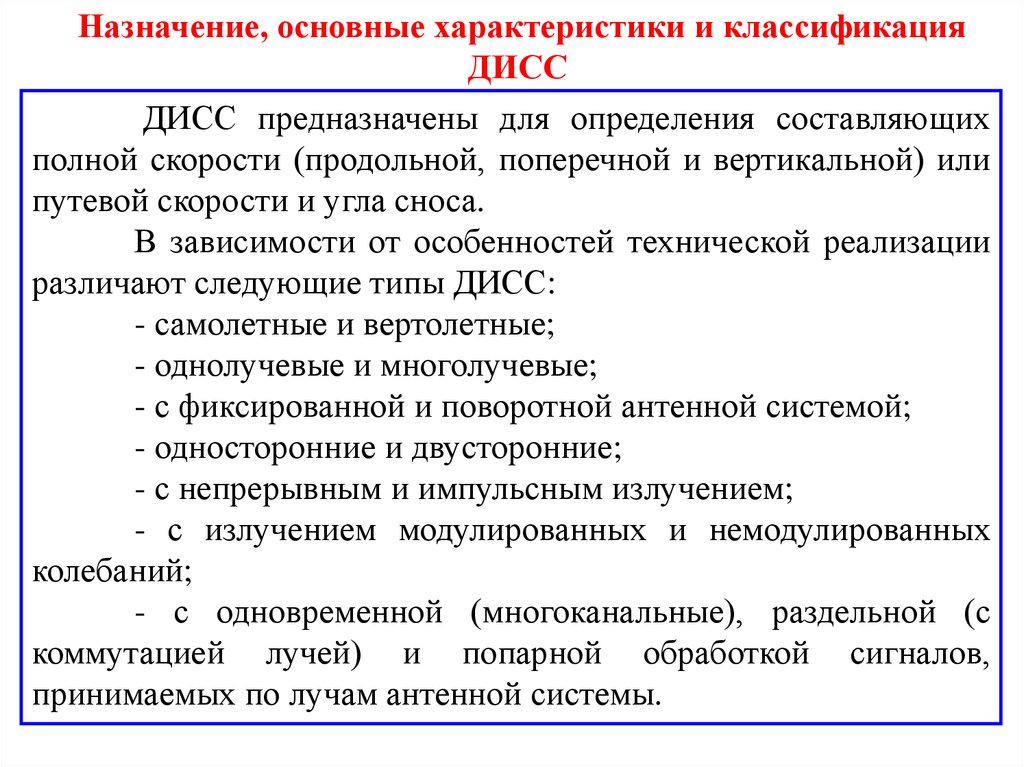
Назначение, основные характеристики и классификацияДИСС
ДИСС предназначены для определения составляющих
полной скорости (продольной, поперечной и вертикальной) или
путевой скорости и угла сноса.
В зависимости от особенностей технической реализации
различают следующие типы ДИСС:
- самолетные и вертолетные;
- однолучевые и многолучевые;
- с фиксированной и поворотной антенной системой;
- односторонние и двусторонние;
- с непрерывным и импульсным излучением;
- с излучением модулированных и немодулированных
колебаний;
- с одновременной (многоканальные), раздельной (с
коммутацией лучей) и попарной обработкой сигналов,
принимаемых по лучам антенной системы.
5.
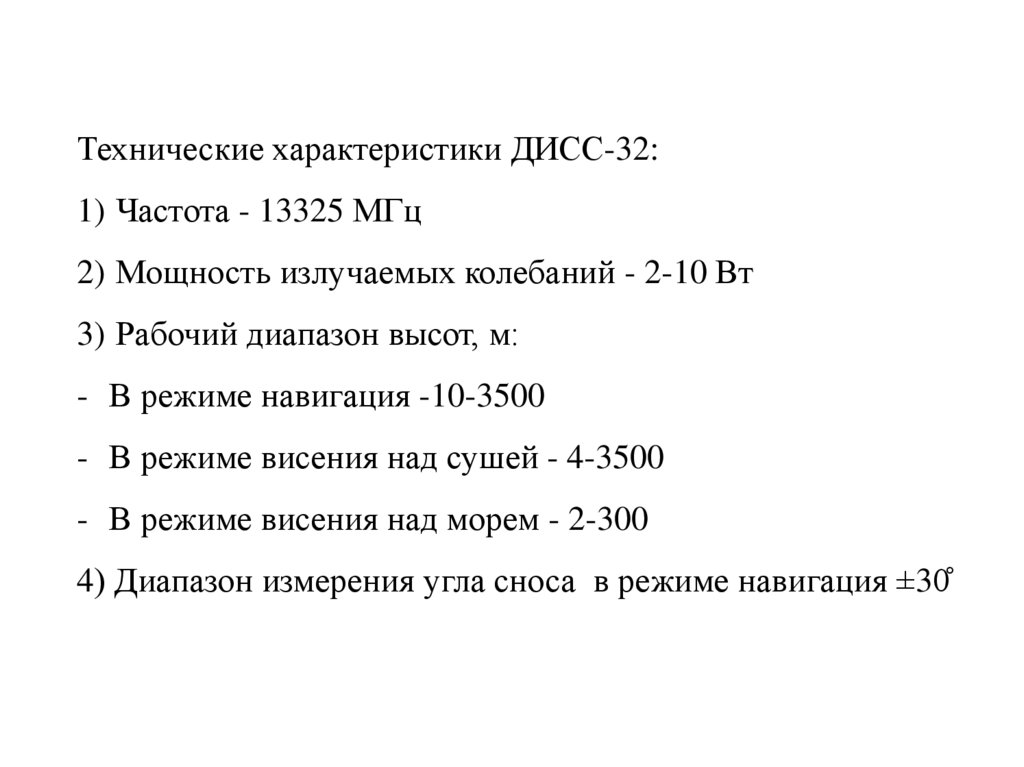
Технические характеристики ДИСС-32:1) Частота - 13325 МГц
2) Мощность излучаемых колебаний - 2-10 Вт
3) Рабочий диапазон высот, м:
- В режиме навигация -10-3500
- В режиме висения над сушей - 4-3500
- В режиме висения над морем - 2-300
4) Диапазон измерения угла сноса в режиме навигация ±30̊
6.
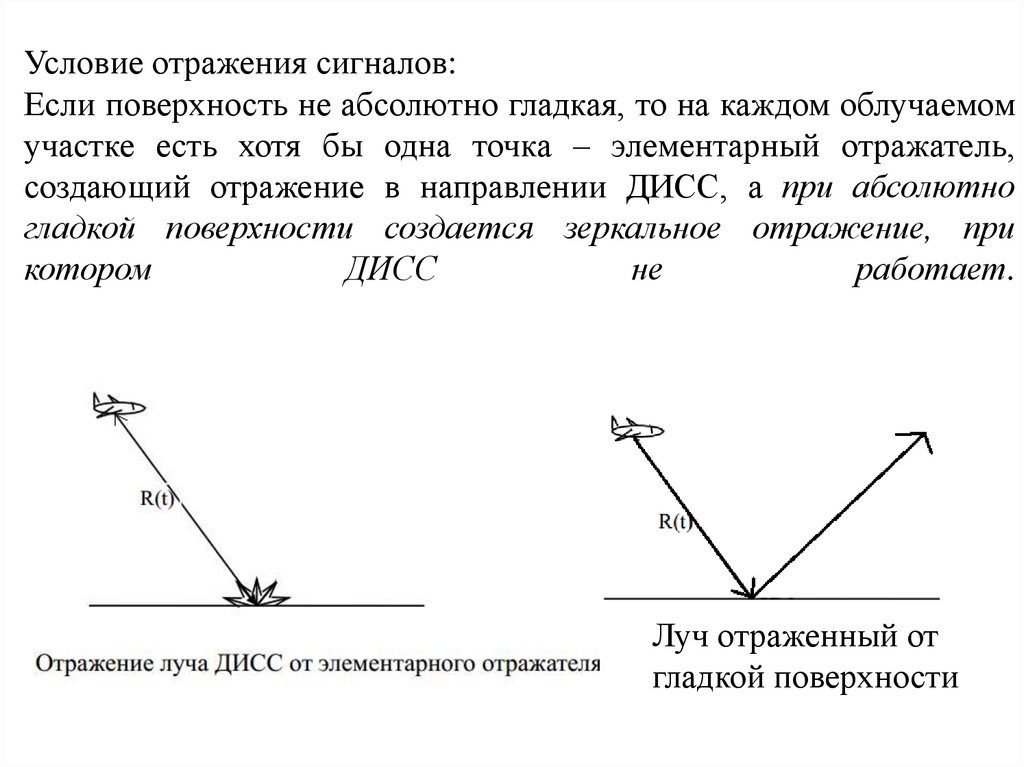
Условие отражения сигналов:Если поверхность не абсолютно гладкая, то на каждом облучаемом
участке есть хотя бы одна точка – элементарный отражатель,
создающий отражение в направлении ДИСС, а при абсолютно
гладкой поверхности создается зеркальное отражение, при
котором
ДИСС
не
работает.
Луч отраженный от
гладкой поверхности
7.
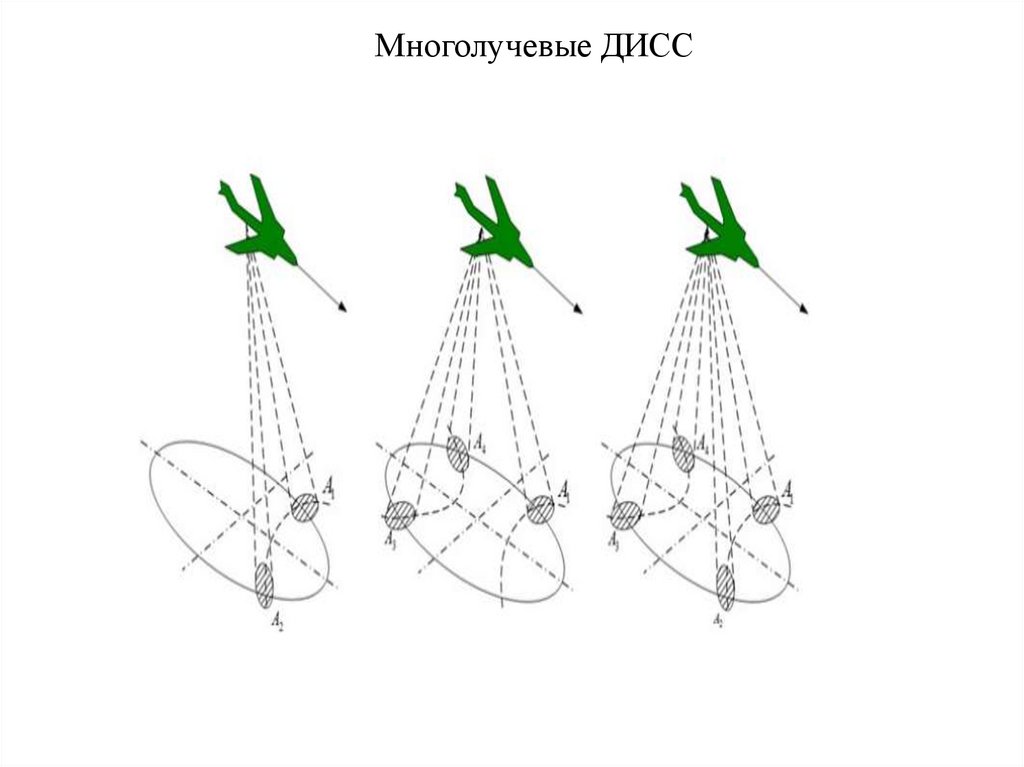
Многолучевые ДИСС8.
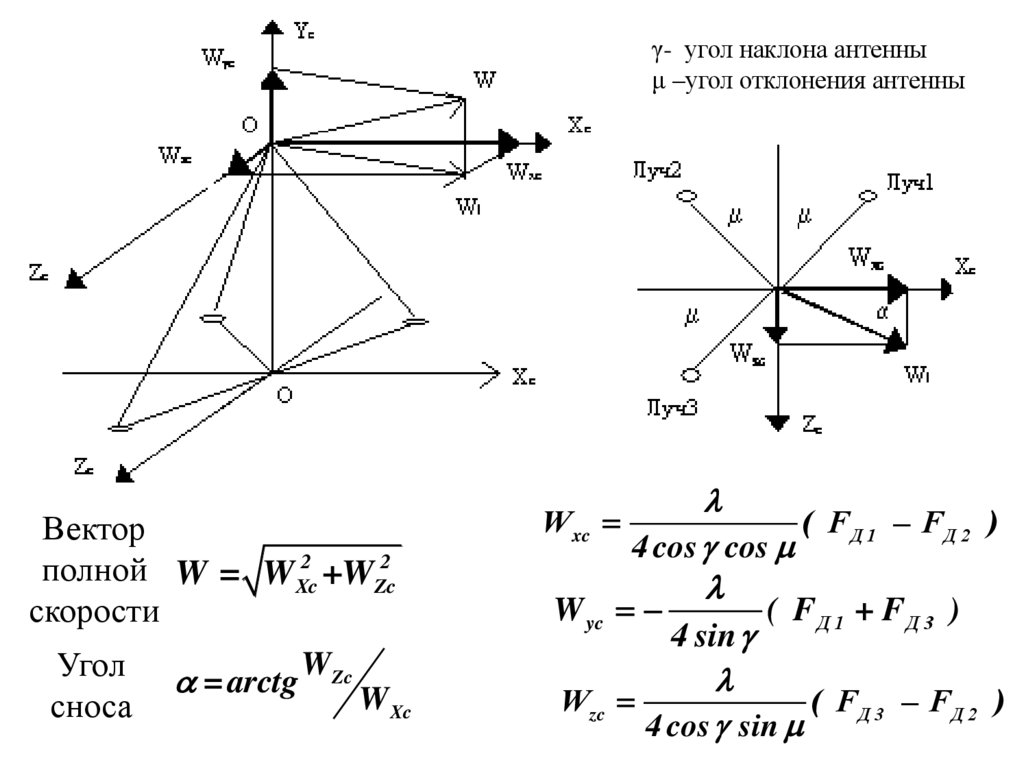
γ- угол наклона антенныμ –угол отклонения антенны
Вектор
полной W = WXc2 +WZc2
скорости
Угол
сноса
= arctg
WZc
W Xc
W xc
( FД 1 – FД 2 )
4 cos cos
W yc
( FД 1 + FД 3 )
4 sin
Wzc
( FД 3 – FД 2 )
4 cos sin
9.
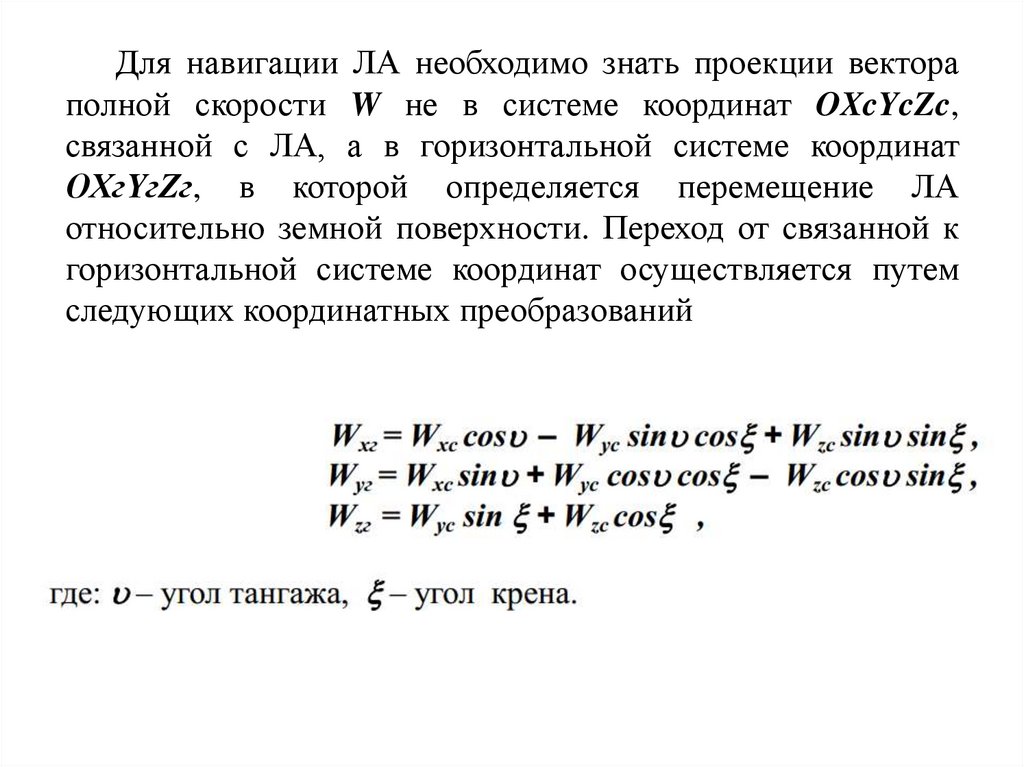
Для навигации ЛА необходимо знать проекции вектораполной скорости W не в системе координат OXcYcZc,
связанной с ЛА, а в горизонтальной системе координат
OXгYгZг, в которой определяется перемещение ЛА
относительно земной поверхности. Переход от связанной к
горизонтальной системе координат осуществляется путем
следующих координатных преобразований
10. Доплеровский измеритель скорости и угла сноса
11. Обобщенная структурная схема ДИСС
ƒпр.- частота принятого сигналаƒ0 - частота излучаемого сигнала
Fд – Доплеровская частота
12.
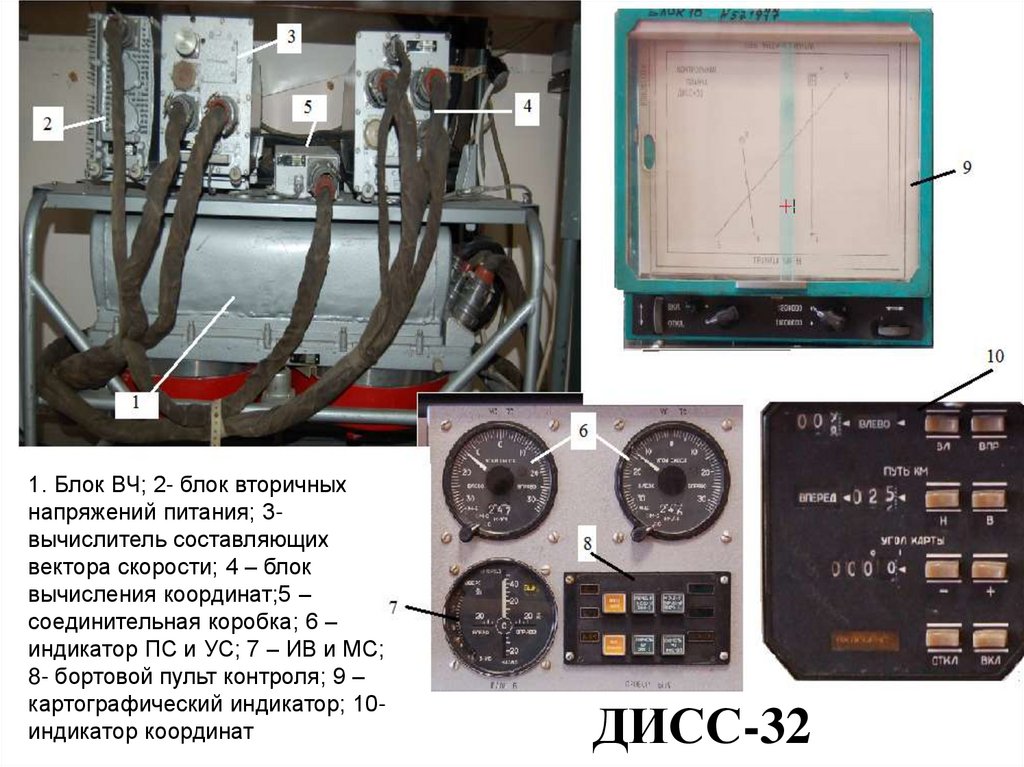
ДИСС-3213.
1. Блок ВЧ; 2- блок вторичныхнапряжений питания; 3вычислитель составляющих
вектора скорости; 4 – блок
вычисления координат;5 –
соединительная коробка; 6 –
индикатор ПС и УС; 7 – ИВ и МС;
8- бортовой пульт контроля; 9 –
картографический индикатор; 10индикатор координат
ДИСС-32
14.
ДИСС-016ДИСС-15
15.
ДИСС-01316.
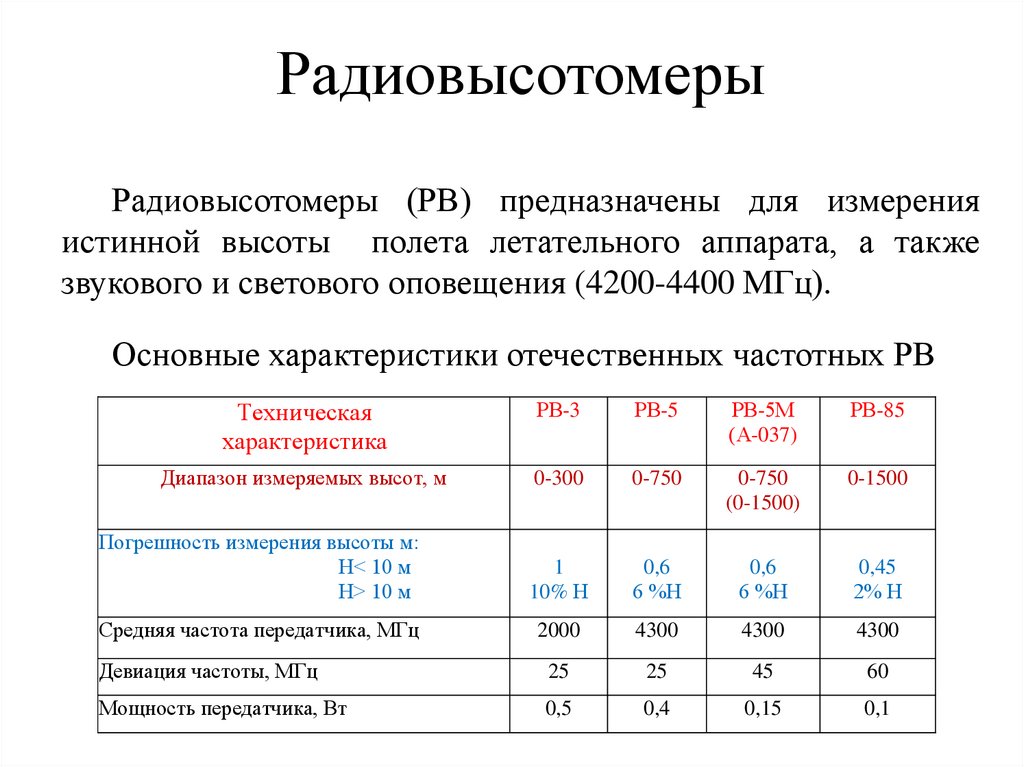
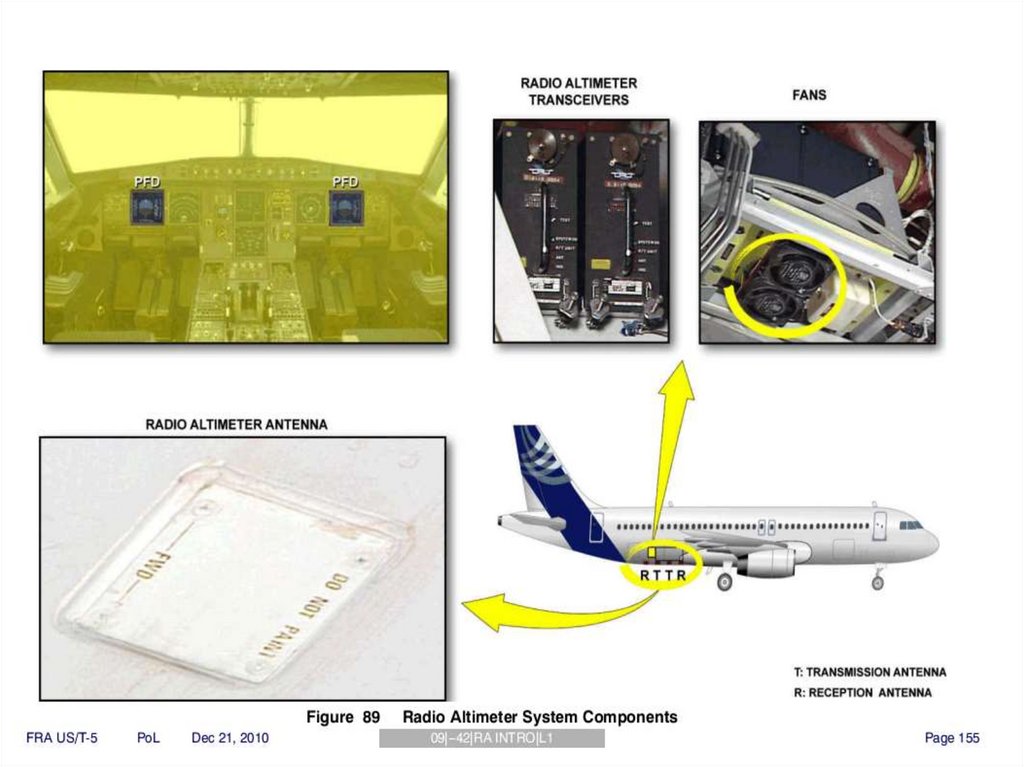
РадиовысотомерыРадиовысотомеры (РВ) предназначены для измерения
истинной высоты полета летательного аппарата, а также
звукового и светового оповещения (4200-4400 МГц).
Основные характеристики отечественных частотных РВ
Техническая
характеристика
РВ-3
РВ-5
РВ-5М
(А-037)
РВ-85
Диапазон измеряемых высот, м
0-300
0-750
0-750
(0-1500)
0-1500
Погрешность измерения высоты м:
Н< 10 м
Н> 10 м
1
10% Н
0,6
6 %Н
0,6
6 %Н
0,45
2% Н
Средняя частота передатчика, МГц
2000
4300
4300
4300
Девиация частоты, МГц
25
25
45
60
Мощность передатчика, Вт
0,5
0,4
0,15
0,1
17.
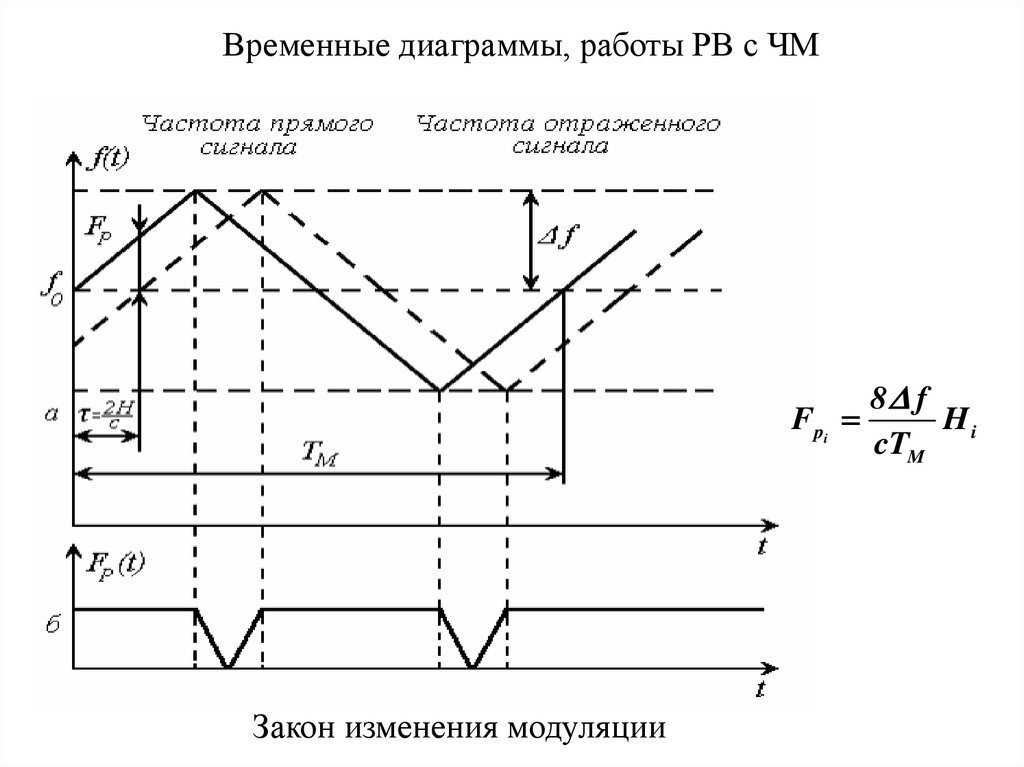
Временные диаграммы, работы РВ с ЧМ8 f
Fpi
Hi
cTM
Закон изменения модуляции
18.
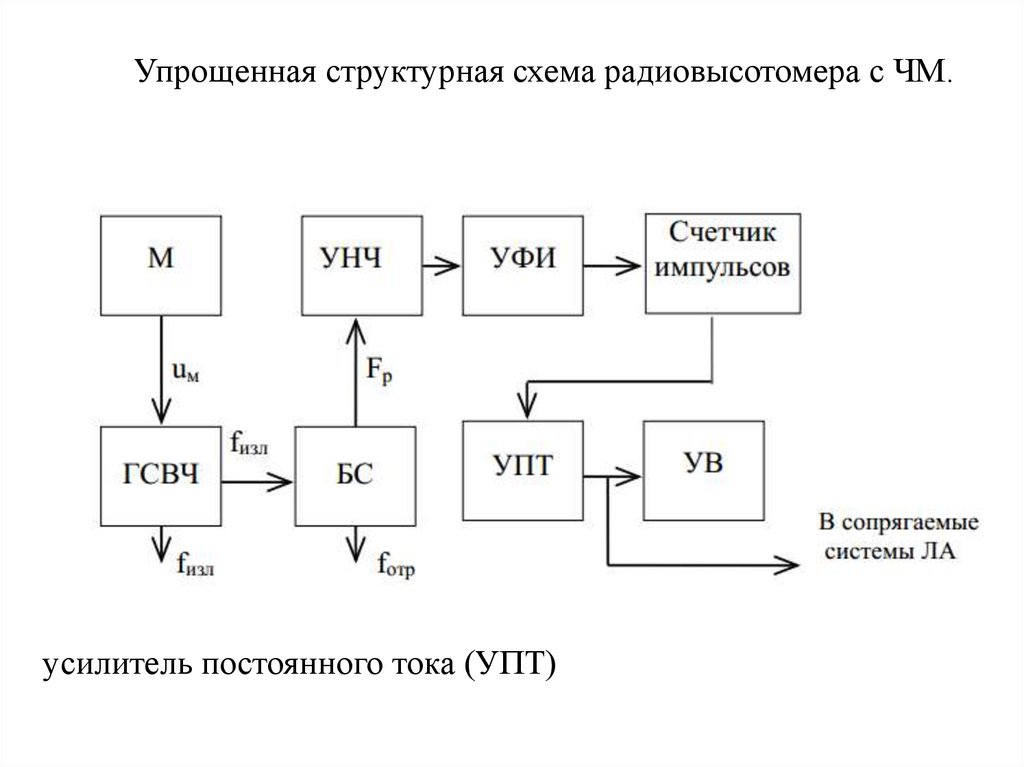
Упрощенная структурная схема радиовысотомера с ЧМ.усилитель постоянного тока (УПТ)
19.
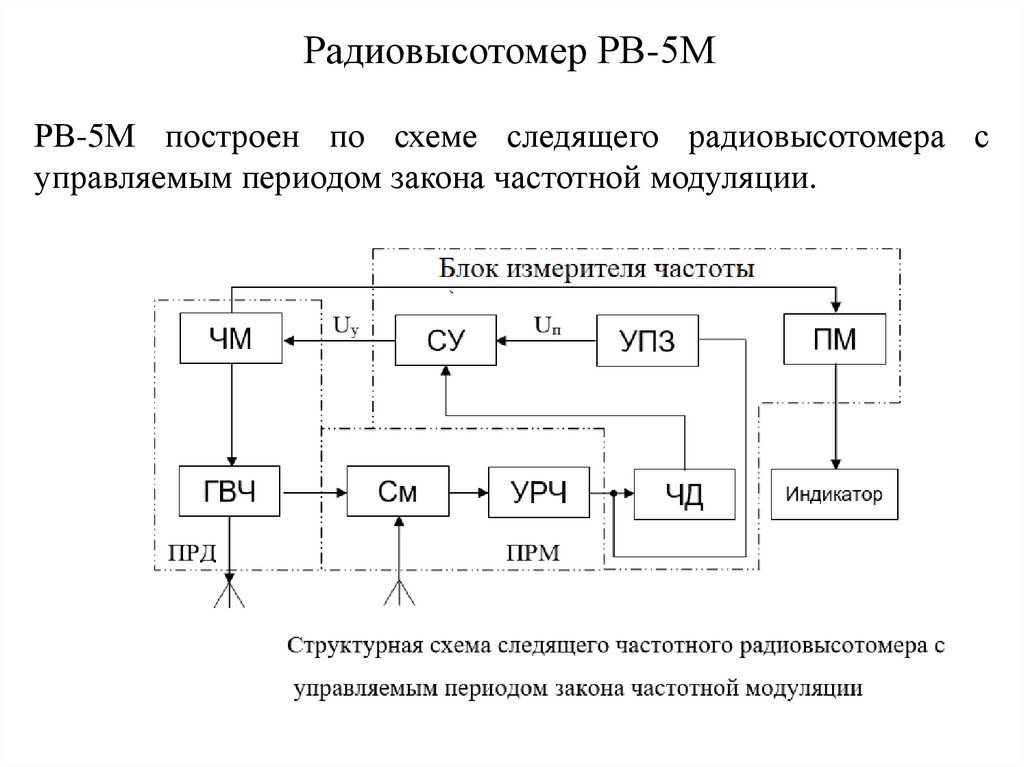
Радиовысотомер РВ-5МРВ-5М построен по схеме следящего радиовысотомера с
управляемым периодом закона частотной модуляции.
20.
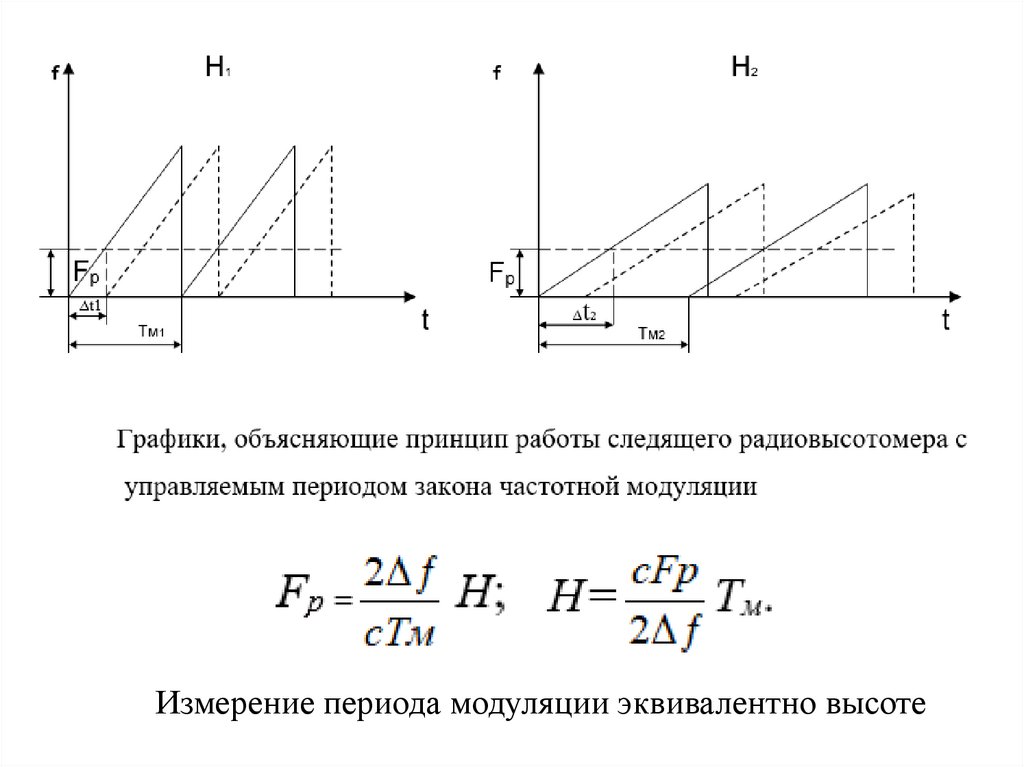
Измерение периода модуляции эквивалентно высоте21.
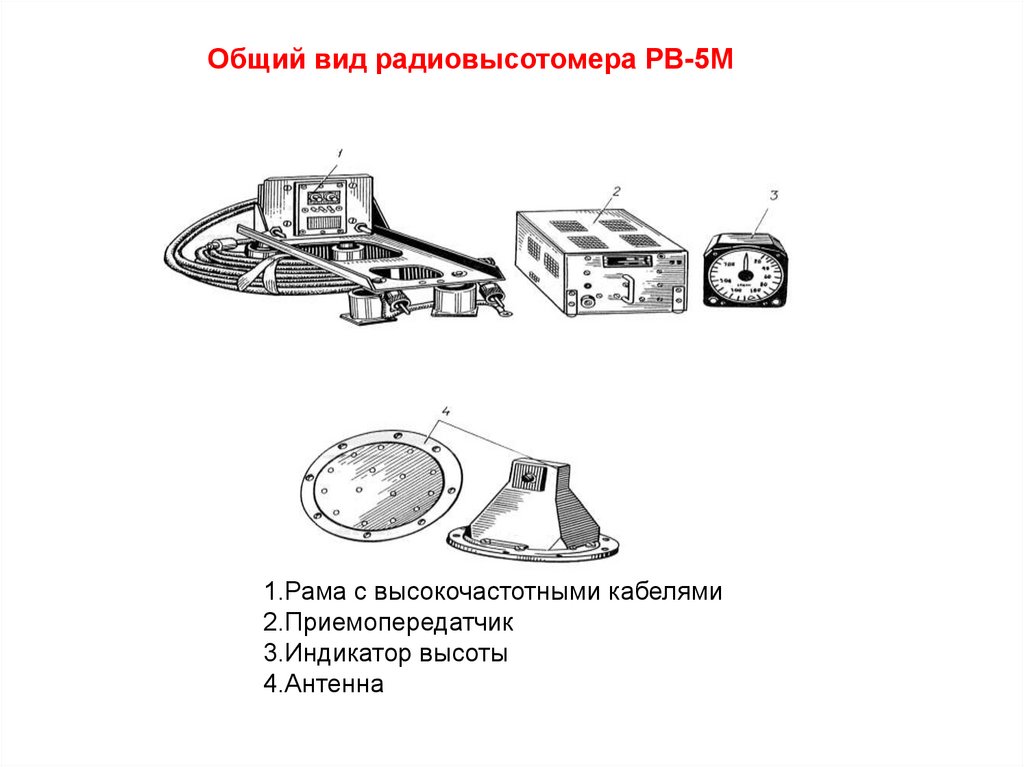
Общий вид радиовысотомера РВ-5М1.Рама с высокочастотными кабелями
2.Приемопередатчик
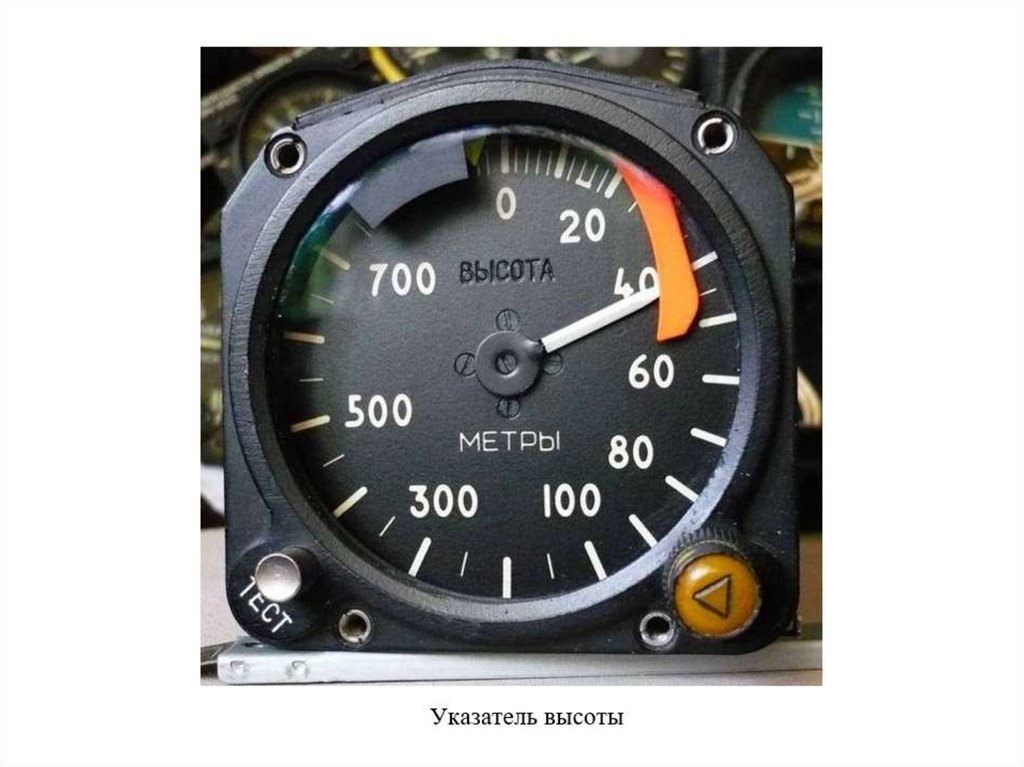
3.Индикатор высоты
4.Антенна
22.
23.
Комплект радиовысотомера РВ-851 — указатель высоты; 2 — приемопередатчик; 3 —
амортизационная рама;4 — антенна; 5 — ВЧ-кабель
24.
25.
26.
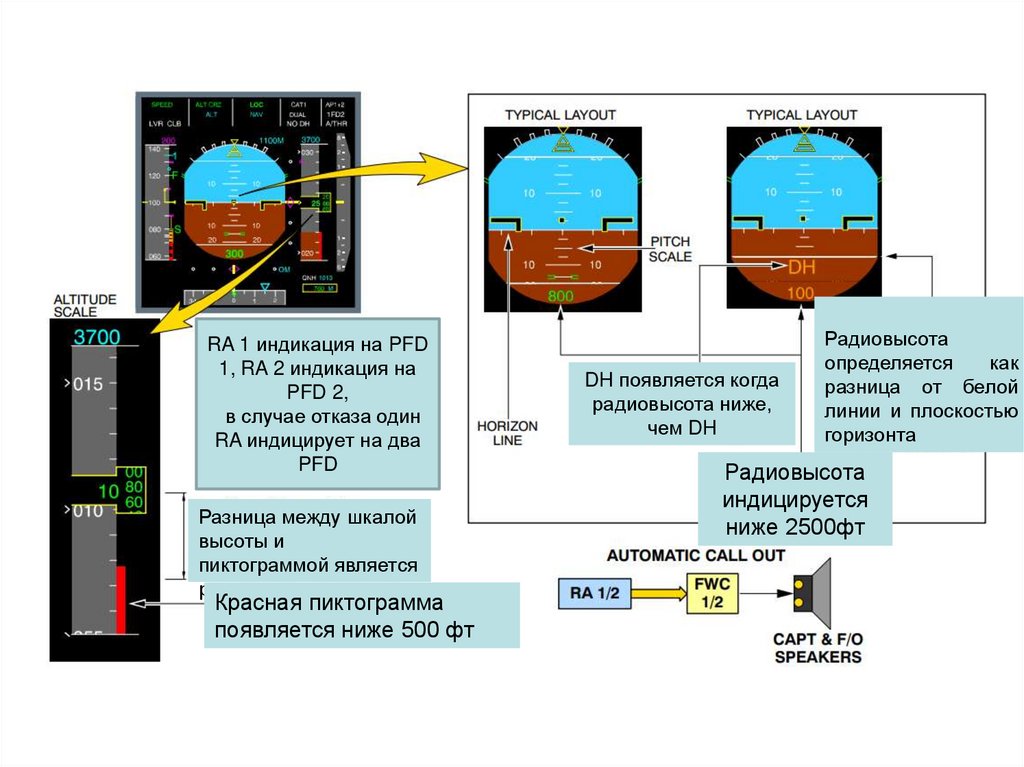
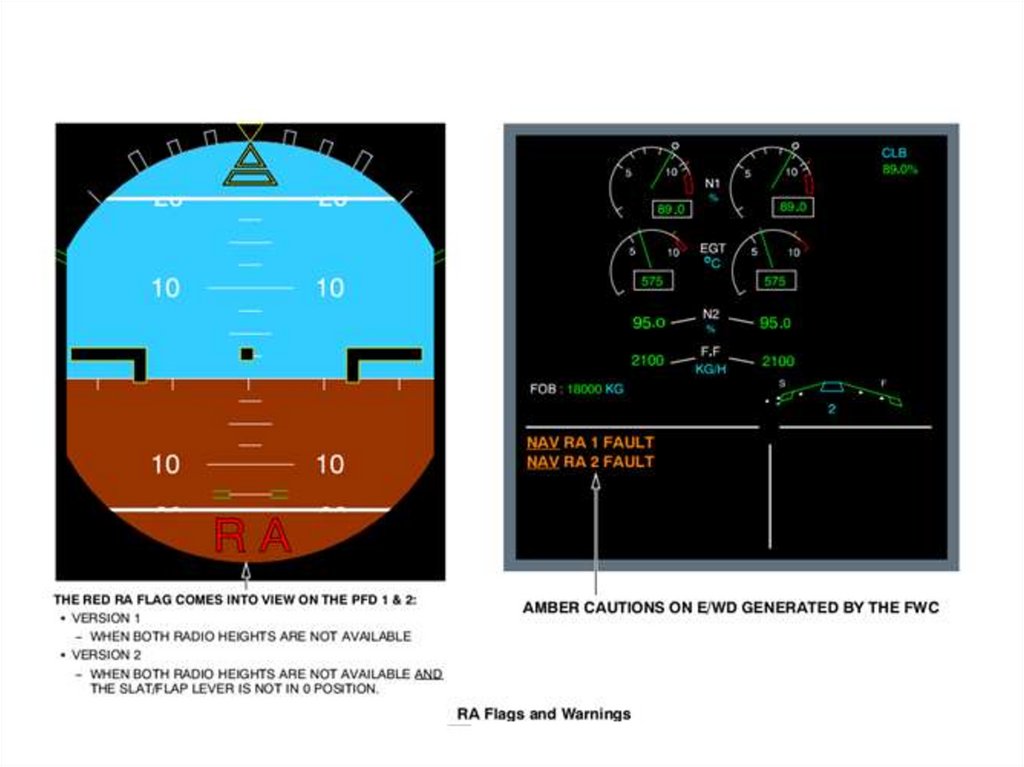
RA 1 индикация на PFD1, RA 2 индикация на
PFD 2,
в случае отказа один
RA индицирует на два
PFD
Разница между шкалой
высоты и
пиктограммой является
радиовысота
Красная пиктограмма
появляется ниже 500 фт
DH появляется когда
радиовысота ниже,
чем DH
Радиовысота
определяется
как
разница от белой
линии и плоскостью
горизонта
Радиовысота
индицируется
ниже 2500фт
27.
28.
29.
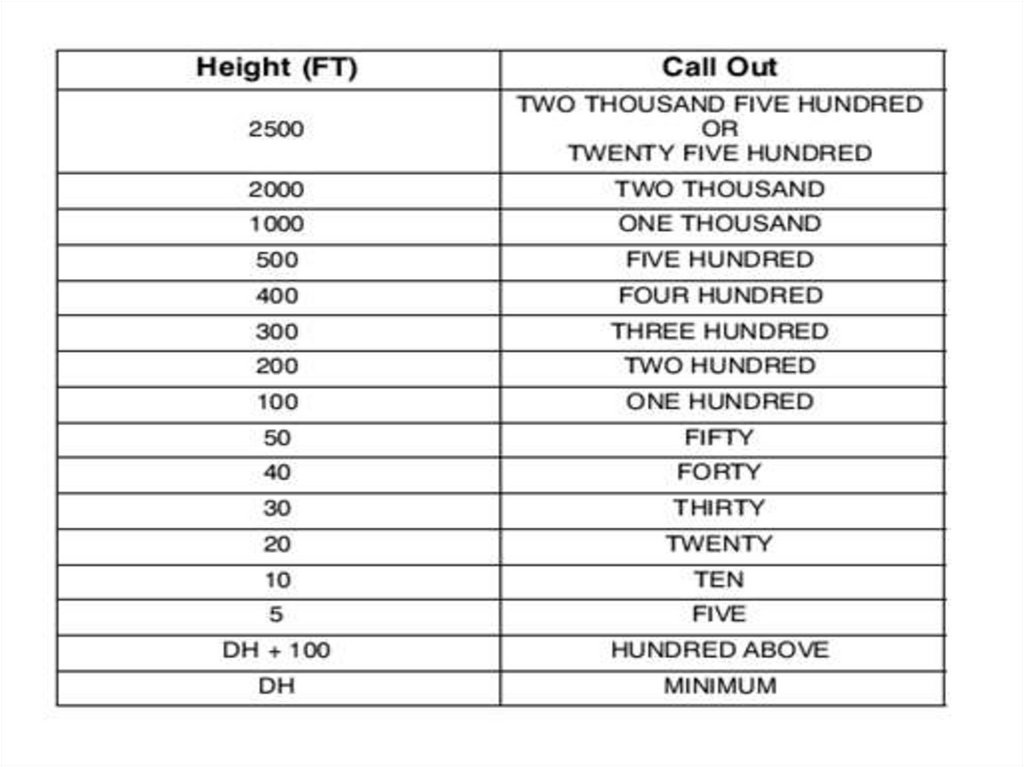
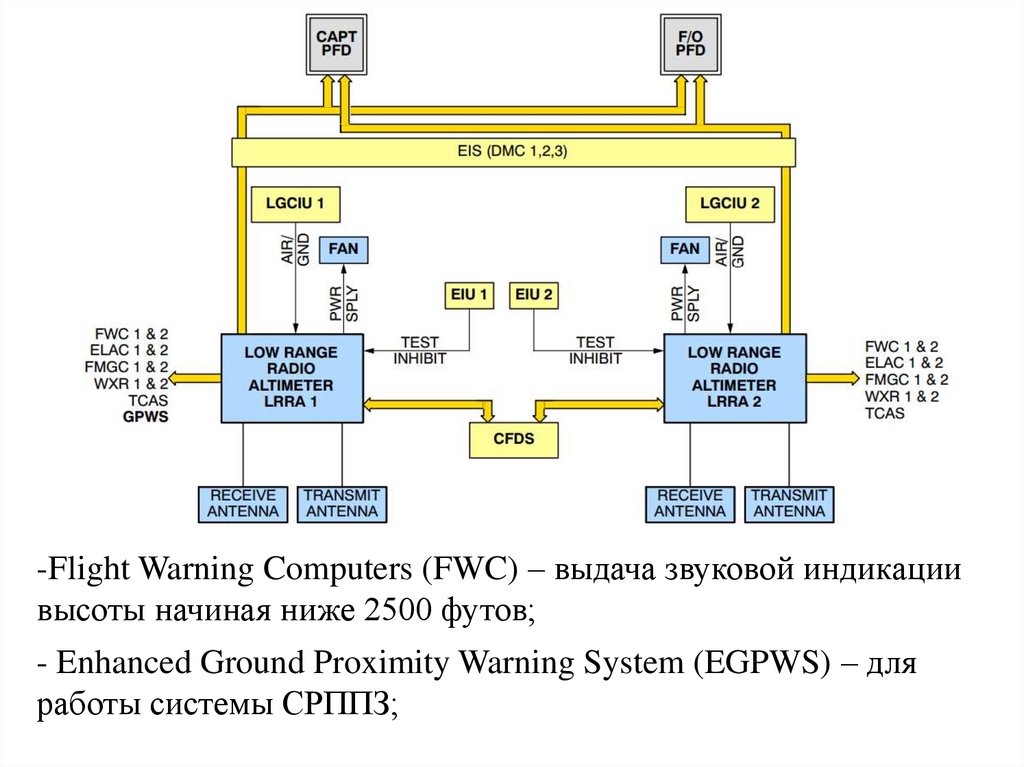
-Flight Warning Computers (FWC) – выдача звуковой индикациивысоты начиная ниже 2500 футов;
- Enhanced Ground Proximity Warning System (EGPWS) – для
работы системы СРППЗ;
30.
- ELevator Aileron Computers (ELACs) - Flight Management andGuidance Computers (FMGCs) – истинная высота необходима
для решения задач автоматического управления ВС;
- Engine Interface Unit (EIU) – посылает дискретные сигналы в
RA для запрета проведения теста на земле при работе двигателя
N2;
-Landing Gear Control and Interface Unit (LGCIU) – на земле
или в полете;
- Centralized Fault Display Interface Unit (CFDS) – для
проведения тестирования на земле.
31.
32.
33.
Импульсный радиовысотомер малых и средних высот РВ-21Импульсный РВ-21 (А-035) предназначен для измерения
истинной высоты полета и вертикальной скорости самолета
соответственно в диапазоне от 0 до 6000м и от 0 до 300м/с и
выдачи измеренной информации в ПНК и на указатели высоты.
РВ также выдает сигнал опасной высоты (звуковой и световой),
три РС и напряжения, пропорциональные измеренной высоте Uн1
и Uн2.
В состав радиовысотомера входят:
приемная и передающие антенны А-061-4;
приемопередатчик А-035-1 на амортизационной раме;
указатели высоты А-034-4 (0…1500 м, стрелочный), УВ-М1
(0…6000 м, цифровой);
высокочастотные соединительные кабели.
34.
Принцип действия импульсного высотомера35.
Импульсные РВ обладают рядом преимуществ. В частности,импульсный режим работы снимает проблемы развязки между
приемным и передающим трактами на большой высоте,
следовательно, нет принципиальных ограничений по
высотности РВ. Они хорошо сопрягаются с БЦВМ. Поэтому
ИРВ являются наиболее перспективными для использования их
на ВС.
Недостатком ИРВ можно считать низкую точность измерения
малой высоты по сравнению с РВ с ЧМ.