








 Механика
Механика Электроника
ЭлектроникаПохожие презентации:



. Блок ввода-вывода (SIOC)")


")



Тема 3. Датчики управления и позиционирования БПЛА. Занятие 1. Описание датчиков управления и позиционирования БПЛА
1. Старший преподаватель: майор Кутузов Андрей Станиславович
Цикл: Подготовки специалистов на комплексы с беспилотнымилетательными аппаратами средней дальности и
большой продолжительности полета.
Дисциплина: Конструкция и эксплуатация комплекса с БПЛА
средней дальности «Форпост».
Тема 3.
Датчики управления и
позиционирования БПЛА.
Занятие 1.
Описание датчиков управления и
позиционирования БПЛА.
Старший преподаватель: майор Кутузов Андрей Станиславович
2. Цели занятия
Перечислить датчики управления ипозиционирования БПЛА.
Описать назначение и принцип
работы модуля воздушных данных.
Назвать назначение и описать
принцип работы индукционного
магнитного компаса (FVU).
3.
Вопрос 1. Датчики управления ипозиционирования БПЛА.
Вопрос 2. Назначение, состав и принцип
работы блока датчиков воздушных
данных.
Вопрос 3. Назначение и принцип работы
индукционного магнитного
компаса.
4.
Вопрос 1.Датчики управления и
позиционирования.
5.
Датчики управления и позиционирования.Датчики – средства измерения,
предназначенные для выработки
сигнала измеряемого параметра в
форме удобной для передачи.
5
6.
Датчики управления и позиционирования.6
В состав БПЛА входят датчики системы
управления и позиционирования:
- ADU – модуль воздушных данных,
(измеряет барометрическую
высоту, приборную воздушную
скорость)
7.
Датчики управления и позиционирования.7
- FVU – индукционный магнитный
компас (измеряет магнитный
курс БПЛА)
- FLS – датчики уровня топлива
(измеряет количество топлива
в БПЛА)
8.
Датчики управления и позиционирования.8
- UDMU – блок динамических
измерений, (измеряет
продольные линейные
ускорения и угловые скорости
по тангажу, крену и
рысканью)
9.
Датчики управления и позиционирования.- DGPS – дифференциальная
глобальная система
позиционирования,
(определяет
местоположение БПЛА)
9
10.
Датчики управления и позиционирования.- ОАТ – датчик температуры
окружающей среды,
(измеряет температуру
воздуха вблизи БПЛА)
10
11.
Вопрос 2.Состав блока датчиков
воздушных данных.
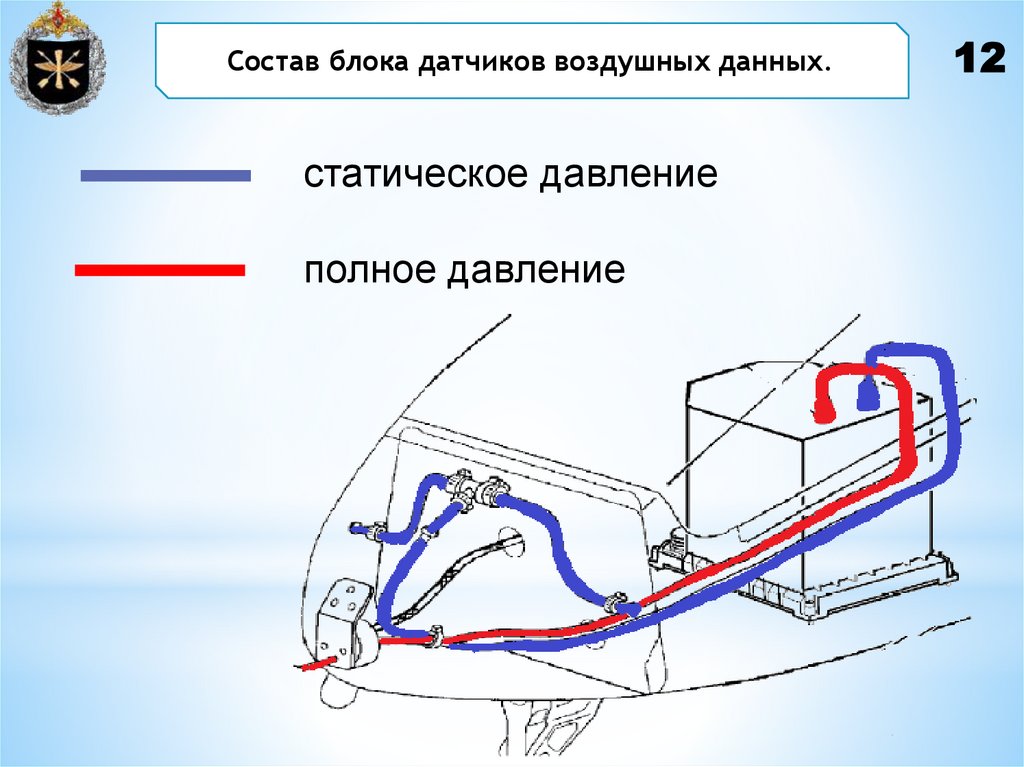
12.
Состав блока датчиков воздушных данных.статическое давление
полное давление
12
13.
Центральный модульный компьютерПриемник
статического
давления
Приемник
полного
давления
14.
Состав блока датчиков воздушных данных.14
Блок датчиков воздушных данных
(ADU) состоит
из трех блоков датчиков,
в каждый из которых входит:
датчик статического давления;
датчик динамического давления;
датчик температуры.
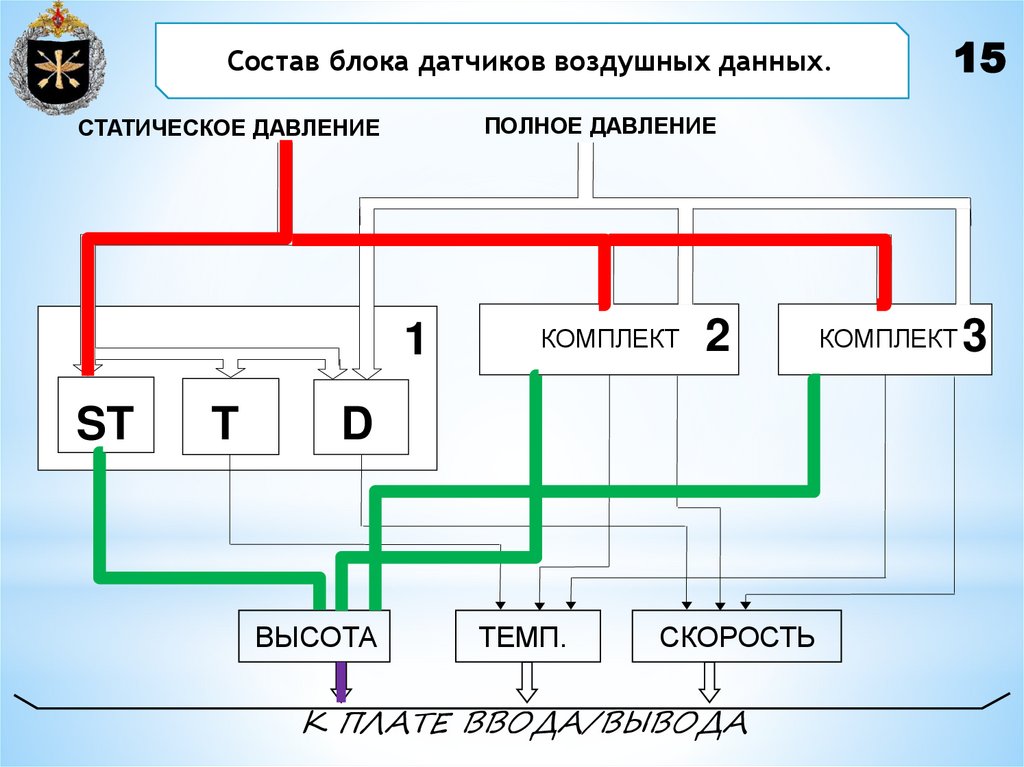
15.
Состав блока датчиков воздушных данных.ПОЛНОЕ ДАВЛЕНИЕ
СТАТИЧЕСКОЕ ДАВЛЕНИЕ
1
ST
T
КОМПЛЕКТ
2
D
ВЫСОТА
15
ТЕМП.
СКОРОСТЬ
К ПЛАТЕ ВВОДА/ВЫВОДА
КОМПЛЕКТ
3
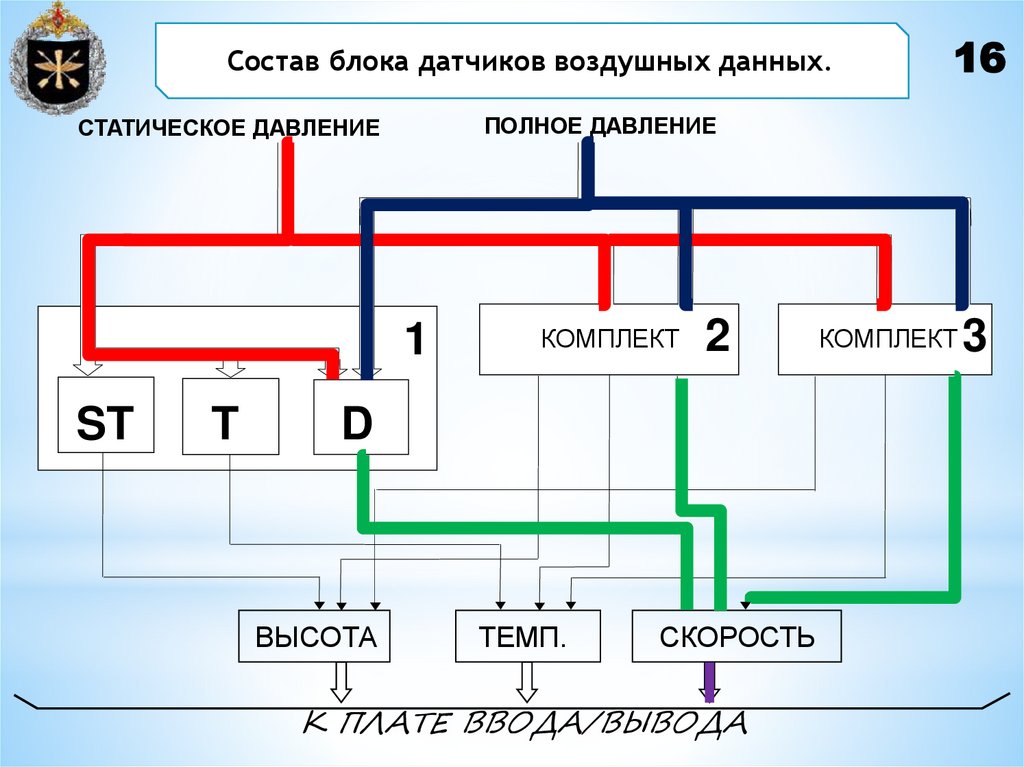
16.
Состав блока датчиков воздушных данных.ПОЛНОЕ ДАВЛЕНИЕ
СТАТИЧЕСКОЕ ДАВЛЕНИЕ
1
ST
T
КОМПЛЕКТ
2
D
ВЫСОТА
16
ТЕМП.
СКОРОСТЬ
К ПЛАТЕ ВВОДА/ВЫВОДА
КОМПЛЕКТ
3
17.
Состав блока датчиков воздушных данных.Выходной сигнал датчика
статического давления
обеспечивает измерение
высоты путем измерения
барометрического
давления.
17
18. Схема работы датчика высоты
Диафрагмавыгибается
Индикатор
высоты
показывает
снижение
Статическое
давление
возрастает
СТАТИЧЕСКОЕ
ДАВЛЕНИЕ
19.
Состав блока датчиков воздушных данных.Выходной сигнал датчика
динамического давления
обеспечивает измерение
индикаторной воздушной
скорости (IAS) посредством
измерения разности между
полным давлением и
статическим давлением.
19
20. Схема работы датчика скорости
Диафрагмавыгибается
Индикатор
скорости
показывает
ускорение
Полное
давление
возрастает
СТАТИЧЕСКОЕ
ДАВЛЕНИЕ
ПОЛНОЕ
ДАВЛЕНИЕ
21.
Состав блока датчиков воздушных данных.21
Данные температуры
используются для
корректировки параметра
высоты и измерения
индикаторной воздушной
скорости (IAS) в соответствии с
температурой воздуха.
22.
Состав блока датчиков воздушных данных.После преобразования данные
поступают на плату ЦПУ.
ЦПУ использует данные от трех
наборов для формирования:
отчета параметра высоты ALT;
отчета параметра индикаторной
воздушной скорости - IAS.
22
23.
Состав блока датчиков воздушных данных.23
Аналоговый
индикатор
воздушной
скорости.
Аналоговый
индикатор
барометрической
высоты
Цифровой
индикатор
воздушной
скорости.
Цифровой
индикатор
барометрической
высоты
24.
Вопрос 3.Назначение и принцип
работы индукционного
магнитного компаса FVU.
25.
Назначение и принцип работыиндукционного магнитного компаса FVU.
Индукционный магнитный
компас (FVU)
Выполняет измерение
курса БПЛА относительно
магнитного поля земли.
25
26.
Назначение и принцип работыиндукционного магнитного компаса FVU.
26
Индукционный магнитный
датчик (FVU) устанавливается в
центральной секции левой
консоли крыла и состоит из:
индукционного компаса;
вычислителя.
27.
Назначение и принцип работыиндукционного магнитного компаса FVU.
27
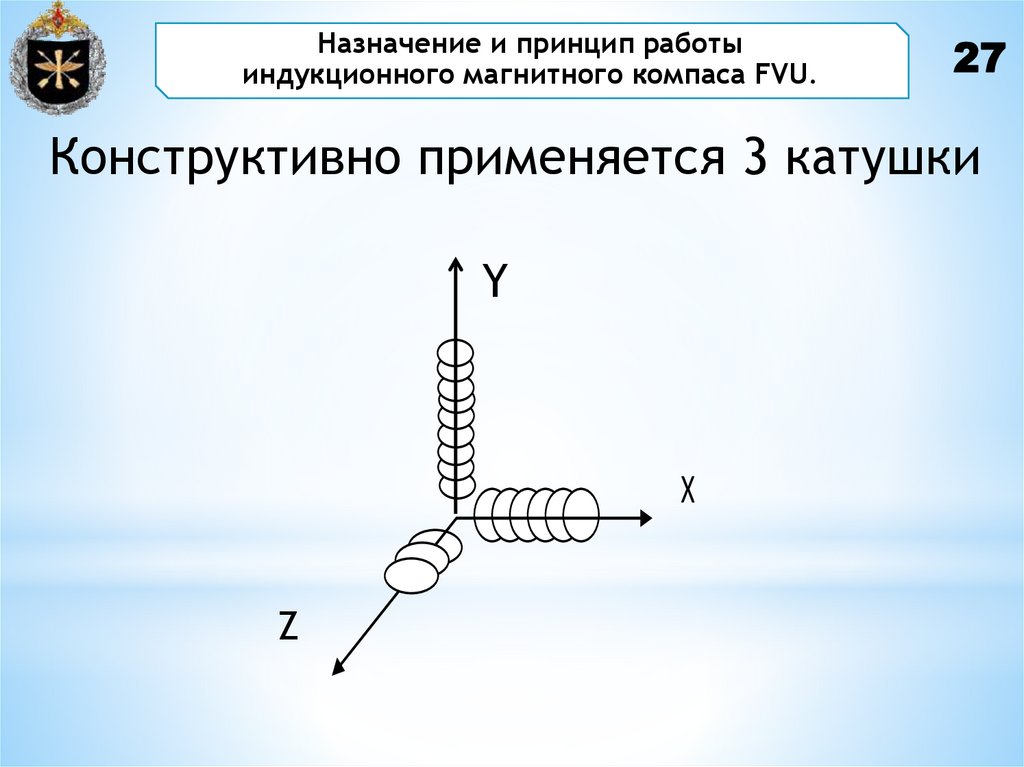
Конструктивно применяется 3 катушки
Y
Х
Z
28.
Назначение и принцип работыиндукционного магнитного компаса FVU.
28
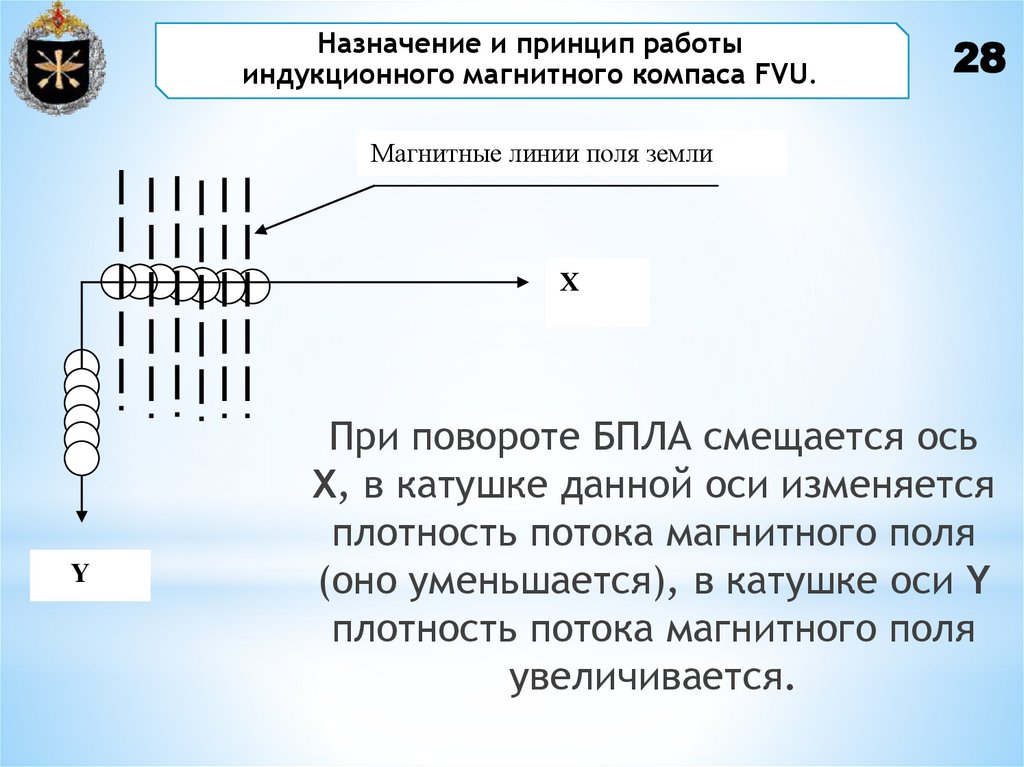
Магнитные линии поля земли
Х
Y
При повороте БПЛА смещается ось
Х, в катушке данной оси изменяется
плотность потока магнитного поля
(оно уменьшается), в катушке оси Y
плотность потока магнитного поля
увеличивается.
29.
Назначение и принцип работыиндукционного магнитного компаса FVU.
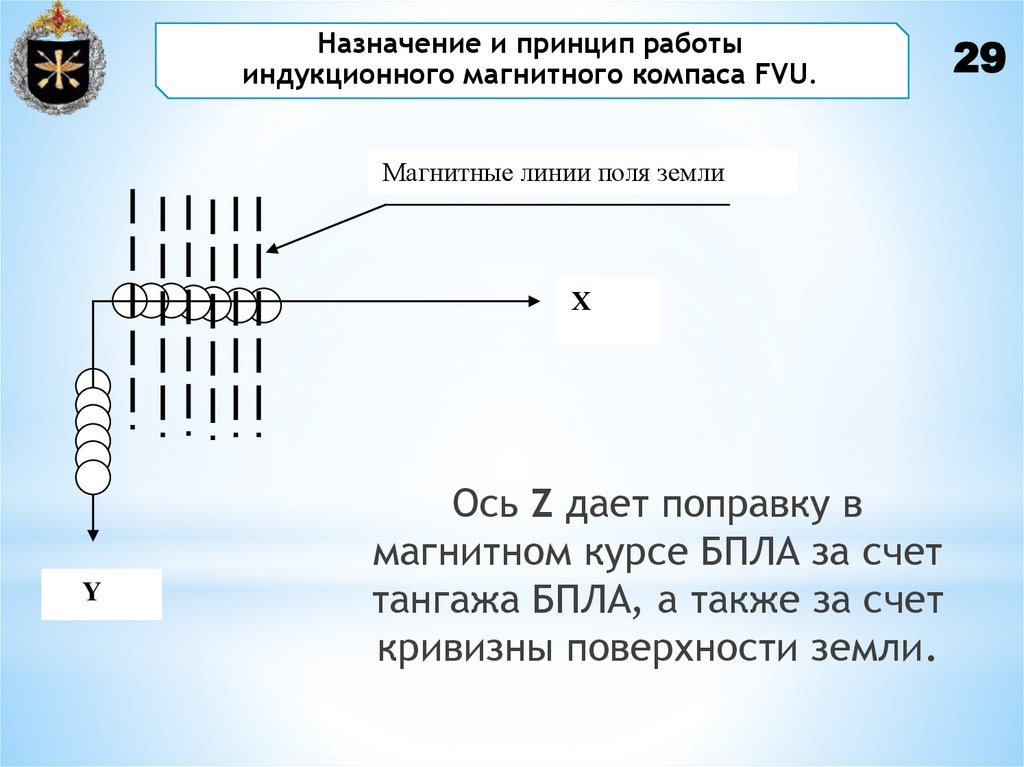
Магнитные линии поля земли
Х
Y
Ось Z дает поправку в
магнитном курсе БПЛА за счет
тангажа БПЛА, а также за счет
кривизны поверхности земли.
29
30.
Назначение и принцип работыиндукционного магнитного компаса FVU.
30
31.
Назначение и принцип работыиндукционного магнитного компаса FVU.
31
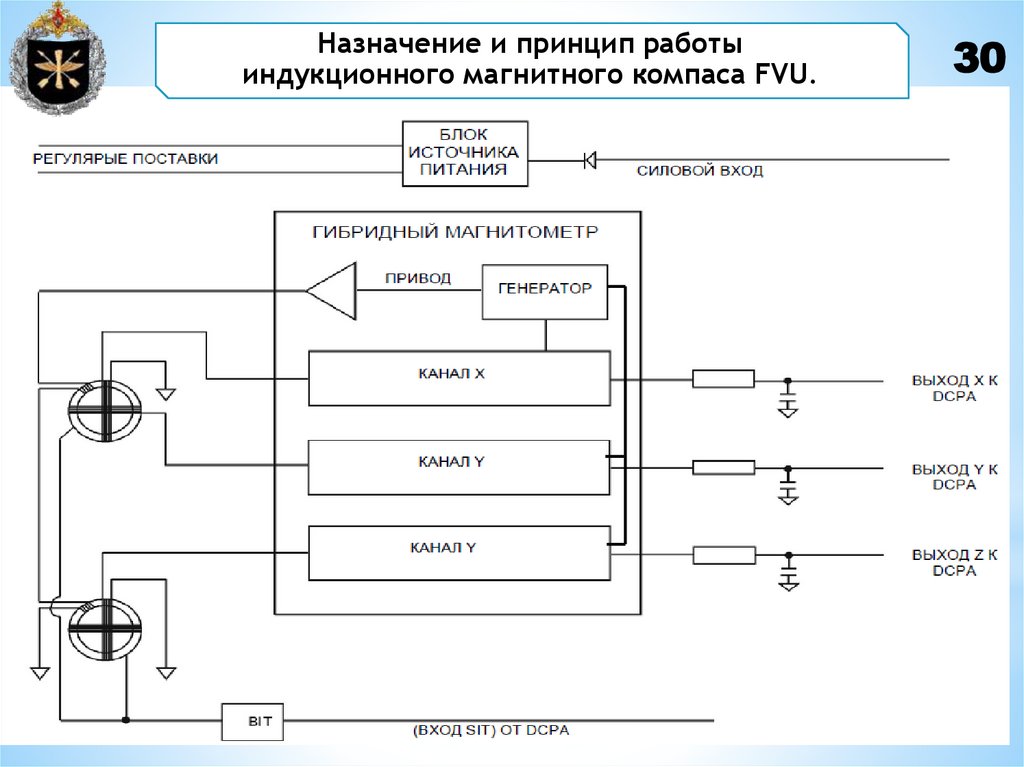
Сигналы индукционных зондов
обрабатываются тремя комплектами
электронного оборудования (X, Y, Z).
Генератор с усилителем мощности
возбуждает обмотку, модулируя
плотность потока, согласно внешнему
магнитному полю Земли.
32.
Назначение и принцип работыиндукционного магнитного компаса FVU.
Наводимый ток изменяется
с изменением угла между обмоткой и
магнитным полем Земли.
Результирующий сигнал распознается
демодулятором.
32
33.
Назначение и принцип работыиндукционного магнитного компаса FVU.
33
Система управления БПЛА сравнивает
курс, содержащийся в команде, с курсом,
сообщаемым индукционным датчиком,
для поддержания нулевой разности.
34.
Назначение и принцип работыиндукционного магнитного компаса FVU.
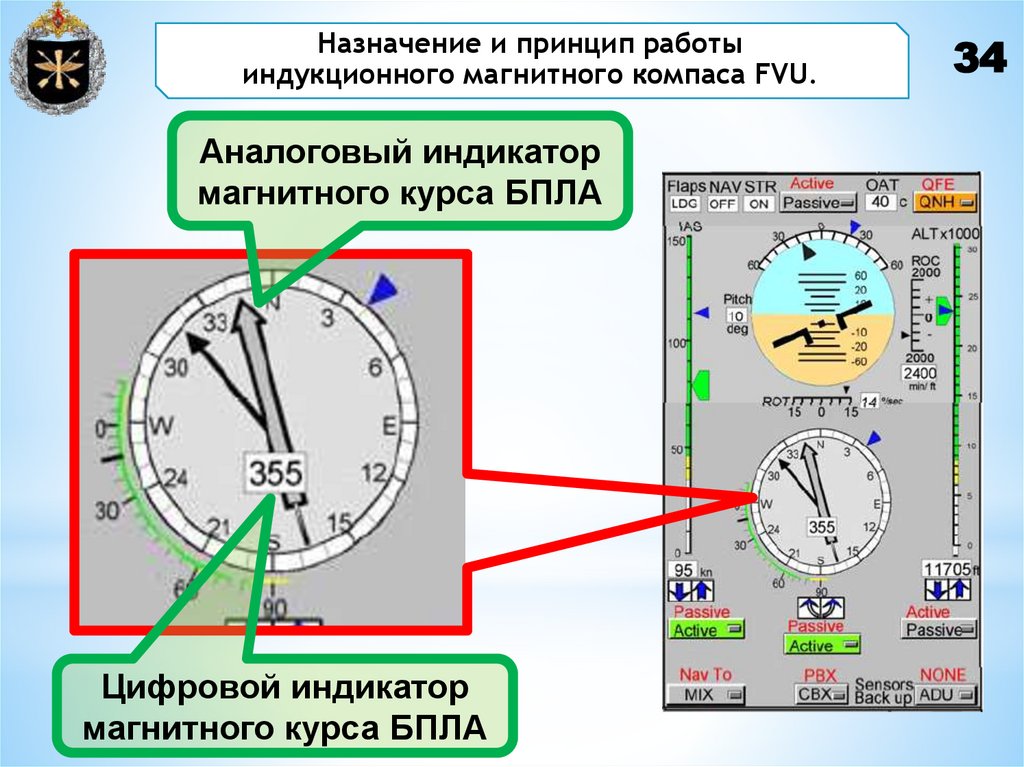
Аналоговый индикатор
магнитного курса БПЛА
Цифровой индикатор
магнитного курса БПЛА
34
35.
Назначение и принцип работыиндукционного магнитного компаса FVU.
35
Характеризуют
геомагнитное поле:
Магнитное склонение (Declination),
Магнитное наклонение (Inclination),
Величина суммарного магнитного поля
(Magn. fuild)
36.
Назначение и принцип работыиндукционного магнитного компаса FVU.
36
Магнитное склонение (Declination)
угол между географическим и магнитным
меридианами, который показывает отличие
между показаниями магнитного компаса и
истинным направлением на север.
37.
Назначение и принцип работыиндукционного магнитного компаса FVU.
37
Магнитное наклонение (Inclination)
угол, на который отклоняется стрелка под
действием магнитного поля Земли в
вертикальной плоскости.
38.
Назначение и принцип работыиндукционного магнитного компаса FVU.
38
Величина суммарного магнитного поля
(Напряжённость магнитного поля)—
векторная физическая величина, равная
разности вектора магнитной индукции и
вектора намагниченности.
39.
39ВНИМАНИЕ!
При замене FVU (или при его
погрешностях свыше допуска = ± 30)
необходимо провести калибровку датчика.
Технология его калибровки приведена в
руководстве по техническому
обслуживанию БПЛА TM_SR-RU-06-6.
40. КОНТРОЛЬНЫЕ ВОПРОСЫ:
1. Перечислите используемые датчикиуправления и позиционирования БПЛА.
2. Опишите назначение и состав модуля
воздушных данных.
3. Объясните принцип работы модуля
воздушных данных.
4. Назовите назначение и объясните
принцип работы индукционного
магнитного датчика.
41. Задание на самоподготовку:
1. Конспект лекций2. Руководство по описанию системы
TM_(RU)SR-00-1 глава 5
3. Доп. Руководство по летной
эксплуатации ТМ_(RU)SR-05-2 глава 2
стр. 9, 24-26