





 — популярная открытая аппаратно-программная платформа, предназначенная для проектирования и тестирования")





 Электроника
ЭлектроникаПохожие презентации:







")


Разработка модели транспортных весов на основе тензодатчика HX-711 и контроллера Ардуино
1. Уважаемая комиссия! Я, студент группы 21 АТП1-9 Шимченко Роман Дмитриевич, представляю выпускную квалификационную работу
«Разработка модели транспортных весов на основетензодатчика HX-711 и контроллера Ардуино»
2. Введение
Современные технологии активно внедряются в различные сферы деятельностичеловека, включая транспортную отрасль. Одним из важных аспектов
транспортной инфраструктуры является контроль массы перевозимых грузов,
обеспечивающий безопасность дорожного движения, защиту дорожных
покрытий от повреждений и предотвращение перегрузок транспортных средств.
Для эффективного решения данной задачи применяются специализированные
устройства — транспортные весы, позволяющие точно измерять массу
транспортного средства и груза непосредственно на месте взвешивания.
Важнейшей частью таких устройств являются датчики веса, преобразующие
механическое воздействие в электрический сигнал, который затем
обрабатывается электронными устройствами.
3.
Целью моего дипломного проекта является разработка моделитранспортных весов на основе популярного контроллера
тензодатчиков HX711 и открытой аппаратно-программной
платформы Arduino. Платформа Arduino позволяет быстро создавать
прототипы электронных устройств благодаря своей простоте
программирования и широкому спектру периферийных модулей,
среди которых одним из наиболее распространенных является
модуль HX711.
4.
Транспортные весы представляют собой важный элемент системы контроля массы автомобилей игрузовых транспортных средств. Современные подходы к проектированию транспортных весов
отличаются разнообразием применяемых технологий и конструкций, каждая из которых имеет свои
преимущества и недостатки.
Транспортные весы классифицируются по различным признакам, таким как
принцип действия, конструкция, область применения и уровень точности. Рассмотрим
подробнее каждый класс весовых устройств, используемых в современной практике
взвешивания транспортных средств.
1. По типу размещения нагрузки
1.1 Платформенные весы
1.2 Подкатные весы
1.3 Динамические весы
1.4 Платформенные весы
5.
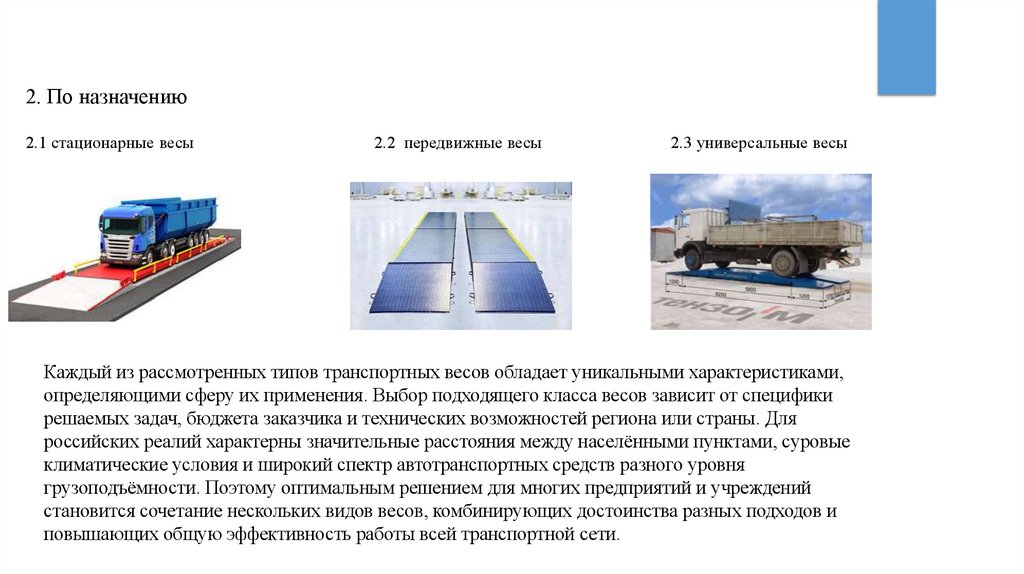
2. По назначению2.1 стационарные весы
2.2 передвижные весы
2.3 универсальные весы
Каждый из рассмотренных типов транспортных весов обладает уникальными характеристиками,
определяющими сферу их применения. Выбор подходящего класса весов зависит от специфики
решаемых задач, бюджета заказчика и технических возможностей региона или страны. Для
российских реалий характерны значительные расстояния между населёнными пунктами, суровые
климатические условия и широкий спектр автотранспортных средств разного уровня
грузоподъёмности. Поэтому оптимальным решением для многих предприятий и учреждений
становится сочетание нескольких видов весов, комбинирующих достоинства разных подходов и
повышающих общую эффективность работы всей транспортной сети.
6. Создание эффективной и надежной системы измерения массы транспортных средств требует понимания принципов работы ключевых
компонентов предлагаемого решения. Модельтранспортных весов включает три основных компонента: тензометрический датчик (тензодатчик),
контроллер HX711 и платформу Arduino.
Тензометрический датчик (тензодатчик) — это основной компонент системы, предназначенный для
преобразования механической нагрузки (силы тяжести) в электрический сигнал. Конструктивно он состоит
из металлического корпуса с наклеенным внутри специальным элементом — тензорезистором,
выполненным из тонкой металлической пленки или фольги.
Спецификация тензодатчиков мостовых
При воздействии нагрузки металлический корпус деформируется, вызывая деформацию
тензорезистора, что приводит к изменению его электрического сопротивления. Изменение
сопротивления передается в электрическую цепь, формируя выходной сигнал напряжения,
пропорциональный величине прикладываемого усилия.
Максимальный вес: 1/5/10/20 кг;
Отверстия под винты: M4/M5 (подходит под винт с потайной
головкой);
Преимуществом тензодатчиков является высокая чувствительность, линейность
характеристик и устойчивость к вибрациям и температурным изменениям. Наиболее
распространенные типы тензодатчиков:
Размеры: 14мм х 14мм х 80.5мм;
S-образные: Идеальны для тяжелых нагрузок, такие как автомобильные весы и
крановые балки.
Кольцевые: Надежны и долговечны, широко используются в динамических системах.
Балочные: Просты в монтаже и обслуживании, подходят для легких и средних
нагрузок.
Основное назначение тензорезистивных датчиков - они предназначены для создания на
их основе весов, датчиков давления или концевых датчиков.
Рисунок 12. Общий вид и габариты мостового тензодатчика.
Спецификация тензодатчика полумостового
Максимальный вес: 50 кг;
• Размеры: 34мм х 34мм х 9мм;
7. 2 версии данных датчиков
В которых резисторы объединены в мост, подключённыйнепосредственно к АЦП, который фиксирует изменения значений
резисторов. Датчики выполнены из алюминия, имеют форму
бруска с 4 отверстиями на одной плоскости и особым сдвоенным
отверстием на другой. При установке датчике в рабочее
положение необходимо жёстко закрепить одну его сторону, а на
вторую установить (при необходимости) платформу для
завешивания грузов. Имеют на выходе из датчика 4 провода.
Рисунок. 13 Схема устройства и подключения мостового датчика к
микросхеме HX711
В которых резисторы объединены в полумост,
подключаются между собой, чтобы образовать полный
мост и, затем, подключаются к АЦП, который фиксирует
изменения значений резисторов. Имеют на выходе из
датчика 3 провода. Схема их устройства и подключения
следующая:
Схема устройства и подключения полу-мостового
датчика к микросхеме HX711:
Рисунок 14. Схема подключения для 1 тензодатчика.
8.
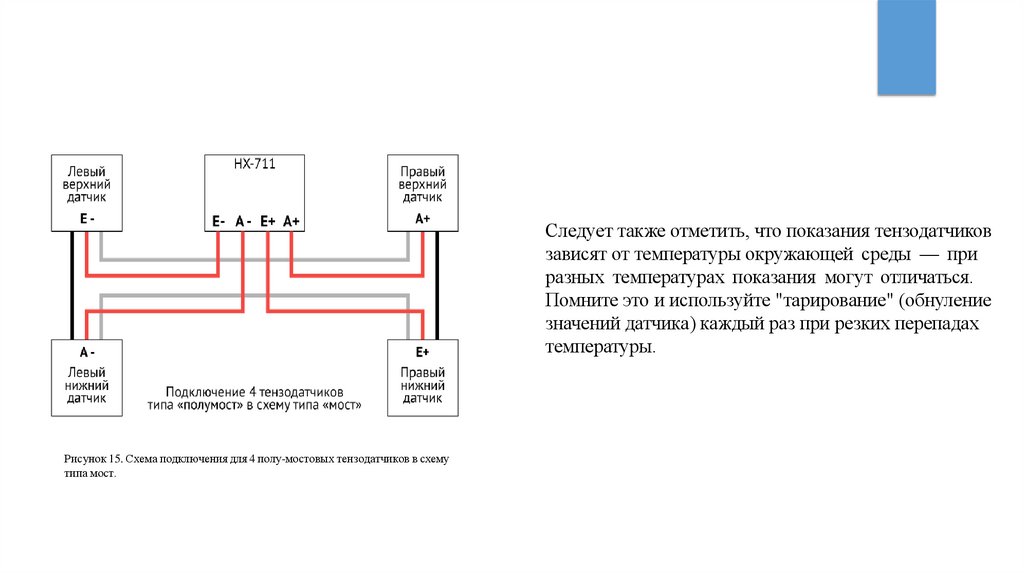
Следует также отметить, что показания тензодатчиковзависят от температуры окружающей среды — при
разных температурах показания могут отличаться.
Помните это и используйте "тарирование" (обнуление
значений датчика) каждый раз при резких перепадах
температуры.
Рисунок 15. Схема подключения для 4 полу-мостовых тензодатчиков в схему
типа мост.
9. HX711 модуль АЦП 24-битный 2-канальный
Контроллер HX711 предназначен для приема сигнала оттензодатчика и дальнейшей его обработки. Основная
задача контроллера — усилить слабый аналоговый
сигнал, полученный от тензометра, и перевести его в
цифровую форму для последующей обработки
центральным устройством.
HX711 работает следующим образом:
Усиление сигнала;
Фильтрация шума;
Аналогово-цифровое преобразование (АЦП);
Передача данных.
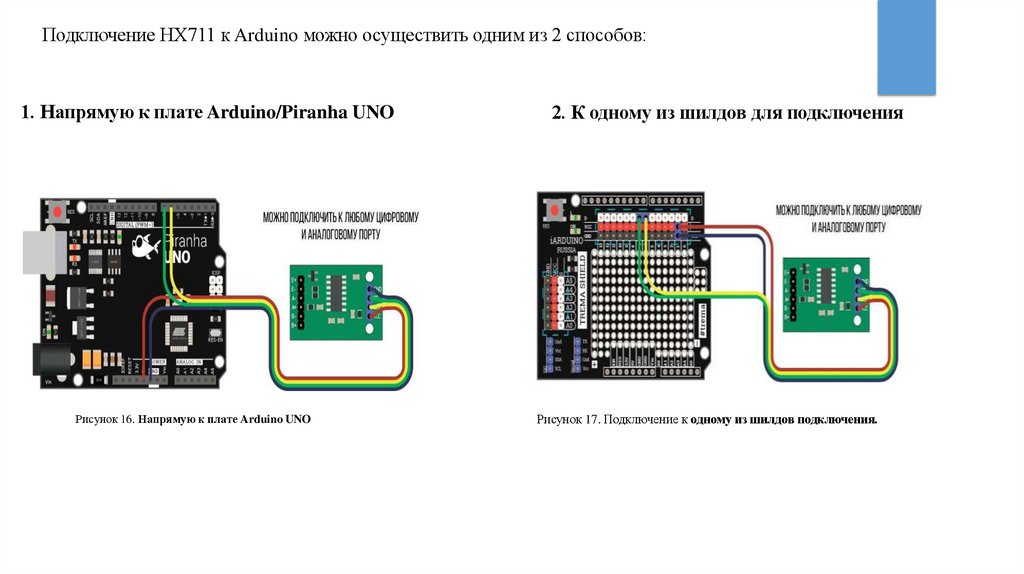
Подключение HX711 к Arduino можно
осуществить одним из 2 способов:
1. Напрямую к плате Arduino/Piranha UNO
Контроллер HX711 поддерживает дифференциальный
вход, что повышает отношение сигнал-шум и улучшает
точность измерений. Его энергопотребление невелико, что
делает возможным использование маломощных
источников питания
Рисунок 16. Напрямую к плате Arduino UNO
10.
Подключение HX711 к Arduino можно осуществить одним из 2 способов:1. Напрямую к плате Arduino/Piranha UNO
Рисунок 16. Напрямую к плате Arduino UNO
2. К одному из шилдов для подключения
Рисунок 17. Подключение к одному из шилдов подключения.
11. Ардуино (Arduino) — популярная открытая аппаратно-программная платформа, предназначенная для проектирования и тестирования
электронныхсхем. Она основана на однокристальном микроконтроллере Atmel AVR или
SAMD, оснащенном набором периферийных интерфейсов ввода-вывода.
Роль Arduino в моей модели следующая:
Рисунок 18. Arduino Uno
Получение данных;
Обработка данных;
Управление системой;
Связь с оператором.
Программируемая логика Arduino позволяет
гибко настраивать поведение системы,
добавлять дополнительные модули (датчики
температуры, влажности, освещённости) и
интегрироваться с облачными сервисами и
системами SCADA.
12. Выбор измерительной схемы
При создании модели транспортных весов на основе контроллера тензодатчика HX711 иплатформы Arduino одной из ключевых задач является подбор оптимального варианта
измерительной схемы. Рассматриваемая нами схема с двумя мостовыми тензометрическими
датчиками и двумя модулями HX711 отличается высокой точностью и надежностью, что
делает её идеальным решением для нашего проекта.
Основы работы мостовой схемы:
Мостовая схема (называемая также мостом Уинстона-Уитстона) представляет собой
конфигурацию четырех резисторов, один из которых заменён тензометрическим датчиком. В
результате нагрузка, действующая на датчик, вызывает изменение его сопротивления, что
приводит к дисбалансу моста и возникновению выходного напряжения.
Именно эта особенность мостовой схемы делает её подходящей для высокочувствительных
измерений, поскольку минимальное изменение сопротивления тензодатчика
преобразуется в заметное изменение напряжения на выходе.
13. Техническая часть. Выбор электронных компонентов и его обоснование
Микроконтроллер Arduino Uno Rev3Контроллер тензодатчика HX711
Критерии выбора:
Критерии выбора:
Поддержка популярных сред программирования (например,
Arduino IDE);
Совместимость с выбранным микроконтроллером;
Доступность готовых библиотек и примеров кода;
Диапазон измеряемых величин
Количество выводов GPIO (General Purpose Input Output);
Энергопотребление и производительность.
(чувствительность);
Потребляемая мощность;
Интерфейсы связи (SPI, PC и др.).
Индикаторы:
Для визуализации данных о массе
выбран LCD Дисплей 1602.
Тензометрический датчик
Критерии выбора:
Номинальная нагрузка
(грузоподъемность);
Материал корпуса и защиты
(устойчивость к коррозии и
влаге);
Рабочий диапазон температур.
14.
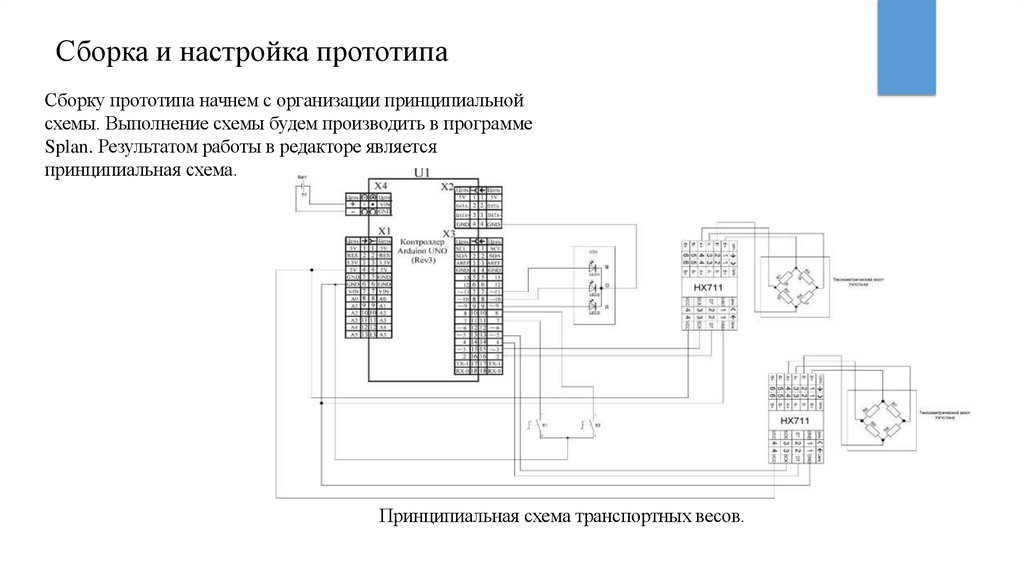
Сборка и настройка прототипаСборку прототипа начнем с организации принципиальной
схемы. Выполнение схемы будем производить в программе
Splan. Результатом работы в редакторе является
принципиальная схема.
Принципиальная схема транспортных весов.
15.
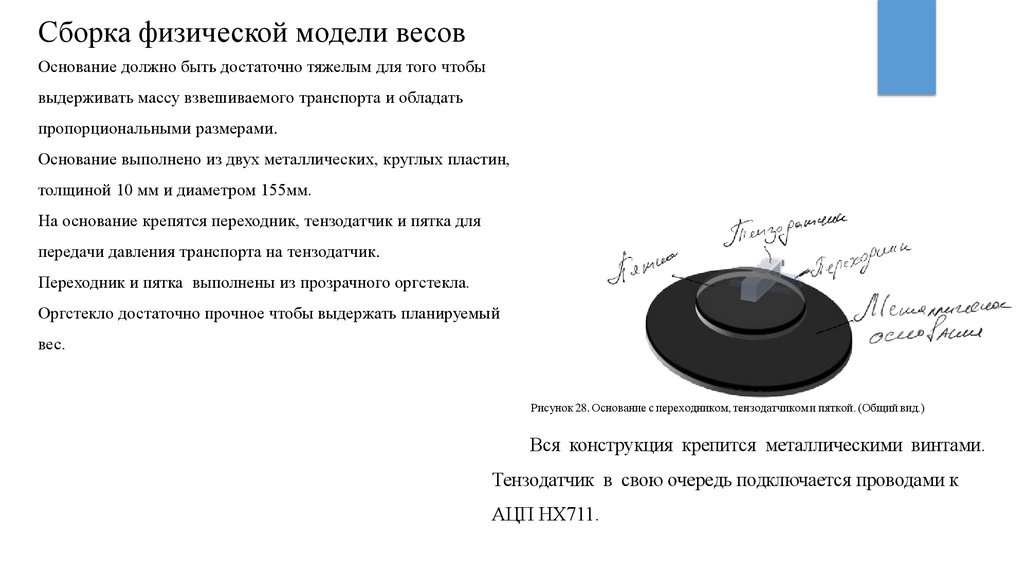
Сборка физической модели весовОснование должно быть достаточно тяжелым для того чтобы
выдерживать массу взвешиваемого транспорта и обладать
пропорциональными размерами.
Основание выполнено из двух металлических, круглых пластин,
толщиной 10 мм и диаметром 155мм.
На основание крепятся переходник, тензодатчик и пятка для
передачи давления транспорта на тензодатчик.
Переходник и пятка выполнены из прозрачного оргстекла.
Оргстекло достаточно прочное чтобы выдержать планируемый
вес.
Рисунок 28. Основание с переходником, тензодатчиком и пяткой. (Общий вид.)
Вся конструкция крепится металлическими винтами.
Тензодатчик в свою очередь подключается проводами к
АЦП HX711.
16. Основные компоненты транспортных весов:
ТЕНЗОМЕТРИЧЕСКИЙ ДАТЧИК(ТЕНЗОДАТЧИК) — ПРЕОБРАЗУЕТ СИЛУ
ТЯЖЕСТИ ГРУЗА В ЭЛЕКТРИЧЕСКИЙ
СИГНАЛ.
КОНТРОЛЛЕР ТЕНЗОДАТЧИКА (HX711) —
УСИЛИВАЕТ И ПРЕОБРАЗУЕТ СИГНАЛ
ДАТЧИКА В ЦИФРОВОЙ ФОРМАТ.
МИКРОКОНТРОЛЛЕР (ARDUINO) —
УПРАВЛЯЕТ РАБОТОЙ СИСТЕМЫ,
ОБРАБАТЫВАЕТ ДАННЫЕ И ВЫВОДИТ
РЕЗУЛЬТАТ.
СИСТЕМА ИНДИКАЦИИ (LCD-ЭКРАН, RGB
СВЕТОДИОД) — ПОКАЗЫВАЕТ ВЕС И
СТАТУС СИСТЕМЫ.
ИСТОЧНИК ПИТАНИЯ (БЛОК ПИТАНИЯ,
БАТАРЕЯ) — ОБЕСПЕЧИВАЕТ
ЭЛЕКТРОЭНЕРГИЕЙ ВСЮ СИСТЕМУ.
КОРПУС И КРЕПЕЖНЫЕ ЭЛЕМЕНТЫ —
ЗАЩИЩАЮТ ВНУТРЕННИЕ КОМПОНЕНТЫ
И ОБЕСПЕЧИВАЮТ ПРАВИЛЬНОЕ
КРЕПЛЕНИЕ ДАТЧИКОВ.
17.
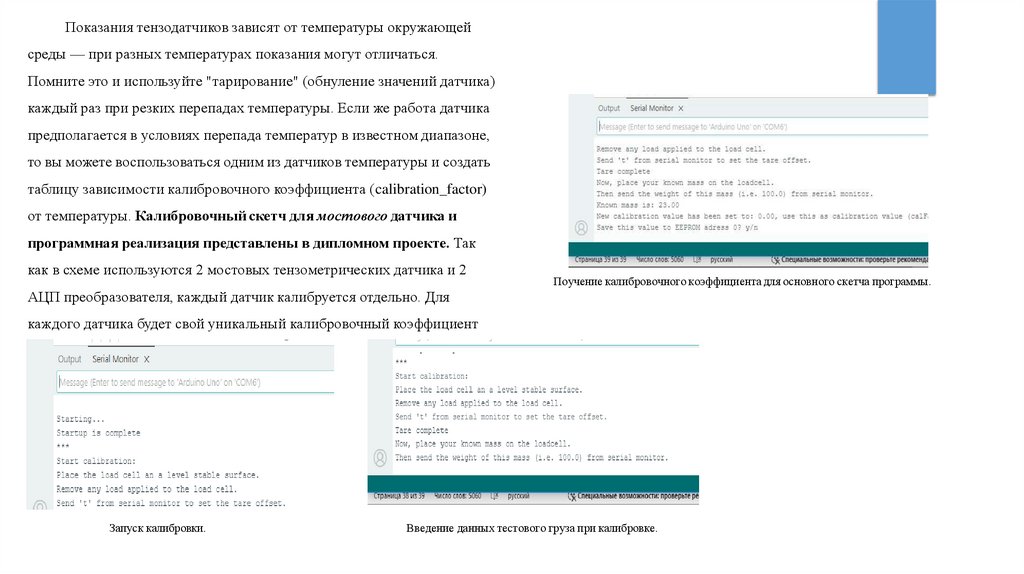
Показания тензодатчиков зависят от температуры окружающейсреды — при разных температурах показания могут отличаться.
Помните это и используйте "тарирование" (обнуление значений датчика)
каждый раз при резких перепадах температуры. Если же работа датчика
предполагается в условиях перепада температур в известном диапазоне,
то вы можете воспользоваться одним из датчиков температуры и создать
таблицу зависимости калибровочного коэффициента (calibration_factor)
от температуры. Калибровочный скетч для мостового датчика и
программная реализация представлены в дипломном проекте. Так
как в схеме используются 2 мостовых тензометрических датчика и 2
Поучение калибровочного коэффициента для основного скетча программы.
АЦП преобразователя, каждый датчик калибруется отдельно. Для
каждого датчика будет свой уникальный калибровочный коэффициент
Запуск калибровки.
Введение данных тестового груза при калибровке.
18. Заключение
Дипломный проект направлен на изучение и внедрение эффективных методик контролямассы транспортных средств с использованием открытых аппаратно- программных
платформ. Полученные результаты подтверждают высокую практическую значимость
разработанного устройства и открывают перспективы для его дальнейшего
совершенствования и коммерциализации.
Представленное решение полностью соответствует поставленным целям и задачам и
доказало свою работоспособность в лабораторных условиях. Дальнейшая модернизация
устройства возможна путём интеграции дополнительных компонентов и улучшенных
алгоритмов обработки данных, что сделает его ещё более привлекательным для
потенциальных заказчиков.
Исследование завершилось разработкой готового рабочего прототипа, готового к
дальнейшему промышленному внедрению и испытанию в реальных условиях
эксплуатации.