



























































 Промышленность
ПромышленностьПохожие презентации:










Основные характеристики самолёта и их определение в лётных испытаниях
1. Основные характеристики самолета и их определение в лётных испытаниях
2. Системы координат
Земная нормальная OgXgYgZg –– начало координат Og расположено
на поверхности Земли, где удобно
для решения задачи,
– ось OgXg лежит в местной
горизонт. плоскости, направлена
так, как удобно для решения задачи,
– ось OgYg направлена вверх по
местной вертикали,
– ось OgZg лежит в местной
горизонт.
плоскости, перпендикулярна оси
Og X g
Связанная OXYZ –
– начало координат Oз расположено
на самолёте, обычно в ЦМ,
– продольная ось OX лежит на
пересечении плоскости СГФ и
вертикальной плоскости симметрии
самолёта,
– нормальная ось OY лежит в
плоскости симметрии, направлена
вверх и перпендикулярна оси OX,
– поперечная ось OZ лежит в
плоскости СГФ, перпендикулярна
оси OX
2
3. Системы координат
Угол тангажа – угол междупродольной осью OX и
горизонтальной плоскостью OgXgZg.
-90 < < +90
Угол крена – угол между поперечной
осью OZ и осью OgZg, смещённой в
положение, соответствующее нулевому
углу рыскания.
-180 < < +180
Угол рыскания – угол между осью
ОgXg и проекцией продольной оси ОХ
на горизонтальную плоскость ОgXgZg.
-180 < < +180
Угол курса – угол между осью ОgXg
и проекцией продольной оси ОХ на
горизонтальную плоскость ОgXgZg.
0 < < +360
Угол наклона траектории – угол между направлением земной скорости VК
и горизонтальной плоскостью OgXgZg. -90 < < +90
Земная скорость VК – скорость начала связанной системы координат
относительно какой-либо земной системы координат.
3
4. Системы координат
Скоростная OaXaYaZa–
– начало координат Oa
расположено на
самолёте, обычно в
ЦМ,
– скоростная ось OaXa
параллельна вектору
воздушной скорости
самолёта,
– ось подъёмной силы
OaYa лежит в
плоскости симметрии,
направлена вверх и
перпендикулярна оси
OaXa,
– боковая ось OaZa
направлена в правое
крыло,
перпендикулярна осям
OaXa и OaYa
4
5. Системы координат
Угол атаки – уголмежду продольной
осью и проекцией
вектора воздушной
скорости ЛА на
плоскость его
симметрии.
Угол скольжения –
угол между вектором
воздушной скорости
ЛА и плоскостью его
симметрии.
Пространственный
угол атаки П – угол
между вектором
воздушной скорости
ЛА и осью ОХ.
5
6. Аэродинамика самолёта.
Обтекание профиля крыла6
7. Аэродинамика самолёта.
Обтекание профиля крылаЦентр давления – точка приложения равнодействующей
аэродинамических сил (давления).
p
гладкое крыло
крыло с механизацией
7
8. Аэродинамика самолёта.
Обтекание профиля и крылаАэродинамический фокус
Фокус профиля, крыла или самолёта по углу атаки – точка приложения
приращения аэродинамической силы при малом изменении только угла атаки.
Или точка, относительно которой продольный момент не изменяется при
малом изменении только угла атаки.
8
9. Аэродинамика самолёта.
Обтекание профиля крылаВспомогательная система координат
для определения положения ЦМ (ХТ), ЦД (ХD) и фокуса (ХF)
XT
XT
;
bA
XF
XF
.
bA
XD
XD
.
bA
10. Аэродинамика самолёта.
Сила сопротивления крылаcx ( , M ) cx0 cxi
Вредное сопротивление – часть полного сопротивления самолёта,
не связанное с созданием подъёмной силы.
c x0 c xp c xf c xв
Индуктивное сопротивление – часть полного сопротивления самолёта,
связанная с созданием подъёмной силы.
c2yа
c xi
(1 δ)
π λ
10
11. Аэродинамика самолёта.
Аэродинамические силы профиля и крылаСистемы координат
x, y – связанная система координат, xa, ya – скоростная система координат,
V – вектор скорости потока, – угол атаки, Ra – аэродинамическая сила.
11
12. Аэродинамика самолёта.
Аэродинамические силы профиля и крылаСвязанная система координат:
У = Сy q S – нормальная
(подъёмная) сила
Х = Сx q S – продольная
аэродинамическая сила,
где:
Сy = Cy( ) – коэффициент
нормальной силы,
Сx = Cx( ) – коэффициент
продольной силы,
S – площадь крыла,
q – скоростной напор.
12
13. Аэродинамика самолёта.
Аэродинамические силы профиля и крылаСкоростная система координат:
Уа = Сy q S – аэродинамическая
подъёмная сила
Ха = Сx q S –сила лобового
сопротивления,
где:
Сyа = Cyа( ) – коэффициент
подъемной силы,
Сxа = Cxа( ) – коэффициент
лобового сопротивления,
S – площадь крыла,
q – скоростной напор.
13
14. Аэродинамика самолёта.
Аэродинамический момент самолётаРасчёт продольного момента через ЦД и через фокус на линейном участке.
M Z (α ) X T - X d (α ) Y (α )
M Z (α ) M Z0 X T - X f Y α.
при ω z 0 и δ в const
mZ (α) mZ0 XT - Xf cαy α.
15. Аэродинамика самолёта.
Аэродинамические силы и моменты самолётаМатематическое описание коэффициентов суммарных аэродинамических сил
самолёта в линейной постановке:
c x ( ) c xp c xf c xв A c2y ( )
c y ( ) cαy (α - α 0 )
c z ( ) c z
Математическое описание коэффициентов суммарных аэродинамических моментов
самолёта в линейной постановке:
m Z m Z0 mαz α m zωz ωz m zα α m z cт m δz δ в
ω
m x mβx β m xωx ωx m x y ωy mδxэ δ э mδxн δ н
ω
m y mβy β m ωy x ωx m y y ωy m δyэ δ э m δyн δ н
15
16. Силы и моменты, действующие на ЛА
Влияние сжимаемости. Профили.16
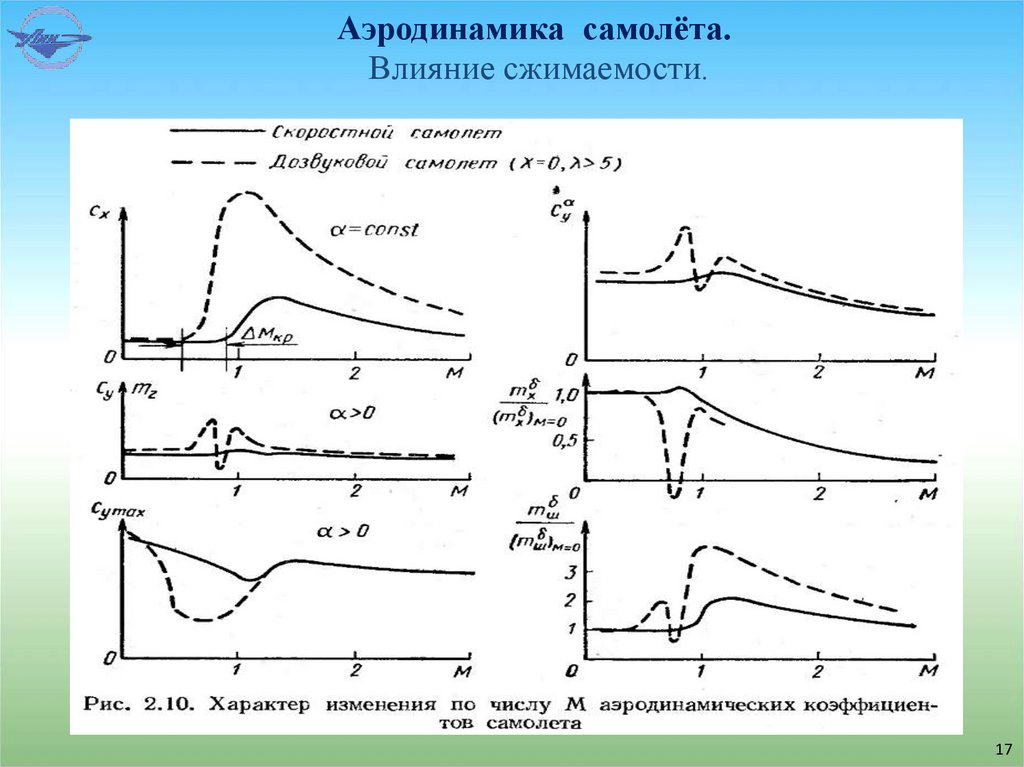
17.
Аэродинамика самолёта.Влияние сжимаемости.
17
18. Аэродинамика самолёта.
Влияние сжимаемости. Совершенствование крыла.18
19. Аэродинамика самолёта.
Аэродинамические силы и моменты крылаВлияние стреловидности на cy(α) крыла
19
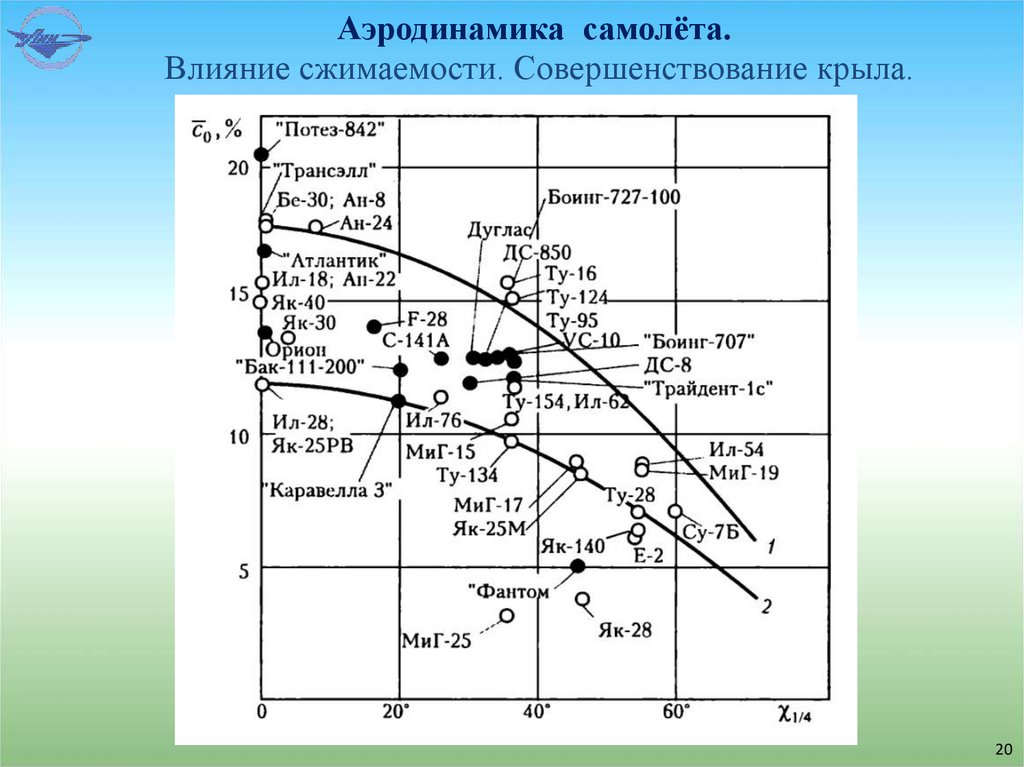
20.
Аэродинамика самолёта.Влияние сжимаемости. Совершенствование крыла.
20
21. Лётно-технические характеристики самолёта.
• Область скоростей и высот полета.• Максимальные достижимые
скорости полета,
• Статический потолок —
теоретический и практический,
• Скороподъёмность во всем
диапазоне скоростей и высот
полета,
• Наивыгоднейшие скорости набора
высоты,
• Дальность и продолжительность
полёта,
• Расход топлива, время и путь в
наборе, снижении и ГП.
Техническая дальность (теоретическая) – до полного израсходования топлива.
Практическая дальность – с учетом гарантийного остатка топлива
(7 … 10% от полной заправки).
Тактическая дальность – с учетом запаса топлива на выполнение задания,
не связанного с продвижением по маршруту.
21
22. Лётно-технические характеристики самолёта.
Подготовка к проведению исследованийИсследование ЛТХ начинают после устранения всех недочётов в УУ,
после устранения недостатков всех систем, устранения всех претензий.
Предварительные наземные работы:
•Взвешивание и центровка, нивелировка,
• Проверка регулировки двигателей, контрольные гонки,
• Определение поправок к показаниям скорости и высоты.
• Оборудование СБИ, тарировка топливомеров и расходомеров,
Главные параметры в СБИ: высота (давление), скорость, число М,
температура воздуха, остаток топлива, обороты двигателей, перегрузки,
аэродинамическая конфигурация ЛА.
Специальных мер безопасности при исследованиях ЛТХ нет.
22
23. Лётно-технические характеристики самолёта.
Приведение параметров полёта к заданным условиямНеобходимость приведения ЛТХ вызвана причинами:
• тем, что все указанные характеристики сильно зависят от давления и
температуры окружающей среды,
• испытания проводятся в тех условиях, какие есть, для всех возможных
полётных условий определить или рассчитать характеристики невозможно,
поэтому их рассчитывают для стандартных (приводят к стандартным).
• необходимостью сравнения характеристик различных самолётов и
различных модификаций одного самолёта.
Влияющие на ЛТХ эксплуатационные факторы:
1. Полётный вес,
2. Конфигурация самолёта.
3. Настройки автоматики двигателя,
Влияющие на ЛТХ атмосферные условия:
1. Давление, температура
В основе методов приведения лежат принципы подобия режимов полёта
и подобия режимов работы ТРД.
23
24. Лётно-технические характеристики самолёта.
Приведённые параметры полётаM пр М ф ;
Vпр Vф
a пр a ф
– приведённое число Маха,
a пр
Tпр
Vпр = Vф
Vф
M ф a по – приведённая скорость полёта,
aф
Tф
G пр G ф
pпр
pф
– приведённый вес (сила тяжести)
nпр = nф
– приведённая перегрузка,
pпр
Pпр Pф
pф
– приведённая тяга,
где: апр, pпр, Тпр – скорость звука, давление и температура воздуха
на высоте приведения,
pф, Тф – давление и температура воздуха на фактической высоте,
24
25. Лётно-технические характеристики самолёта.
Приведённые параметры полётаTпр
Lпр Vпр t пр Lф
Tф
Tпр
t пр t ф
Tф
ω пр ω ф
Tф
Tст
Tпр
Vy пр Vy ф
Tф
G т пр
pпр
q пр
qф
Vпр
pф
– приведённая длина пути (дальность),
– приведённое время,
– приведённая угловая скорость,
– приведённая вертикальная скорость, или
скороподъёмность.
– приведённый массовый километровый расход
топлива,
где: апр, pпр, Тпр – скорость звука, давление и температура воздуха
на высоте приведения,
pф, Тф – давление и температура воздуха на фактической высоте,
25
26. Общая методика методики приведения ЛТХ
Приведение ЛТХ выполняется в два этапа:1 – к стандартным атмосферным условиям (давление, температура а
также полётная масса и обороты двигателя) при фактической
конфигурации;
высоту предпочтительно выбирать по методу эквивалентной высоты.
2 – к заданным эксплуатационным условиям (положению
регулируемых элементов, внешние подвески, … ).
Для этого надо знать влияние на исследуемую характеристику
отличий конфигурации, подвесок, …
26
27.
Лётно-технические характеристики самолёта.Определение характеристик скороподъёмности
и статического потолка.
Цель испытаний:
• определить зависимости Vy max= f(H, V).
• проверить полученные зависимости в контрольном полёте.
При выполнении режимов в полёте используют методы:
• метод зубцов– в полёте выполняются площадки с набором
высоты длительностью 15…20 с на 4…6 высотах с
максимальными значениями оборотов и на нескольких
скоростях (5...6 значений на каждой высоте).
• метод разгонов – в полёте выполняются разгоны на 4…6
высотах.
При обработке используют метод сеток характеристик.
27
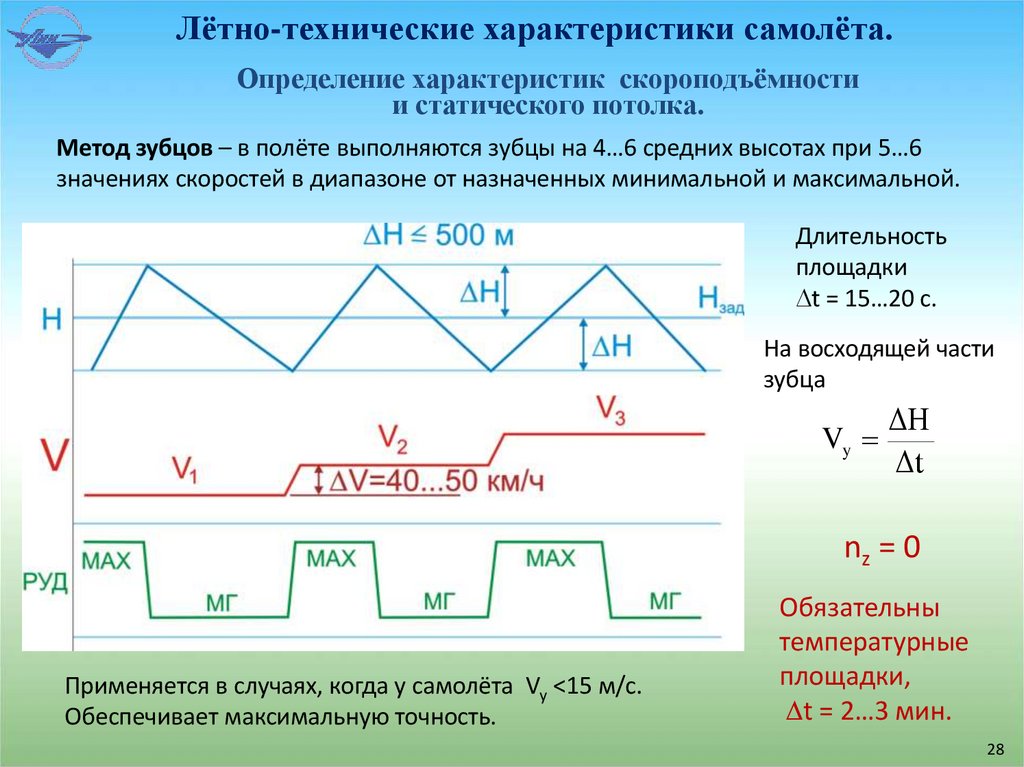
28.
Лётно-технические характеристики самолёта.Определение характеристик скороподъёмности
и статического потолка.
Метод зубцов – в полёте выполняются зубцы на 4…6 средних высотах при 5…6
значениях скоростей в диапазоне от назначенных минимальной и максимальной.
Длительность
площадки
Dt = 15…20 c.
На восходящей части
зубца
Vy
ΔH
Δt
nz = 0
Применяется в случаях, когда у самолёта Vy <15 м/с.
Обеспечивает максимальную точность.
Обязательны
температурные
площадки,
Dt = 2…3 мин.
28
29. Лётно-технические характеристики самолёта.
Определение характеристикскороподъёмности
и статического потолка.
Метод разгонов – в полёте выполняются разгоны
на 4…6 высотах до максимально допустимой или
максимально возможной по тяге скорости.
= P - X;
m· V
x
P -X
V
= x
n xa ;
g
G
Px - X - G·sin θ 0;
Vy
sinθ
;
V
Px - X Vy
n xa ;
G
V
Vy V n xa
nz = 0
Обязательны температурные площадки,
Dt = 2…3 мин.
29
30. Лётно-технические характеристики самолёта.
Определение характеристик скороподъёмностии статического потолка.
30
31. Лётно-технические характеристики самолёта.
Определение характеристик скороподъёмностии статического потолка.
31
32. Лётно-технические характеристики самолёта.
Определение характеристик дальностии продолжительности полёта
При выполнении режимов в полёте используют методы:
• метод оборотов на прямолинейных площадках – в полёте
выполняются площадки длительностью 1.5…2 мин на 5…8 высотах
с различными значениями оборотов и скоростей (5..8 значений на
каждой высоте.)
• метод виражей – модификация метода оборотов для увеличения
приведённого веса – в полёте выполняются не прямолинейные
площадки, а виражи с заданными величинами перегрузки,
• метод оборотов на режимах набора высоты и снижения – в
полёте выполняются зубцы на 4…6 средних высотах с различными
значениями скоростей и оборотов (4..5 значений на каждой
высоте.)
При обработке используют метод сеток характеристик.
Перед испытаниями выполняют контрольные гонки двигателя.
32
33. Лётно-технические характеристики самолёта.
Определение характеристик дальностии продолжительности полёта
Цель испытаний: определение зависимостей
qчас = f(H,М), qкм = f(H,М);
Перед испытаниями выполняют контрольные гонки двигателя.
33
34. Лётно-технические характеристики самолёта.
Методы увеличения дальностии продолжительности полёта
Дозаправка топливом в полёте
34
35.
Лётно-технические характеристики самолёта.Методы увеличения дальности
и продолжительности полёта
Подвесные топливные баки
Profilib.com
подвесной топливный бак конструкции Запанованного емкостью 100 литров.
Михаил Маслов - Истребитель И-15бис - стр 5profilib.com
35
36. Лётно-технические характеристики самолёта.
Определение максимально достижимых скоростей полёта(при возможности их достижения)
Методика выполнения режимов в полёте
При выполнении режимов в полёте
используют методы:
• метод оборотов – в полёте выполняются
разгоны и прямолинейные площадки на
4…6 высотах с различными значениями
оборотов, близкими к максимальным
(4..5 значений на каждой высоте.)
• метод виражей – модификация метода
оборотов – в полёте выполняются не
прямолинейные площадки, а виражи с
заданными величинами перегрузки.
При обработке используют метод сеток
характеристик.
Следить за постоянством Gпр
для одной группы площадок!
36
37.
Взлётно-посадочные характеристики самолётовОбщая схема взлёта
37
38. Взлётно-посадочные характеристики самолётов
Первый этап лётных исследований ВПХ- Исследование УУ во взлётной и посадочной конфигурациях, построение
балансировок по скорости и перегрузке;
- Исследование характеристик набора высоты (скороподъёмность) во взлётной
и посадочной конфигурациях со всеми работающими двигателями и одним
отказавшим. Определение скорости полёта при Vymax и скорости при
максимальном градиенте;
- Исследование характеристик планирования (снижения) в посадочной
конфигурации.
- Определение скоростей (α, cy) сваливания во взлётной и посадочной
конфигурациях;
- Определение поправок ПВД и связи αист = f(αмест);
- Определение расходов топлива на режимах набора высоты и снижения.
38
39.
Взлётно-посадочные характеристики самолётовОсновной этап лётных исследований ВПХ
• Уточнение характерных скоростей
• Уточнение характерных дистанций
Методы измерения дистанций
Внешнетраекторные измерения:
- Метод наблюдателей,
- Кинотеодолитный метод,
- Применение РЛС,
- Применение спутниковой системы навигации.
Бортовые измерения:
- Интегрирование перегрузки,
- Расчёт дистанции по оборотам колёс.
39
40. Взлётно-посадочные характеристики самолётов
Характерные скорости на взлётеНа земле.
VMCG (Vminэ.р) – Минимальная эволютивная скорость разбега (Minimum Control
Ground Speed),
V1 – скорость принятия решения на прекращение или продолжение взлёта,
VMU (Vminотр) – Минимальная скорость отрыва на взлете (Minimum Unstick
Speed),
VR (Vн ст.) – Скорость в момент подъёма передней стойки шасси (Rotation Speed),
VLOF(Vотр) – Скорость отрыва на взлете (Landing off Flight Speed).
VS1
V2MIN
VMCA
V2
1…3 s
VMCG
VEF
V1
VMU
VR
VLOF
40
41. Взлётно-посадочные характеристики самолётов
Характерные скорости на взлётеВ полёте
VS1 – Скорость сваливания с выпущенной механизацией.
V2 (V2) – Безопасная скорость взлета (Take-off Safety Speed) с выпущенной
механизацией.
V3 (V3) – Безопасная скорость взлета (Take-off Safety Speed) с убранной
механизацией.
VMC или VMCA – Минимальная эволютивная скорость взлета (Minimum Control Air
Speed) – при которой в случае внезапного отказа критического двигателя
возможно сохранять управление самолетом с этим всё еще неработающим
двигателем и выдерживать режим прямолинейного полета при угле крена не
более 5 . Скорость VMC (VMCA) не должна превышать 1,2VS.
VS1
V2MIN
VMCA
V2
1…3 s
VMCG
VEF
V1
VMU
VR
VLOF
41
42. Взлётно-посадочные характеристики самолётов
Прерванный и продолженный взлёт при отказе двигателяНормальный взлет — это взлет при нормальной работе всех двигателей,
систем и агрегатов самолета, выполняемый с использованием
предусмотренной РЛЭ техники пилотирования.
Продолженный (завершенный) взлет — это взлет, протекающий как
нормальный до момента отказа одного двигателя в процессе взлета, после чего
взлет продолжается и завершается с одним отказавшим двигателем.
Прерванный взлет — это взлет, протекающий как нормальный.до момента
отказа двигателя, после чего начинается прекращение взлета с последующим
торможением самолета до полной его остановки на летной полосе ЛП
Цели проведения испытаний: определение сбалансированной длины ВПП и
скорости принятия решения
42
43. Взлётно-посадочные характеристики самолётов
Прерванный и продолженный взлёт при отказе двигателяL
Продолженный взлёт
Lсб
Прерванный взлёт
V1
V
Сбалансированная длина ВПП – минимальная длина, обеспечивающая
безопасность взлёта в случае отказа двигателя.
Скорость принятия решения – максимальная земная индикаторная
скорость, при которой, в случае отказа двигателя, возможно прерывание
взлёта.
Меры безопасности:
- проведение предварительных исследований, математическое моделирование,
- подготовка самолёта и экипажа, контроль состояния тормозной системы,
- длина ВПП должна быть в 1.5 раза больше, чем необходимая по расчёту для
разгона до скорости отрыва самолёта при всех работающих двигателях и
последующего полного торможения
43
44. Взлётно-посадочные характеристики самолётов
Общая схема посадки44
45. Взлётно-посадочные характеристики самолётов
Характерные скорости на посадкеVMCL (Vminз.п) – минимальная эволютивная скорость захода на посадку со
всеми работающими двигателями (Minimum Control Landing Speed) является
земной индикаторной скоростью, при которой в случае отказа критического
двигателя возможно сохранять управление самолетом с этим всё еще
неработающим двигателем и выдерживать режим прямолинейного полета при
угле крена не более 5 .
VMCL-2 (Vmin з.п-2) – Минимальная эволютивная скорость захода на посадку с
одним неработающим двигателем. (Minimum Control Landing Speed – 2).
VREF(Vз.п) – Скорость захода на посадку со всеми работающими двигателями
(Reference Engine Flight Landing Speed) – угол планирования равен глиссадному.
45
46. Взлётно-посадочные характеристики самолётов
Общая схема ухода на второй круг46
47.
Взлётно-посадочные характеристики самолётовПриведение ВПХ к нормальным условиям.
Методика приведения ВПХ самолета к заданным условиям.
Приведение выполняется исходя из теории подобия, так же, как параметры
ЛТХ.
Первым выполняется приведение к стандартным внешним условиям с
использованием известных формул и метода сеток характеристик.
Затем – приведение к стандартной конфигурации (изменилось положение
закрылков, ЦМ, …) с использованием метода дифференциальных поправок.
Допущения при приведении:
• Viз не зависит от атмосферных условий, зависит только от веса;
• коэффициенты cx, cy, cz, mx, my, mz зависят только от угла атаки и числа М
(если оно изменяется более, чем на 0.05).
Приводимые параметры: дистанции, истинные скорости, скороподъёмность.
Учитывается: давление (высота аэродрома), температура, вес, встречный и
попутный ветер.
Для длин разбега и пробега дополнительно учитывается средний наклон
полосы.
47
48.
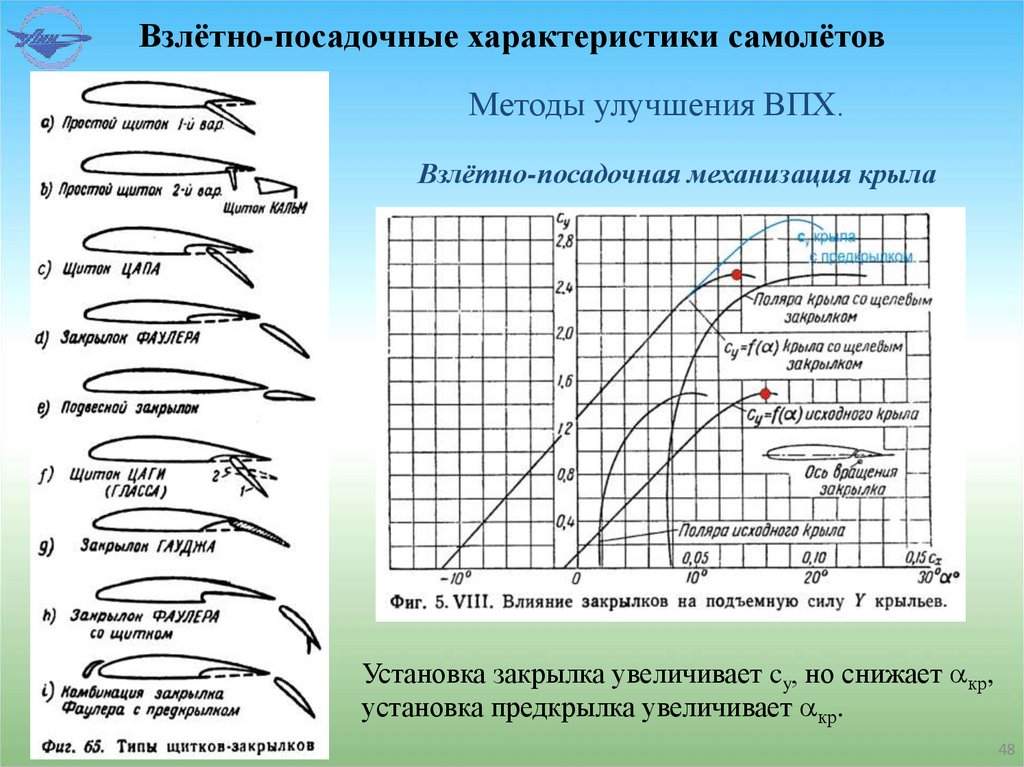
Взлётно-посадочные характеристики самолётовМетоды улучшения ВПХ.
Взлётно-посадочная механизация крыла
Установка закрылка увеличивает cy, но снижает кр,
установка предкрылка увеличивает кр.
48
49.
Характеристики маневренности самолётовОпределения и понятия
Маневренность – способность самолета максимально быстро изменять
параметры своего положения и движения в воздушном пространстве:
координаты, величину и направление скорости, угловое положение.
Чем выше скорость изменения указанных параметров – тем выше
маневренность.
Различают предельные и эксплуатационные характеристики
маневренности.
предельные – расчётные характеристики, показывают максимально
достижимый уровень маневренности для данного самолёта,
эксплуатационные – фактические, ниже предельных вследствие наличия
приёмистости двигателя, наличия запаздывания при отклонении рулей,
немгновенного выхода самолёта на nymax при выполнении виража, и т.д.
Разница между ними показывает направление совершенствования
самолёта.
49
50.
Характеристики маневренности самолётовОпределения и понятия
Факторы, оказывающие влияние на маневренные возможности
современного самолёта.
• тяга двигателя в зависимости от высоты и скорости,
• приемистость двигателя в зависимости от высоты,
• диапазон предельно допустимой перегрузки ny и скорость её изменения,
которые в свою очередь определяются несущей способностью крыла – cy(α, М),
аэродинамическим качеством самолёта – cx(cy, М), эффективностью и
скоростью отклонения рулей, скоростью выхода воздушных тормозов.
Базовая конфигурация: Полетная конфигурация самолета с убранными шасси
и тормозными щитками и с основным, заданным в ТТЗ, вариантом подвесок.
50
51.
Характеристики маневренности самолётовОпределения и понятия
Показатели маневренности разделяют на общие и частные.
К общим показателям маневренности самолёта относятся:
1. диапазон высот и скоростей по высотам (график),
2. скороподъёмность по высотам (график),
3. темп разгона и торможения,
4. максимальная располагаемая величина ωх,
5. диапазон располагаемых перегрузок nx и ny,
6. время достижения заданной перегрузки или угла (крена, скольжения) или
ωх при максимальном отклонении (или усилии, или другому ограничению)
соответствующего органа управления в зависимости от скорости и высоты
полета и конфигурации самолета.
51
52.
Характеристики маневренности самолётовОбщие показатели маневренности
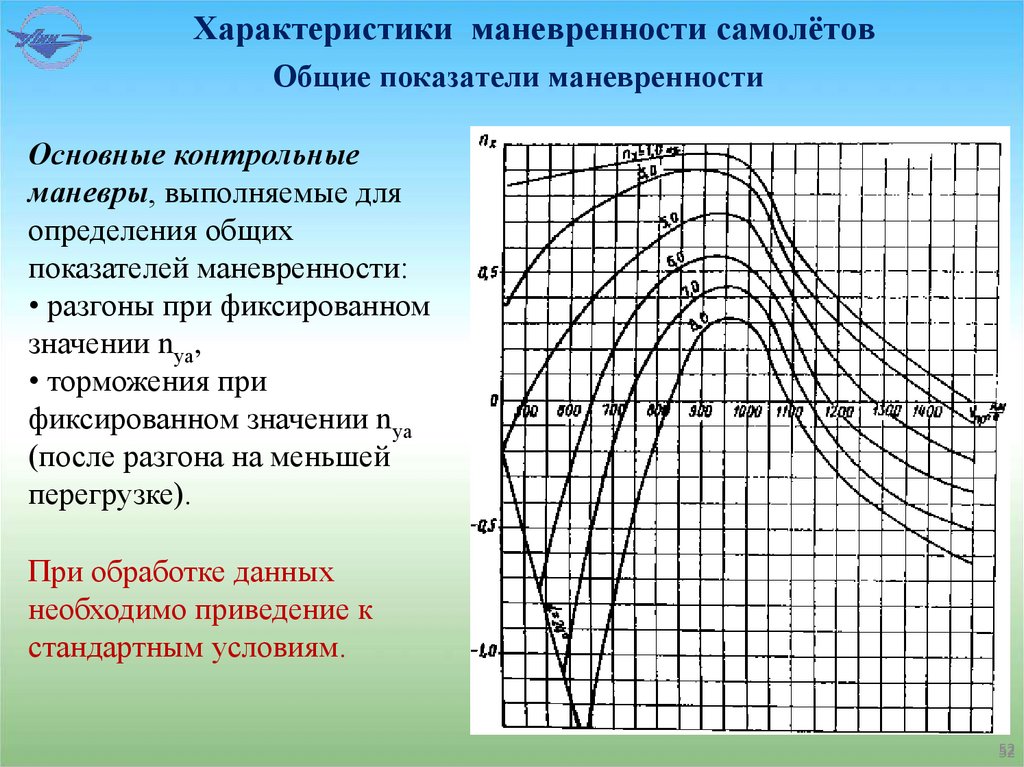
Основные контрольные
маневры, выполняемые для
определения общих
показателей маневренности:
• разгоны при фиксированном
значении nyа,
• торможения при
фиксированном значении nyа
(после разгона на меньшей
перегрузке).
При обработке данных
необходимо приведение к
стандартным условиям.
52
53.
Характеристики маневренности самолётовОпределения и понятия
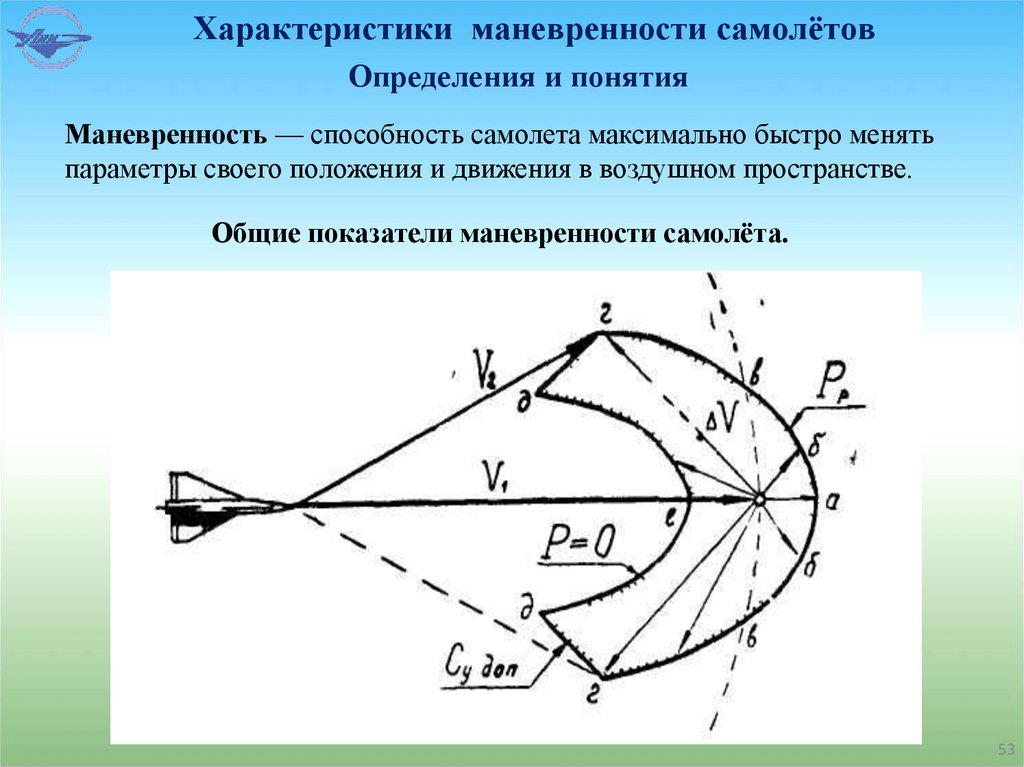
Маневренность –– способность самолета максимально быстро менять
параметры своего положения и движения в воздушном пространстве.
Общие показатели маневренности самолёта.
53
54.
Характеристики маневренности самолётовОпределения и понятия
Маневренность –– способность самолета максимально быстро менять
параметры своего положения и движения в воздушном пространстве.
Частные показатели маневренности
характерные параметры различных фигур пилотажа.
Манёвр – преднамеренное изменение режима полёта по определённому
закону управления.
Время выполнения манёвра – время перехода из заданного начального
состояния в конечное, характеризуемых координатами центра масс,
величиной и ориентацией вектора скорости и угловыми положениями.
Мера маневренности - время перехода из одной точки пространства в
другую (изменения углового положения), также маневренность самолета
определяется граничными значениями областей маневрирования самолета в
пространстве координат и скоростей, радиусами кривизны траектории и т.д,
54
55.
Характеристики маневренности самолётовОпределения и понятия
Частные показатели маневренности
Область выполнимости фигуры: Множество таких начальных значений
скоростей и высот, из которых данный маневр может быть выполнен при
рекомендованной технике пилотирования и режимом работы двигателя без
нарушения ограничений, наложенных на параметры движения самолета.
Минимальная (максимальная) высота ввода в манёвр: Высота ввода,
обеспечивающая его безопасное завершение при рекомендованной технике
пилотирования.
Максимальная скорость ввода в манёвр: Скорость ввода, обеспечивающая
непревышение на траектории ограничения по скорости (числу М), а также
непревышение величины потери высоты на маневре при рекомендованной
технике пилотирования и заданной высоте ввода в маневр.
55
56.
Характеристики маневренности самолётовОпределения и понятия
Частные показатели маневренности
Минимально допустимая скорость маневрирования: Минимальная
скорость полёта самолёта, на которой возможно выполнение криволинейных
манёвров с нормированной заданной перегрузкой ny.
Примечание – Минимально допустимая скорость маневрирования зависит от
класса самолёта (т.к. различны cyдоп), типа и цели выполняемого манёвра,
характеристик устойчивости и управляемости и силовой установки.
Минимально допустимая скорость маневрирования устанавливается для
маневренных и ограниченно маневренных самолётов.
Околонулевые скорости: Скорости полёта, при которых невозможно
выполнение горизонтального полёта в данной конфигурации самолёта.
56
57.
Характеристики маневренности самолётовЧастные показатели маневренности
Петля Нестерова — фигура
пилотажа, при выполнении которой
самолет описывает в вертикальной
плоскости замкнутую кривую,
расположенную выше точки ввода.
V1 Vmin
1
R
mV 02
mV12
π R ср (Pср X ср )
2 m g R ср
2
2
2
0
mV
mV
2 π R ср (Pср X ср )
2
2
g
ω z т n y cos θ
V
2
2
0
2
V2
R
g (n y cos θ)
R и z тр переменны на траектории петли.
57
58.
Характеристики маневренности самолётовЧастные показатели маневренности
Петля (косая петля): Маневр, при выполнении которого самолет описывает
в некоторой наклонной плоскости замкнутую кривую, расположенную выше
точки ввода. Траектория фигуры лежит в плоскости, определяемой начальным
углом крена.
Цели лётных исследований петли и косой петли.
Необходимо определить для различных весов:
- оптимальную перегрузку – обеспечивающую минимальные потери энергии
на восходящей части в зависимости от высоты, веса, РРД – МАХ.
- минимальную скорость ввода в петлю при оптимальной перегрузке
в зависимости от высоты, веса при РРД = МАХ, РРД = Nom.
Методика исследований.
Выполняют предварительные расчёты, в ЛИ начинают со средних высот
(3…5 км) и больших скоростей.
Шаг по высоте – 2…3 км, шаг по скорости – 20…40 км/ч.
Косые петли изучают после прямых.
Шаг по углу наклона плоскости фигуры – 10 гр.
58
59.
Характеристики маневренности самолётовЧастные показатели маневренности
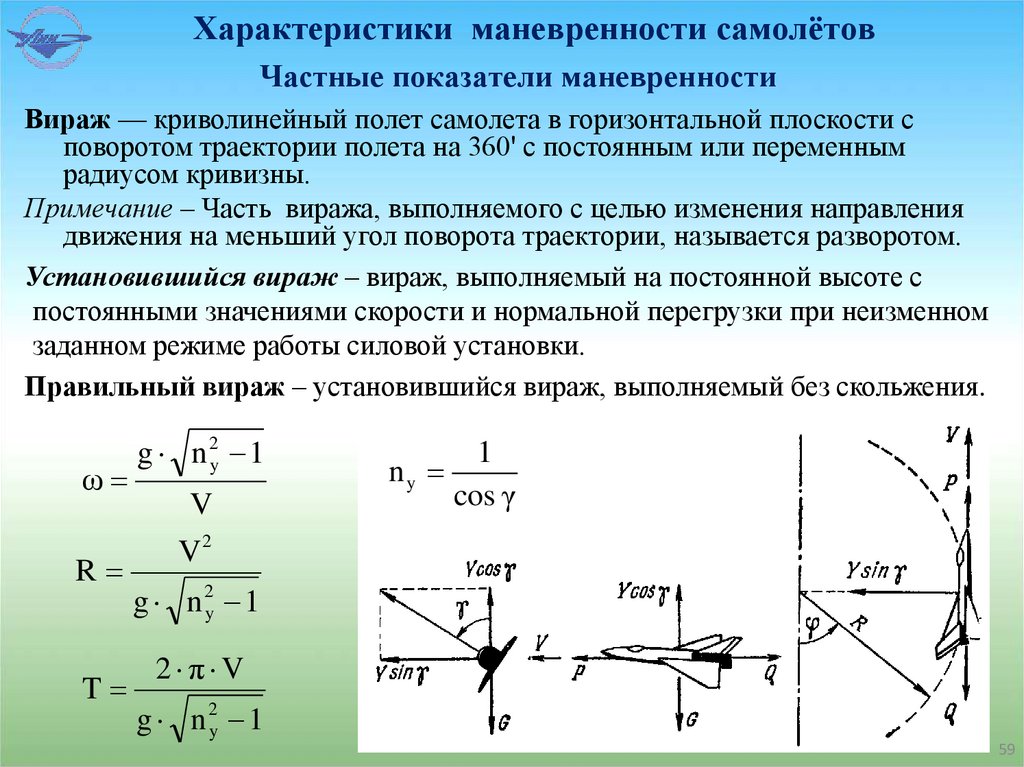
Вираж — криволинейный полет самолета в горизонтальной плоскости с
поворотом траектории полета на 360' с постоянным или переменным
радиусом кривизны.
Примечание – Часть виража, выполняемого с целью изменения направления
движения на меньший угол поворота траектории, называется разворотом.
Установившийся вираж – вираж, выполняемый на постоянной высоте с
постоянными значениями скорости и нормальной перегрузки при неизменном
заданном режиме работы силовой установки.
Правильный вираж – установившийся вираж, выполняемый без скольжения.
ω
R
T
g n 2y 1
V
ny
1
cos γ
V2
g n 2y 1
2 π V
g n 2y 1
59
60.
Характеристики маневренности самолётовЧастные показатели маневренности
Вираж
Вираж с креном до 45° называется мелким, а с креном более 45° —
глубоким.
На мелком вираже высоту держат тангажом (перегрузкой), на глубоком –
креном.
Вираж, предельный по тяге — правильный вираж, выполняемый при
максимальной тяге (на форсаже) на заданной скорости.
Вираж, предельный по перегрузке — вираж, выполняемый при
предельно допустимой (располагаемой) перегрузке.
Форсированный вираж — вираж, выполняемый с уменьшением скорости и
радиуса кривизны траектории.
Если лётчик в любой момент неустановившегося разворота прекратит
выбирание ручки на себя и перейдёт на пилотирование с α=const (регулируя
высоту креном), то самолёт самостоятельно найдёт положение устойчивого
равновесия по скорости.
60
61.
Характеристики маневренности самолётовЧастные показатели маневренности
Вираж
Цели лётных исследований. Необходимо определить:
• для установившихся виражей – зависимость скорости на вираже и радиуса
от высоты, веса, перегрузки, режима работы двигателя.
• для неустановившихся виражей – зависимость темпа торможения от
скорости ввода (из установившегося ГП), высоты, веса, перегрузки, режима
работы двигателя.
• все полученные характеристики должны быть приведены к нормальным
условиям.
61
62.
Характеристики маневренности самолётовМеры безопасности при лётных испытаниях
• Строго соблюдать порядок выполнения задания и рекомендованные методы
выполнения маневров.
• Не превышать максимальные скорости и числа М полета;
• Не допускать превышения максимальной эксплуатационной перегрузки по
прочности nу доп, подходить к максимальным постепенно.
• Если достигнута перегрузка nу = 0.85 и более, то в этом полете других
режимов не выполнять. После полёта выполняется нивелировка самолета.
• Не выходить за ограничения по минимальной скорости полета, максимально
допустимому значению су доп.
• Режимы с выходом на околокритические углы атаки следует делать
кратковременными (без выдерживания заданной величины Хв) для
предотвращения попадания в штопор. Эти режимы рекомендуется выполнять
на больших высотах (Н = 10…12 км).
• Должны быть разработаны рекомендации по действиям летчика в случае
потери пространственной ориентировки, потери скорости, сваливания,
попадания в штопор.
62
63. Устойчивость и управляемость самолёта
Основные определенияПродольное движение
Короткопериодическое движение
Длиннопериодическое движение
Короткопериодическое движение
Фугоидное (длиннопериодическое) движение
Параметры
короткопериодического
продольного движения:
– угол атаки,
z – угловая скорость тангажа,
ny – перегрузка нормальная,
nx – перегрузка продольная.
Параметры фугоидного
продольного движения:
V – воздушная скорость,
H – высота полёта геометрическая,
– угол тангажа,
– угол наклона траектории,
63
64. Устойчивость и управляемость самолёта
Основные определенияБоковое движение
По крену
По рысканию
Короткопериодическое движение
Параметры
короткопериодического
бокового движения:
– угол скольжения,
x – угловая скорость крена,
y – угловая скорость рыскания,
nz – перегрузка боковая
Длиннопериодическое движение
Параметры фугоидного
бокового движения:
– угол скольжения,
– угол крена,
– угол рыскания,
x – угловая скорость крена,
y – угловая скорость рыскания,
nz – перегрузка боковая
64
65. Устойчивость и управляемость самолёта
Устойчивость самолета – его способность сохранять заданный режим полета исамостоятельно, без вмешательства летчика возвращаться к нему после прекращения
действия возмущений.
Устойчивость рассматривается только для состояния равновесия.
Статическая устойчивость – это свойство самолета, означающее, что при
отклонении от состояния равновесия создаётся аэродинамический момент,
действующие в противоположном отклонению направлении.
Наличие статической устойчивость – есть необходимое, но недостаточное условие
динамической устойчивости самолета.
Динамическая устойчивость – полная и истинная устойчивость самолёта.
65
66. Устойчивость и управляемость самолёта
Основные определенияСтатическая устойчивость – это свойство самолета, означающее, что при
отклонении от состояния равновесия создаётся аэродинамический момент,
действующие в противоположном отклонению направлении.
m 0;
α
z
m 0;
cy
z
66
67. Устойчивость и управляемость самолёта
Динамика движения самолётаСтатически неустойчив,
Динамически не устойчив
Статически устойчив,
Динамически не устойчив
Статически устойчив,
Динамически устойчив
67
68. Наземная подготовка самолёта к ЛИ
Устойчивость и управляемость самолётаНаземная подготовка самолёта к ЛИ
Наземная подготовка (наземные работы) необходимы для
обеспечения качества, эффективности и безопасности
проведения лётных испытаний, проводятся до их начала.
Методика наземной подготовки – первая часть общей методики
лётных испытаний.
Включает:
Изучение документации
Взвешивание и определение положения ЦМ.
Обмер и нивелировка.
Оборудование самолёта СБИ.
Определение АФЧХ системы управления самолёта с СДУ.
Определение силы трения и люфтов в механической проводке
управления.
Подготовка экипажа
68
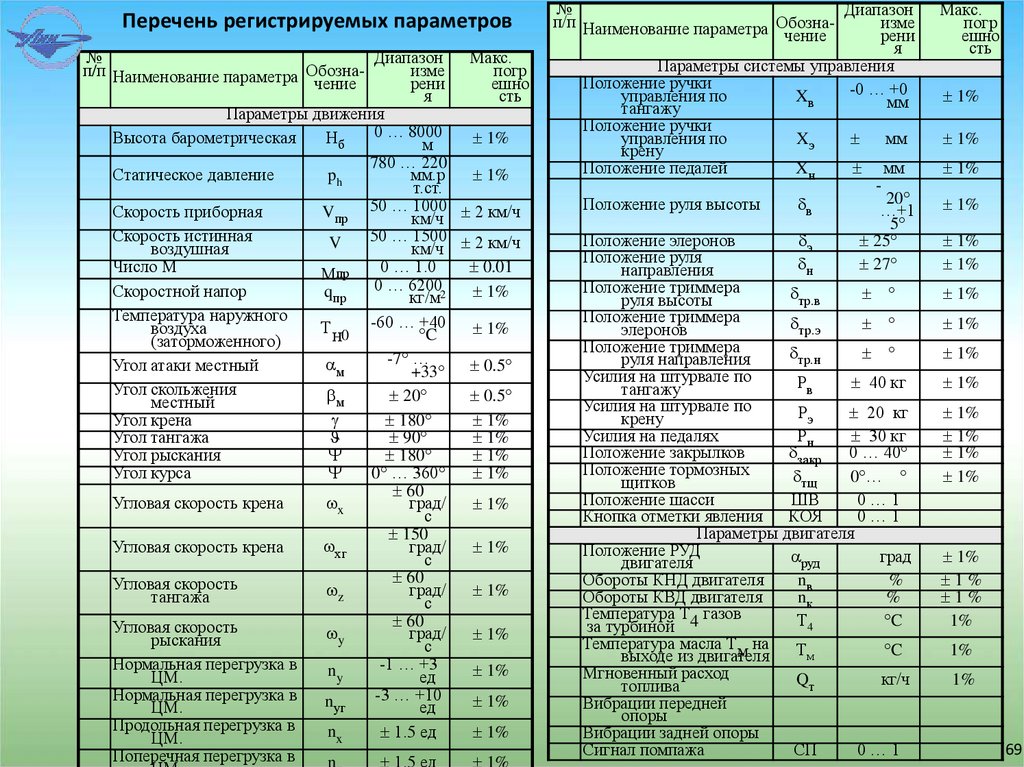
69.
Перечень регистрируемых параметров№
Диапазон
Макс.
п/п Наименование параметра Обознаизме
погр
чение
рени
ешно
я
сть
Параметры движения
0 … 8000
Нб
Высота барометрическая
1%
м
780 … 220
Статическое давление
ph
мм.р
1%
т.ст.
1000 2 км/ч
Vпр 50 … км/ч
Скорость приборная
Скорость истинная
50 … 1500 2 км/ч
V
воздушная
км/ч
Число М
0 … 1.0
0.01
Мпр
0
…
6200
qпр
Скоростной напор
1%
кг/м2
Температура наружного
+40
Тн0 -60 … C
воздуха
1%
(заторможенного)
-7° …
м
Угол атаки местный
+33° 0.5°
Угол скольжения
м
20°
0.5°
местный
Угол крена
180°
1%
Угол тангажа
90°
1%
Угол рыскания
180°
1%
Угол курса
0° … 360°
1%
60
x
Угловая скорость крена
град/
1%
с
150
xг
град/
Угловая скорость крена
1%
с
60
Угловая скорость
z
град/
1%
тангажа
с
60
Угловая скорость
y
град/
1%
рыскания
с
Нормальная перегрузка в
-1 … +3
ny
1%
ЦМ.
ед
Нормальная перегрузка в
-3 … +10
nyг
1%
ЦМ.
ед
Продольная перегрузка в
nx
1.5 ед
1%
ЦМ.
Поперечная перегрузка в
n
1.5 ед
1%
№
Диапазон
п/п Наименование параметра Обознаизме
чение
рени
я
Параметры системы управления
Положение ручки
-0 … +0
управления по
Xв
мм
тангажу
Положение ручки
управления по
Xэ
мм
крену
Положение педалей
Xн
мм
20°
Положение руля высоты
в
…+1
5°
Положение элеронов
э
25°
Положение руля
н
27°
направления
Положение триммера
тр.в
°
руля высоты
Положение триммера
тр.э
°
элеронов
Положение триммера
тр.н
°
руля направления
Усилия на штурвале по
Рв
40 кг
тангажу
Усилия на штурвале по
Рэ
20 кг
крену
Усилия на педалях
Рн
30 кг
Положение закрылков
закр
0 … 40°
Положение тормозных
тщ
0°… °
щитков
Положение шасси
ШВ
0…1
Кнопка отметки явления КОЯ
0…1
Параметры двигателя
Положение РУД
руд
град
двигателя
Обороты КНД двигателя
nв
%
Обороты КВД двигателя
nк
%
Температура Т4 газов
Т4
C
за турбиной
Температура масла Тм на
Тм
C
выходе из двигателя
Мгновенный расход
Qт
кг/ч
топлива
Вибрации передней
опоры
Вибрации задней опоры
Сигнал помпажа
СП
0…1
Макс.
погр
ешно
сть
1%
1%
1%
1%
1%
1%
1%
1%
1%
1%
1%
1%
1%
1%
1%
1%
1%
1%
1%
1%
69
70. Определение устойчивости самолёта в ЛИ
Устойчивость и управляемость самолётаОпределение устойчивости самолёта в ЛИ
Балансировочная зависимость по скорости – график зависимости
балансировочного положения руля от скорости (или числа М) в прямолинейном полёте
самолёта без крена и скольжения при перегрузке ny=1.
m Z m z0 mαz α mδz δ в 0;
m Z0 mαz α
δ в бал
;
δ
mz
Устойчивость по скорости – способность самолёта восстанавливать исходную
скорость полёта, изменённую действием возмущения, без вмешательства лётчика после
прекращения действия возмущения
70
71. Балансировка по скорости
Устойчивость и управляемость самолётаБалансировка по скорости
Режим зубцов
Режимы разгона и торможения
72. Балансировка по скорости
Факторы, влияющие на балансировку по скорости73. Устойчивость и управляемость самолёта
Определение устойчивости самолёта в ЛИБалансировочная зависимость по перегрузке – график зависимости
балансировочного положения руля от перегрузки в криволинейном полёте самолёта
при постоянном числе М
m Z mz0 mαz α mωz z ωz mδz δв 0;
m Z0 mαz α mωz z ωz
δв бал
;
δ
mz
Устойчивость по перегрузке – способность самолёта восстанавливать исходную
перегрузку полёта, изменённую действием возмущения, без вмешательства лётчика
после прекращения действия возмущения
73
74. Балансировка по перегрузке
Устойчивость и управляемость самолётаБалансировка по перегрузке
Дача
Вираж-спираль
Предпочтительнее выполнять
двусторонние дачи
74
75. Устойчивость по перегрузке
Влияние условий полёта на устойчивость по перегрузке75
76. Устойчивость и управляемость самолёта
Управляемость самолета – его способность изменять режим полета исвое положение в пространстве соответственно управляющим действиям
летчика или автопилота.
В области линейного изменения АХ
Количественная
характеристика
управляемости
=
Величина управляющего воздействия лётчика
(Хв, Рв, в, Хэ, Рэ, э, Хн, Рн, н,)
Величина изменения управляемого параметра
( z, , ny, x, y, , )
При изменении конфигурации самолёта (стреловидность крыла, закрылки,
шасси, тормозные щитки, сброс груза, …)
Количественная
характеристика
управляемости
=
Величина дополнительного управляющего
воздействия (Хв, Рв, в, Хэ, Рэ, э, Хн, Рн, н,)
для сохранения режима полёта
При выводе самолёта на предельно допустимые значения параметров
( max, x max, ny max, max, … )
Количественная
характеристика
управляемости
=
Величина управляющего воздействия лётчика
(Хв, Рв, в, Хэ, Рэ, э, Хн, Рн, н,)
76
77. Продольная динамическая устойчивость
Устойчивость и управляемость самолётаПродольная динамическая устойчивость
Ai
Ai
hT
m зат
e
Ai T Ai e hT
77
78. Продольная динамическая устойчивость
Устойчивость и управляемость самолётаПродольная динамическая устойчивость
78
79. Требования к динамической устойчивости
Устойчивость и управляемость самолётаТребования к динамической устойчивости
Величина заброса перегрузки Δ n у
Уровень
требований
1
2
3
А
0.2
0.4
0.6
Режим полёта
Б
0.2
0.4
0.6
В
0.3
0.5
0.6
Величина времени срабатывания tсраб. (не больше)
Режим
А
Б
В
Уровень
требов.
1
2, 3
1
2, 3
1
2, 3
I
1.0
1.5
2.0
2.5
2.0
2.5
Класс самолёта
II
1.0
1.5
2.0
2.5
2.0
2.5
III
2.0
3.0
2.5
3.5
3.0
4.5
79
80. Методика исследований
Меры безопасности при ЛИ УУСпециальных мер, повышающих безопасность летных испытаний
по определению характеристик устойчивости и управляемости в
эксплуатационной области режимов полета не
предусматривается.
Меры безопасности обеспечиваются методически:
• Рациональный выбор диапазона высот.
• Строгое соблюдение ограничений и РЛЭ в целом:
o Соблюдение ограничений по скорости, скоростному напору
и числу М.
o Соблюдение ограничений по углу атаки.
o Соблюдение ограничений по перегрузке ny и nz,
80
81. Требования к динамической устойчивости
Устойчивость и управляемость самолётаТребования к динамической устойчивости
Раскачка самолёта лётчиком
Наиболее вероятна при точном пилотировании.
Причины, способствующие раскачке:
1. Неудовлетворительные характеристики динамики самолёта:
• Малый период собственных колебаний самолёта (≤ 1с);
• Малые величины Хвn и Рвn, малый градиент изменения усилия по ходу (слишком
чувствительное управление);
• Плохое затухание колебаний, малый коэффициент относительного демпфирования
< 0.15;
2. Плохая работа системы автоматического управления:
• Большое запаздывание в системе дистанционного управления;
• Большое трение в проводке механической системы управления;
• Неверная настройка коэффициента по угловой скорости (демпфирование);
• Неверная настройка коэффициента по перегрузке (улучшение устойчивости);
Действия лётчика для предотвращения и прекращения раскачки:
• Если на экспериментальном режиме возможна раскачка, сбалансировать РУС по
усилиям на заданном исходном режиме, при начале раскачки установить рычаг в
сбалансированное положение и зафиксировать;
• Если раскачка появилась с изменением (ростом) скорости – уменьшить скорость
полёта, если при увеличении угла атаки – уменьшить угол атаки, и т.д.;
• Управлять как можно плавнее, не вызывать значительных переходных процессов
(колебаний);
81