




















































 Электроника
Электроника Военное дело
Военное делоПохожие презентации:




: история, понятие, назначение, функции")
")
")



Основные типы беспилотных летательных аппаратов
1.
Основные типы беспилотныхлетательных аппаратов:
Мультироторные дроны;
Беспилотник с неподвижным крылом
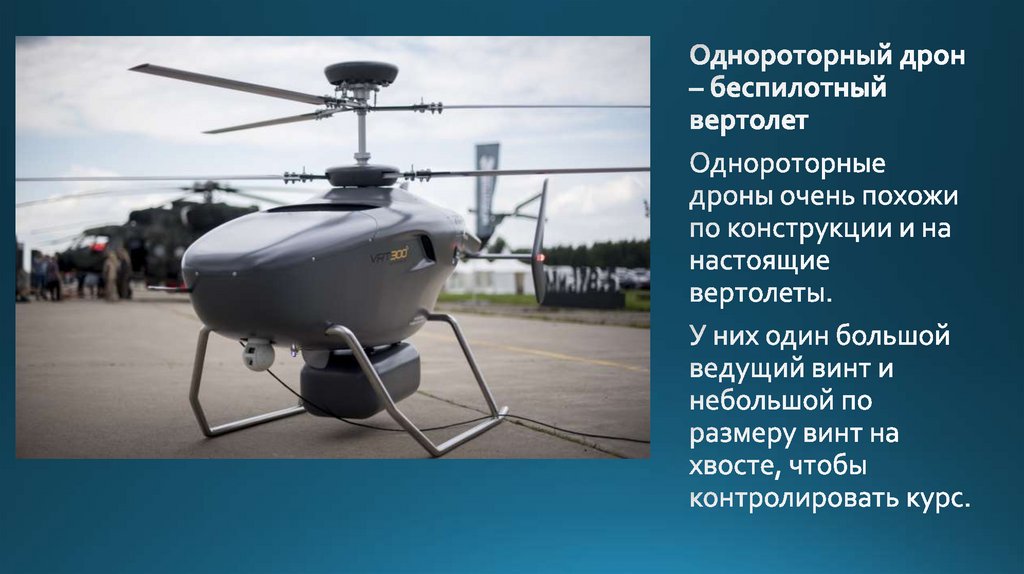
Однороторный дроны
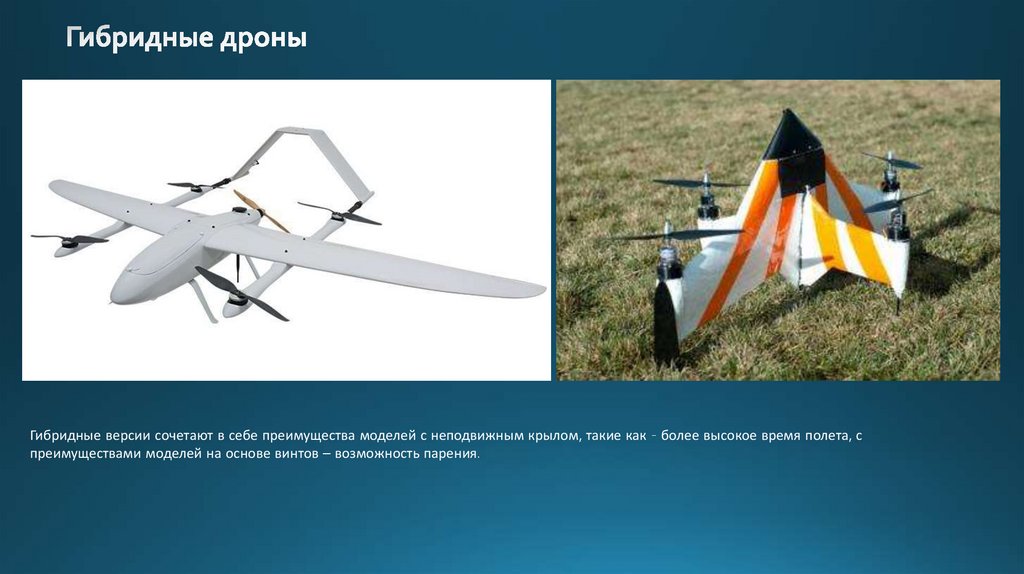
Гибридные дроны.
2.
3.
Трикоптеры – аппараты с тремя пропеллерами, отличаются небольшим весом ивысокой маневренностью;
4.
Квадрокоптеры – оснащены четырьмя пропеллерами, благодаря чему надежно и стабильнодержатся в воздухе, составляют самый многочисленный и популярный класс;
5.
Гексакоптеры – имеют шесть пропеллеров, характеризуются высокой грузоподъемностью и меньшим,чем в квадрокоптерах, уровнем вибрации, что актуально для видеосъемки;
6.
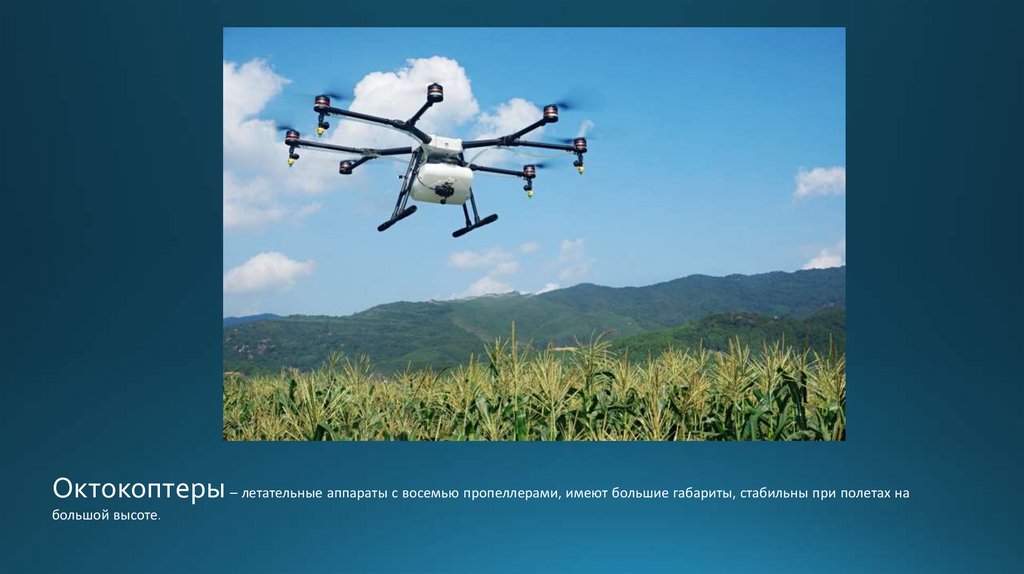
Октокоптеры – летательные аппараты с восемью пропеллерами, имеют большие габариты, стабильны при полетах набольшой высоте.
7.
Беспилотники с неподвижным крылом8.
Геоскан 2019.
10.
Геоскан 70111.
12.
Гибридные версии сочетают в себе преимущества моделей с неподвижным крылом, такие как - более высокое время полета, спреимуществами моделей на основе винтов – возможность парения.
13.
Беспилотный конвертоплан14.
15.
16.
17.
18.
19.
20.
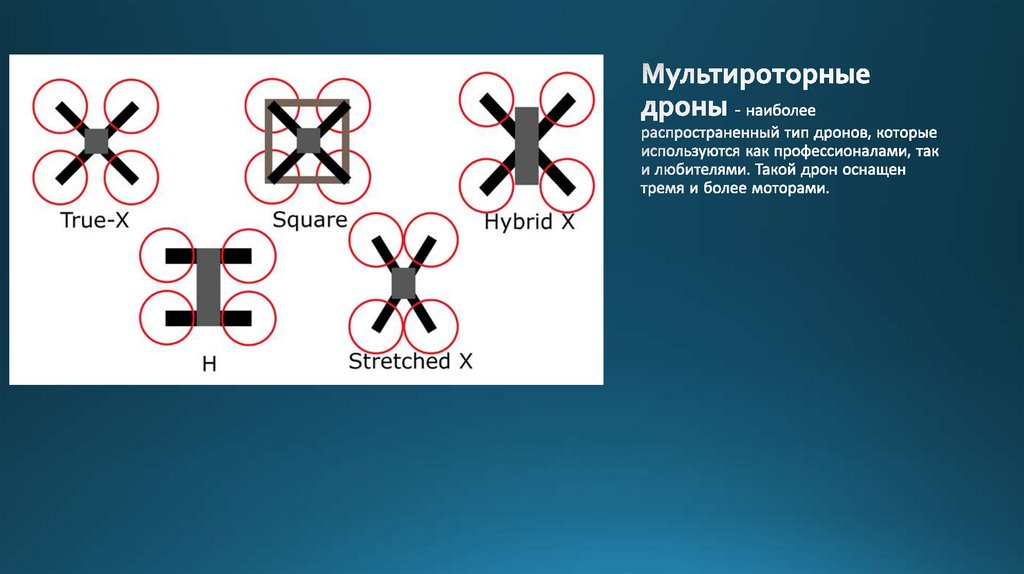
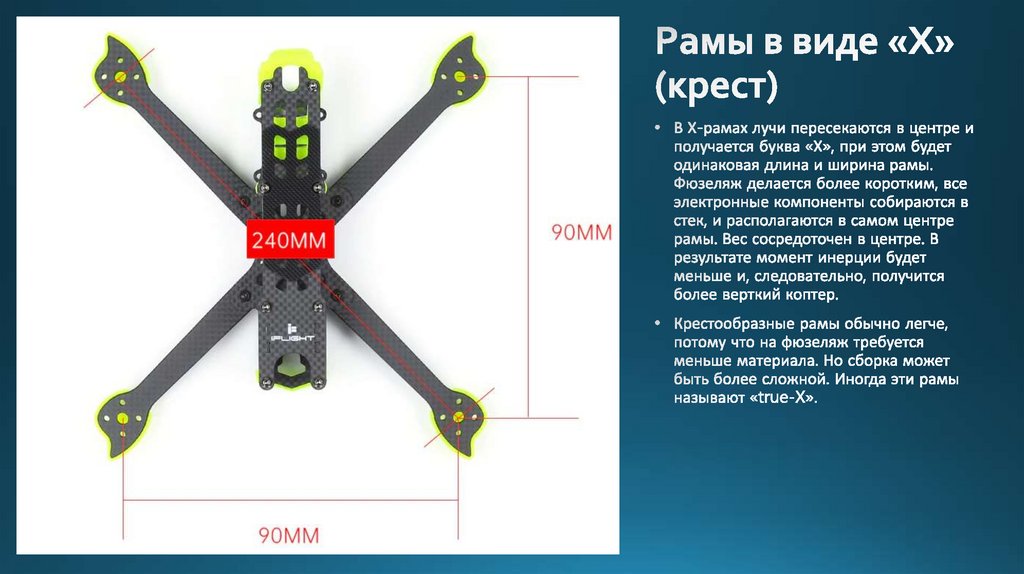
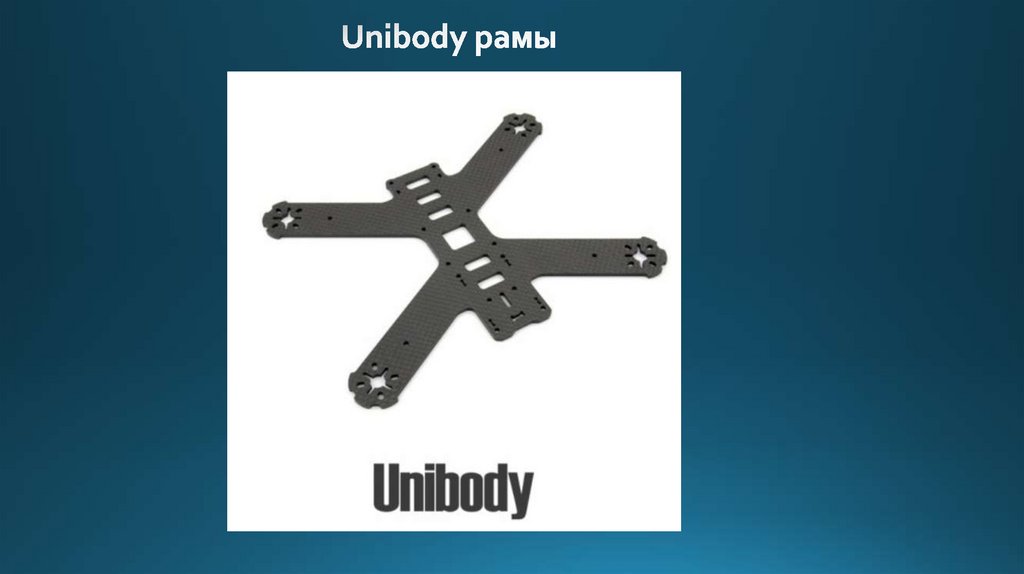
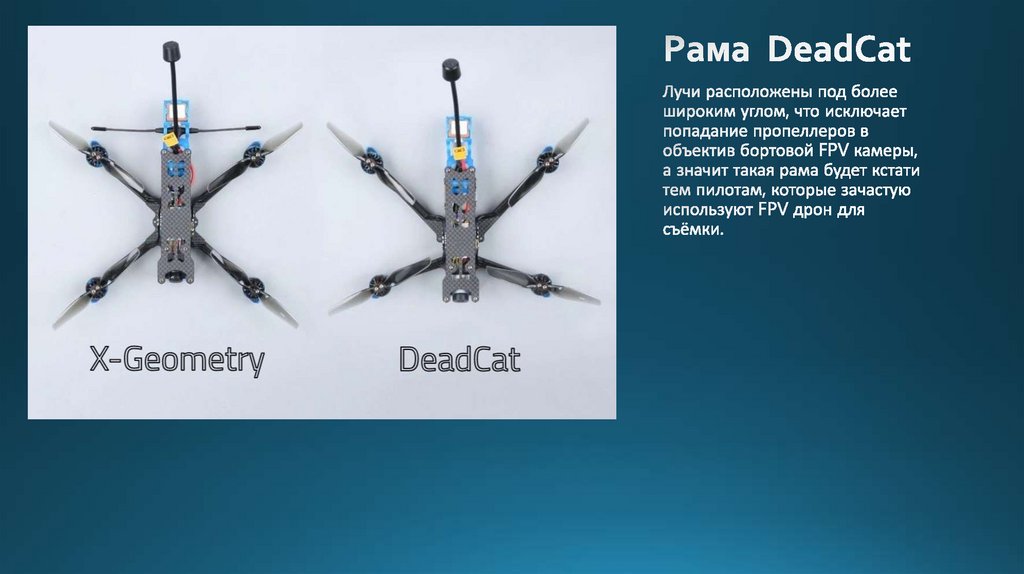
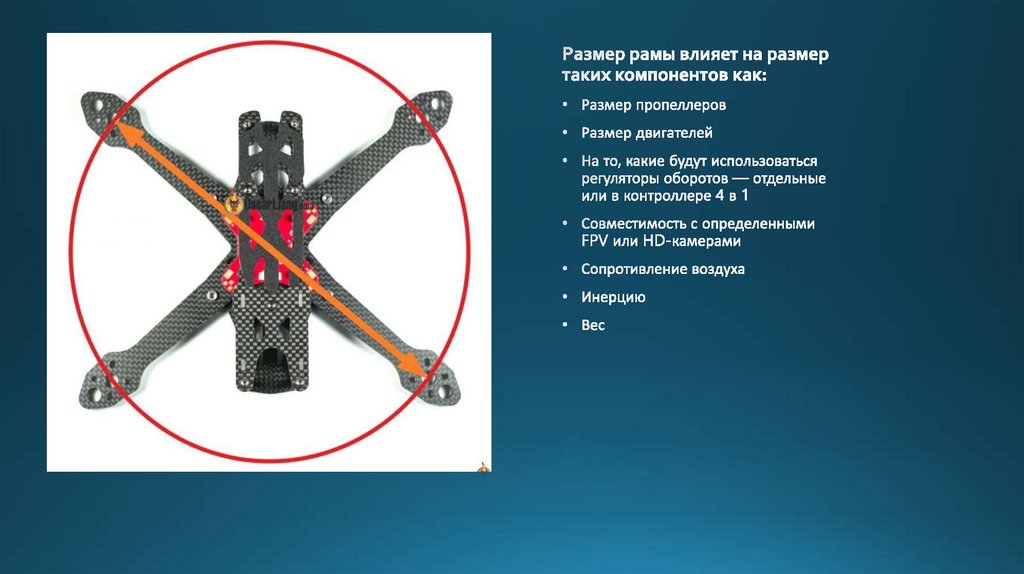
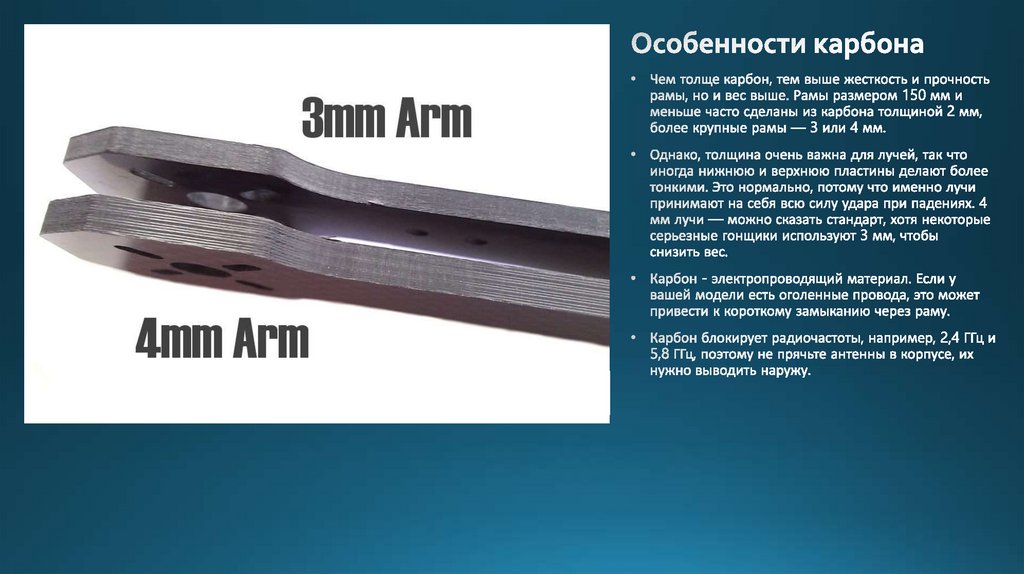
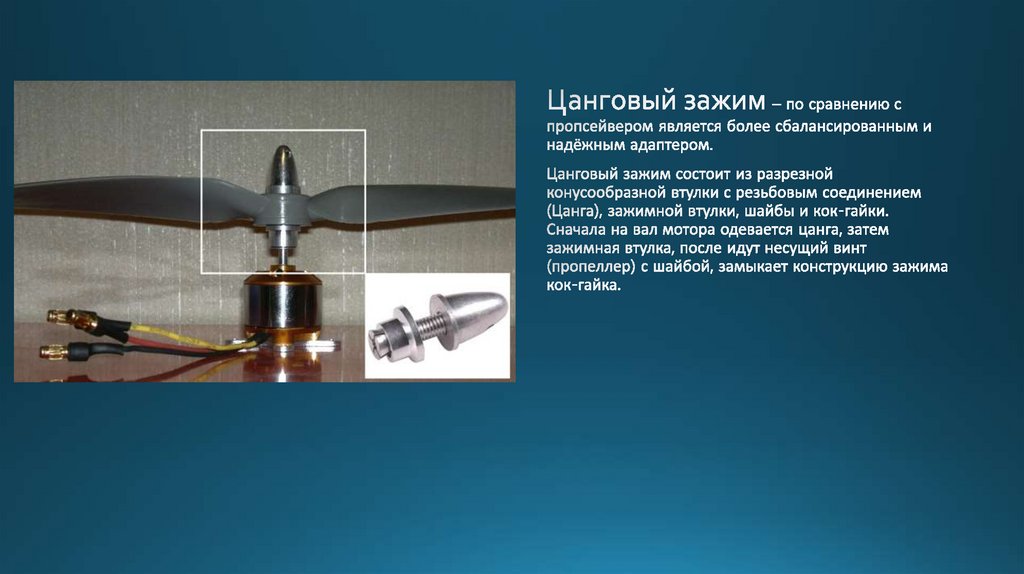
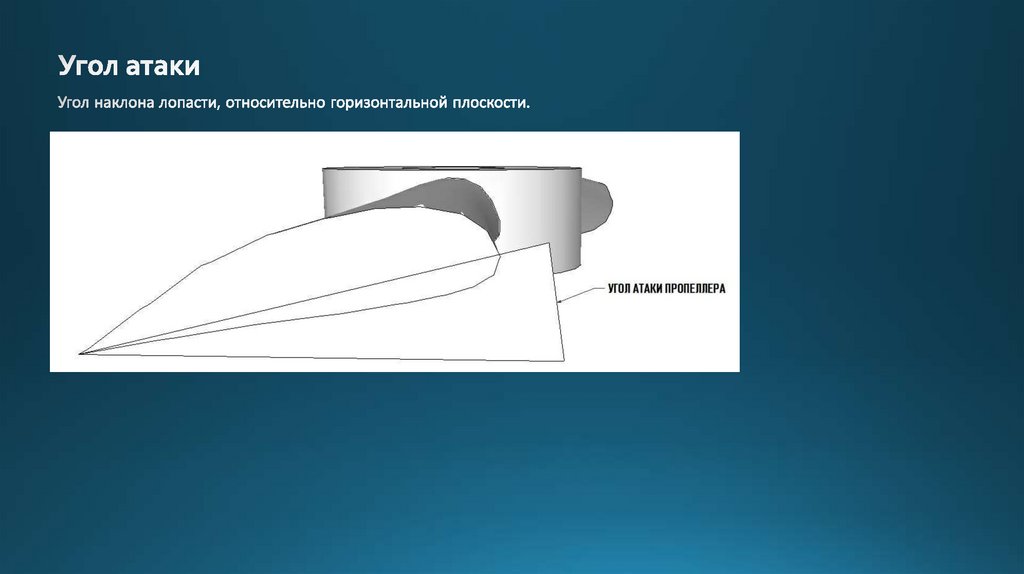
21. Форма рамы
22.
23.
24.
25.
26.
27.
28.
29.
30.
31.
32.
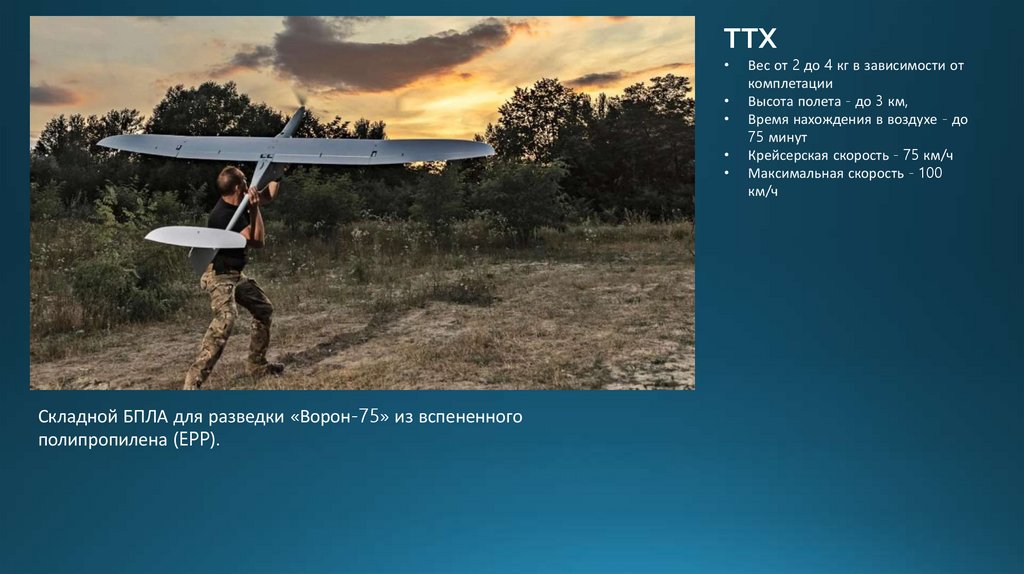
ТТХСкладной БПЛА для разведки «Ворон-75» из вспененного
полипропилена (EPP).
Вес от 2 до 4 кг в зависимости от
комплетации
Высота полета - до 3 км,
Время нахождения в воздухе - до
75 минут
Крейсерская скорость - 75 км/ч
Максимальная скорость - 100
км/ч
33.
34.
35.
36.
37.
38.
39.
40.
41.
42.
43.
44.
45.
46.
Коллекторный двигатель состоит из:Якорь - металлический вал, являющийся стержнем всей конструкции. Вал
является движущимся элементом, от которого зависит крутящий момент. На нём
также располагается ротор.
Ротор - связан с ведущим валом. Внешняя конструкция вращается внутри
статора. Задача ротора получать или отдавать напряжение рабочему телу.
Подшипники - расположены на противоположных концах якоря для его
сбалансированного вращения.
Щётки - типичным материалом для изготовления щёток является графит. Задача
щёток предавать напряжение через коллектор в обмотки.
Коллектор (коммутатор) - выполнен в виде соединенных между собой
медных контактов. Во время процесса вращения он принимает на себя энергию со
щёток и направляет её в обмотки.
Обмотки - расположены на роторе и статоре разных полярностей.
Предназначены для генерации собственного магнитного поля под воздействием
разных полярностей, за счёт чего якорь приходит в действие.
Сердечник статора - выполнен из металлических пластин. Может иметь
катушку возбуждения с полярным напряжением обмотки ротора или постоянные
магниты. Данная конструкция зависит от источника напряжения. Является
статичным элементом всего механизма.
47.
48.
49.
50.
51.
52.
53.
54.
55.
56.
57.
58.
59.
60.
61.
62.
63.
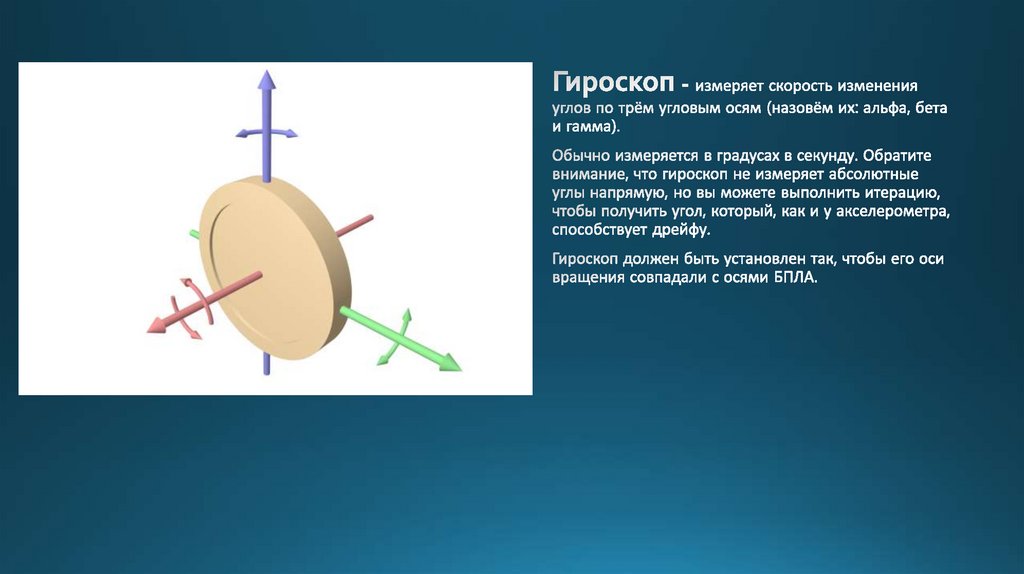
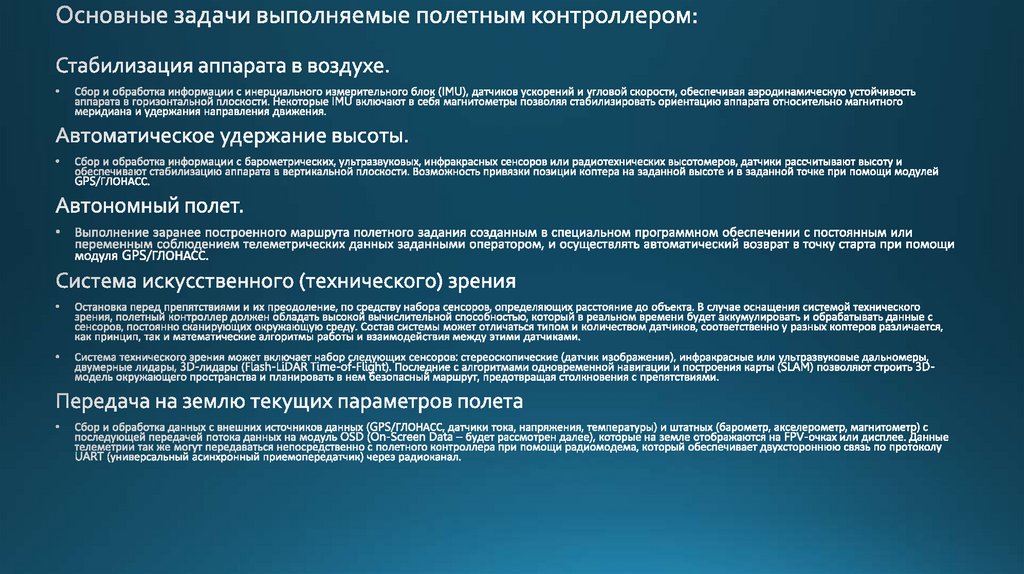
СенсорыС точки зрения аппаратного обеспечения,
контроллер полёта по сути является обычным
программируемым микроконтроллером,
только со специальными датчиками на борту.
Как минимум, контроллер полёта будет
включать в себя 3-осевой гироскоп, но без
автовыравнивания. Не все контроллеры
полёта оснащаются указанными ниже
сенсорами, но они также могут включать их
комбинацию:
64.
65.
66.
67.
68.
69.
70.
71.
72.
73.
74.
75.
76.
77.
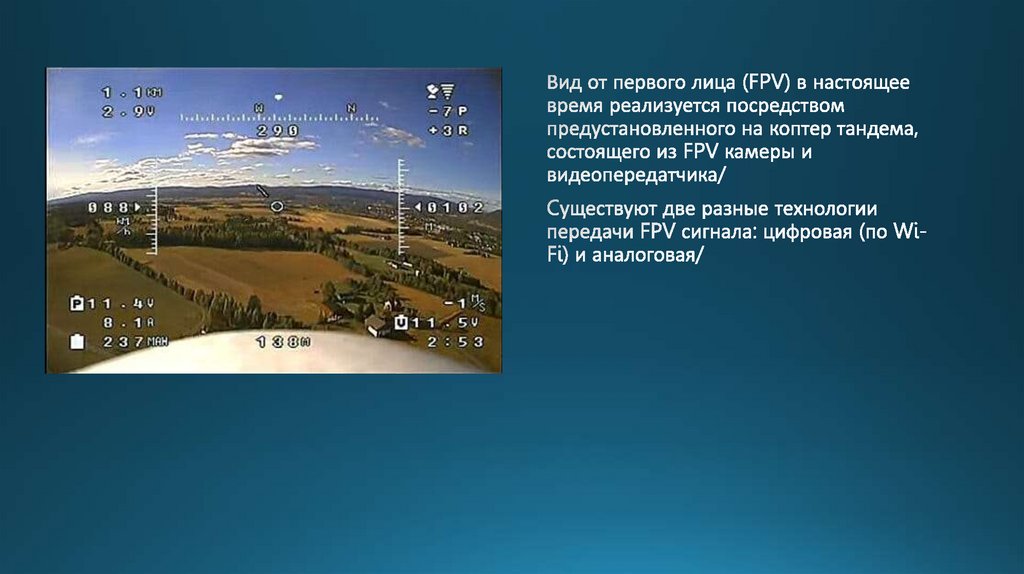
В итоге получается:Аналоговое FPV на 2.4ГГц устаревшая технология, практически не используется
Wi-Fi FPV на 2.4ГГц новая бюджетная технология, но картинка транслируется с существенной задержкой
Wi-Fi FPV на 5ГГц (5G Wi-Fi) новая бюджетная технология, картинка транслируется с меньшей задержкой по
сравнению с Wi-Fi FPV 2.4ГГц, в лучшем качестве и большей дальностью. Лучший вариант для коптеров начального
уровня (для игрушек).
Аналоговое FPV на 5.8ГГц лучшая из трех, выбор профессионалов и любителей.