
Похожие презентации:






")



глава 7
1.
ГЛАВА 7. ДИНАМИЧЕСКИЕПОГРЕШНОСТИ ИЗМЕРЕНИЙ
ТЕМА 1. ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКОЙ
ПОГРЕШНОСТИ ИЗМЕРЕНИЙ.
2.
ГЛАВА 7. ДИНАМИЧЕСКИЕ ПОГРЕШНОСТИ ИЗМЕРЕНИЙОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКОЙ ПОГРЕШНОСТИ ИЗМЕРЕНИЙ.
y t yст ,
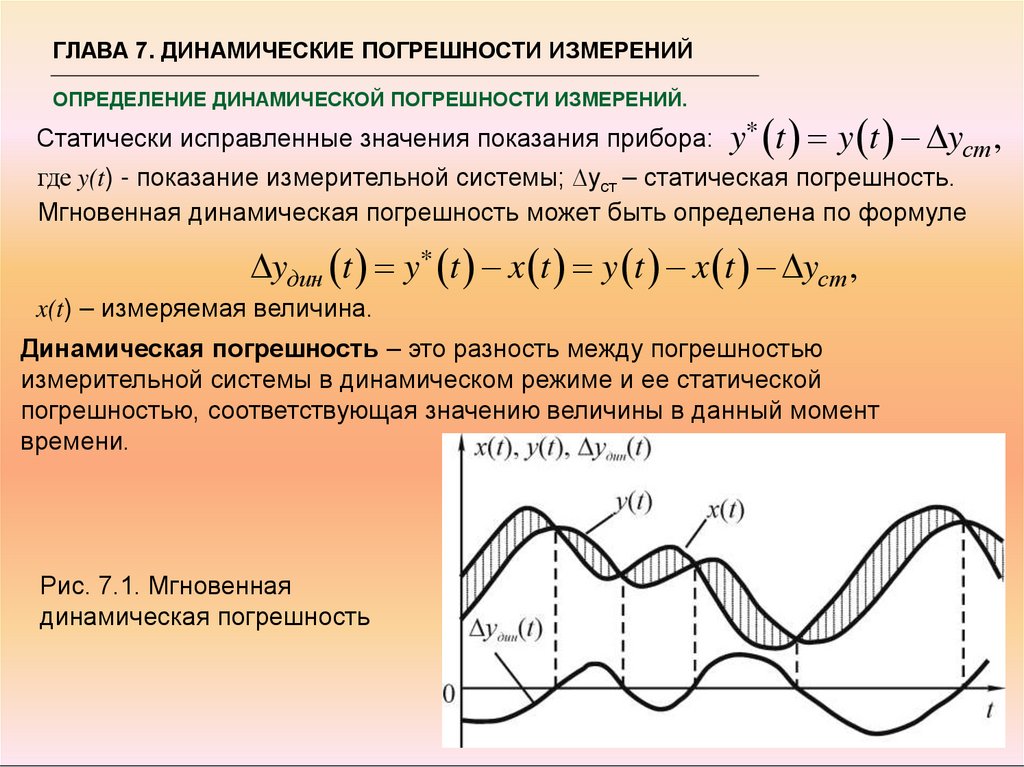
Статически исправленные значения показания прибора: y* t
где y(t) - показание измерительной системы; ∆yст – статическая погрешность.
Мгновенная динамическая погрешность может быть определена по формуле
yдин t y* t x t y t x t yст ,
x(t) – измеряемая величина.
Динамическая погрешность – это разность между погрешностью
измерительной системы в динамическом режиме и ее статической
погрешностью, соответствующая значению величины в данный момент
времени.
Рис. 7.1. Мгновенная
динамическая погрешность
3.
ГЛАВА 7. ДИНАМИЧЕСКИЕ ПОГРЕШНОСТИ ИЗМЕРЕНИЙОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКОЙ ПОГРЕШНОСТИ ИЗМЕРЕНИЙ.
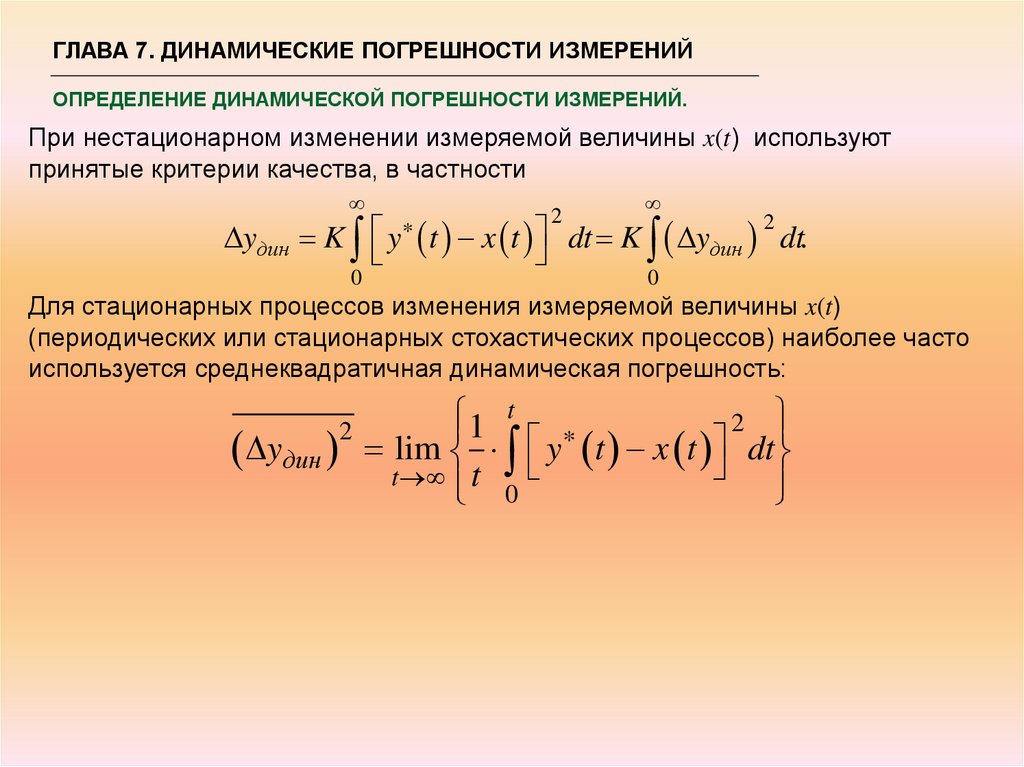
При нестационарном изменении измеряемой величины x(t) используют
принятые критерии качества, в частности
2
2
yдин K y* t x t dt K yдин dt.
0
0
Для стационарных процессов изменения измеряемой величины x(t)
(периодических или стационарных стохастических процессов) наиболее часто
используется среднеквадратичная динамическая погрешность:
t
2
1
2
*
y
lim
y
t
x
t
dt
дин
t t
0
4.
ГЛАВА 7. ДИНАМИЧЕСКИЕПОГРЕШНОСТИ ИЗМЕРЕНИЙ
ТЕМА 2. РАСЧЕТ ДИНАМИЧЕСКИХ
ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЯ.
5.
ГЛАВА 7. ДИНАМИЧЕСКИЕ ПОГРЕШНОСТИ ИЗМЕРЕНИЙРАСЧЕТ ДИНАМИЧЕСКИХ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЯ.
Выражения для динамической погрешности измерения детерминированных
сигналов
*
y p
yдин p x p
1 x p W p 1 ,
x p
x p
1
*
*
yдин p y p 1
y p 1
.
*
y p
W p
Формулы для расчета динамической погрешности измерений во временной
области
yдин t L 1 x p W p 1 ,
1
1 *
yдин t L y p 1
.
W p
6.
ГЛАВА 7. ДИНАМИЧЕСКИЕ ПОГРЕШНОСТИ ИЗМЕРЕНИЙРАСЧЕТ ДИНАМИЧЕСКИХ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЯ.
Единичная функция
0 при t 0;
x t t
1 при t 0.
В частотной области x(p)=1/p, а динамическая погрешность измерений
определяется формулой
1
yдин p W p 1 .
p
Для временной области
1 W p 1
yдин t L W p 1 L
p
p
p
1 1
Осуществляя почленно обратное преобразование Лапласа, получим
yдин t t t ,
где γ(t)– переходная функция измерительной системы
7.
ГЛАВА 7. ДИНАМИЧЕСКИЕ ПОГРЕШНОСТИ ИЗМЕРЕНИЙРАСЧЕТ ДИНАМИЧЕСКИХ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЯ.
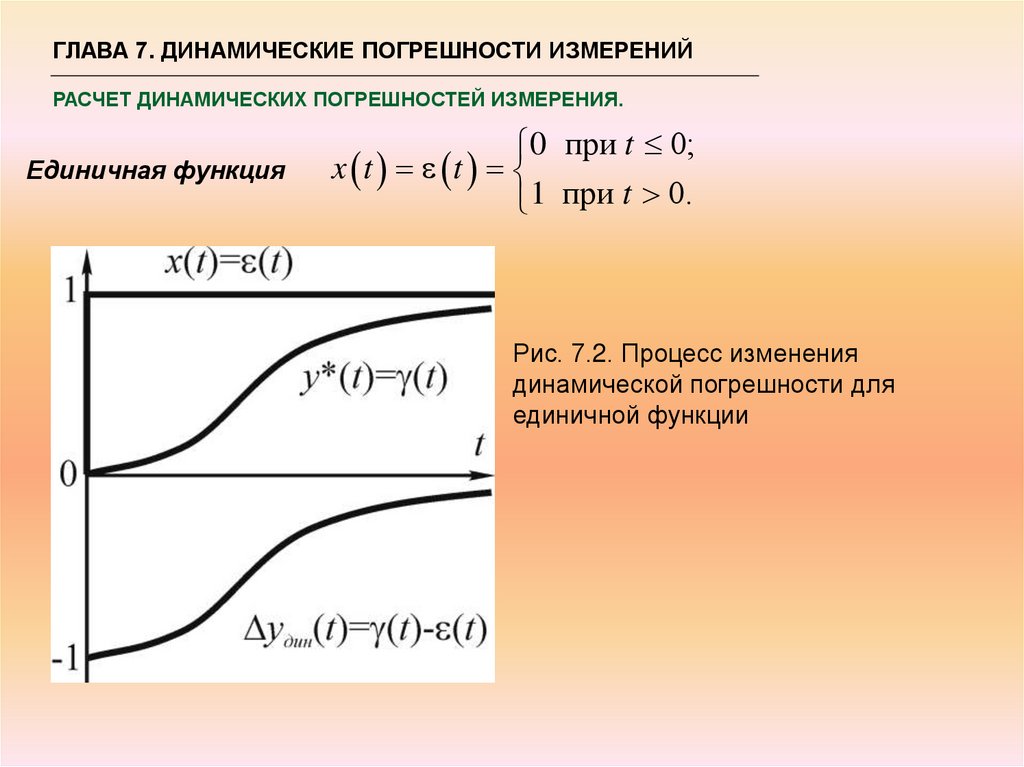
Единичная функция
0 при t 0;
x t t
1 при t 0.
Рис. 7.2. Процесс изменения
динамической погрешности для
единичной функции
8.
ГЛАВА 7. ДИНАМИЧЕСКИЕ ПОГРЕШНОСТИ ИЗМЕРЕНИЙРАСЧЕТ ДИНАМИЧЕСКИХ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЯ.
Гармонические колебания
x t cos t
Входной x(t) и выходной y*(t) сигналы могут быть разложены в ряды Фурье:
x t cos n 0t n .
В комплексной форме эти колебания запишутся в следующем виде:
x t Re exp i n 0t n
(7.1)
С помощью формулы (7.1) можно получить спектральное распределение
погрешности динамических измерений для гармонического входного сигнала:
yдин Axn W in 0 1 exp i n 0 xn
n
или
1
yдин Ayn 1
exp i n 0 yn
n
W in 0
9.
ГЛАВА 7. ДИНАМИЧЕСКИЕ ПОГРЕШНОСТИ ИЗМЕРЕНИЙРАСЧЕТ ДИНАМИЧЕСКИХ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЯ.
x t cos t
Гармонические колебания
По спектральному распределению погрешности можно рассчитать
среднеквадратичную динамическую погрешность измерений по формулам:
2
1 2
yдин Axn W in 0 1 ,
2 n
2
yдин 2
1
1
2
A
1
yn W in
2 n
0
2
10.
ГЛАВА 7. ДИНАМИЧЕСКИЕ ПОГРЕШНОСТИ ИЗМЕРЕНИЙРАСЧЕТ ДИНАМИЧЕСКИХ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЯ.
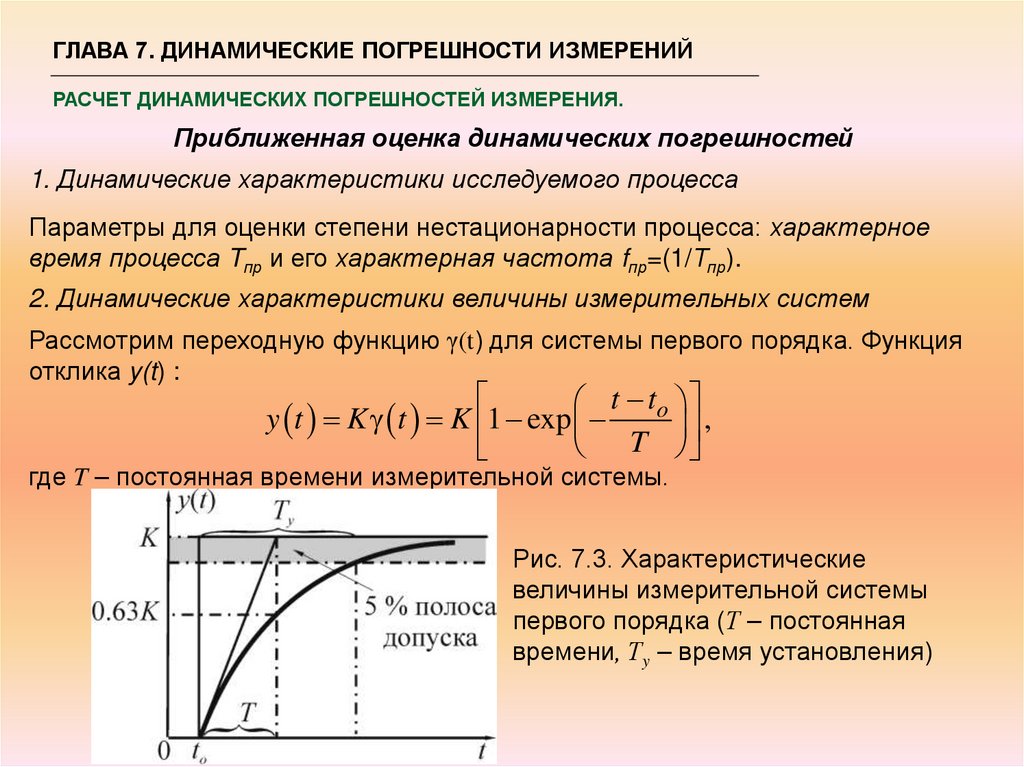
Приближенная оценка динамических погрешностей
1. Динамические характеристики исследуемого процесса
Параметры для оценки степени нестационарности процесса: характерное
время процесса Tпр и его характерная частота fпр=(1/Тпр).
2. Динамические характеристики величины измерительных систем
Рассмотрим переходную функцию γ(t) для системы первого порядка. Функция
отклика y(t) :
t to
y t K t K 1 exp
,
T
где T – постоянная времени измерительной системы.
Рис. 7.3. Характеристические
величины измерительной системы
первого порядка (Т – постоянная
времени, Тy – время установления)
11.
ГЛАВА 7. ДИНАМИЧЕСКИЕ ПОГРЕШНОСТИ ИЗМЕРЕНИЙРАСЧЕТ ДИНАМИЧЕСКИХ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЯ.
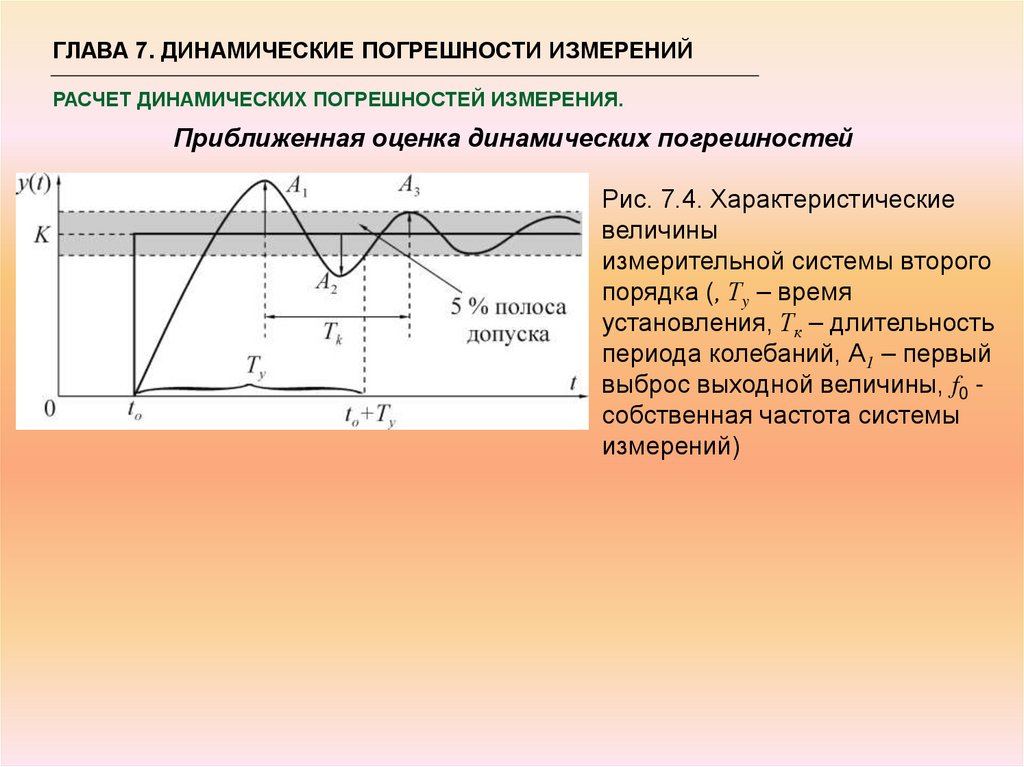
Приближенная оценка динамических погрешностей
Рис. 7.4. Характеристические
величины
измерительной системы второго
порядка (, Тy – время
установления, Тк – длительность
периода колебаний, А1 – первый
выброс выходной величины, f0 собственная частота системы
измерений)
12.
ГЛАВА 7. ДИНАМИЧЕСКИЕ ПОГРЕШНОСТИ ИЗМЕРЕНИЙРАСЧЕТ ДИНАМИЧЕСКИХ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЯ.
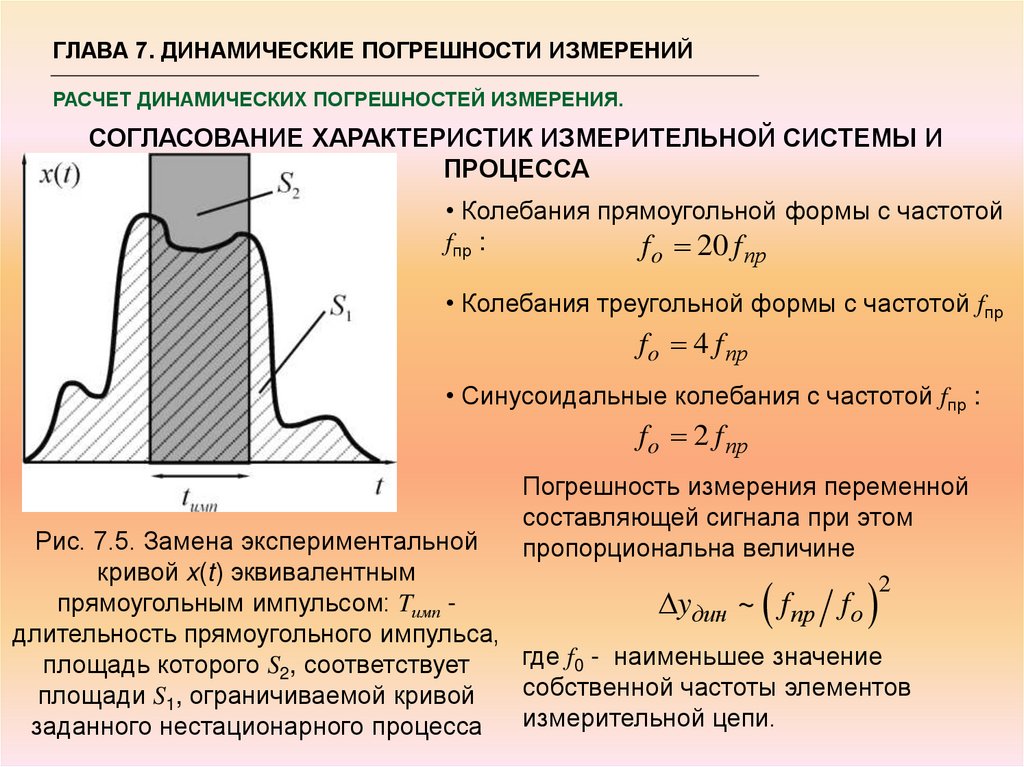
СОГЛАСОВАНИЕ ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ И
ПРОЦЕССА
• Колебания прямоугольной формы с частотой
fпр :
fo 20 f пр
• Колебания треугольной формы с частотой fпр
fo 4 f пр
• Синусоидальные колебания с частотой fпр :
fo 2 f пр
Погрешность измерения переменной
составляющей сигнала при этом
пропорциональна величине
Рис. 7.5. Замена экспериментальной
кривой x(t) эквивалентным
2
прямоугольным импульсом: Tимп yдин ~ f пр fo
длительность прямоугольного импульса,
где f0 - наименьшее значение
площадь которого S2, соответствует
собственной частоты элементов
площади S1, ограничиваемой кривой
измерительной цепи.
заданного нестационарного процесса
13.
ГЛАВА 7. ДИНАМИЧЕСКИЕПОГРЕШНОСТИ ИЗМЕРЕНИЙ
ТЕМА 3. ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ
НЕКОТОРЫХ СРЕДСТВ ИЗМЕРЕНИЯ.
14.
ГЛАВА 7. ДИНАМИЧЕСКИЕ ПОГРЕШНОСТИ ИЗМЕРЕНИЙДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ НЕКОТОРЫХ СРЕДСТВ ИЗМЕРЕНИЯ.
Системы измерения давления
Для измерения динамических давлений используются первичные
fo
преобразователи
(датчики) различных типов:
– пьезоэлектрические,
– тензометрические,
– пьезорезистивные, и др
15.
ГЛАВА 7. ДИНАМИЧЕСКИЕ ПОГРЕШНОСТИ ИЗМЕРЕНИЙДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ НЕКОТОРЫХ СРЕДСТВ ИЗМЕРЕНИЯ.
Системы измерения давления
Марка
Тип
Диапазон,
Собственна
МПа
я частота , кГц
Относительная
погрешность, %
Тензометрический
6; 8; 10;
15; 25; 40; 60
15
0.8
Тензометрический
0.5; 1; 1.5;
2; 3; 4;
5
0.8
ЛХ-418
Тензометрический
6; 8; 10;
15; 25; 40; 60
5
0.8
ИС-401
Тензметрический
6; 8; 10
10
1.2
ЛХ-600
Пьезоэлектрический
5
30
10
ЛХ-606
Пьезоэлектрический
3
100
10
ЛХ-611
Пьезоэлектрический
5
200
15
ЛХ-412
ЛХ-415
16.
ГЛАВА 7. ДИНАМИЧЕСКИЕ ПОГРЕШНОСТИ ИЗМЕРЕНИЙДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ НЕКОТОРЫХ СРЕДСТВ ИЗМЕРЕНИЯ.
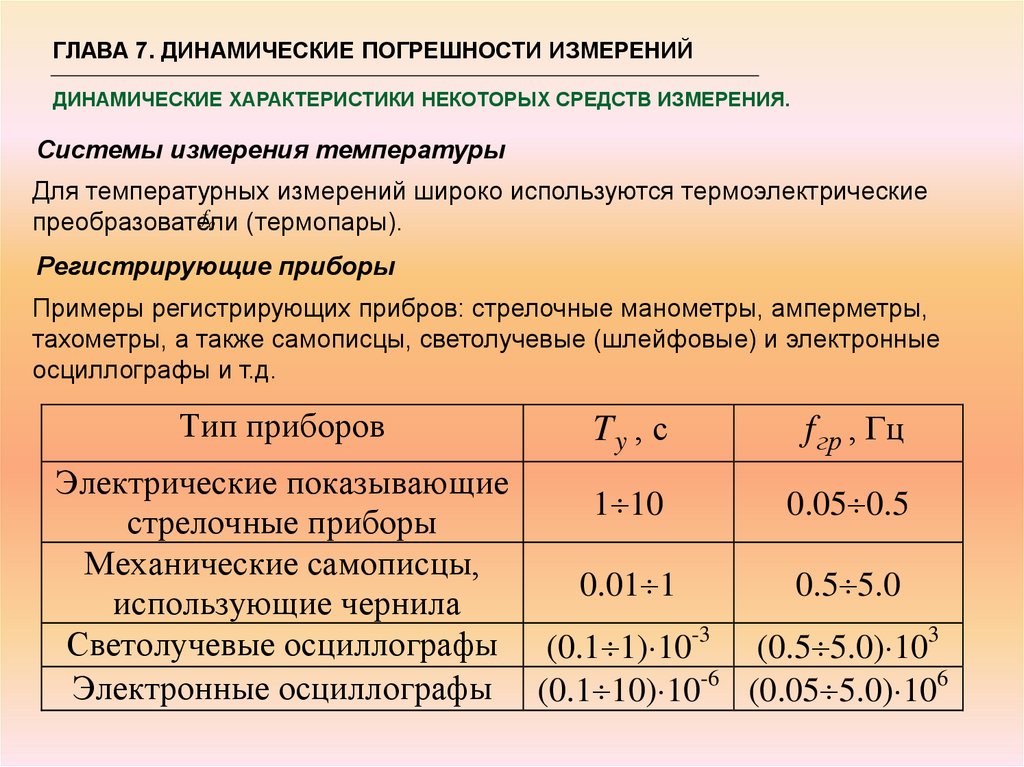
Системы измерения температуры
Для температурных измерений широко используются термоэлектрические
fo
преобразователи
(термопары).
Регистрирующие приборы
Примеры регистрирующих прибров: стрелочные манометры, амперметры,
тахометры, а также самописцы, светолучевые (шлейфовые) и электронные
осциллографы и т.д.
Тип приборов
Ty , с
f гр , Гц
Электрические показывающие
1 10
0.05 0.5
стрелочные приборы
Механические самописцы,
0.01 1
0.5 5.0
использующие чернила
Светолучевые осциллографы (0.1 1) 10-3 (0.5 5.0) 103
Электронные осциллографы (0.1 10) 10-6 (0.05 5.0) 106