



 Информатика
ИнформатикаПохожие презентации:





")




Цифровая обработка сигналов
1. Цифровая обработка сигналов
2.
Основные компоненты микропроцессорнойсистемы управления
3.
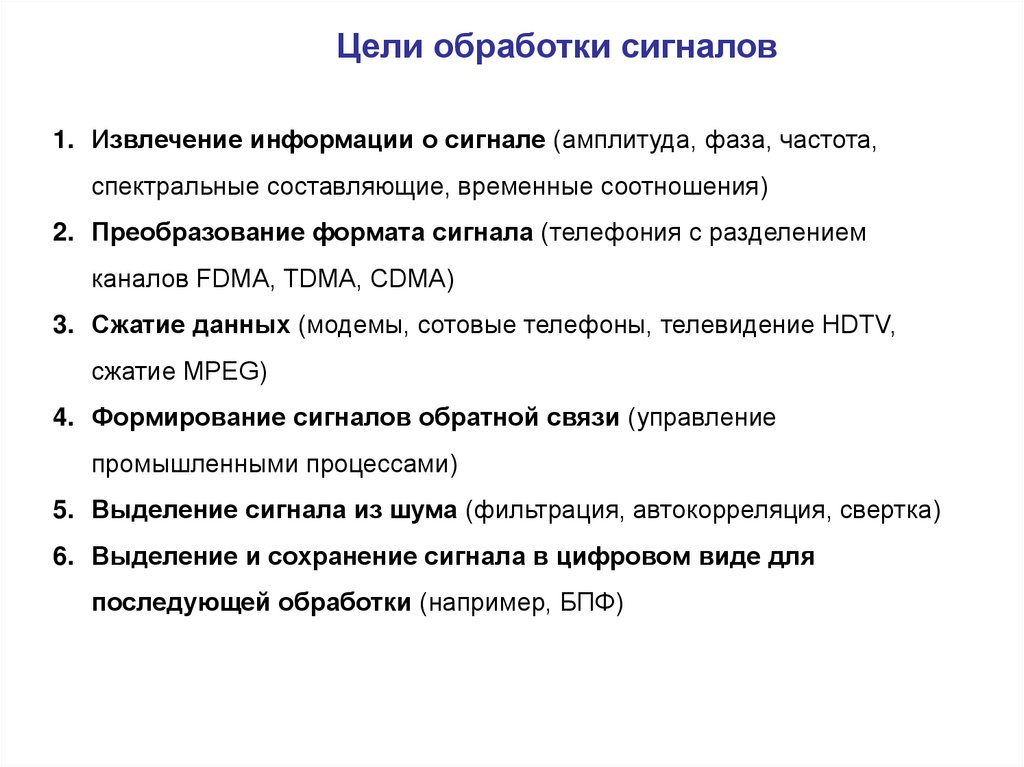
Цели обработки сигналов1. Извлечение информации о сигнале (амплитуда, фаза, частота,
спектральные составляющие, временные соотношения)
2. Преобразование формата сигнала (телефония с разделением
каналов FDMA, TDMA, CDMA)
3. Сжатие данных (модемы, сотовые телефоны, телевидение HDTV,
сжатие MPEG)
4. Формирование сигналов обратной связи (управление
промышленными процессами)
5. Выделение сигнала из шума (фильтрация, автокорреляция, свертка)
6. Выделение и сохранение сигнала в цифровом виде для
последующей обработки (например, БПФ)
4.
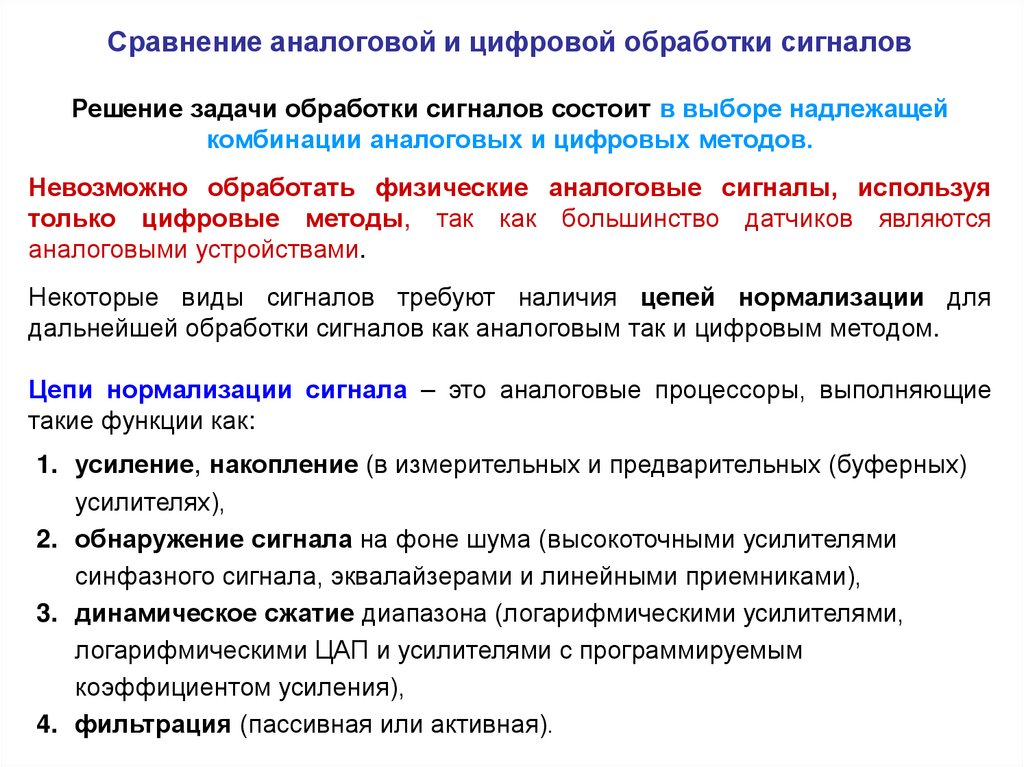
Сравнение аналоговой и цифровой обработки сигналовРешение задачи обработки сигналов состоит в выборе надлежащей
комбинации аналоговых и цифровых методов.
Невозможно обработать физические аналоговые сигналы, используя
только цифровые методы, так как большинство датчиков являются
аналоговыми устройствами.
Некоторые виды сигналов требуют наличия цепей нормализации для
дальнейшей обработки сигналов как аналоговым так и цифровым методом.
Цепи нормализации сигнала – это аналоговые процессоры, выполняющие
такие функции как:
1. усиление, накопление (в измерительных и предварительных (буферных)
усилителях),
2. обнаружение сигнала на фоне шума (высокоточными усилителями
синфазного сигнала, эквалайзерами и линейными приемниками),
3. динамическое сжатие диапазона (логарифмическими усилителями,
логарифмическими ЦАП и усилителями с программируемым
коэффициентом усиления),
4. фильтрация (пассивная или активная).
5.
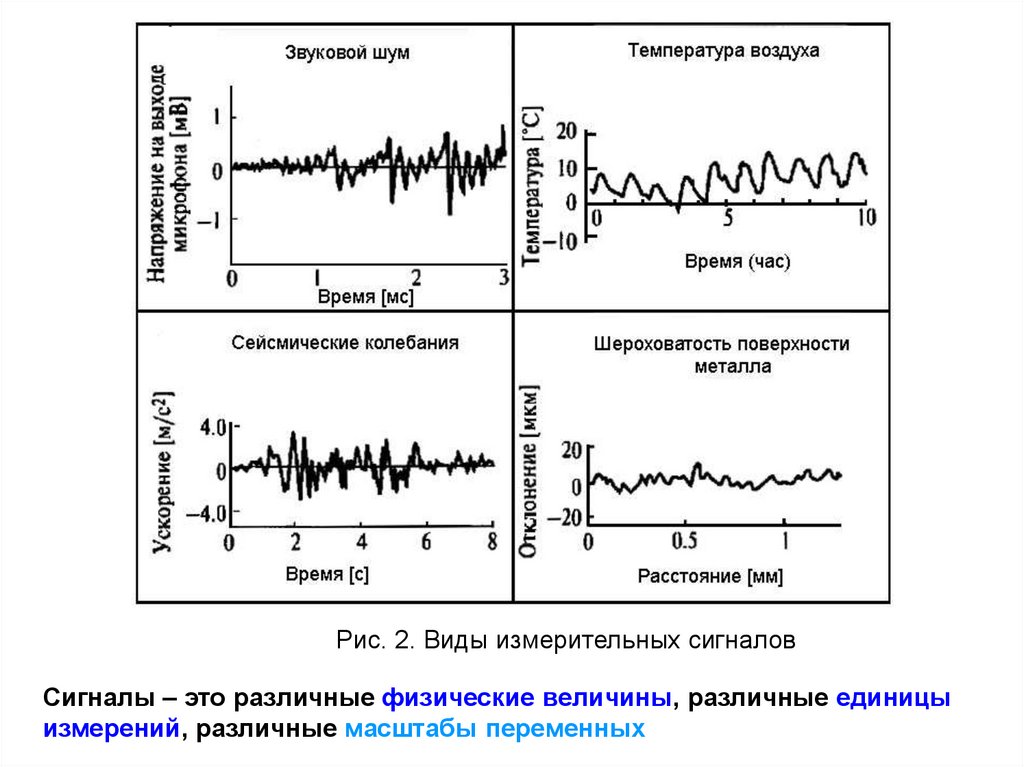
Рис. 2. Виды измерительных сигналовСигналы – это различные физические величины, различные единицы
измерений, различные масштабы переменных
6.
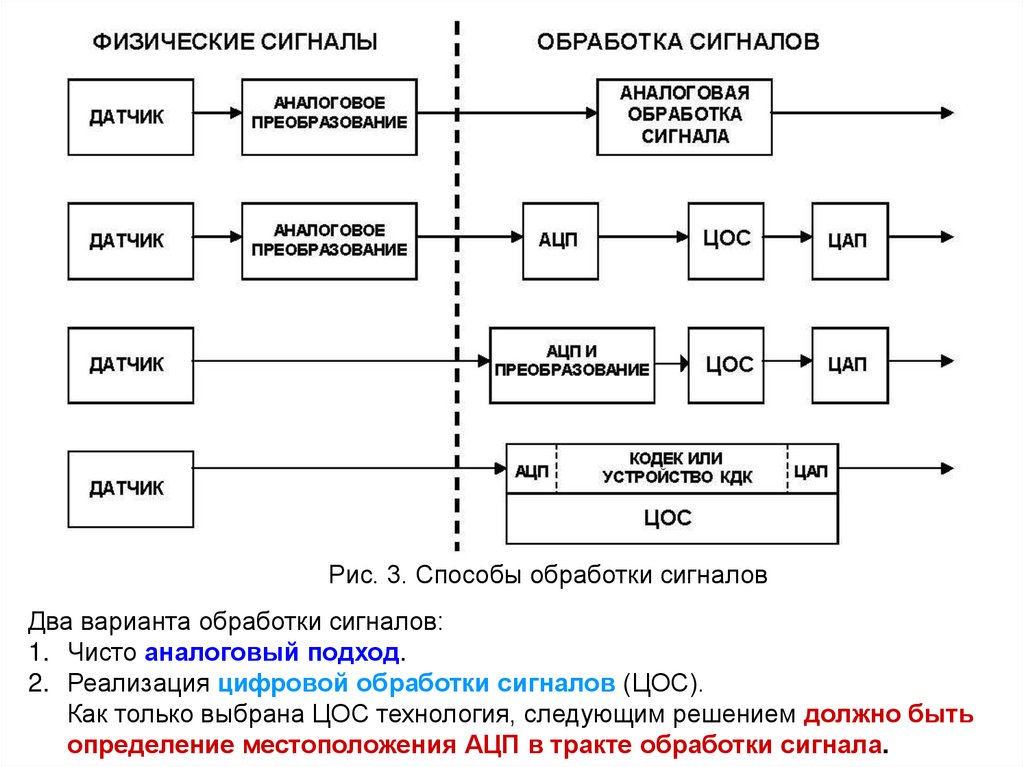
Рис. 3. Способы обработки сигналовДва варианта обработки сигналов:
1. Чисто аналоговый подход.
2. Реализация цифровой обработки сигналов (ЦОС).
Как только выбрана ЦОС технология, следующим решением должно быть
определение местоположения АЦП в тракте обработки сигнала.
7.
Дискретизациясигнала в АЦП
(с интегрированным
устройством выборкихранения УВХ),
независимо от
архитектуры, проходит
при наличии шумов и
искажений сигнала
Широкополосному аналоговому входному буферу присущи шум,
нелинейность и конечная (ограниченная) ширина полосы пропускания.
1. УВХ вносит дальнейшую нелинейность, ограничение полосы и дрожание
апертуры.
2. Квантующая часть АЦП вносит шум квантования, интегральную и
дифференциальную
нелинейности.
Предполагается,
что
сигналы
с
последовательных выходов АЦП загружаются в буферную память длиной М.
3. Допускается, что арифметические операции БПФ не вносят никаких существенных
погрешностей в АЦП.
8.
9.
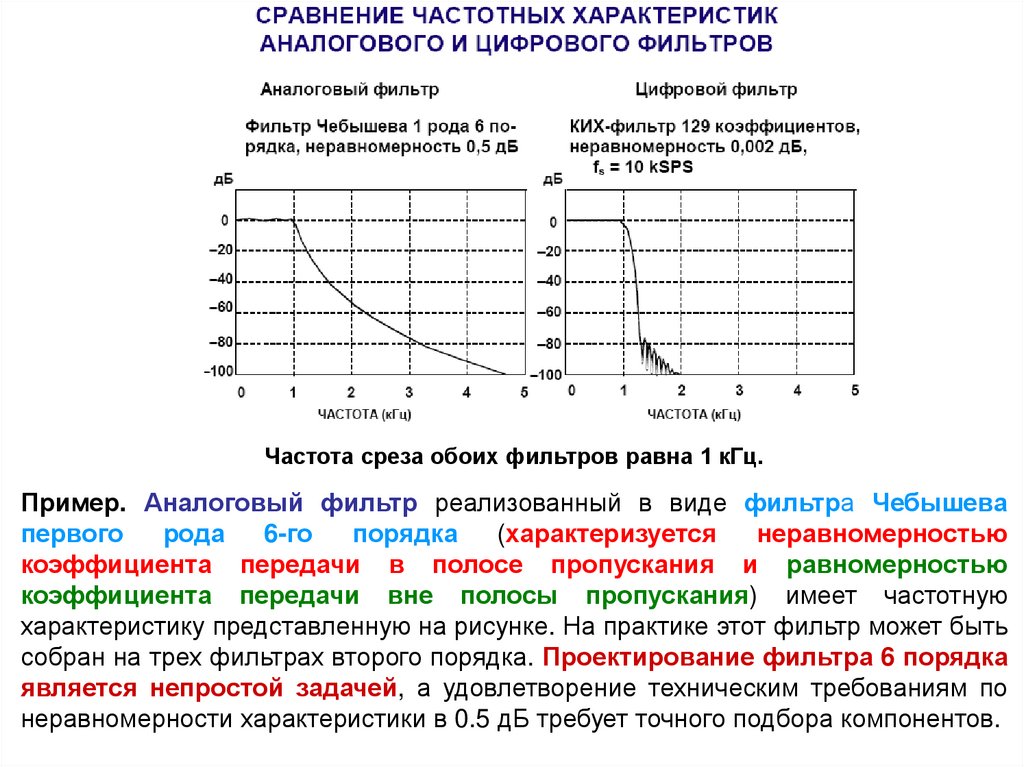
Частота среза обоих фильтров равна 1 кГц.Пример. Аналоговый фильтр реализованный в виде фильтра Чебышева
первого
рода
6-го
порядка
(характеризуется
неравномерностью
коэффициента передачи в полосе пропускания и равномерностью
коэффициента передачи вне полосы пропускания) имеет частотную
характеристику представленную на рисунке. На практике этот фильтр может быть
собран на трех фильтрах второго порядка. Проектирование фильтра 6 порядка
является непростой задачей, а удовлетворение техническим требованиям по
неравномерности характеристики в 0.5 дБ требует точного подбора компонентов.
10.
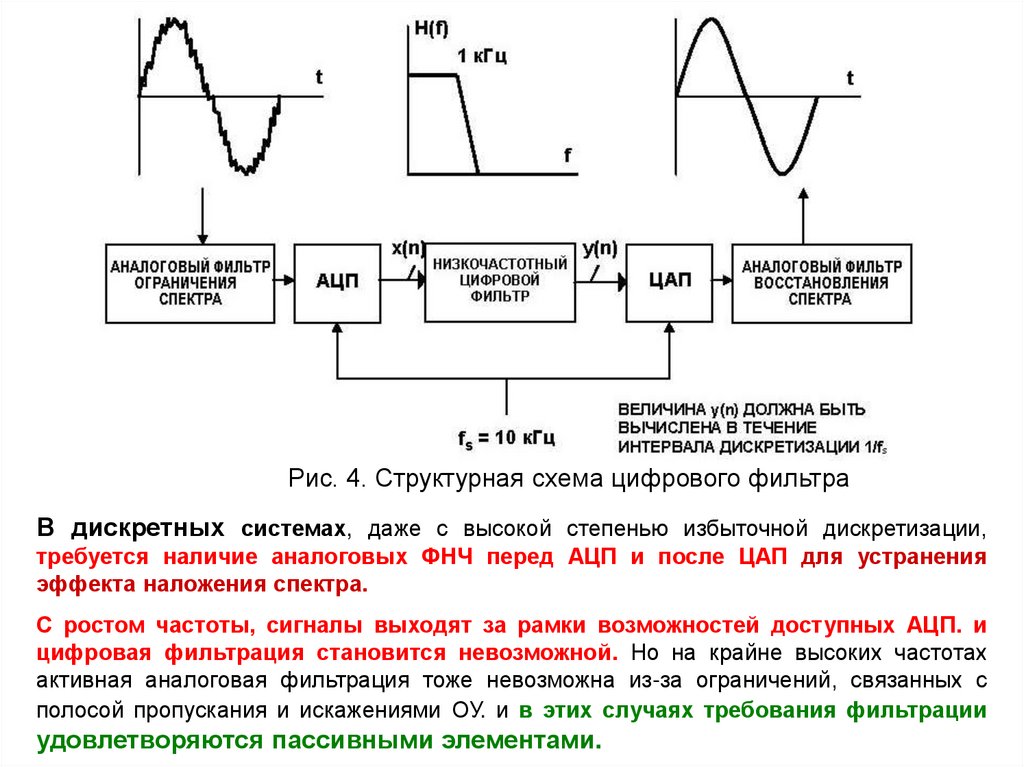
Рис. 4. Структурная схема цифрового фильтраВ дискретных системах, даже с высокой степенью избыточной дискретизации,
требуется наличие аналоговых ФНЧ перед АЦП и после ЦАП для устранения
эффекта наложения спектра.
С ростом частоты, сигналы выходят за рамки возможностей доступных АЦП. и
цифровая фильтрация становится невозможной. Но на крайне высоких частотах
активная аналоговая фильтрация тоже невозможна из-за ограничений, связанных с
полосой пропускания и искажениями ОУ. и в этих случаях требования фильтрации
удовлетворяются пассивными элементами.
11.
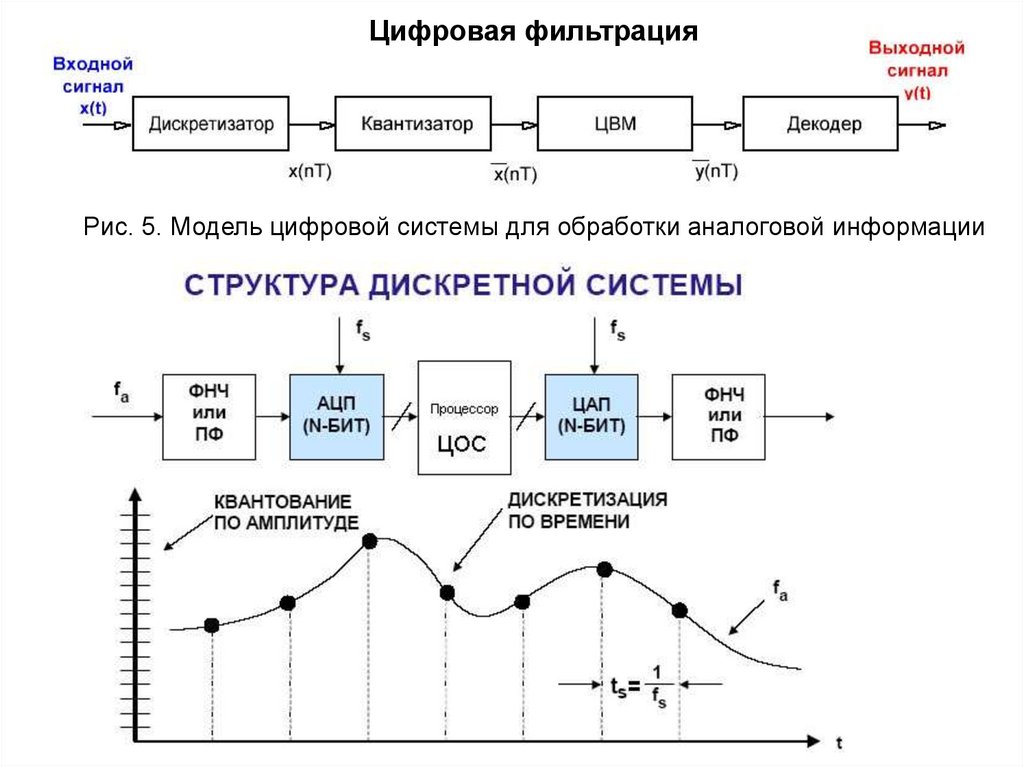
Цифровая фильтрацияРис. 5. Модель цифровой системы для обработки аналоговой информации
12.
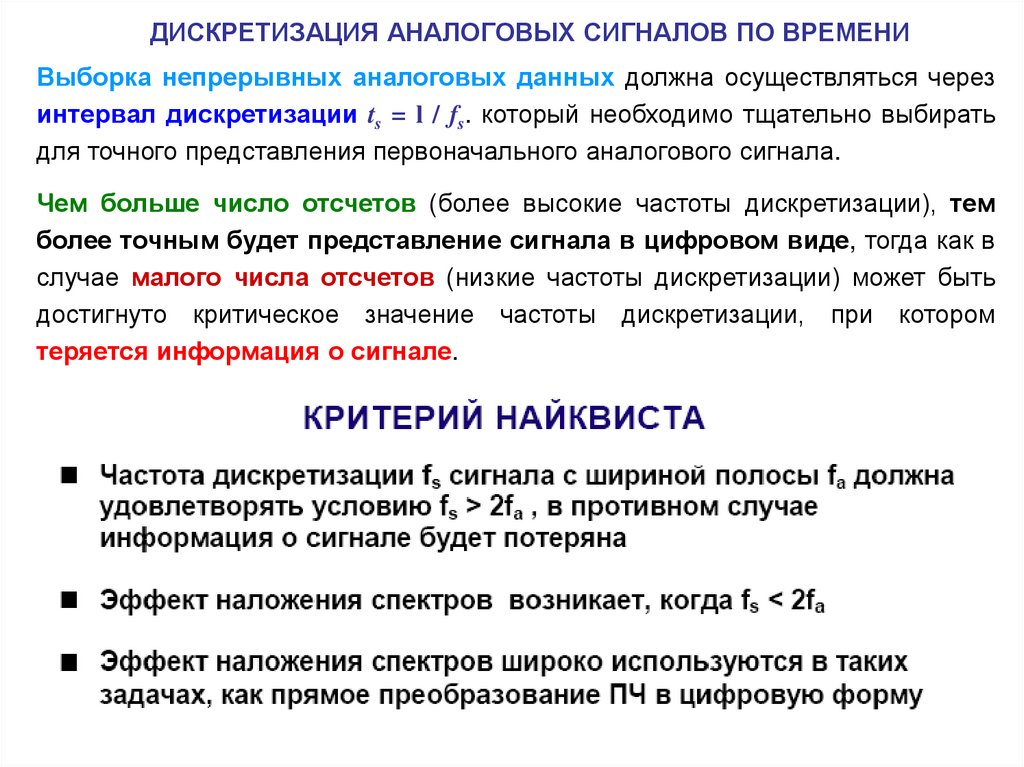
ДИСКРЕТИЗАЦИЯ АНАЛОГОВЫХ СИГНАЛОВ ПО ВРЕМЕНИВыборка непрерывных аналоговых данных должна осуществляться через
интервал дискретизации ts = l / fs. который необходимо тщательно выбирать
для точного представления первоначального аналогового сигнала.
Чем больше число отсчетов (более высокие частоты дискретизации), тем
более точным будет представление сигнала в цифровом виде, тогда как в
случае малого числа отсчетов (низкие частоты дискретизации) может быть
достигнуто критическое значение частоты дискретизации, при котором
теряется информация о сигнале.
13.
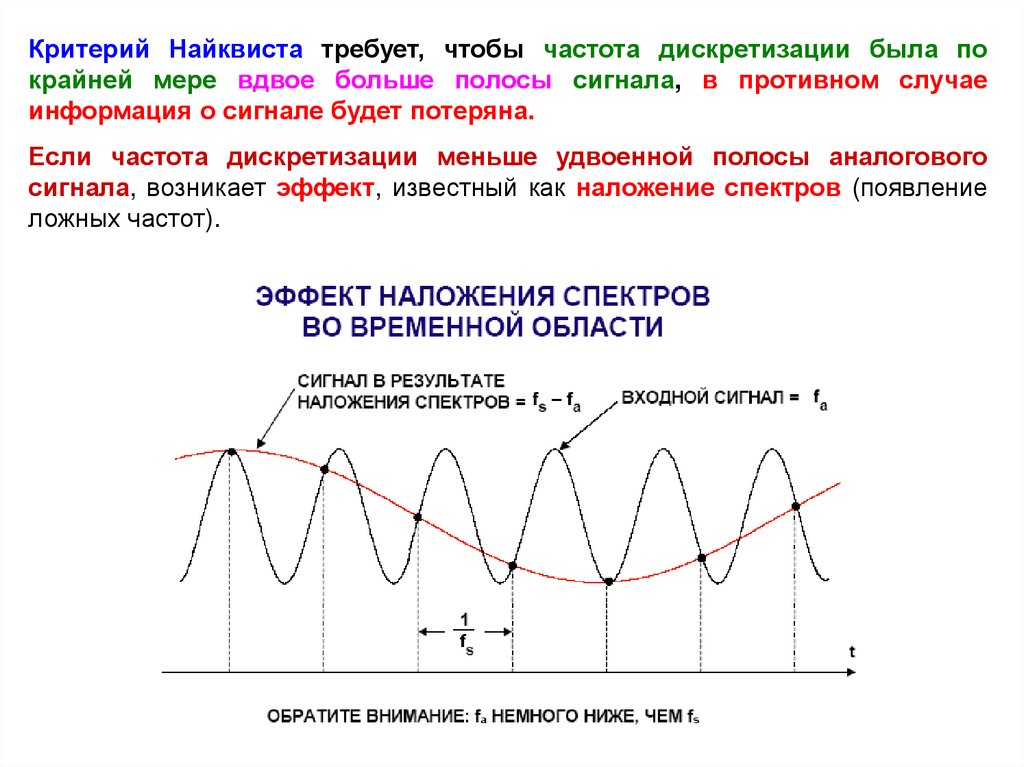
Критерий Найквиста требует, чтобы частота дискретизации была покрайней мере вдвое больше полосы сигнала, в противном случае
информация о сигнале будет потеряна.
Если частота дискретизации меньше удвоенной полосы аналогового
сигнала, возникает эффект, известный как наложение спектров (появление
ложных частот).
14.
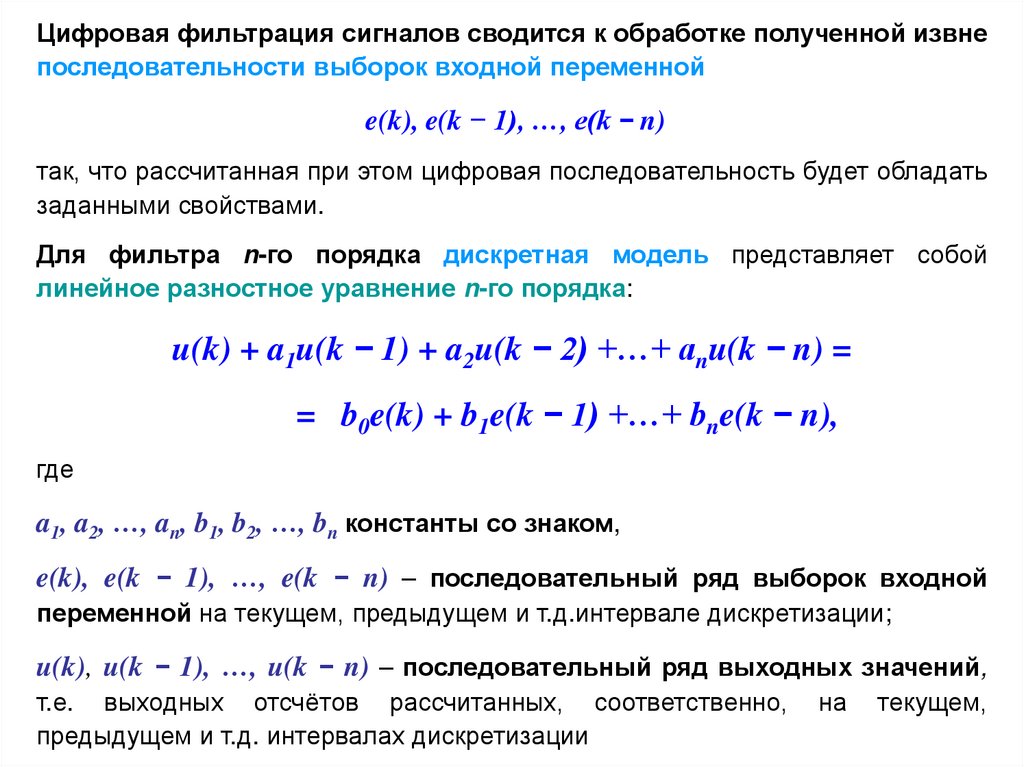
Цифровая фильтрация сигналов сводится к обработке полученной извнепоследовательности выборок входной переменной
e(k), e(k − 1), …, e(k − n)
так, что рассчитанная при этом цифровая последовательность будет обладать
заданными свойствами.
Для фильтра n-го порядка дискретная модель представляет собой
линейное разностное уравнение n-го порядка:
u(k) + a1u(k − 1) + a2u(k − 2) +…+ anu(k − n) =
= b0e(k) + b1e(k − 1) +…+ bne(k − n),
где
a1, a2, …, an, b1, b2, …, bn константы со знаком,
e(k), e(k − 1), …, e(k − n) – последовательный ряд выборок входной
переменной на текущем, предыдущем и т.д.интервале дискретизации;
u(k), u(k − 1), …, u(k − n) – последовательный ряд выходных значений,
т.е. выходных отсчётов рассчитанных, соответственно,
предыдущем и т.д. интервалах дискретизации
на
текущем,
15.
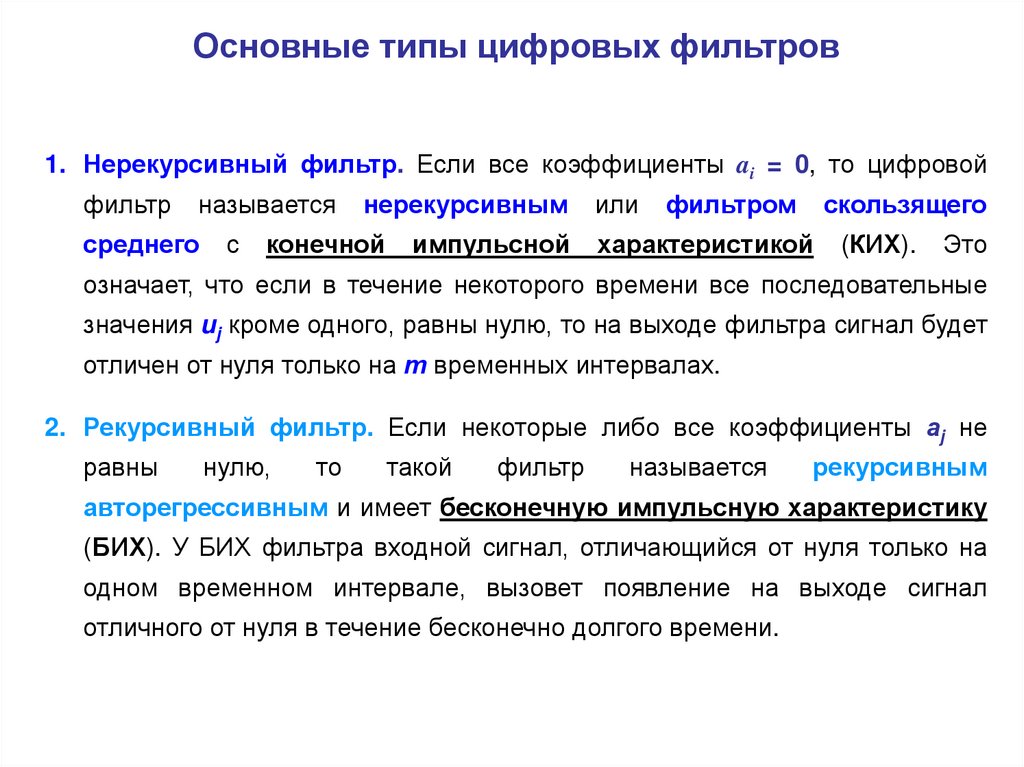
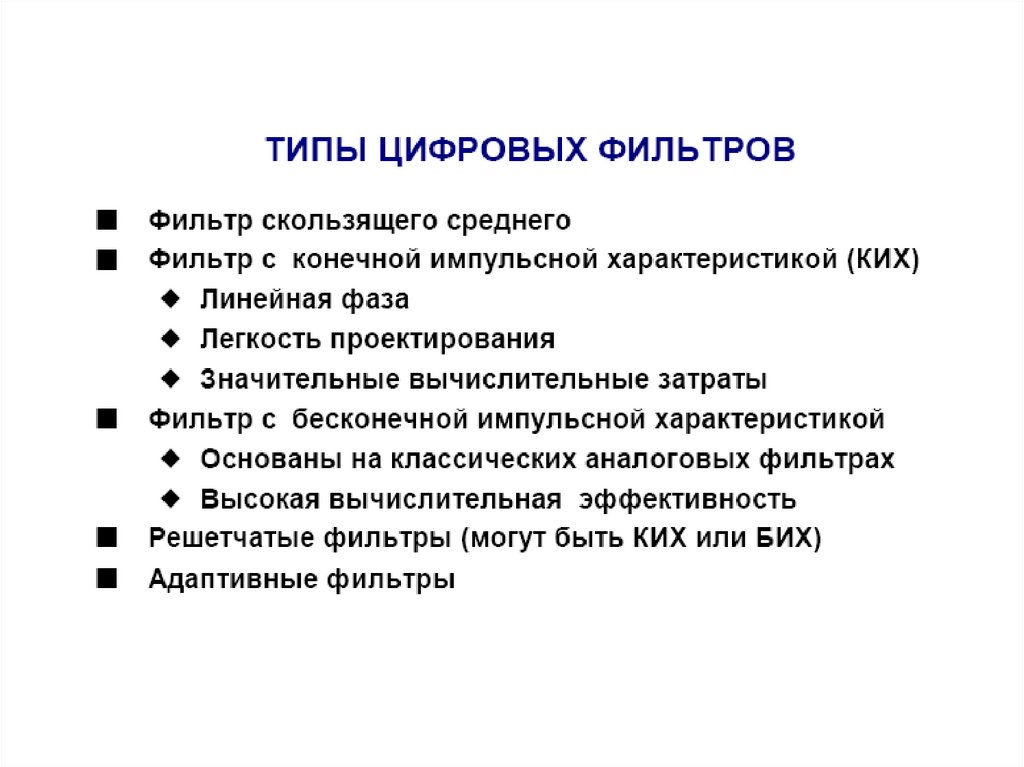
Основные типы цифровых фильтров1. Нерекурсивный фильтр. Если все коэффициенты ai = 0, то цифровой
фильтр
называется
среднего
с
нерекурсивным
конечной
импульсной
или
фильтром
скользящего
характеристикой
(КИХ).
Это
означает, что если в течение некоторого времени все последовательные
значения uj кроме одного, равны нулю, то на выходе фильтра сигнал будет
отличен от нуля только на т временных интервалах.
2. Рекурсивный фильтр. Если некоторые либо все коэффициенты аj не
равны
нулю,
то
такой
фильтр
называется
рекурсивным
авторегрессивным и имеет бесконечную импульсную характеристику
(БИХ). У БИХ фильтра входной сигнал, отличающийся от нуля только на
одном временном интервале, вызовет появление на выходе сигнал
отличного от нуля в течение бесконечно долгого времени.
16.
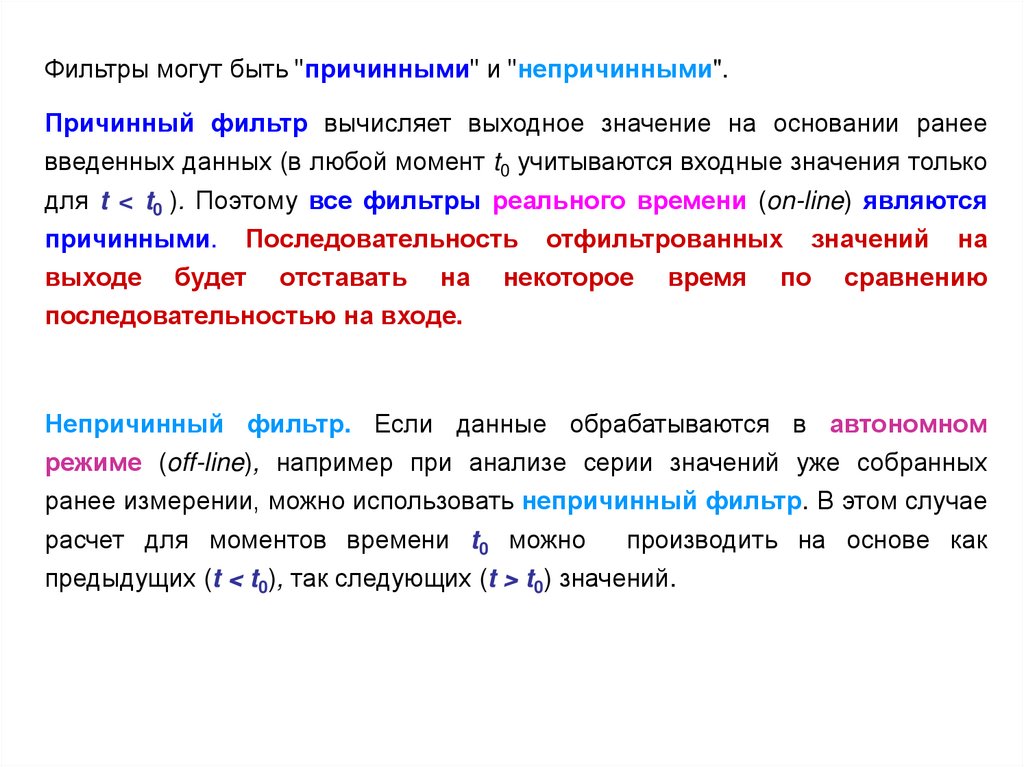
Фильтры могут быть "причинными" и "непричинными".Причинный фильтр вычисляет выходное значение на основании ранее
введенных данных (в любой момент t0 учитываются входные значения только
для t < t0 ). Поэтому все фильтры реального времени (on-line) являются
причинными. Последовательность отфильтрованных значений на
выходе будет отставать на некоторое время по сравнению
последовательностью на входе.
Непричинный фильтр. Если данные обрабатываются в автономном
режиме (off-line), например при анализе серии значений уже собранных
ранее измерении, можно использовать непричинный фильтр. В этом случае
расчет для моментов времени t0 можно
производить на основе как
предыдущих (t < t0), так следующих (t > t0) значений.
17.
18.
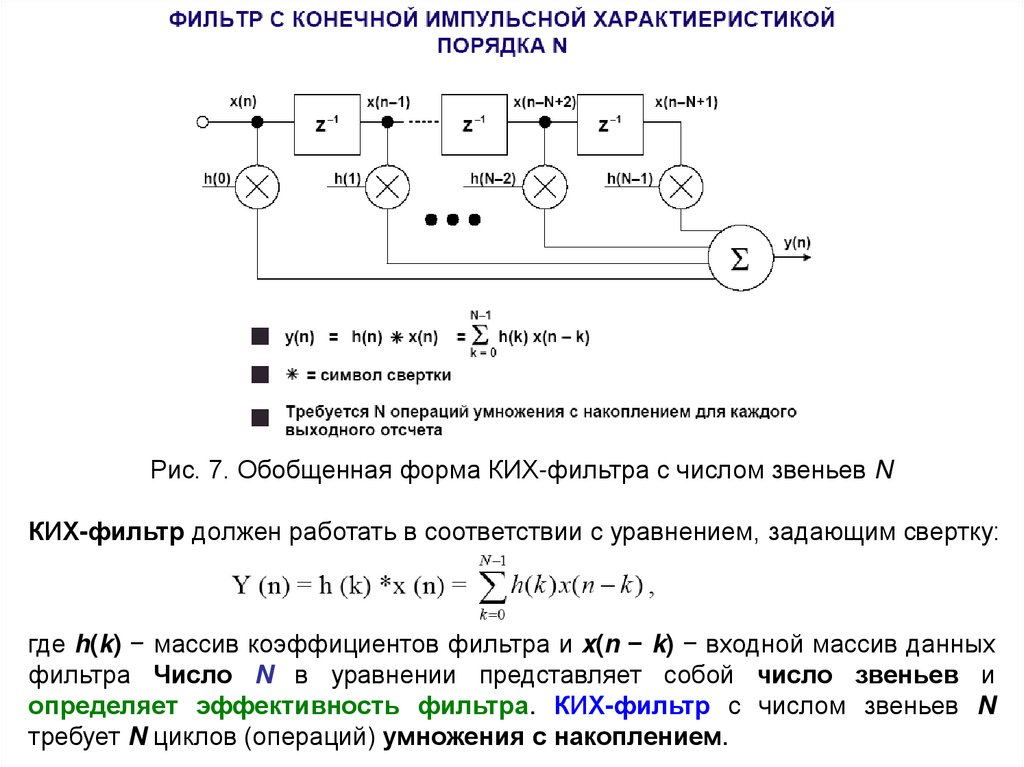
Рис. 7. Обобщенная форма КИХ-фильтра с числом звеньев NКИХ-фильтр должен работать в соответствии с уравнением, задающим свертку:
где h(k) − массив коэффициентов фильтра и x(n − k) − входной массив данных
фильтра Число N в уравнении представляет собой число звеньев и
определяет эффективность фильтра. КИХ-фильтр с числом звеньев N
требует N циклов (операций) умножения с накоплением.
19.
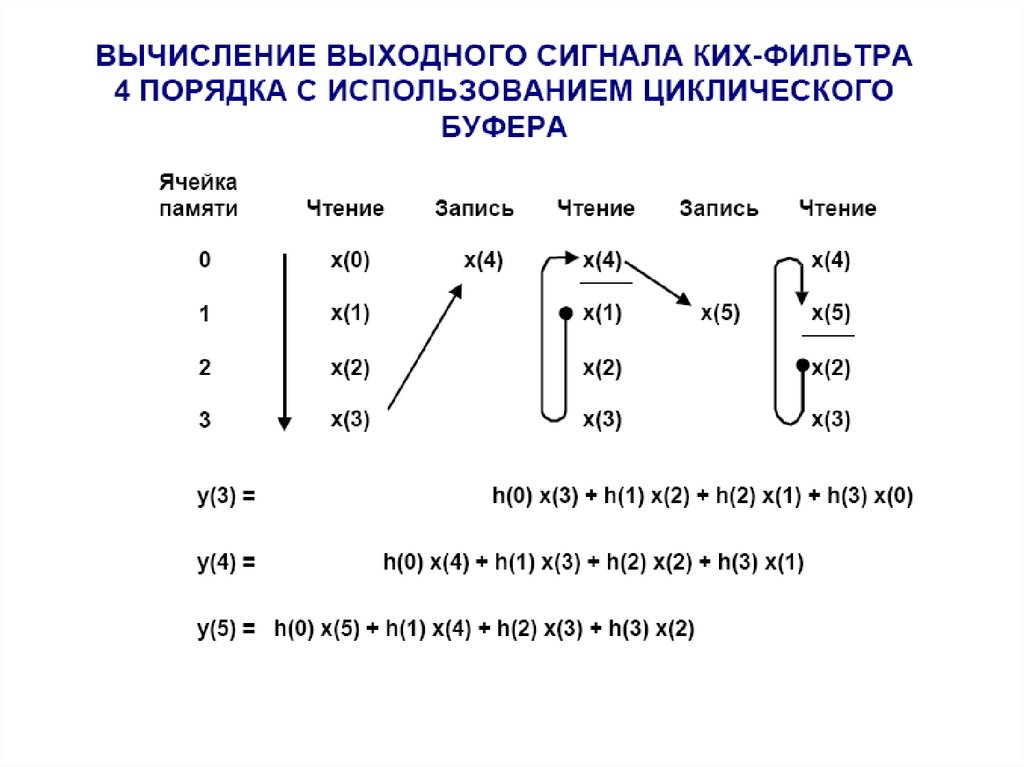
20.
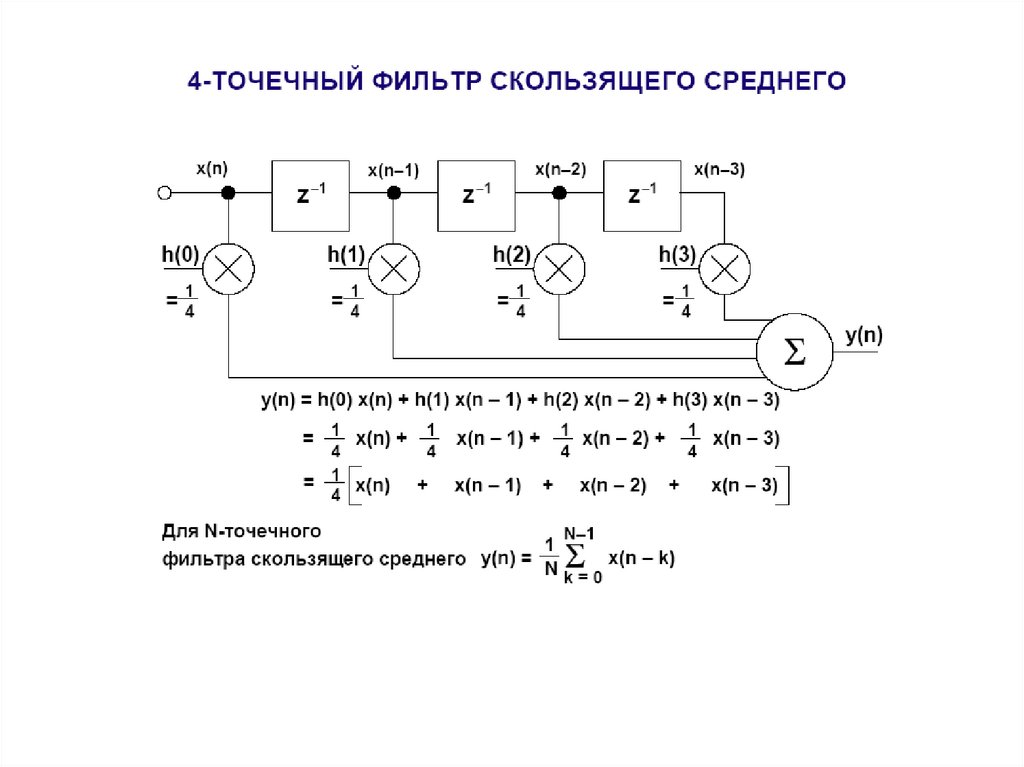
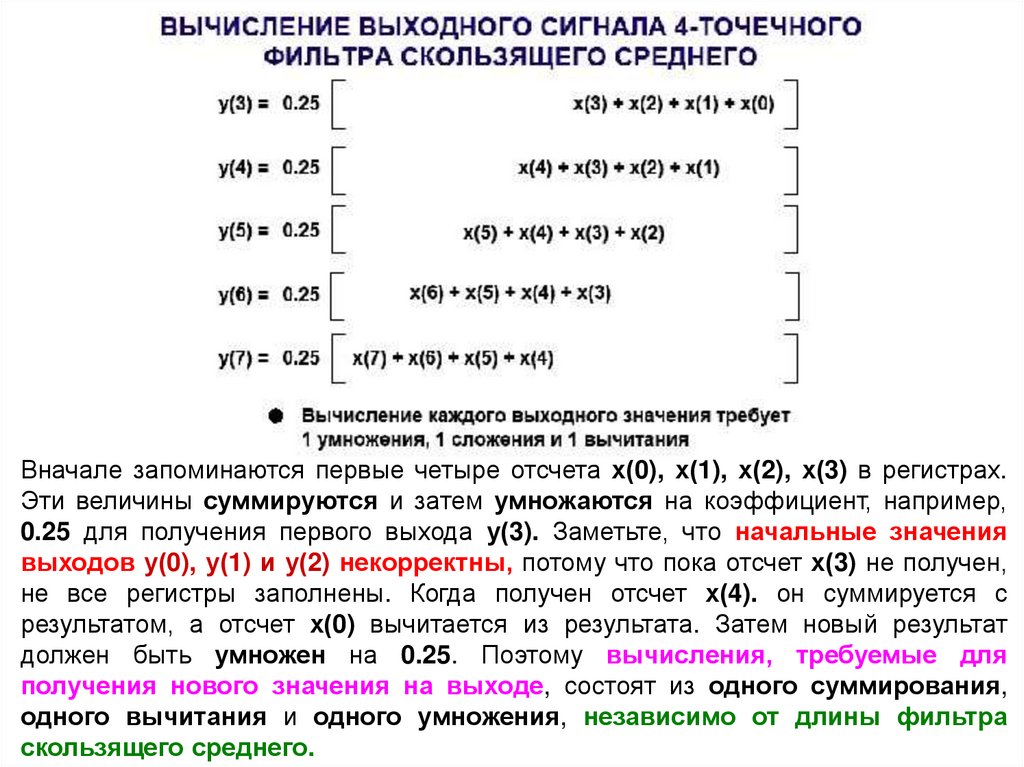
Вначале запоминаются первые четыре отсчета х(0), х(1), х(2), х(3) в регистрах.Эти величины суммируются и затем умножаются на коэффициент, например,
0.25 для получения первого выхода у(3). Заметьте, что начальные значения
выходов у(0), у(1) и у(2) некорректны, потому что пока отсчет х(3) не получен,
не все регистры заполнены. Когда получен отсчет х(4). он суммируется с
результатом, а отсчет х(0) вычитается из результата. Затем новый результат
должен быть умножен на 0.25. Поэтому вычисления, требуемые для
получения нового значения на выходе, состоят из одного суммирования,
одного вычитания и одного умножения, независимо от длины фильтра
скользящего среднего.
21.
22.
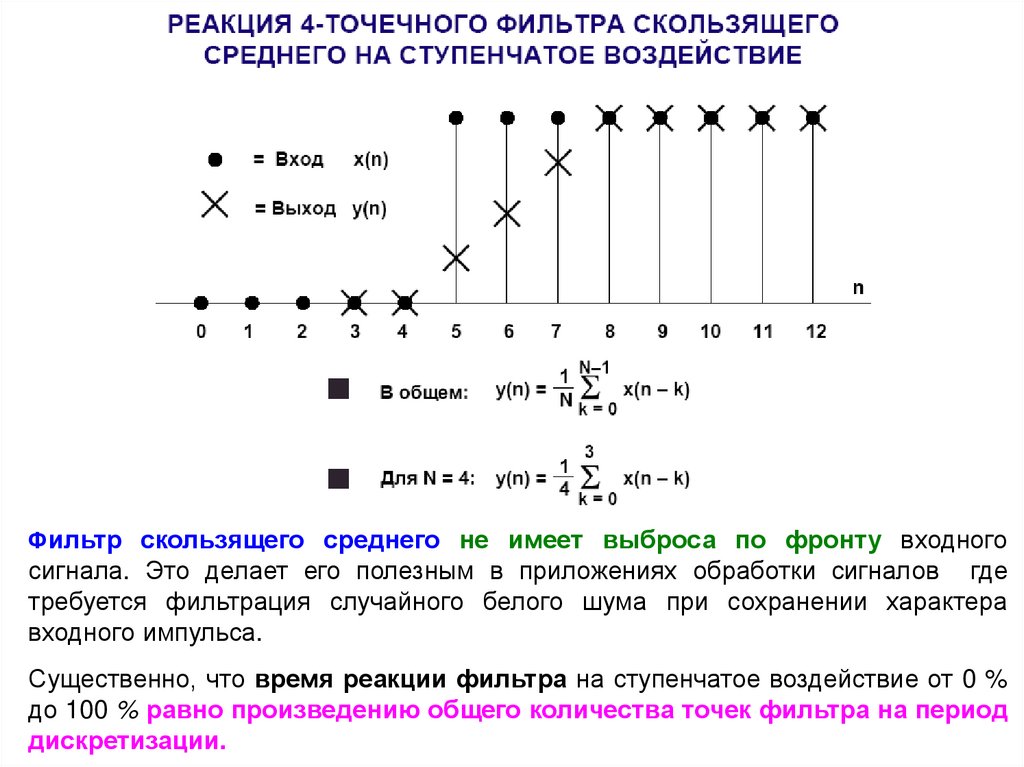
23.
Фильтр скользящего среднего не имеет выброса по фронту входногосигнала. Это делает его полезным в приложениях обработки сигналов где
требуется фильтрация случайного белого шума при сохранении характера
входного импульса.
Существенно, что время реакции фильтра на ступенчатое воздействие от 0 %
до 100 % равно произведению общего количества точек фильтра на период
дискретизации.
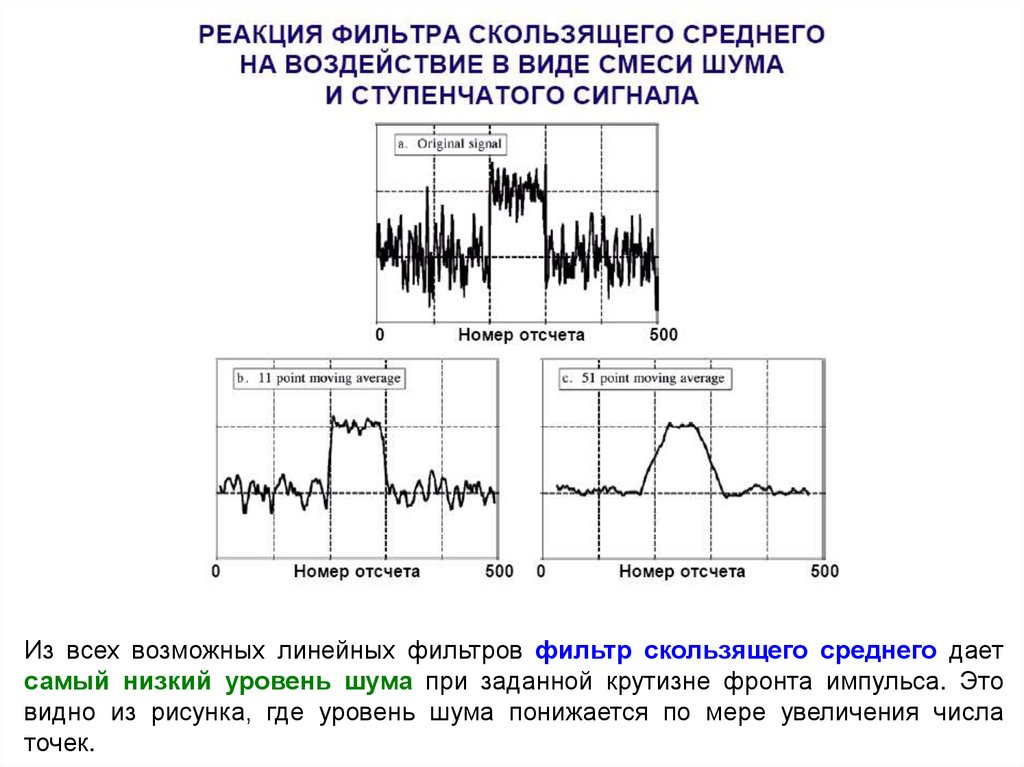
24.
Из всех возможных линейных фильтров фильтр скользящего среднего даетсамый низкий уровень шума при заданной крутизне фронта импульса. Это
видно из рисунка, где уровень шума понижается по мере увеличения числа
точек.
25.
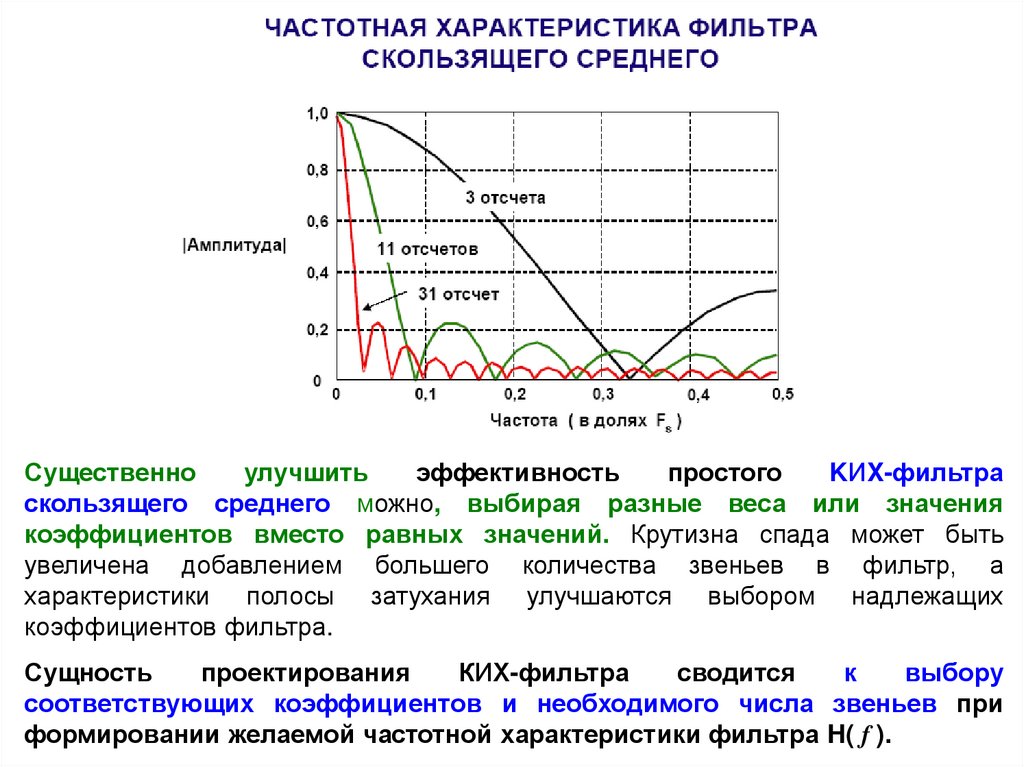
Существенноулучшить
эффективность
простого
KИX-фильтра
скользящего среднего можно, выбирая разные веса или значения
коэффициентов вместо равных значений. Крутизна спада может быть
увеличена добавлением большего количества звеньев в фильтр, а
характеристики полосы затухания улучшаются выбором надлежащих
коэффициентов фильтра.
Сущность
проектирования
КИХ-фильтра
сводится
к
выбору
соответствующих коэффициентов и необходимого числа звеньев при
формировании желаемой частотной характеристики фильтра H( f ).
26.
27.
28.
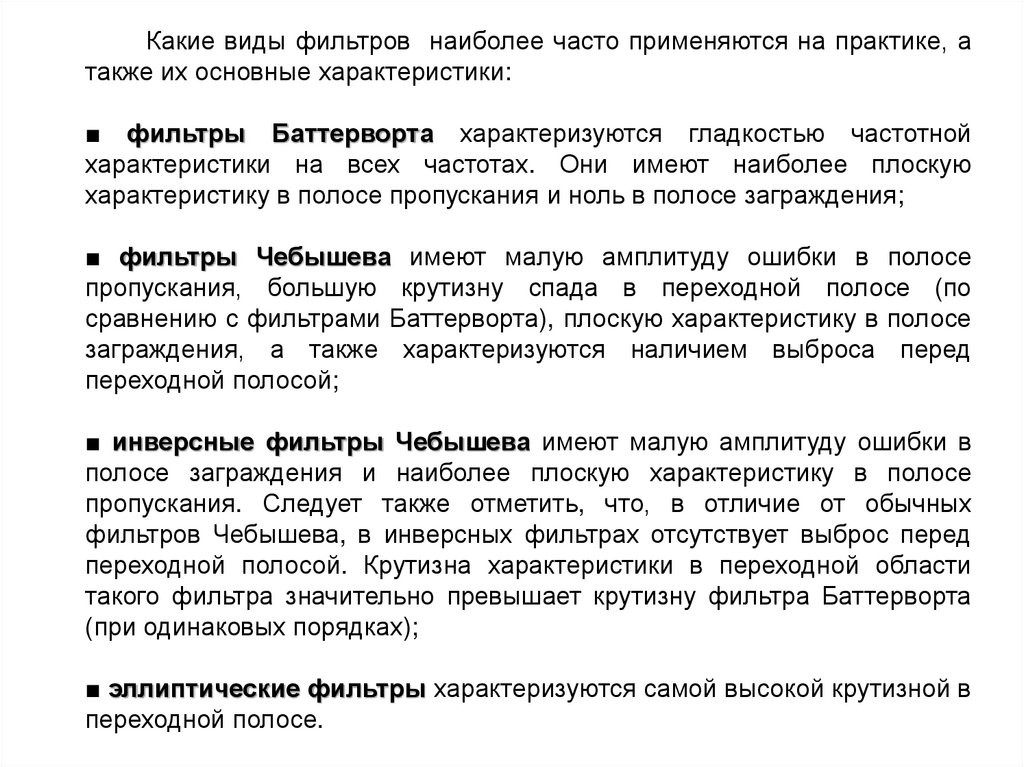
Какие виды фильтров наиболее часто применяются на практике, атакже их основные характеристики:
■ фильтры Баттерворта характеризуются гладкостью частотной
характеристики на всех частотах. Они имеют наиболее плоскую
характеристику в полосе пропускания и ноль в полосе заграждения;
■ фильтры Чебышева имеют малую амплитуду ошибки в полосе
пропускания, большую крутизну спада в переходной полосе (по
сравнению с фильтрами Баттерворта), плоскую характеристику в полосе
заграждения, а также характеризуются наличием выброса перед
переходной полосой;
■ инверсные фильтры Чебышева имеют малую амплитуду ошибки в
полосе заграждения и наиболее плоскую характеристику в полосе
пропускания. Следует также отметить, что, в отличие от обычных
фильтров Чебышева, в инверсных фильтрах отсутствует выброс перед
переходной полосой. Крутизна характеристики в переходной области
такого фильтра значительно превышает крутизну фильтра Баттерворта
(при одинаковых порядках);
■ эллиптические фильтры характеризуются самой высокой крутизной в
переходной полосе.
29.
30.
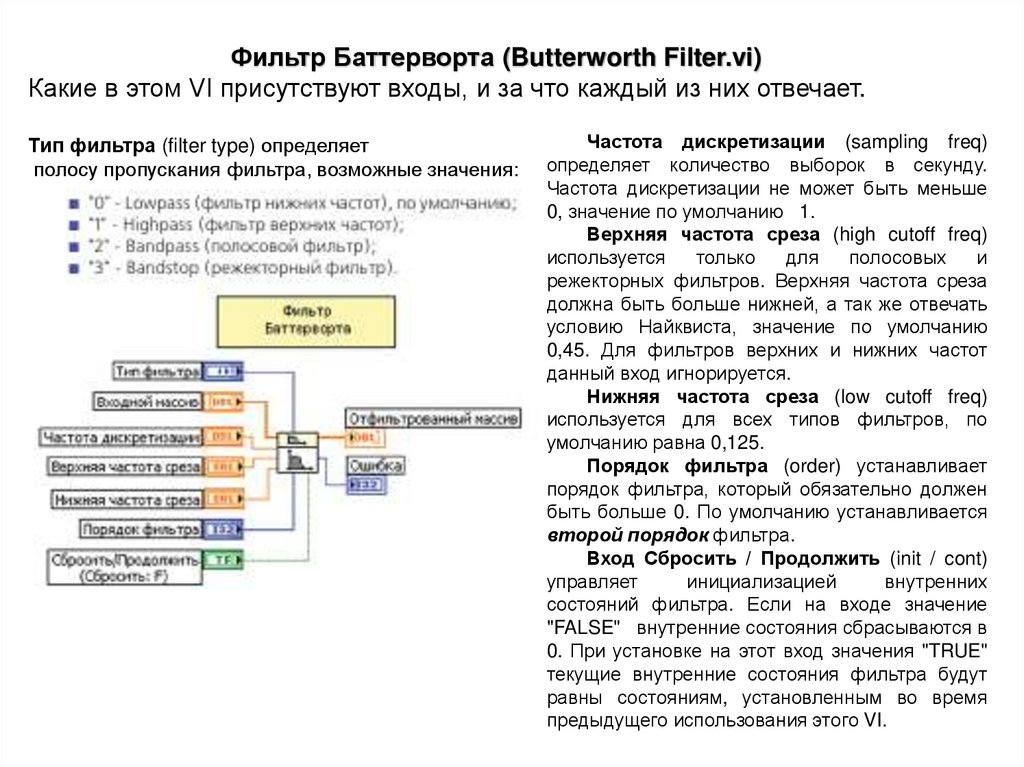
Фильтр Баттерворта (Butterworth Filter.vi)Какие в этом VI присутствуют входы, и за что каждый из них отвечает.
Тип фильтра (filter type) определяет
полосу пропускания фильтра, возможные значения:
Частота дискретизации (sampling freq)
определяет количество выборок в секунду.
Частота дискретизации не может быть меньше
0, значение по умолчанию 1.
Верхняя частота среза (high cutoff freq)
используется
только
для
полосовых
и
режекторных фильтров. Верхняя частота среза
должна быть больше нижней, а так же отвечать
условию Найквиста, значение по умолчанию
0,45. Для фильтров верхних и нижних частот
данный вход игнорируется.
Нижняя частота среза (low cutoff freq)
используется для всех типов фильтров, по
умолчанию равна 0,125.
Порядок фильтра (order) устанавливает
порядок фильтра, который обязательно должен
быть больше 0. По умолчанию устанавливается
второй порядок фильтра.
Вход Сбросить / Продолжить (init / cont)
управляет
инициализацией
внутренних
состояний фильтра. Если на входе значение
"FALSE" внутренние состояния сбрасываются в
0. При установке на этот вход значения "TRUE"
текущие внутренние состояния фильтра будут
равны состояниям, установленным во время
предыдущего использования этого VI.
31.
32.
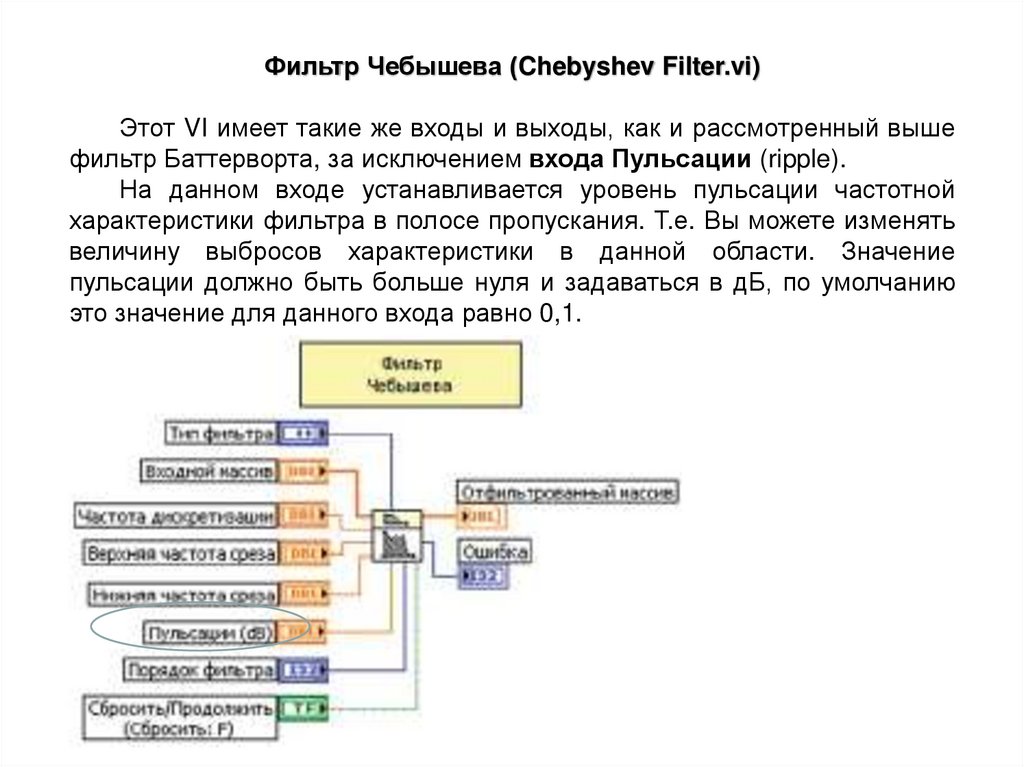
Фильтр Чебышева (Chebyshev Filter.vi)Этот VI имеет такие же входы и выходы, как и рассмотренный выше
фильтр Баттерворта, за исключением входа Пульсации (ripple).
На данном входе устанавливается уровень пульсации частотной
характеристики фильтра в полосе пропускания. Т.е. Вы можете изменять
величину выбросов характеристики в данной области. Значение
пульсации должно быть больше нуля и задаваться в дБ, по умолчанию
это значение для данного входа равно 0,1.
33.
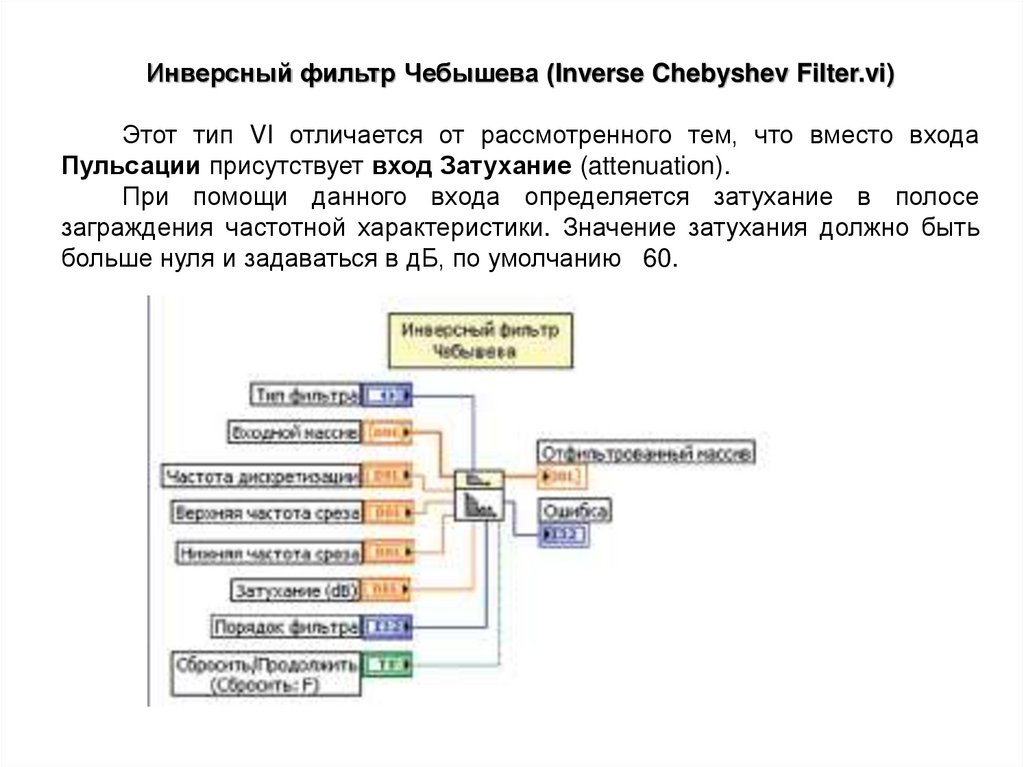
Инверсный фильтр Чебышева (Inverse Chebyshev Filter.vi)Этот тип VI отличается от рассмотренного тем, что вместо входа
Пульсации присутствует вход Затухание (attenuation).
При помощи данного входа определяется затухание в полосе
заграждения частотной характеристики. Значение затухания должно быть
больше нуля и задаваться в дБ, по умолчанию 60.
34.
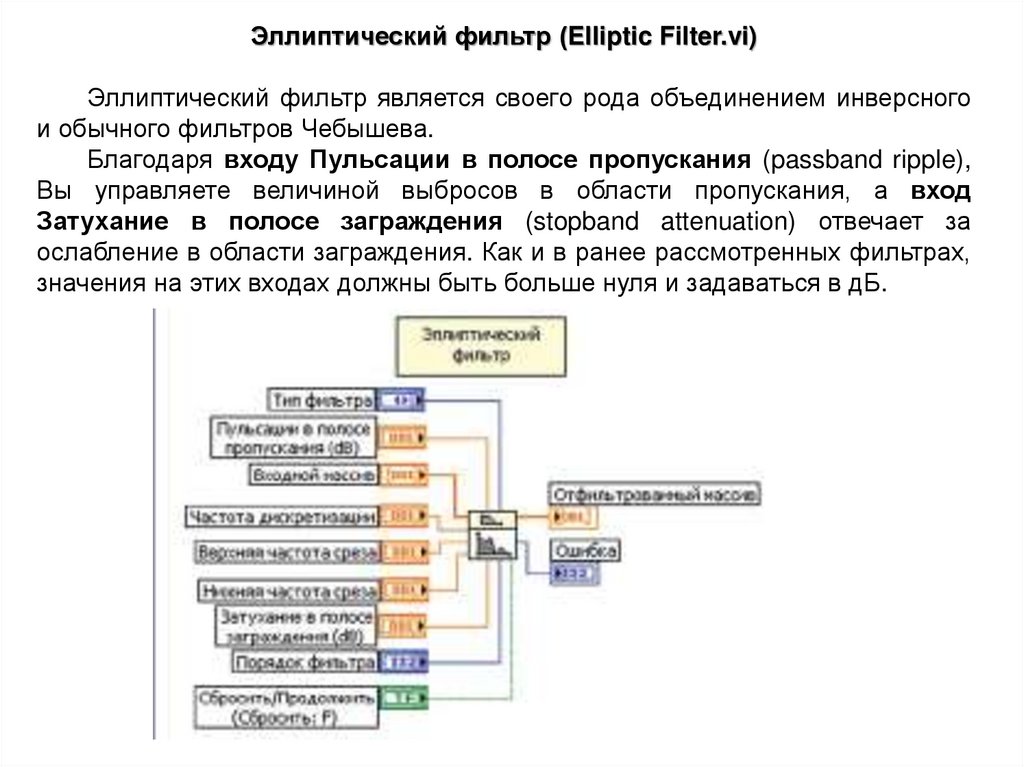
Эллиптический фильтр (Elliptic Filter.vi)Эллиптический фильтр является своего рода объединением инверсного
и обычного фильтров Чебышева.
Благодаря входу Пульсации в полосе пропускания (passband ripple),
Вы управляете величиной выбросов в области пропускания, а вход
Затухание в полосе заграждения (stopband attenuation) отвечает за
ослабление в области заграждения. Как и в ранее рассмотренных фильтрах,
значения на этих входах должны быть больше нуля и задаваться в дБ.
35.
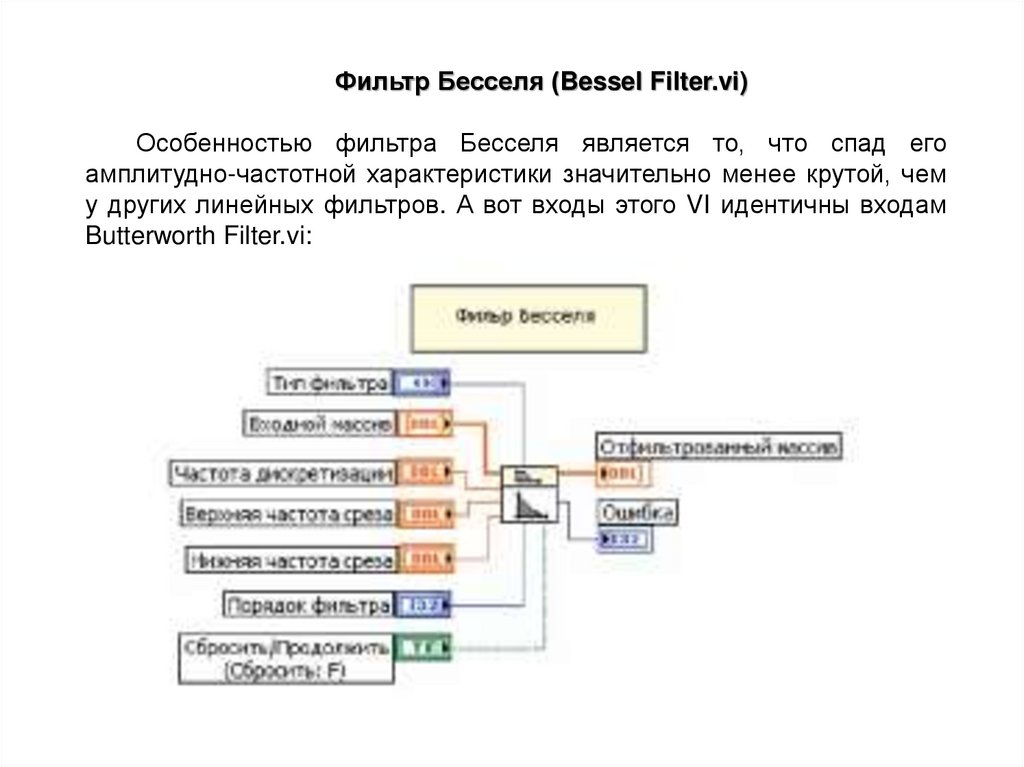
Фильтр Бесселя (Bessel Filter.vi)Особенностью фильтра Бесселя является то, что спад его
амплитудно-частотной характеристики значительно менее крутой, чем
у других линейных фильтров. А вот входы этого VI идентичны входам
Butterworth Filter.vi:
36.
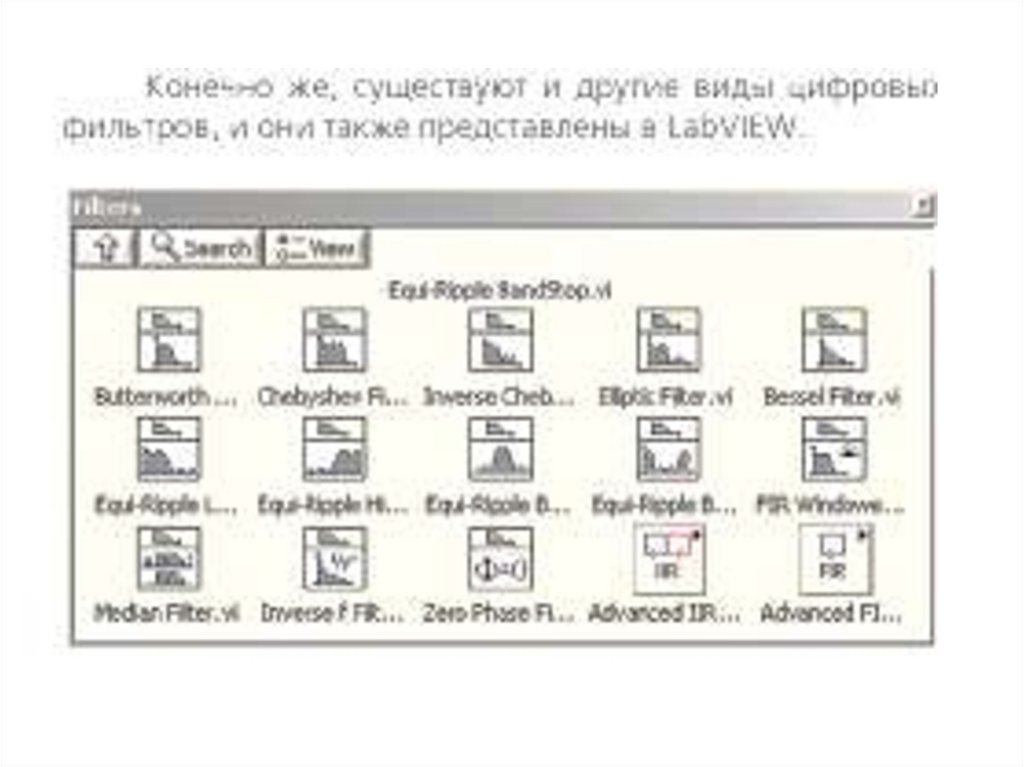
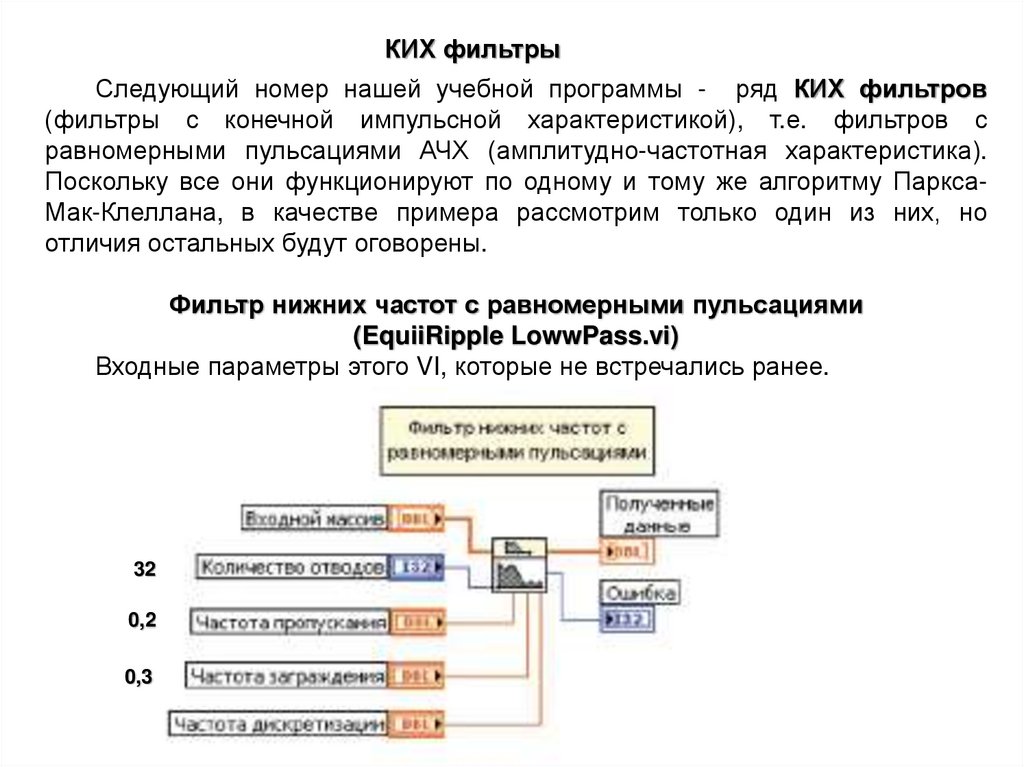
КИХ фильтрыСледующий номер нашей учебной программы - ряд КИХ фильтров
(фильтры с конечной импульсной характеристикой), т.е. фильтров с
равномерными пульсациями АЧХ (амплитудно-частотная характеристика).
Поскольку все они функционируют по одному и тому же алгоритму ПарксаМак-Клеллана, в качестве примера рассмотрим только один из них, но
отличия остальных будут оговорены.
Фильтр нижних частот с равномерными пульсациями
(EquiiRipple LowwPass.vi)
Входные параметры этого VI, которые не встречались ранее.
32
0,2
0,3
37.
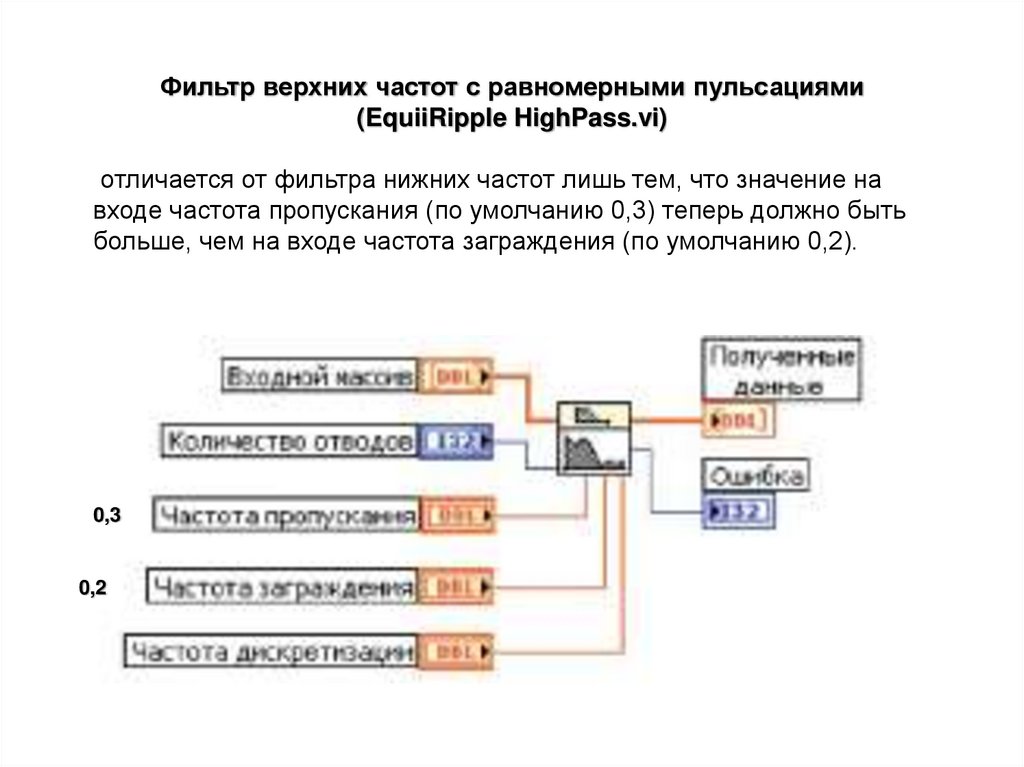
Фильтр верхних частот с равномерными пульсациями(EquiiRipple HighPass.vi)
отличается от фильтра нижних частот лишь тем, что значение на
входе частота пропускания (по умолчанию 0,3) теперь должно быть
больше, чем на входе частота заграждения (по умолчанию 0,2).
0,3
0,2
38.
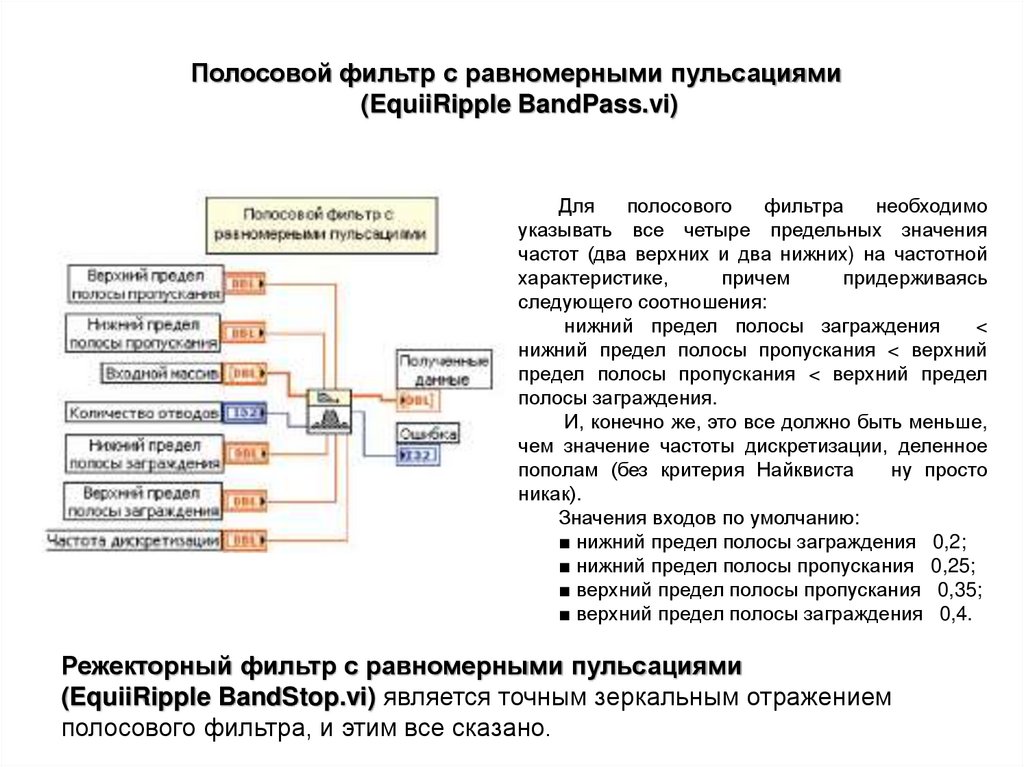
Полосовой фильтр с равномерными пульсациями(EquiiRipple BandPass.vi)
Для
полосового
фильтра
необходимо
указывать все четыре предельных значения
частот (два верхних и два нижних) на частотной
характеристике,
причем
придерживаясь
следующего соотношения:
нижний предел полосы заграждения
<
нижний предел полосы пропускания < верхний
предел полосы пропускания < верхний предел
полосы заграждения.
И, конечно же, это все должно быть меньше,
чем значение частоты дискретизации, деленное
пополам (без критерия Найквиста
ну просто
никак).
Значения входов по умолчанию:
■ нижний предел полосы заграждения 0,2;
■ нижний предел полосы пропускания 0,25;
■ верхний предел полосы пропускания 0,35;
■ верхний предел полосы заграждения 0,4.
Режекторный фильтр с равномерными пульсациями
(EquiiRipple BandStop.vi) является точным зеркальным отражением
полосового фильтра, и этим все сказано.
39.
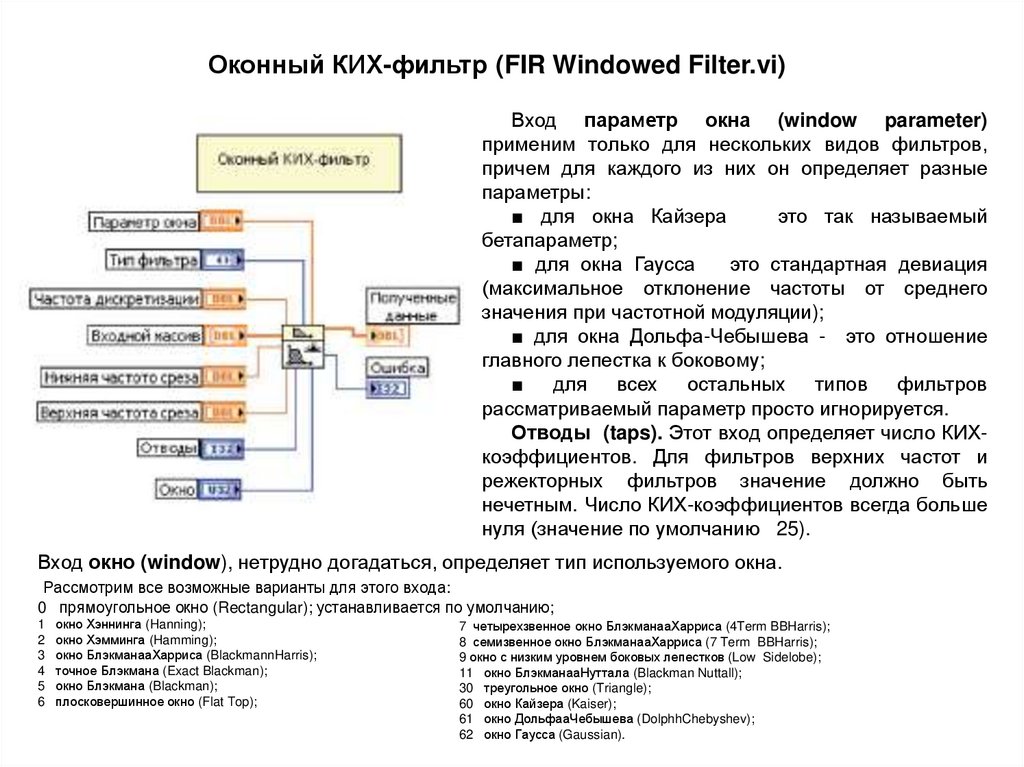
Оконный КИХ-фильтр (FIR Windowed Filter.vi)Вход параметр окна (window parameter)
применим только для нескольких видов фильтров,
причем для каждого из них он определяет разные
параметры:
■ для окна Кайзера
это так называемый
бетапараметр;
■ для окна Гаусса
это стандартная девиация
(максимальное отклонение частоты от среднего
значения при частотной модуляции);
■ для окна Дольфа-Чебышева - это отношение
главного лепестка к боковому;
■ для всех остальных типов фильтров
рассматриваемый параметр просто игнорируется.
Отводы (taps). Этот вход определяет число КИХкоэффициентов. Для фильтров верхних частот и
режекторных фильтров значение должно быть
нечетным. Число КИХ-коэффициентов всегда больше
нуля (значение по умолчанию 25).
Вход окно (window), нетрудно догадаться, определяет тип используемого окна.
Рассмотрим все возможные варианты для этого входа:
0 прямоугольное окно (Rectangular); устанавливается по умолчанию;
1
2
3
4
5
6
окно Хэннинга (Hanning);
окно Хэмминга (Hamming);
окно БлэкманааХарриса (BlackmannHarris);
точное Блэкмана (Exact Blackman);
окно Блэкмана (Blackman);
плосковершинное окно (Flat Top);
7 четырехзвенное окно БлэкманааХарриса (4Term BBHarris);
8 семизвенное окно БлэкманааХарриса (7 Term BBHarris);
9 окно с низким уровнем боковых лепестков (Low Sidelobe);
11 окно БлэкманааНуттала (Blackman Nuttall);
30 треугольное окно (Triangle);
60 окно Кайзера (Kaiser);
61 окно ДольфааЧебышева (DolphhChebyshev);
62 окно Гаусса (Gaussian).
40.
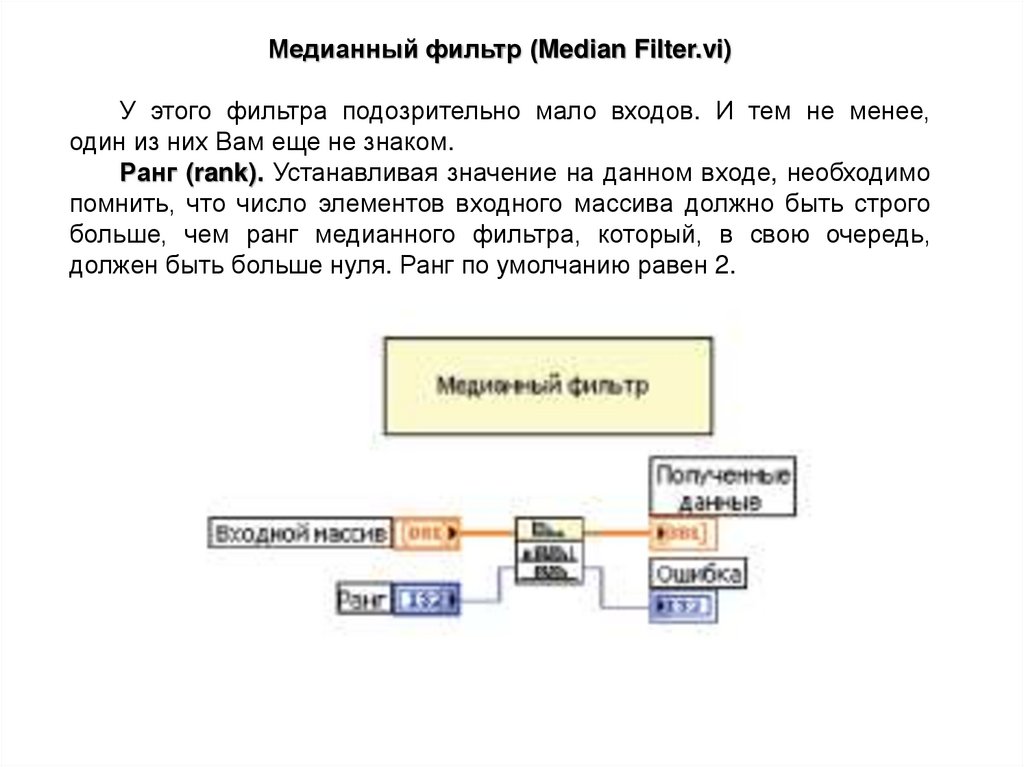
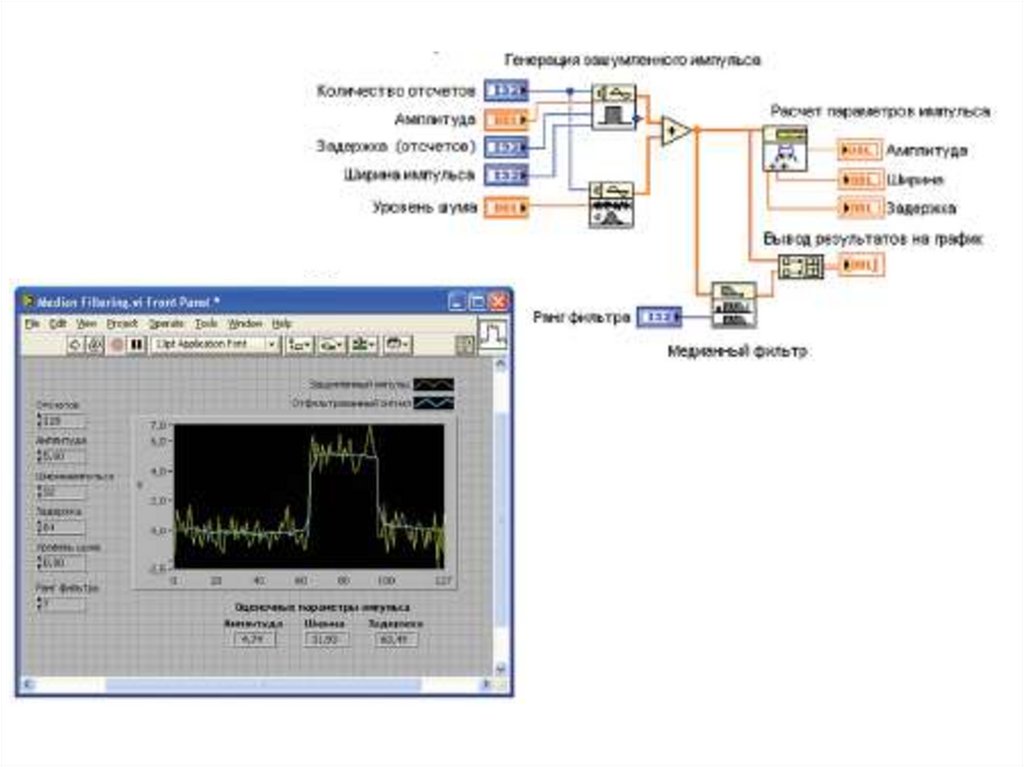
Медианный фильтр (Median Filter.vi)У этого фильтра подозрительно мало входов. И тем не менее,
один из них Вам еще не знаком.
Ранг (rank). Устанавливая значение на данном входе, необходимо
помнить, что число элементов входного массива должно быть строго
больше, чем ранг медианного фильтра, который, в свою очередь,
должен быть больше нуля. Ранг по умолчанию равен 2.
41.
42.
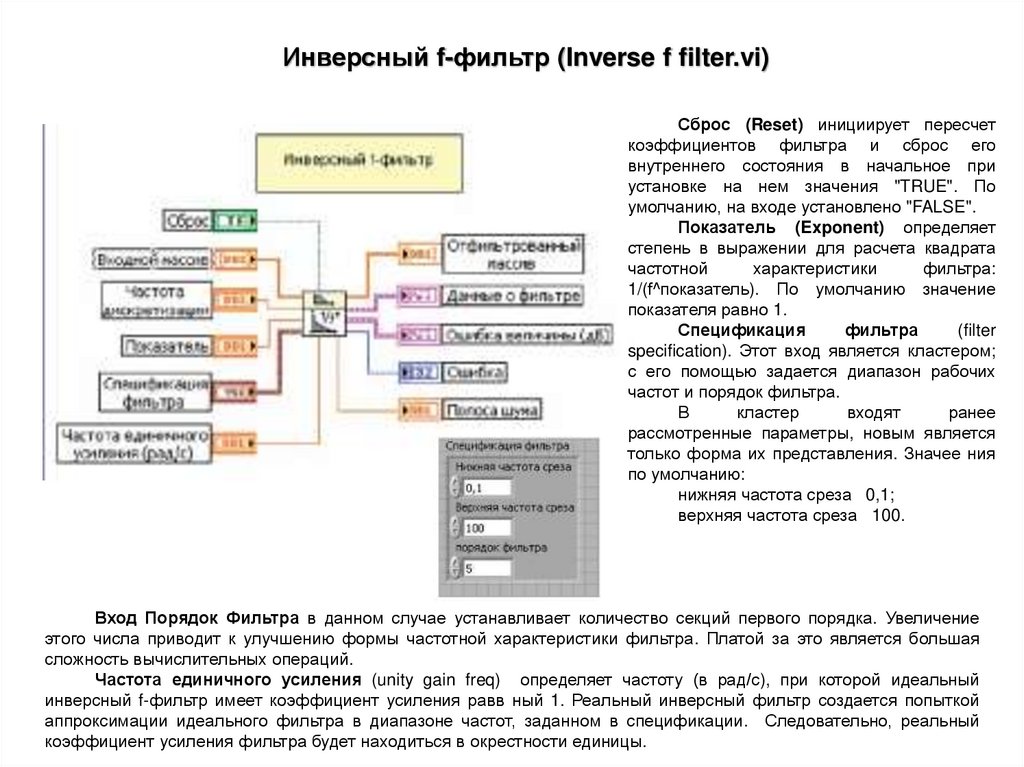
Инверсный f-фильтр (Inverse f filter.vi)Сброс (Reset) инициирует пересчет
коэффициентов фильтра и сброс его
внутреннего состояния в начальное при
установке на нем значения "TRUE". По
умолчанию, на входе установлено "FALSE".
Показатель (Exponent) определяет
степень в выражении для расчета квадрата
частотной
характеристики
фильтра:
1/(f^показатель). По умолчанию значение
показателя равно 1.
Спецификация
фильтра
(filter
specification). Этот вход является кластером;
с его помощью задается диапазон рабочих
частот и порядок фильтра.
В
кластер
входят
ранее
рассмотренные параметры, новым является
только форма их представления. Значее ния
по умолчанию:
нижняя частота среза 0,1;
верхняя частота среза 100.
Вход Порядок Фильтра в данном случае устанавливает количество секций первого порядка. Увеличение
этого числа приводит к улучшению формы частотной характеристики фильтра. Платой за это является большая
сложность вычислительных операций.
Частота единичного усиления (unity gain freq) определяет частоту (в рад/с), при которой идеальный
инверсный f-фильтр имеет коэффициент усиления равв ный 1. Реальный инверсный фильтр создается попыткой
аппроксимации идеального фильтра в диапазоне частот, заданном в спецификации. Следовательно, реальный
коэффициент усиления фильтра будет находиться в окрестности единицы.
43.
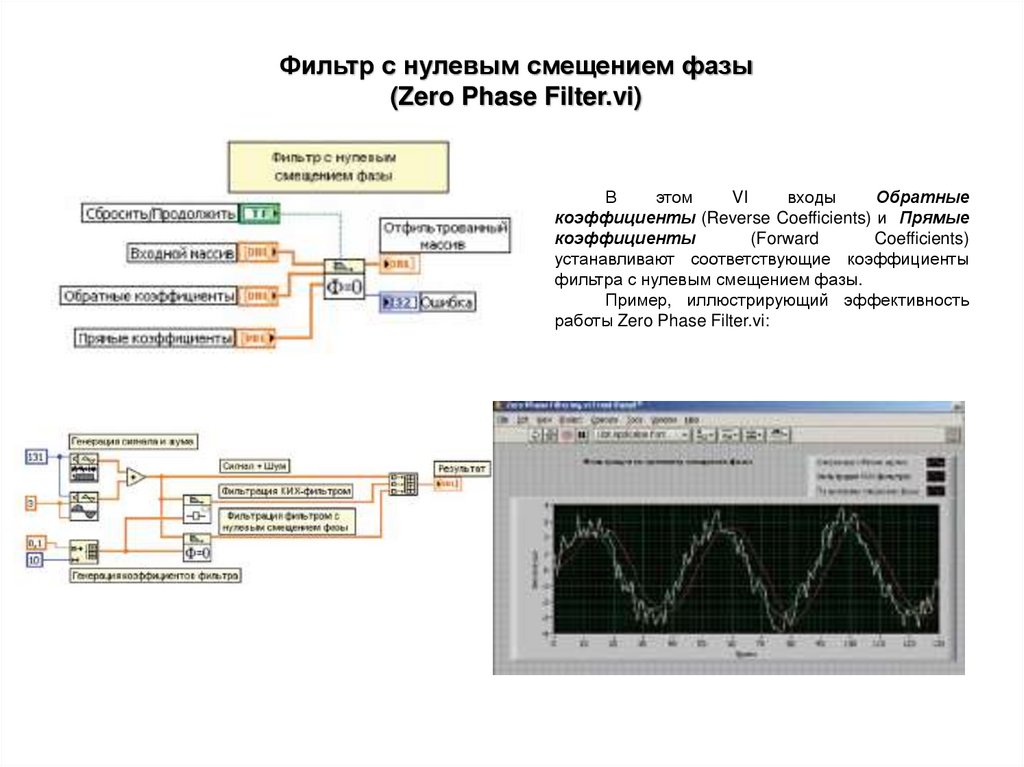
Фильтр с нулевым смещением фазы(Zero Phase Filter.vi)
В
этом
VI
входы
Обратные
коэффициенты (Reverse Coefficients) и Прямые
коэффициенты
(Forward
Coefficients)
устанавливают соответствующие коэффициенты
фильтра с нулевым смещением фазы.
Пример, иллюстрирующий эффективность
работы Zero Phase Filter.vi:
44.
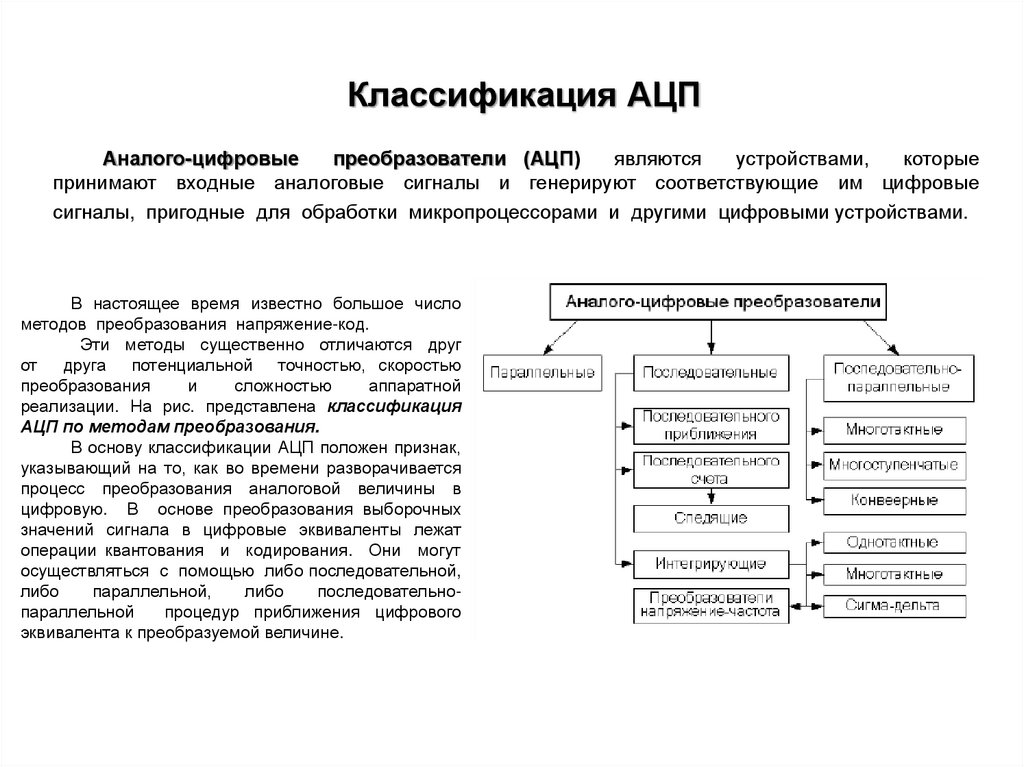
Классификация АЦПАналого-цифровые
преобразователи (АЦП)
являются
устройствами,
которые
принимают входные аналоговые сигналы и генерируют соответствующие им цифровые
сигналы, пригодные для обработки микропроцессорами и другими цифровыми устройствами.
В настоящее время известно большое число
методов преобразования напряжение-код.
Эти методы существенно отличаются друг
от друга потенциальной точностью, скоростью
преобразования
и
сложностью
аппаратной
реализации. На рис. представлена классификация
АЦП по методам преобразования.
В основу классификации АЦП положен признак,
указывающий на то, как во времени разворачивается
процесс преобразования аналоговой величины в
цифровую. В основе преобразования выборочных
значений сигнала в цифровые эквиваленты лежат
операции квантования и кодирования. Они могут
осуществляться с помощью либо последовательной,
либо
параллельной,
либо
последовательнопараллельной
процедур приближения цифрового
эквивалента к преобразуемой величине.
45.
46.
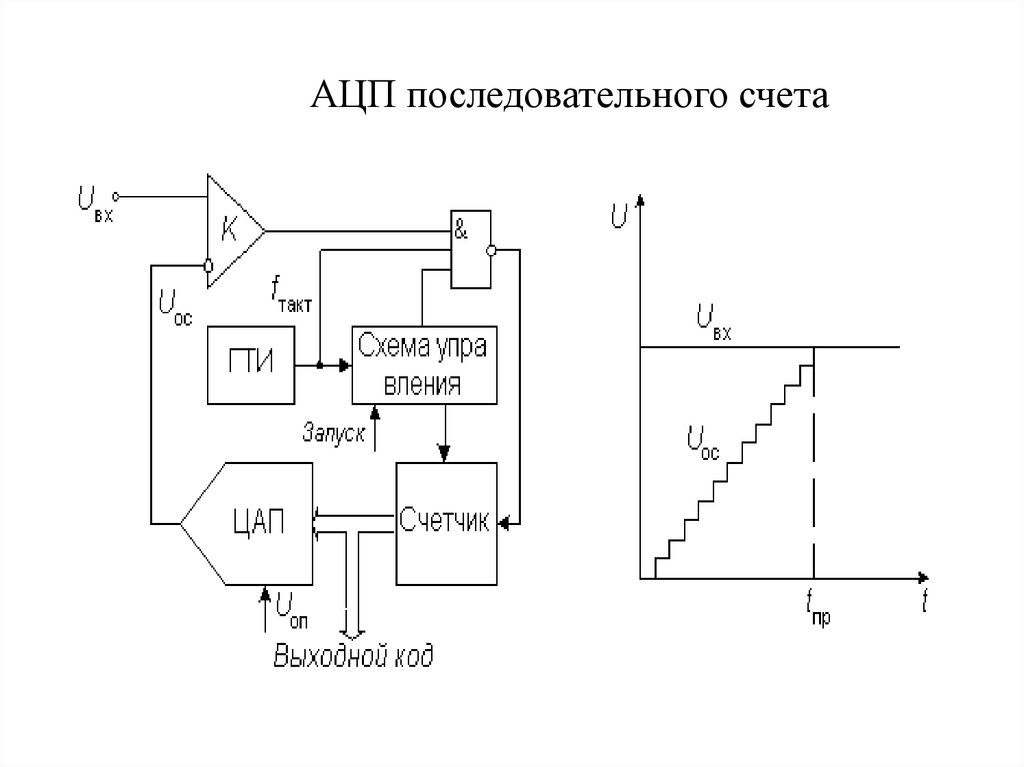
АЦП последовательного счета47.
48.
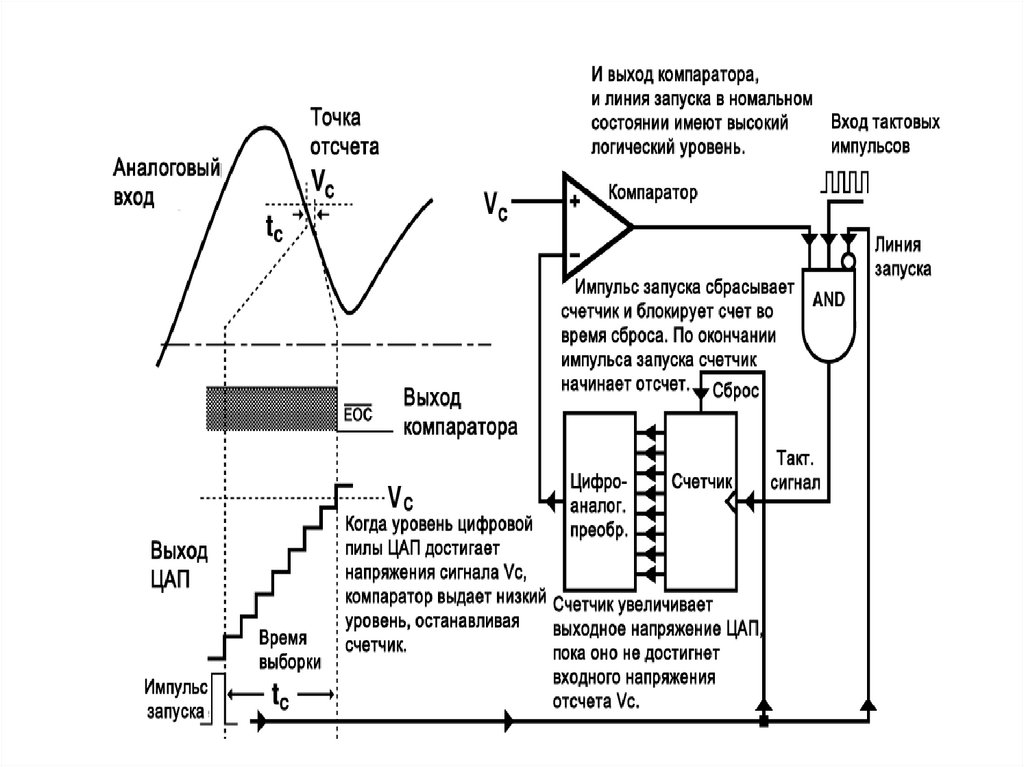
Работа преобразователя начинается с прихода импульсазапуска, который включает счетчик, суммирующий число
импульсов, поступающих от генератора тактовых импульсов
ГТИ.
Выходной код счетчика подается на ЦАП, осуществляющий
его преобразование в напряжение обратной связи Uос. Процесс
преобразования продолжается до тех пор, пока напряжение
обратной связи сравняется со входным напряжением и
переключится компаратор, который своим выходным сигналом
прекратит поступление тактовых импульсов на счетчик.
Переход выхода компаратора из 1 в 0 означает завершение
процесса преобразования. Выходной код, пропорциональный
входному напряжению в момент окончания преобразования,
считывается с выхода счетчика.
49.
Время преобразования АЦП этого типа являетсяпеременным и определяется входным напряжением. Его
максимальное значение соответствует максимальному входному
напряжению и при разрядности двоичного счетчика N и частоте
тактовых импульсов fтакт равно
tпр.макс=(2N-1)/ fтакт.
Например, при N=10 и fтакт=1 МГц tпр.макс=1024 мкс, что
обеспечивает максимальную частоту выборок порядка 1 кГц.
Статическая погрешность преобразования определяется
суммарной статической погрешностью используемых ЦАП и
компаратора.
Частоту счетных импульсов необходимо выбирать с учетом
завершения переходных процессов в них.
50.
Особенностью АЦП последовательного счета являетсянебольшая частота дискретизации, достигающая нескольких
килогерц.
Достоинством АЦП данного класса является сравнительная
простота
построения,
определяемая
последовательным
характером выполнения процесса преобразования.
51.
АЦП последовательногоприближения
АЦП с поразрядным уравновешиванием, является наиболее
распространенным
вариантом
последовательных
АЦП.
В основе работы этого класса преобразователей лежит
принцип дихотомии, т.е. последовательного сравнения
измеряемой величины с 1/2, 1/4, 1/8 и т.д. от возможного
максимального значения ее.
Это позволяет для N-разрядного АЦП последовательного
приближения выполнить весь процесс преобразования за N
последовательных шагов (итераций) вместо 2N-1 при
использовании
последовательного
счета
и
получить
существенный выигрыш в быстродействии. Так, уже при N=10
этот выигрыш достигает 100 раз и позволяет получить с
помощью таких АЦП до 105...106 преобразований в секунду.
52.
53.
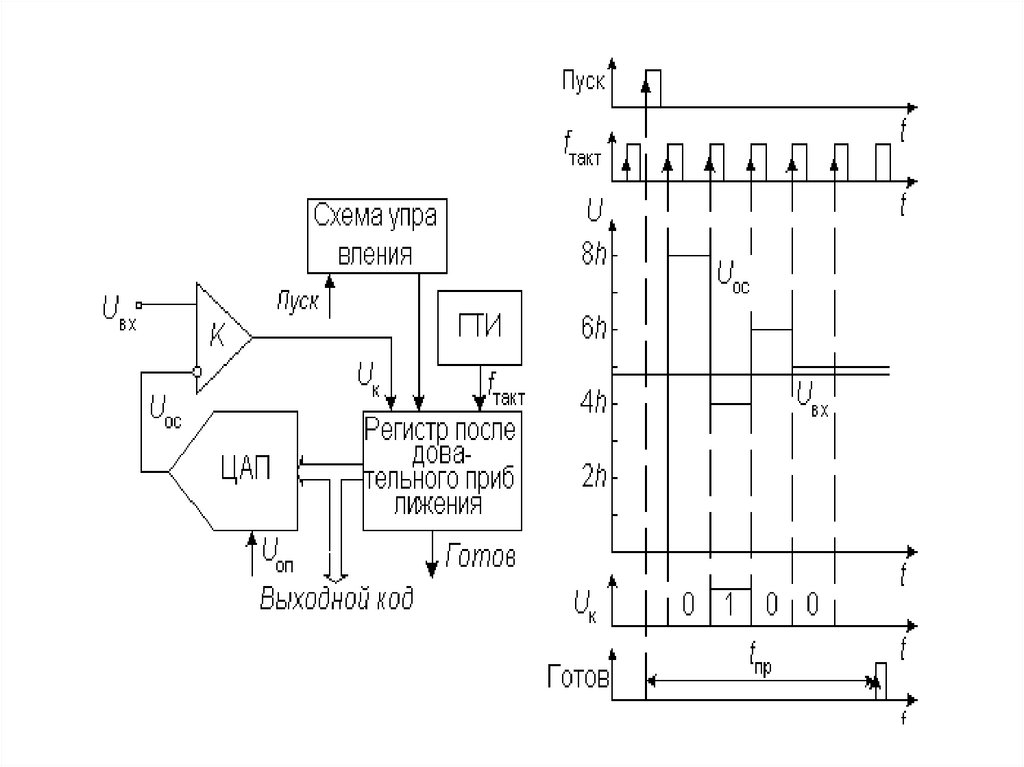
После подачи команды "Пуск" с приходом первого тактовогоимпульса РПП принудительно задает на вход ЦАП код, равный
половине его шкалы.
Если входное напряжение больше, чем эта величина, то на
выходе компаратора устанавливается 1, если меньше, то 0. В
этом последнем случае схема управления должна переключить
старший разряд обратно в состояние нуля.
После подобных выравнивающих шагов в регистре
последовательного приближения оказывается двоичное число, из
которого после цифро-аналогового преобразования получается
напряжение, соответствующее Uвх.
Данный класс АЦП занимает промежуточное положение по
быстродействию, стоимости и разрешающей способности между
последовательно-параллельными и интегрирующими АЦП и
находит широкое применение в системах управления, контроля и
цифровой обработки сигналов.
54.
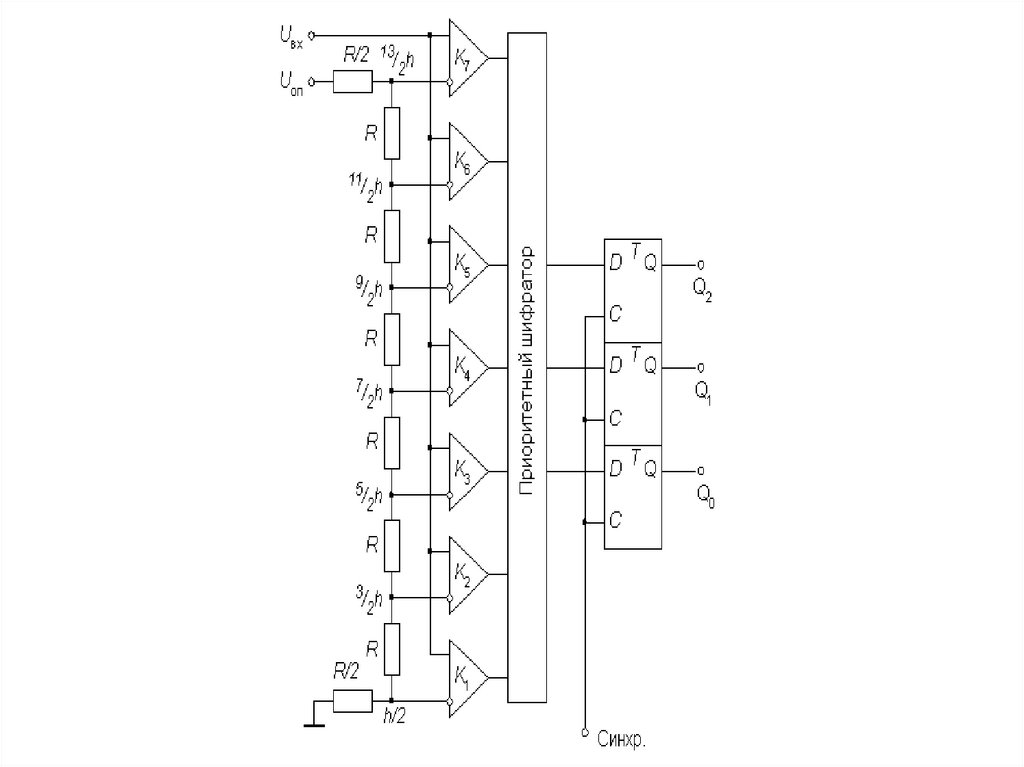
Параллельные АЦПАЦП этого типа осуществляют квантование сигнала
одновременно с помощью набора компараторов, включенных
параллельно источнику входного сигнала.
С помощью трех двоичных разрядов можно представить
восемь различных чисел, включая нуль. Необходимо,
следовательно, семь компараторов. Семь соответствующих
эквидистантных опорных напряжений образуются с помощью
резистивного
делителя.
Если приложенное входное напряжение не выходит за пределы
диапазона от 5/2h, до 7/2h, где h=Uоп/7 - квант входного
напряжения, соответствующий единице младшего разряда АЦП,
то компараторы с 1-го по 3-й устанавливаются в состояние 1, а
компараторы с 4-го по 7-й - в состояние 0. Преобразование этой
группы кодов в трехзначное двоичное число выполняет
логическое устройство, называемое приоритетным шифратором.
55.
56.
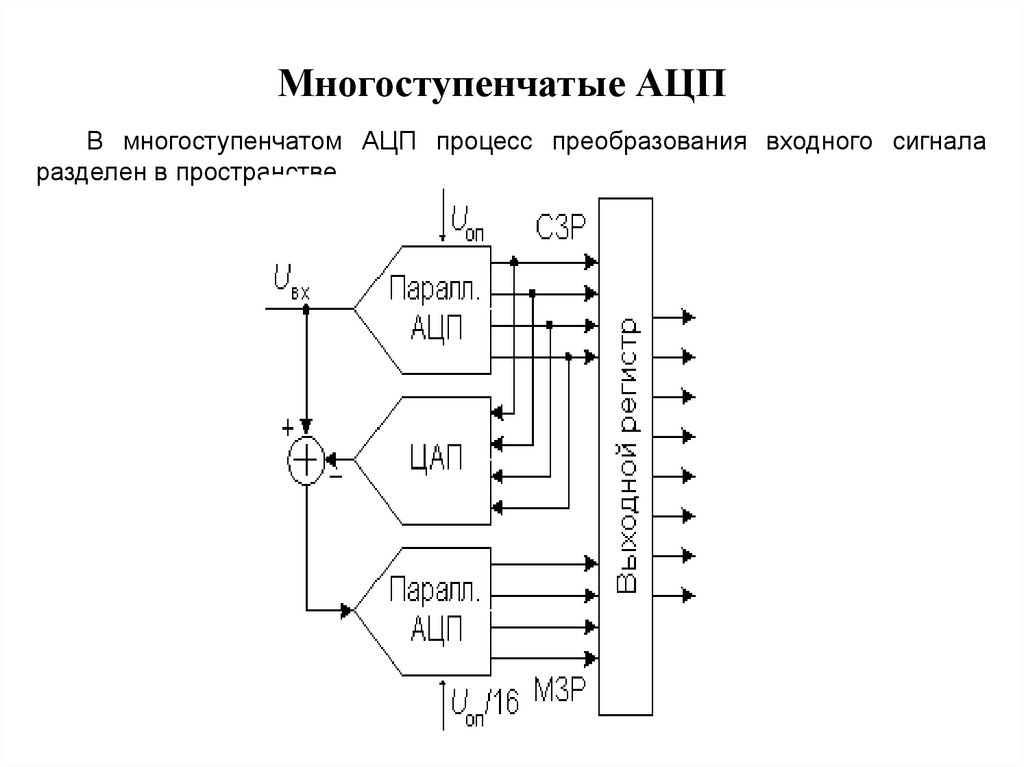
Многоступенчатые АЦПВ многоступенчатом АЦП процесс преобразования входного сигнала
разделен в пространстве.
57.
Верхний по схеме АЦП осуществляет грубое преобразованиесигнала в четыре старших разряда выходного кода. Цифровые
сигналы с выхода АЦП поступают на выходной регистр и
одновременно на вход 4-разрядного быстродействующего ЦАП.
Остаток от вычитания выходного напряжения ЦАП из
входного напряжения схемы поступает на вход АЦП2, опорное
напряжение которого в 16 раз меньше, чем у АЦП1. Как
следствие, квант АЦП2 в 16 раз меньше кванта АЦП1. Этот
остаток, преобразованный АЦП2 в цифровую форму
представляет собой четыре младших разряда выходного кода.
Различие между АЦП1 и АЦП2 заключается прежде всего в
требовании к точности: у АЦП1 точность должна быть такой же
как у 8-разрядного преобразователя, в то время как АЦП2 может
иметь точность 4-разрядного.