
 Информатика
ИнформатикаПохожие презентации:






")



Кибернетический и синергический подходы
1.
Системный анализ и управлениеинформацией
Лекция 4
Кибернетический и
синергический подходы
Составитель: старший преподаватель кафедры
АСОИУ
Урманцева Нелли Руслановна
2.
1. ОСНОВНЫЕ СВОЙСТВА И СПОСОБЫ ПРЕДСТАВЛЕНИЯ СИСТЕМОсновными свойствами систем являются:
1. Целостность.
2. Открытость.
3. Взаимодействие.
4. Неоднородность. Иерархичность.
5. Динамичность.
6. Целеустремленность.
7. Оптимальность.
8. Адаптация.
9. Самоорганизация.
Система может быть представлена разными способами:
1. Множественным (система рассматривается как некоторое множество
объектов).
2. Иерархическим (когда выделены структурные уровни представления
подсистем).
3. Целостным (рассматривается вся система в целом).
4. Функциональным (система рассматривается как некоторое множество
функций для достижения определенной цели либо множества целей).
5. Процессуальным (систему можно рассматривать как совокупность
некоторых состояний объекта, сменяющих друг друга во времени.
1
3.
ОБЩИЕ ПРЕДПОЛОЖЕНИЯ О ХАРАКТЕРЕ ФУНКЦИОНИРОВАНИЯ СИСТЕМДля получения
математической модели процесса функционирования системы, охватывающей
достаточно широкий класс реальных объектов в общей теории систем, исходят из следующих общих
предположений:
1. система функционирует во времени и в каждый момент времени система может находиться в одном
из возможных состояний;
2. на вход системы могут подаваться входные сигналы;
3. система способна выдавать входные сигналы;
4. состояние системы определяется предыдущими состояниями
и выходными сигналами ,
поступившими в данный момент времени
и ранее;
5. выходной сигнал определяется состоянием системы и входными сигналами в в данным момент
времени и предыдущими моментами времени;
6. состояние системы определяется предыдущими состояниями и выходными
сигналами в данный момент времени, предыдущими моментами времени.
1 - отражает динамических характер процесса функционирования системы в пространстве и времени
(процесс функционирования протекает как последовательная смена состояний системы под действием
внешних и внутренних причин);
2,3 – отражают взаимодействие системы с внешней средой;
4,5 - отражают реакцию системы на внутренние факторы и воздействие внешней среды,
последействие и принцип физической реализуемости системы;
4,5,6 – отражают принципы физической реализуемости систем.
2
4.
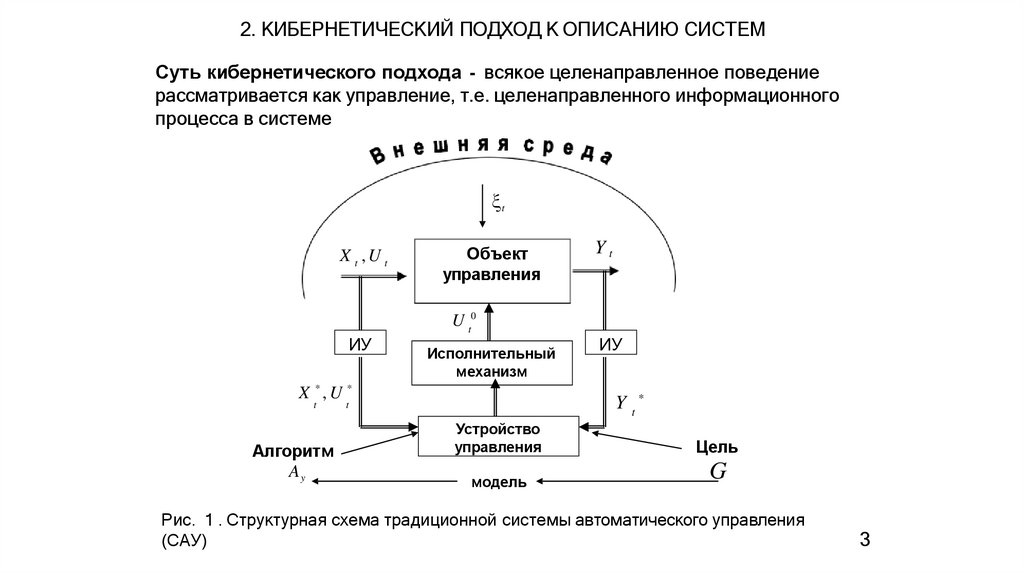
2. КИБЕРНЕТИЧЕСКИЙ ПОДХОД К ОПИСАНИЮ СИСТЕМСуть кибернетического подхода - всякое целенаправленное поведение
рассматривается как управление, т.е. целенаправленного информационного
процесса в системе
t
X t ,U t
ИУ
Объект
управления
U t0
Исполнительный
механизм
X *,U *
t
Алгоритм
Ay
Yt
ИУ
Y t*
t
Устройство
управления
Цель
модель
G
Рис. 1 . Структурная схема традиционной системы автоматического управления
(САУ)
3
5.
КИБЕРНЕТИЧЕСКИЙ ПОДХОД К ОПИСАНИЮ СИСТЕМG, A ( U)
Система обратных связей 1
v0
vx
Управляющая
подсистема
(ЛПР,ОРУ)
U, X
Объект
управления
Y
F
1. Планирование.
2. Прогнозирование.
3. Оперативное
управление.
4. Контроль.
5. Принятие решений.
Y*
База данных и
знаний
Z
Объекты –
аналоги
V
{F}
Идентификация,
адаптация модел
ей
F0 ,{F0 }
va
Система обратных связей 2
Обучение, накопление опыта и знаний (интеграция информации)
Рис. 2. Структурная схема современной автоматизированной системы управления
(с двумя системами обратных связей)
4
6.
КИБЕРНЕТИЧЕСКИЙ ПОДХОД К ОПИСАНИЮ СИСТЕМАтрибуты системы управления:
1. Функции и цикл управления.
2. Управляющая подсистема (субъект управления). Цель (цели) управления.
3. Объект управления и объекты аналоги.
4. Показатели качества и эффективности.
5. Критерий (принцип) оптимальности.
6. Алгоритм управления и принятия решений.
7. Процесс управления.
5
7.
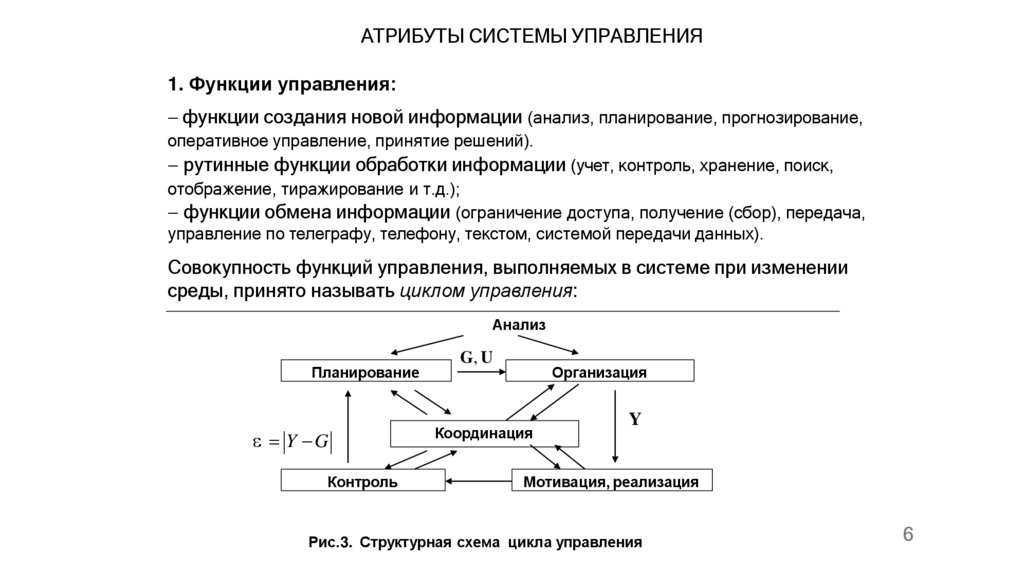
АТРИБУТЫ СИСТЕМЫ УПРАВЛЕНИЯ1. Функции управления:
функции создания новой информации (анализ, планирование, прогнозирование,
оперативное управление, принятие решений).
рутинные функции обработки информации (учет, контроль, хранение, поиск,
отображение, тиражирование и т.д.);
функции обмена информации (ограничение доступа, получение (сбор), передача,
управление по телеграфу, телефону, текстом, системой передачи данных).
Совокупность функций управления, выполняемых в системе при изменении
среды, принято называть циклом управления:
Анализ
Планирование
Y G
Контроль
G, U
Организация
Координация
Y
Мотивация, реализация
Рис.3. Структурная схема цикла управления
6
8.
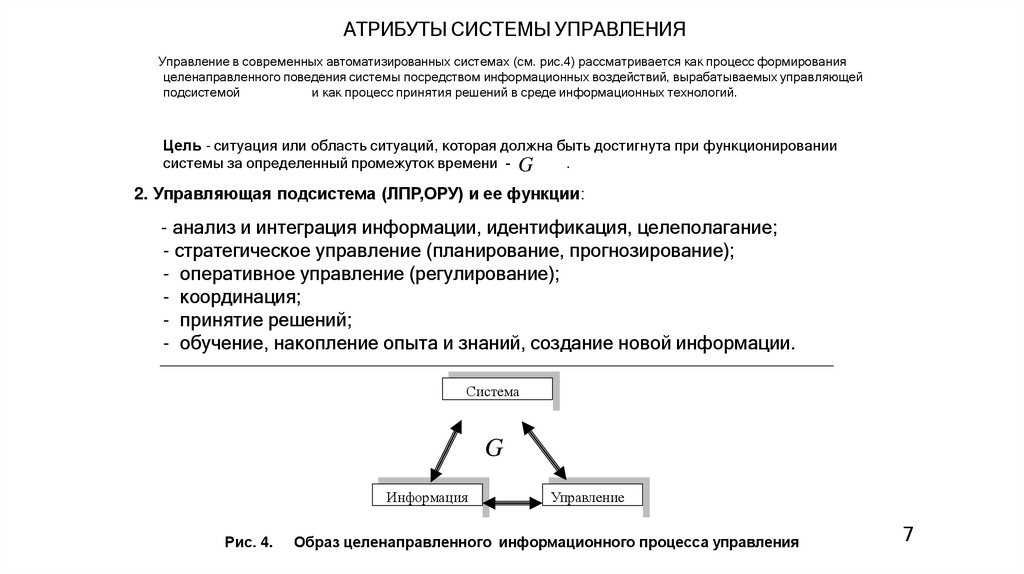
АТРИБУТЫ СИСТЕМЫ УПРАВЛЕНИЯУправление в современных автоматизированных системах (см. рис.4) рассматривается как процесс формирования
целенаправленного поведения системы посредством информационных воздействий, вырабатываемых управляющей
подсистемой
и как процесс принятия решений в среде информационных технологий.
Цель - ситуация или область ситуаций, которая должна быть достигнута при функционировании
системы за определенный промежуток времени - G
.
2. Управляющая подсистема (ЛПР,ОРУ) и ее функции:
- анализ и интеграция информации, идентификация, целеполагание;
- стратегическое управление (планирование, прогнозирование);
- оперативное управление (регулирование);
- координация;
- принятие решений;
- обучение, накопление опыта и знаний, создание новой информации.
Система
G
Информация
Рис. 4.
Управление
Образ целенаправленного информационного процесса управления
7
9.
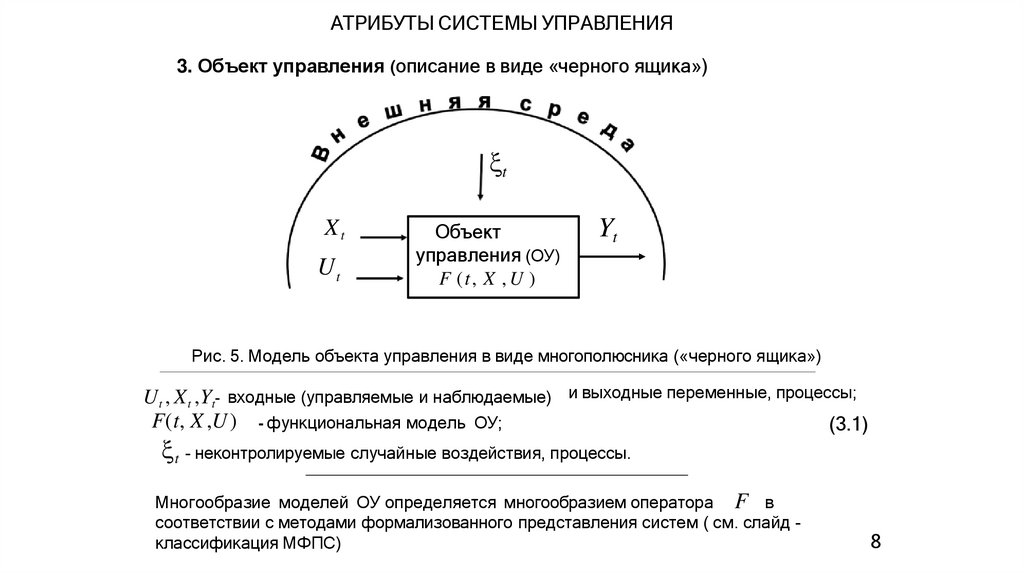
АТРИБУТЫ СИСТЕМЫ УПРАВЛЕНИЯ3. Объект управления (описание в виде «черного ящика»)
t
Xt
Ut
Объект
управления (ОУ)
F (t, X , U )
Yt
Рис. 5. Модель объекта управления в виде многополюсника («черного ящика»)
U t , X t ,Yt- входные (управляемые и наблюдаемые) и выходные переменные, процессы;
F(t, X ,U ) - функциональная модель ОУ;
(3.1)
t - неконтролируемые случайные воздействия, процессы.
Многообразие моделей ОУ определяется многообразием оператора F в
соответствии с методами формализованного представления систем ( см. слайд классификация МФПС)
8
10.
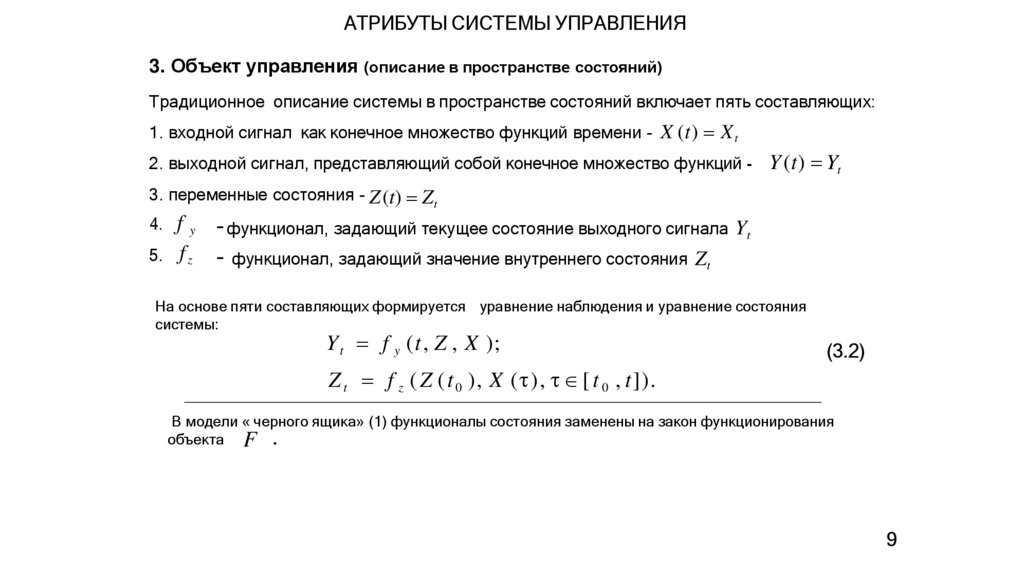
АТРИБУТЫ СИСТЕМЫ УПРАВЛЕНИЯ3. Объект управления (описание в пространстве состояний)
Традиционное описание системы в пространстве состояний включает пять составляющих:
1. входной сигнал как конечное множество функций времени - X (t) X t
2. выходной сигнал, представляющий собой конечное множество функций -
Y (t) Yt
3. переменные состояния - Z (t) Zt
4.
f y - функционал, задающий текущее состояние выходного сигнала Yt
5. f z - функционал, задающий значение внутреннего состояния Z t
На основе пяти составляющих формируется уравнение наблюдения и уравнение состояния
системы:
Y t f y (t, Z , X );
(3.2)
Z t f z ( Z (t 0 ), X ( ), [ t 0 , t]).
В модели « черного ящика» (1) функционалы состояния заменены на закон функционирования
объекта F .
9
11.
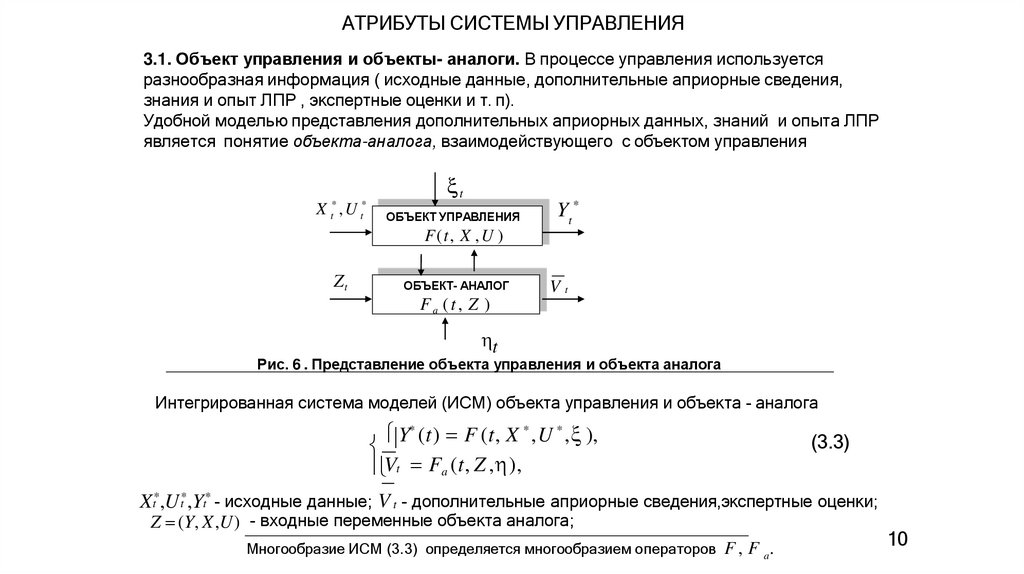
АТРИБУТЫ СИСТЕМЫ УПРАВЛЕНИЯ3.1. Объект управления и объекты- аналоги. В процессе управления используется
разнообразная информация ( исходные данные, дополнительные априорные сведения,
знания и опыт ЛПР , экспертные оценки и т. п).
Удобной моделью представления дополнительных априорных данных, знаний и опыта ЛПР
является понятие объекта-аналога, взаимодействующего с объектом управления
t
*
t
X ,U
*
t
ОБЪЕКТ УПРАВЛЕНИЯ
Yt *
F(t, X , U )
Zt
ОБЪЕКТ- АНАЛОГ
Vt
Fa (t, Z )
t
Рис. 6 . Представление объекта управления и объекта аналога
Интегрированная система моделей (ИСМ) объекта управления и объекта - аналога
Y* (t) F (t, X * ,U * , ),
Vt Fa (t, Z , ),
(3.3)
Xt*,U t*,Yt* - исходные данные; V t - дополнительные априорные сведения,экспертные оценки;
Z (Y, X,U) - входные переменные объекта аналога;
Многообразие ИСМ (3.3) определяется многообразием операторов F , F a .
10
12.
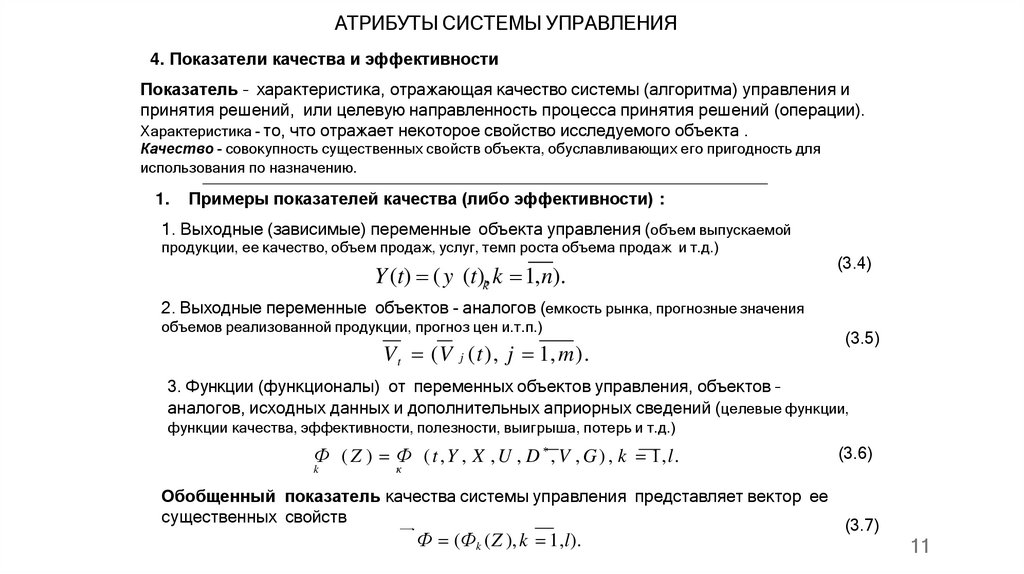
АТРИБУТЫ СИСТЕМЫ УПРАВЛЕНИЯ4. Показатели качества и эффективности
Показатель – характеристика, отражающая качество системы (алгоритма) управления и
принятия решений, или целевую направленность процесса принятия решений (операции).
Характеристика - то, что отражает некоторое свойство исследуемого объекта .
Качество - совокупность существенных свойств объекта, обуславливающих его пригодность для
использования по назначению.
1.
Примеры показателей качества (либо эффективности) :
1. Выходные (зависимые) переменные объекта управления (объем выпускаемой
продукции, ее качество, объем продаж, услуг, темп роста объема продаж и т.д.)
Y(t) ( y (t),k k 1,n).
(3.4)
2. Выходные переменные объектов - аналогов (емкость рынка, прогнозные значения
объемов реализованной продукции, прогноз цен и.т.п.)
V t (V j (t), j 1, m).
(3.5)
3. Функции (функционалы) от переменных объектов управления, объектов –
аналогов, исходных данных и дополнительных априорных сведений (целевые функции,
функции качества, эффективности, полезности, выигрыша, потерь и т.д.)
Ф ( Z ) Ф ( t , Y , X , U , D * , V , G ) , k 1,l.
k
к
(3.6)
Обобщенный показатель качества системы управления представляет вектор ее
существенных свойств
(3.7)
Ф (Фk (Z ), k 1,l).
11
13.
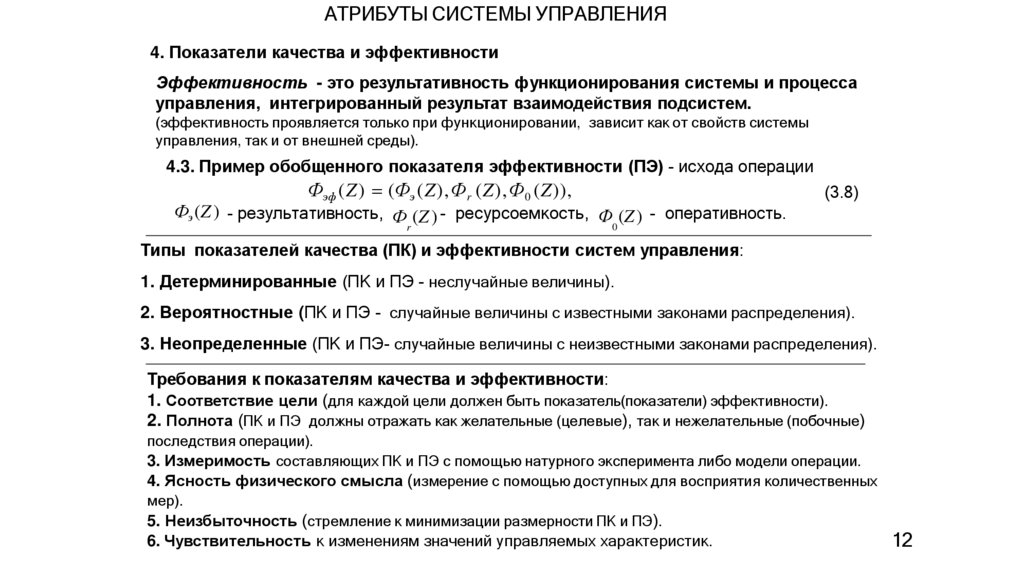
АТРИБУТЫ СИСТЕМЫ УПРАВЛЕНИЯ4. Показатели качества и эффективности
Эффективность - это результативность функционирования системы и процесса
управления, интегрированный результат взаимодействия подсистем.
(эффективность проявляется только при функционировании, зависит как от свойств системы
управления, так и от внешней среды).
4.3. Пример обобщенного показателя эффективности (ПЭ) - исхода операции
Фэф (Z) (Фэ (Z),Ф r (Z),Ф 0 (Z)),
Фэ (Z ) - результативность, Ф (Z ) - ресурсоемкость, Ф (Z) - оперативность.
0
r
(3.8)
Типы показателей качества (ПК) и эффективности систем управления:
1. Детерминированные (ПК и ПЭ - неслучайные величины).
2. Вероятностные (ПК и ПЭ - случайные величины с известными законами распределения).
3. Неопределенные (ПК и ПЭ- случайные величины с неизвестными законами распределения).
Требования к показателям качества и эффективности:
1. Соответствие цели (для каждой цели должен быть показатель(показатели) эффективности).
2. Полнота (ПК и ПЭ должны отражать как желательные (целевые), так и нежелательные (побочные)
последствия операции).
3. Измеримость составляющих ПК и ПЭ с помощью натурного эксперимента либо модели операции.
4. Ясность физического смысла (измерение с помощью доступных для восприятия количественных
мер).
5. Неизбыточность (стремление к минимизации размерности ПК и ПЭ).
6. Чувствительность к изменениям значений управляемых характеристик.
12
14.
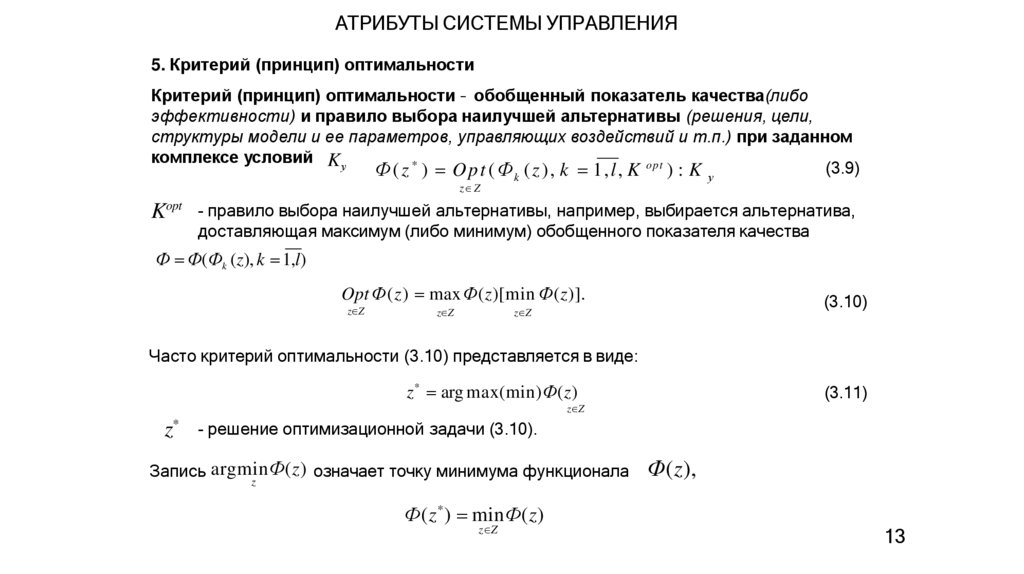
АТРИБУТЫ СИСТЕМЫ УПРАВЛЕНИЯ5. Критерий (принцип) оптимальности
Критерий (принцип) оптимальности – обобщенный показатель качества(либо
эффективности) и правило выбора наилучшей альтернативы (решения, цели,
структуры модели и ее параметров, управляющих воздействий и т.п.) при заданном
комплексе условий K у
(3.9)
Ф ( z * ) O p t ( Ф k (z), k 1,l, K opt ) : K у
z Z
Kopt
- правило выбора наилучшей альтернативы, например, выбирается альтернатива,
доставляющая максимум (либо минимум) обобщенного показателя качества
Ф Ф(Фk (z), k 1,l)
Opt Ф(z) maxФ(z)[min Ф(z)].
z Z
(3.10)
z Z
z Z
Часто критерий оптимальности (3.10) представляется в виде:
z* arg max(min)Ф(z)
(3.11)
z Z
z*
- решение оптимизационной задачи (3.10).
Запись argminФ(z) означает точку минимума функционала
z
Ф(z),
Ф(z * ) minФ(z)
z Z
13
15.
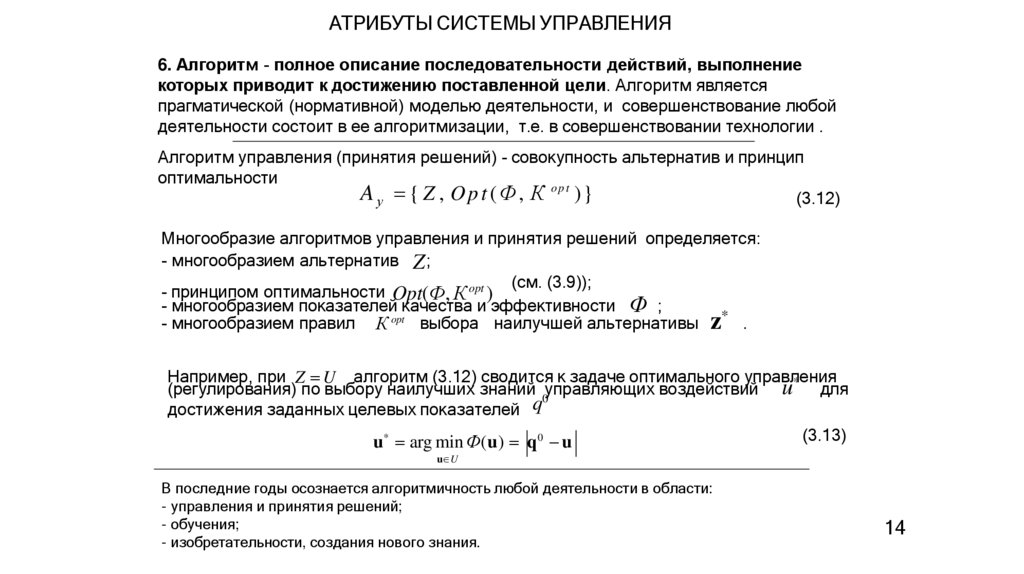
АТРИБУТЫ СИСТЕМЫ УПРАВЛЕНИЯ6. Алгоритм - полное описание последовательности действий, выполнение
которых приводит к достижению поставленной цели. Алгоритм является
прагматической (нормативной) моделью деятельности, и совершенствование любой
деятельности состоит в ее алгоритмизации, т.е. в совершенствовании технологии .
Алгоритм управления (принятия решений) - совокупность альтернатив и принцип
оптимальности
A у { Z , O p t ( Ф , К o p t )}
(3.12)
Многообразие алгоритмов управления и принятия решений определяется:
- многообразием альтернатив Z ;
(см. (3.9));
- принципом оптимальности Opt(Ф, К opt )
- многообразием показателей качества и эффективности Ф ;
*
- многообразием правил К opt выбора наилучшей альтернативы z .
Например, при Z U алгоритм (3.12) сводится к задаче оптимального управления
*
(регулирования) по выбору наилучших знаний 0управляющих воздействий u
для
достижения заданных целевых показателей q
u* arg min Ф(u) q 0 u
(3.13)
u U
В последние годы осознается алгоритмичность любой деятельности в области:
- управления и принятия решений;
- обучения;
- изобретательности, создания нового знания.
14
16.
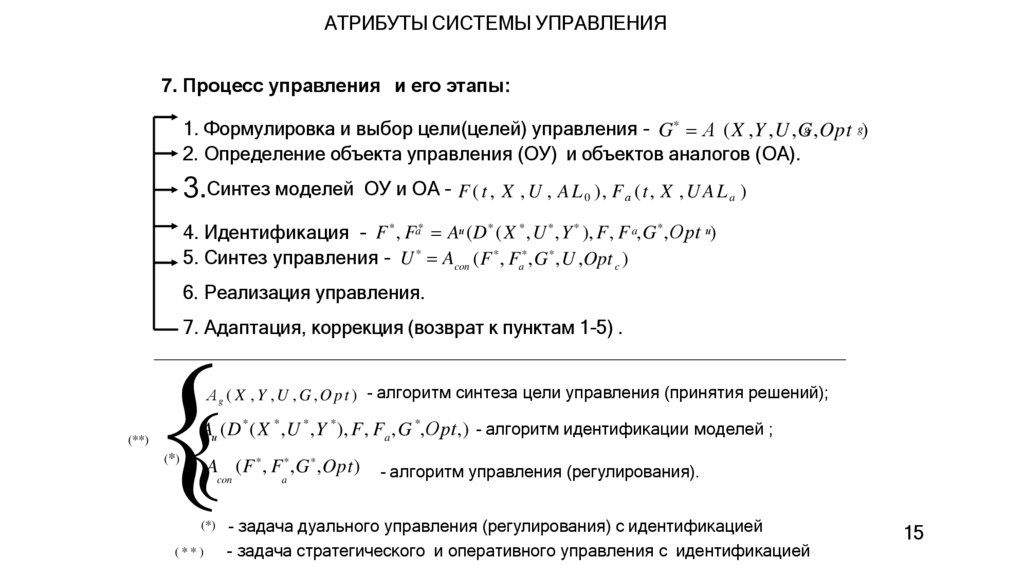
АТРИБУТЫ СИСТЕМЫ УПРАВЛЕНИЯ7. Процесс управления и его этапы:
g)
g
1. Формулировка и выбор цели(целей) управления - G * А (X ,Y ,U ,G,Opt
2. Определение объекта управления (ОУ) и объектов аналогов (ОА).
3.Синтез моделей ОУ и ОА - F ( t , X , U , A L ), F (t, X , U A L )
0
а
a
4. Идентификация - F * , Fa* Aи (D * (X * ,U * ,Y * ), F, F a,G * ,Орt и)
5. Синтез управления - U * Acon (F * , Fa* ,G * ,U ,Opt c )
6. Реализация управления.
7. Адаптация, коррекция (возврат к пунктам 1-5) .
А g ( X , Y , U , G , O p t ) - алгоритм синтеза цели управления (принятия решений);
(**)
Aи (D * (X * ,U * ,Y * ), F, Fa ,G *,Орt,) - алгоритм идентификации моделей ;
(*)
A (F * , F * ,G * ,Opt)
con
(*)
(**)
a
- алгоритм управления (регулирования).
- задача дуального управления (регулирования) с идентификацией
- задача стратегического и оперативного управления с идентификацией
15
17.
3. СИНЕРГЕТИЧЕСКИЙ ПОДХОД К ОПИСАНИЮ СЛОЖНЫХ СИСТЕМАтрибуты синергетического подхода :
1. Сложные динамические системы и модели.
2. Самоорганизация.
3. Эволюция сложных систем.
4. Бифуркация.
5. Аттрактор.
Термин синергетика («совместное действие») или теория самоорганизации впервые
ввел Герман Хакен( 1978 г.), вкладывая в него два смысла:
- возникновение новых свойств у целого, состоящего из взаимодействующих объектов;
- подход, требующий для своей разработки сотрудничество специалистов из разных
областей.
Синергетика - новая интегральная наука (концепция), изучающая процессы
самоорганизации, возникающие в открытых системах, обменивающихся с внешней
средой энергией, веществом и информацией.
Синергетика - наука о том, как создавать модели (и не только как их исследовать и
решать), используя новые свойства систем.
16
18.
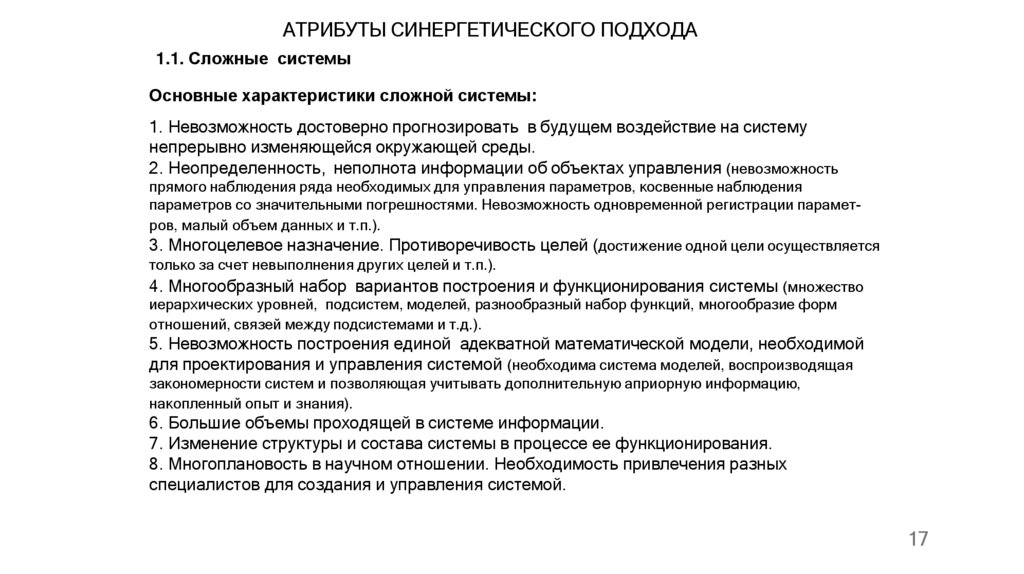
АТРИБУТЫ СИНЕРГЕТИЧЕСКОГО ПОДХОДА1.1. Сложные системы
Основные характеристики сложной системы:
1. Невозможность достоверно прогнозировать в будущем воздействие на систему
непрерывно изменяющейся окружающей среды.
2. Неопределенность, неполнота информации об объектах управления (невозможность
прямого наблюдения ряда необходимых для управления параметров, косвенные наблюдения
параметров со значительными погрешностями. Невозможность одновременной регистрации параметров, малый объем данных и т.п.).
3. Многоцелевое назначение. Противоречивость целей (достижение одной цели осуществляется
только за счет невыполнения других целей и т.п.).
4. Многообразный набор вариантов построения и функционирования системы (множество
иерархических уровней, подсистем, моделей, разнообразный набор функций, многообразие форм
отношений, связей между подсистемами и т.д.).
5. Невозможность построения единой адекватной математической модели, необходимой
для проектирования и управления системой (необходимa система моделей, воспроизводящая
закономерности систем и позволяющая учитывать дополнительную априорную информацию,
накопленный опыт и знания).
6. Большие объемы проходящей в системе информации.
7. Изменение структуры и состава системы в процессе ее функционирования.
8. Многоплановость в научном отношении. Необходимость привлечения разных
специалистов для создания и управления системой.
17
19.
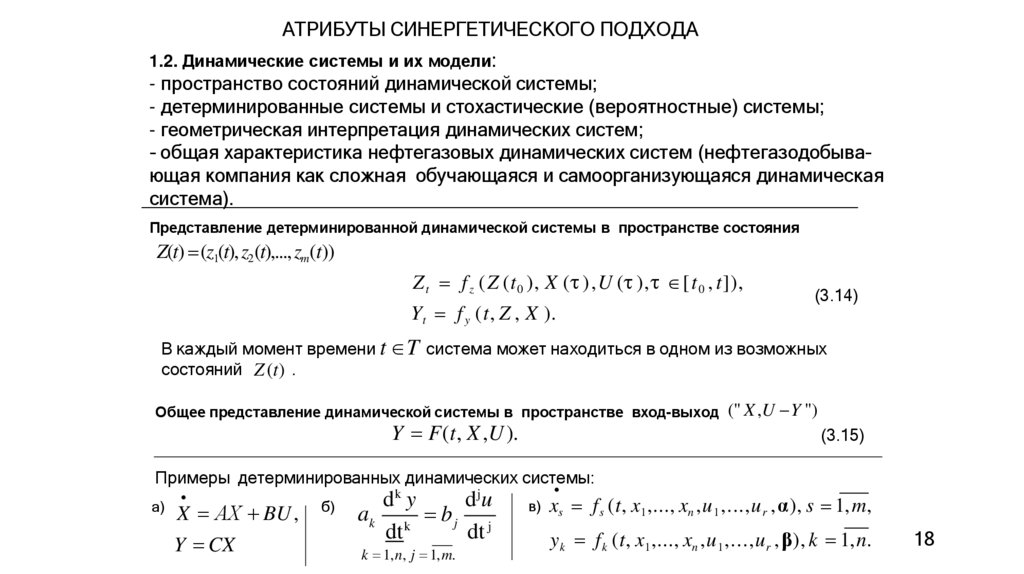
АТРИБУТЫ СИНЕРГЕТИЧЕСКОГО ПОДХОДА1.2. Динамические системы и их модели:
- пространство состояний динамической системы;
- детерминированные системы и стохастические (вероятностные) системы;
- геометрическая интерпретация динамических систем;
- общая характеристика нефтегазовых динамических систем (нефтегазодобывающая компания как сложная обучающаяся и самоорганизующаяся динамическая
система).
Представление детерминированной динамической системы в пространстве состояния
Z(t) (z1(t),z2(t),..., zm(t))
Z t f z (Z (t 0 ), X ( ),U ( ), [t 0 , t]),
Yt f y (t, Z , X ).
(3.14)
В каждый момент времени t T система может находиться в одном из возможных
состояний Z (t) .
Общее представление динамической системы в пространстве вход-выход (" X ,U Y ")
Y F(t, X ,U ).
(3.15)
Примеры детерминированных динамических системы:
a)
X АX BU ,
Y CX
б)
dk y
dju
ak k b j j
dt
dt
k 1,n, j 1,m.
в) xs f s (t, x 1 ,..., xn ,u 1 ,...,u r ,α), s 1,m,
yk f k (t, x1,..., xn ,u 1 ,...,u r ,β), k 1,n.
18
20.
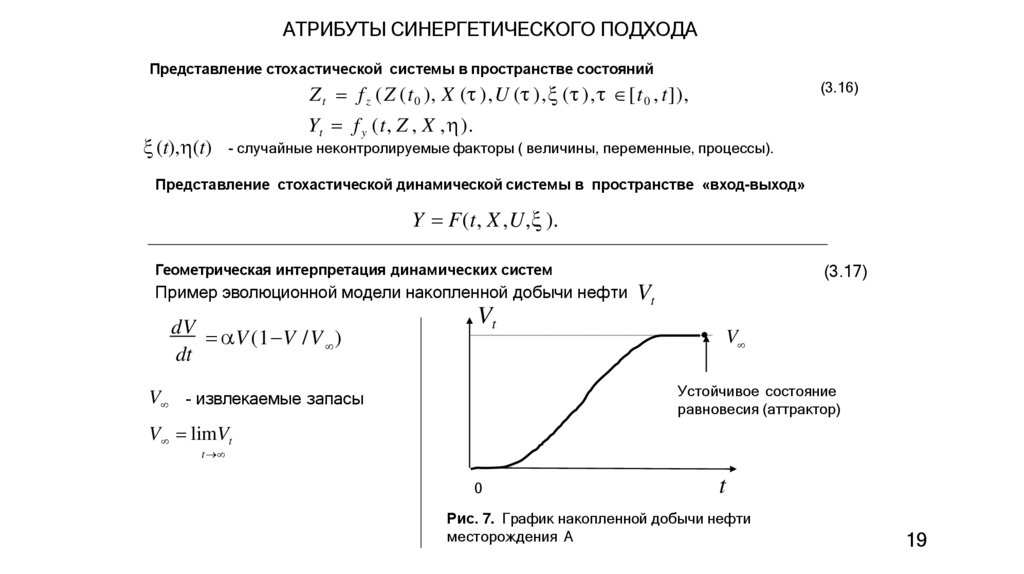
АТРИБУТЫ СИНЕРГЕТИЧЕСКОГО ПОДХОДАПредставление стохастической системы в пространстве состояний
(3.16)
Z t f z (Z (t 0 ), X ( ),U ( ), ( ), [t 0 , t]),
(t), (t)
Yt f y (t, Z , X , ).
- случайные неконтролируемые факторы ( величины, переменные, процессы).
Представление стохастической динамической системы в пространстве «вход-выход»
Y F(t, X ,U, ).
Геометрическая интерпретация динамических систем
(3.17)
Пример эволюционной модели накопленной добычи нефти Vt
dV
V (1 V /V )
dt
Vt
V
Устойчивое состояние
равновесия (аттрактор)
V - извлекаемые запасы
V limVt
t
0
t
Рис. 7. График накопленной добычи нефти
месторождения А
19
21.
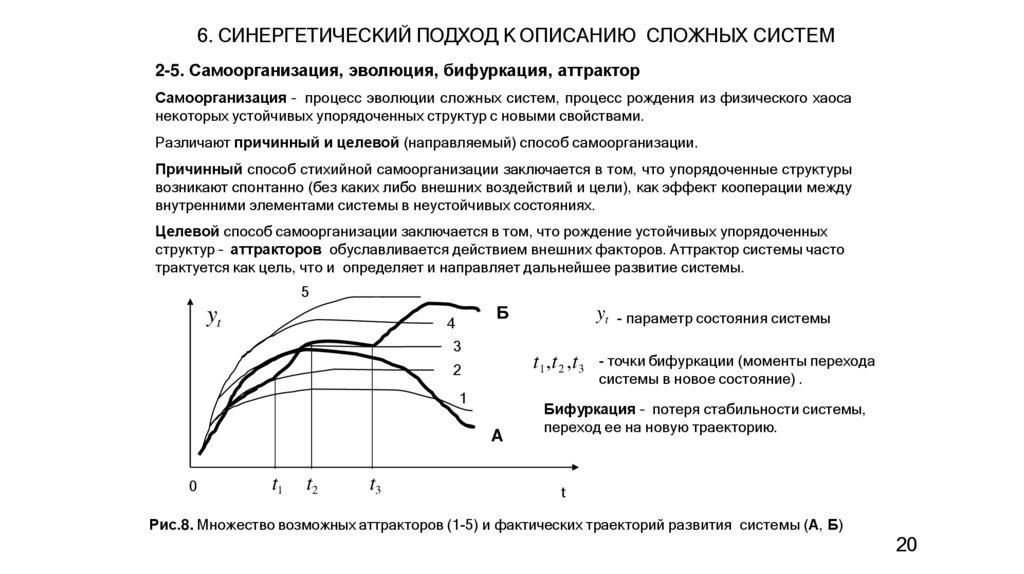
6. СИНЕРГЕТИЧЕСКИЙ ПОДХОД К ОПИСАНИЮ СЛОЖНЫХ СИСТЕМ2-5. Самоорганизация, эволюция, бифуркация, аттрактор
Самоорганизация – процесс эволюции сложных систем, процесс рождения из физического хаоса
некоторых устойчивых упорядоченных структур с новыми свойствами.
Различают причинный и целевой (направляемый) способ самоорганизации.
Причинный способ стихийной самоорганизации заключается в том, что упорядоченные структуры
возникают спонтанно (без каких либо внешних воздействий и цели), как эффект кооперации между
внутренними элементами системы в неустойчивых состояниях.
Целевой способ самоорганизации заключается в том, что рождение устойчивых упорядоченных
структур – аттракторов обуславливается действием внешних факторов. Аттрактор системы часто
трактуется как цель, что и определяет и направляет дальнейшее развитие системы.
5
yt
Б
4
3
t1 ,t2 ,t3 - точки бифуркации (моменты перехода
2
системы в новое состояние) .
1
A
0
t1
t2
t3
yt - параметр состояния системы
Бифуркация – потеря стабильности системы,
переход ее на новую траекторию.
t
Рис.8. Множество возможных аттракторов (1-5) и фактических траекторий развития системы (А, Б)
20
22.
Основная литература1. Волкова В.Н., Денисов А.А. Теория систем и системный анализ: учебник
для вузов.-М.: Издательство Юрайт; ИД Юрайт, 2010.- 679 с.
2. Коновалов В.И. Идентификация и диагностика систем.- Томск.- Изд-во ТПУ,
2006- 152 с.
3. Острейковский В.А. Теория систем: Учеб. для вузов.- М.: Высш. шк., 1997. 240 с.
4. Перегудов Ф.И., Тарасенко Ф.П. Основы системного анализа: Учеб.3-е изд.Томск:
Изд во НТЛ, 2001.-396 с.
5. Кориков А.М., Павлов С.Н. Теория систем и системный анализ: учеб.
пособие.- 2-е изд., доп. и перераб.- Томск: Томск гос. ун-т систем управления
и радиоэлектроники,2008.- 264 с.
6. Сергеев В.Л. Интегрированные системы идентификации. Томский
политехнический университет. – Томск: Изд-во Томского политехнического
университета, 2011. – 198 с.
21