



 Математика
МатематикаПохожие презентации:










Введение в задачи исследования и проектирования цифровых систем. Методы синтеза цифровых систем
1. Введение в задачи исследования и проектирования цифровых систем
Санкт-Петербургский государственный университетФакультет прикладной математики - процессов управления
Веремей Е.И.
Введение в задачи
исследования и проектирования
цифровых систем
Лекции 14 ─ 16
Раздел 3. Методы синтеза цифровых систем
2.
Методы синтеза цифровых систем1
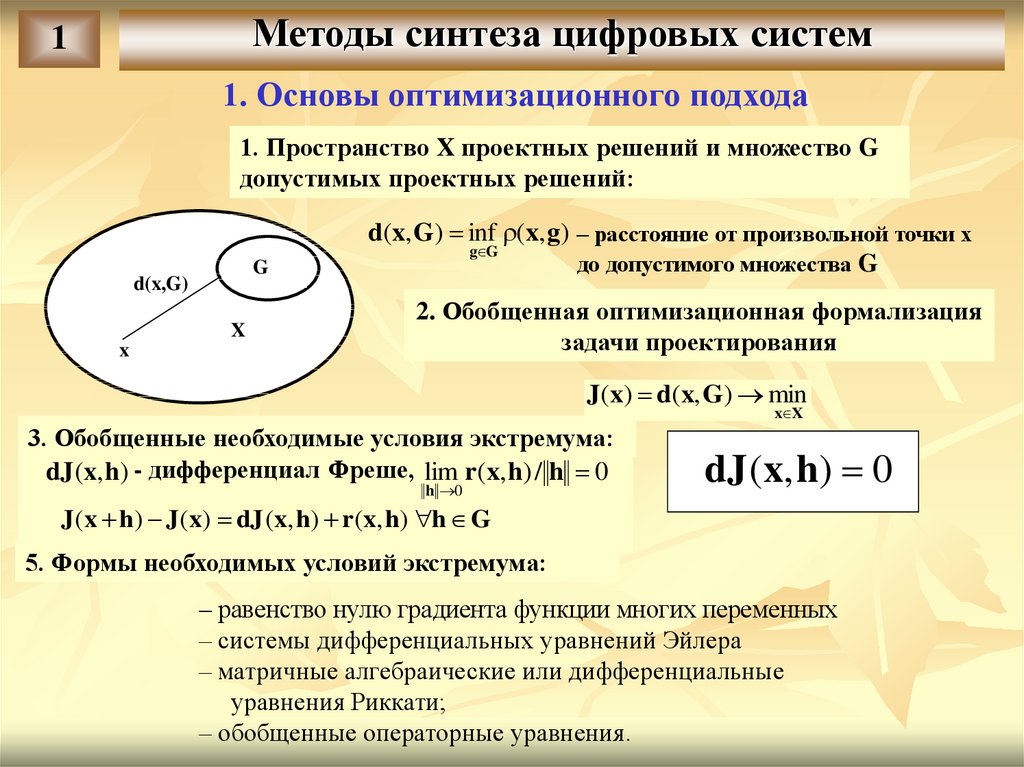
1. Основы оптимизационного подхода
1. Пространство X проектных решений и множество G
допустимых проектных решений:
G
d(x,G)
X
x
d(x, G) inf (x, g) – расстояние от произвольной точки x
g G
до допустимого множества G
2. Обобщенная оптимизационная формализация
задачи проектирования
J(x) d(x, G) min
x X
3. Обобщенные необходимые условия экстремума:
dJ (x, h) - дифференциал Фреше, lim r(x, h) / h 0
h 0
dJ (x, h) 0
J (x h) J (x) dJ (x, h) r (x, h) h G
5. Формы необходимых условий экстремума:
– равенство нулю градиента функции многих переменных
– системы дифференциальных уравнений Эйлера
– матричные алгебраические или дифференциальные
уравнения Риккати;
– обобщенные операторные уравнения.
3.
2Методы синтеза цифровых систем
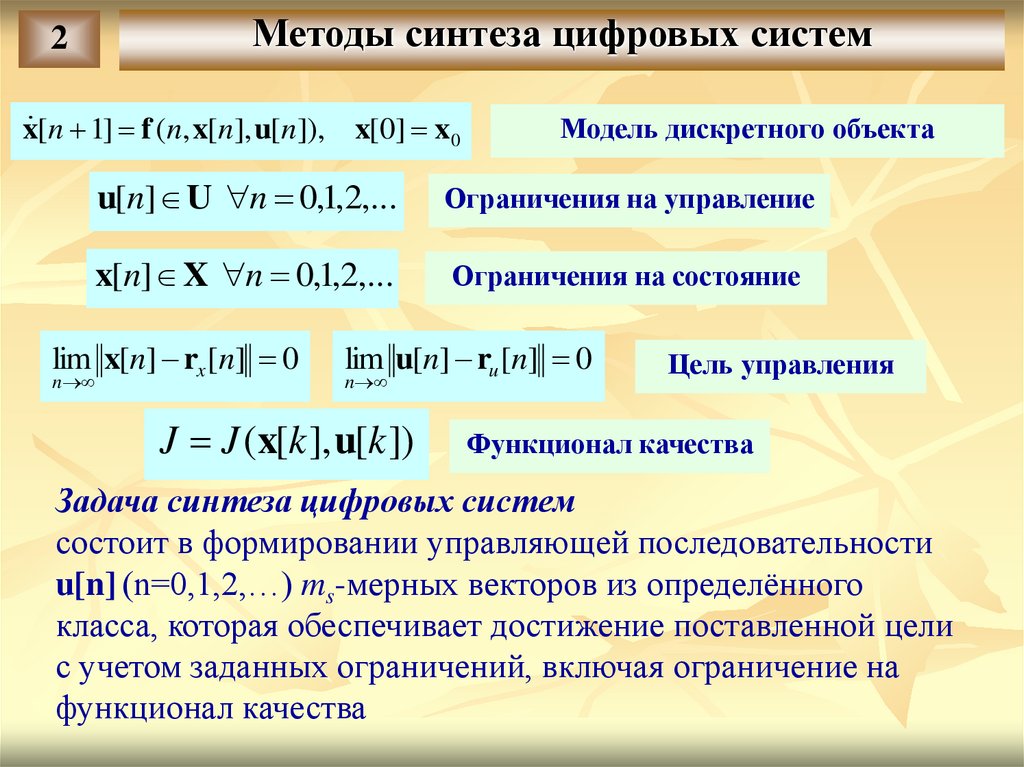
x [n 1] f (n, x[n], u[n]), x[0] x0
u[n] U n 0,1,2,...
Ограничения на управление
x[n] X n 0,1,2,...
Ограничения на состояние
lim x[n] rx [n] 0
n
Модель дискретного объекта
lim u[n] ru [n] 0
n
J J (x[k ], u[k ])
Цель управления
Функционал качества
Задача синтеза цифровых систем
состоит в формировании управляющей последовательности
u[n] (n=0,1,2,…) ms-мерных векторов из определённого
класса, которая обеспечивает достижение поставленной цели
с учетом заданных ограничений, включая ограничение на
функционал качества
4.
Методы синтеза цифровых систем3
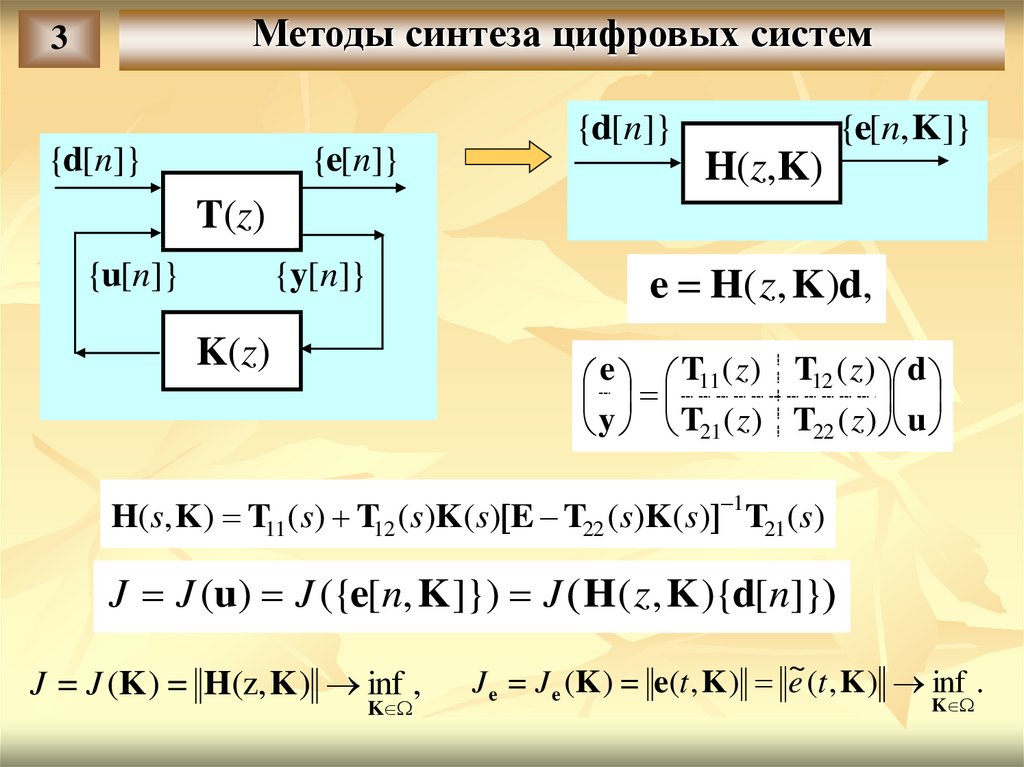
{e[n]}
{d[n]}
{d[n]}
{e[n, K]}
H(z,K)
T(z)
{u[n]}
{y[n]}
K(z)
e = H( z, K )d,
e T11 ( z ) T12 ( z ) d
y T21 ( z ) T22 ( z ) u
1
H(s, K) T11 (s) T12 (s)K(s) E T22 (s)K(s) T21 (s)
J J (u) J ({e[n, K ]}) J H( z, K ){d[n]}
J = J (K ) = H(z, K ) inf ,
K
J e = J e (K ) = e(t , K ) e~ (t , K ) inf .
K
5.
Методы синтеза цифровых систем4
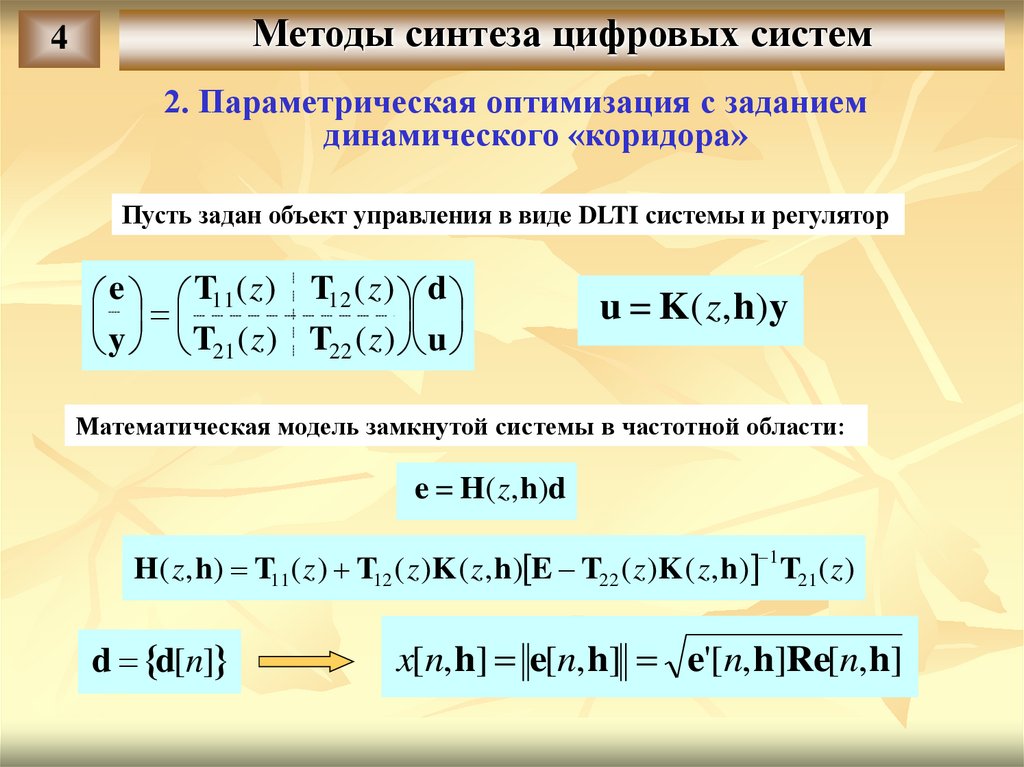
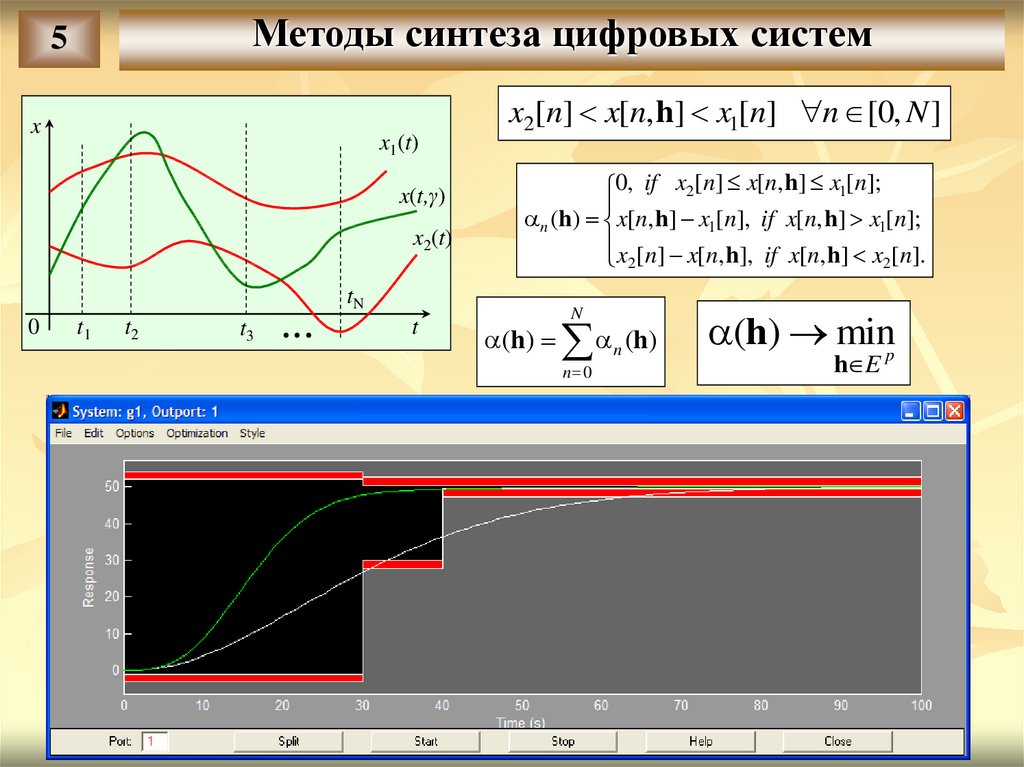
2. Параметрическая оптимизация с заданием
динамического «коридора»
Пусть задан объект управления в виде DLTI системы и регулятор
e T11 ( z ) T12 ( z ) d
y T21 ( z ) T22 ( z ) u
u = K ( z, h)y
Математическая модель замкнутой системы в частотной области:
e = H( z, h)d
H( z, h) T11( z ) T12 ( z )K ( z, h) E T22 ( z )K ( z, h) T21( z )
1
d d[n]
x[n, h] e[n, h] e'[n, h]Re[n, h]
6.
Методы синтеза цифровых систем5
x
x1(t)
x(t,γ)
x2(t)
0
t1
t2
t3
...
x2[n] x[n, h] x1[n] n [0, N ]
0, if x2[n] x[n, h] x1[n];
n (h) x[n, h] x1[n], if x[n, h] x1[n];
x2[n] x[n, h], if x[n, h] x2 [n].
tN
t
(h)
N
(h)
n
n 0
(h) minp
h E
7.
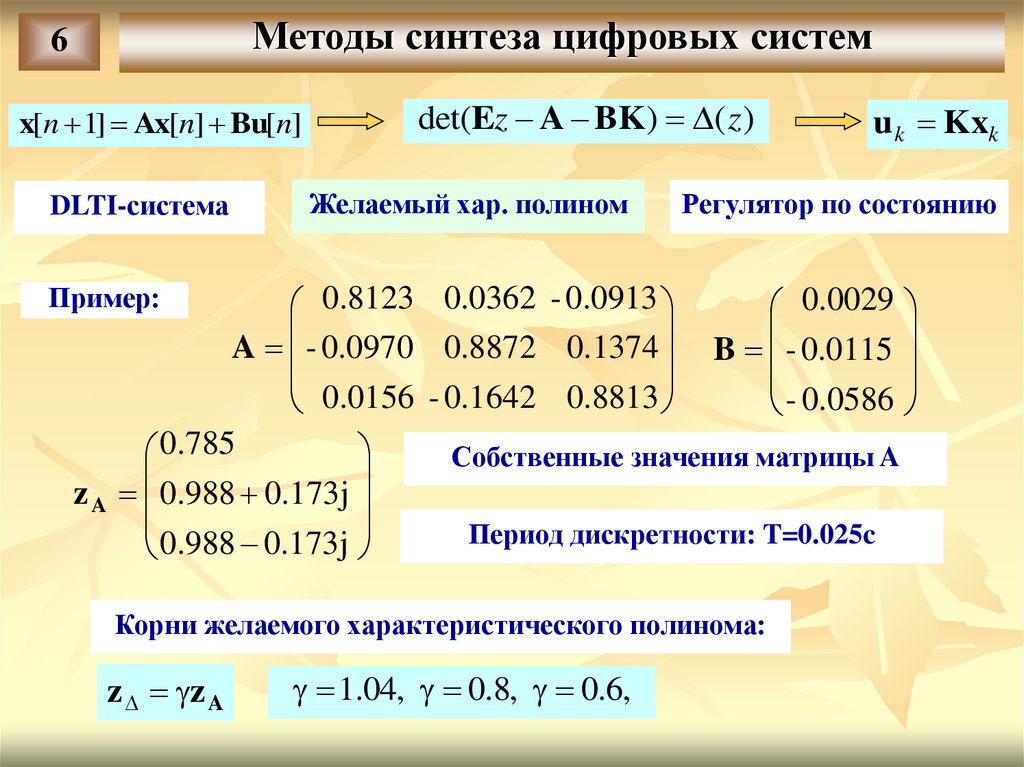
Методы синтеза цифровых систем6
x[n 1] Ax[n] Bu[n]
DLTI-система
det(Ez A BK) ( z )
Желаемый хар. полином
u k Kxk
Регулятор по состоянию
Пример:
0.8123 0.0362 - 0.0913
0.0029
A - 0.0970 0.8872 0.1374 B - 0.0115
0.0156
0.1642
0.8813
- 0.0586
0.785
Собственные значения матрицы A
z A 0.988 0.173j
Период дискретности: T=0.025c
0.988 0.173j
Корни желаемого характеристического полинома:
z z A
1.04, 0.8, 0.6,
8.
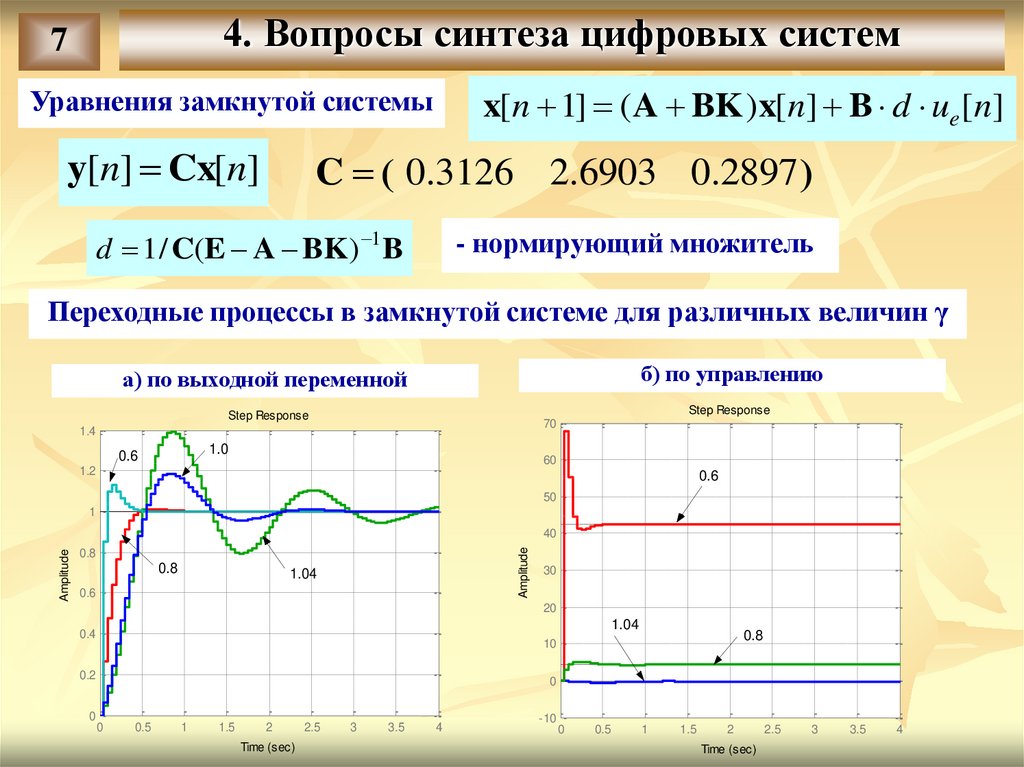
4. Вопросы синтеза цифровых систем7
x[n 1] ( A BK )x[n] B d ue [n]
Уравнения замкнутой системы
y[n] Cx[n]
C 0.3126 2.6903 0.2897
d 1 / C(E A BK ) 1 B
- нормирующий множитель
Переходные процессы в замкнутой системе для различных величин γ
б) по управлению
а) по выходной переменной
Step Response
Step Response
70
1.4
1.0
0.6
60
1.2
0.6
50
1
Amplitude
Amplitude
40
0.8
0.8
1.04
0.6
30
20
1.04
0.4
0.2
0
0.8
10
0
0
0.5
1
1.5
2
Time (sec)
2.5
3
3.5
4
-10
0
0.5
1
1.5
2
Time (sec)
2.5
3
3.5
4
9.
4. Вопросы синтеза цифровых систем8
DLTI-объект
u[n] Kx[n]
x[n 1] Ax[n] Bu[n]
x E ns , u E ms
Регулятор по состоянию дискретного объекта
Квадратичный функционал, заданный на движениях замкнутой системы:
J J (x, u)
2
x
'
[
n
]
Rx
[
n
]
u'[n]Qu[n]
n 1
J J (x, u) J (K ) min
K K
Задача LQR-оптимального синтеза
K – множество матриц размера ms ns с постоянными компонентами,
для которых собственные числа матрицы A-BK расположены
в открытом единичном круге на комплексной плоскости
10.
94. Вопросы синтеза цифровых систем
Ограничения:
1. Пара (A,B) стабилизируемая
2. R 0, Q>0
3. Пара (R, A-BQ-1BT) не должна иметь неуправляемой части
с полюсами на единичной окружности
Решение задачи LQR-оптимального синтеза:
K opt (B T SB Q) 1 B T SB
Здесь матрица S – решение матричного
алгебраического уравнения Риккати:
A TSA S A TSBBTSB(B TSB Q) 1 B TSB R 0
11.
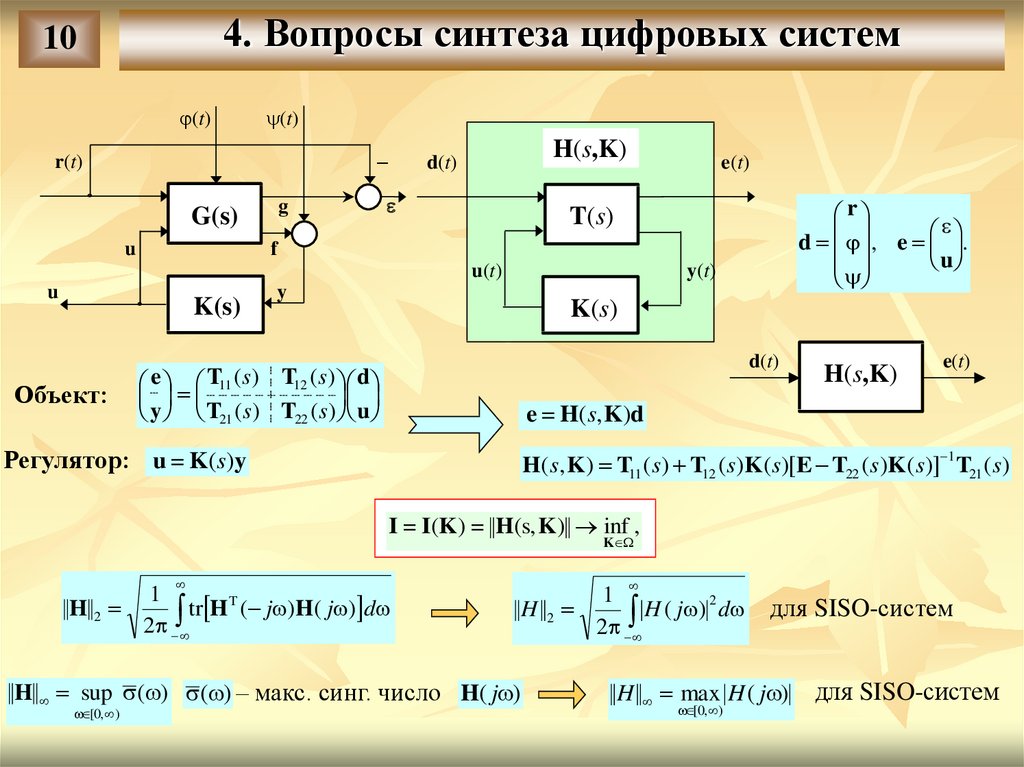
4. Вопросы синтеза цифровых систем10
(t)
(t)
–
r(t)
g
G(s)
u
H(s,K)
d(t)
e(t)
f
u(t)
u
K(s)
Объект:
r
d , e .
u
T(s)
y(t)
y
K(s)
d(t)
e T11 ( s ) T12 ( s ) d
y T21 ( s ) T22 ( s ) u
H(s,K)
e(t)
e = H(s, K)d
Регулятор: u = K(s)y
1
H( s, K ) T11 ( s) T12 ( s)K ( s) E T22 ( s)K ( s) T21 ( s)
I = I(K ) = H(s, K ) inf ,
K
1
H2
tr H T ( j )H( j ) d
2
H sup ( ) ( ) – макс. синг. число H( j )
[0, )
H
2
1
2
H ( j ) d
2
H
для SISO-систем
max H ( j )
[0, )
для SISO-систем
12.
4. Вопросы синтеза цифровых систем11
Optim
Конечномерная
оптимизация
NCD
Оптимизация
по нормам H2 и H∞
Control
Модальное
управление
μ-Tools
Робастное
управление
Robust
LMI