



























































")





























")


")






")












")












 задачи.")



















")

")
")
")


























 Программное обеспечение
Программное обеспечениеПохожие презентации:










Программное обеспечение робототехнических систем 2025
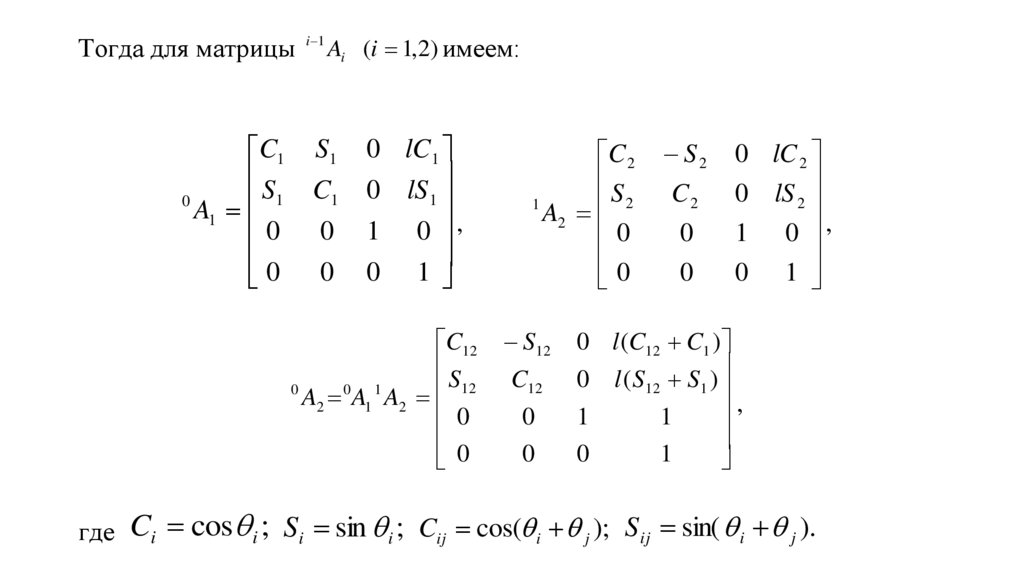
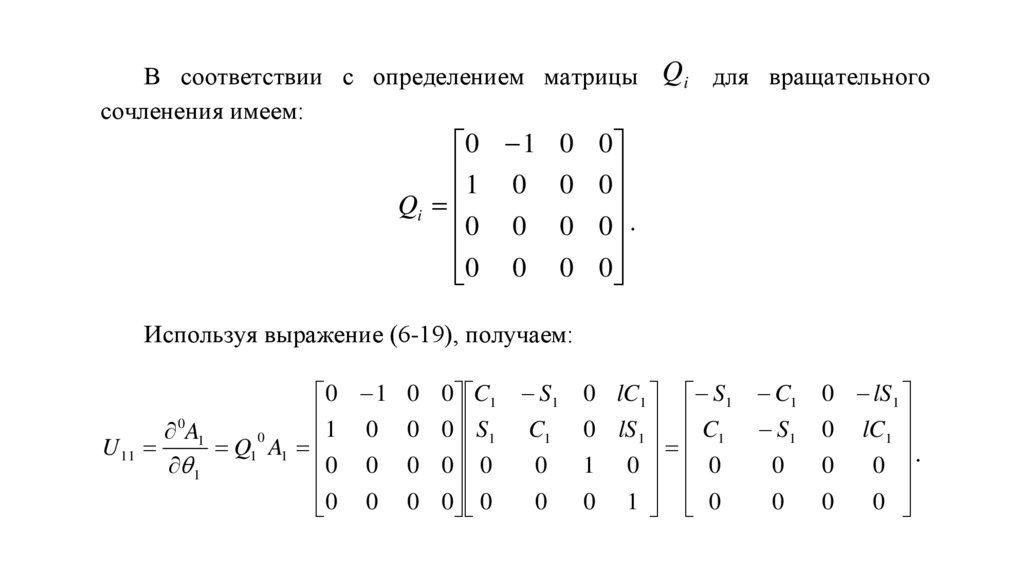
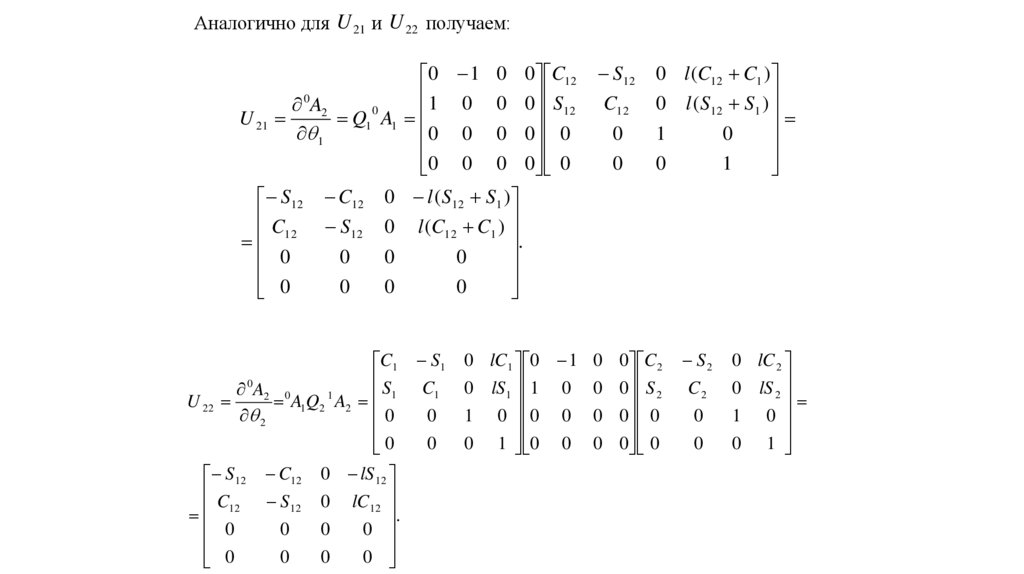
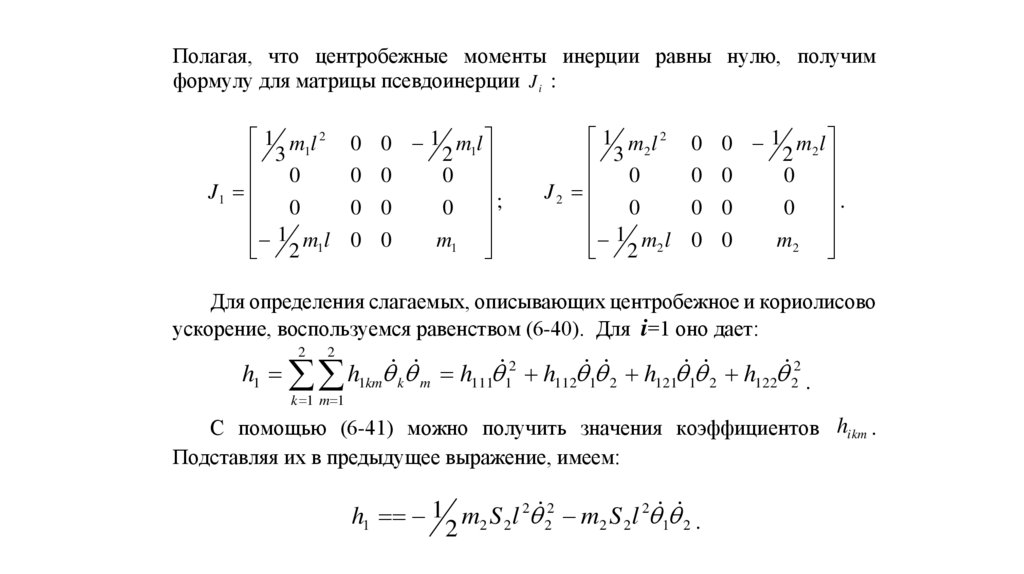
1. Программное обеспечение робототехнических систем
2. Содержание курса
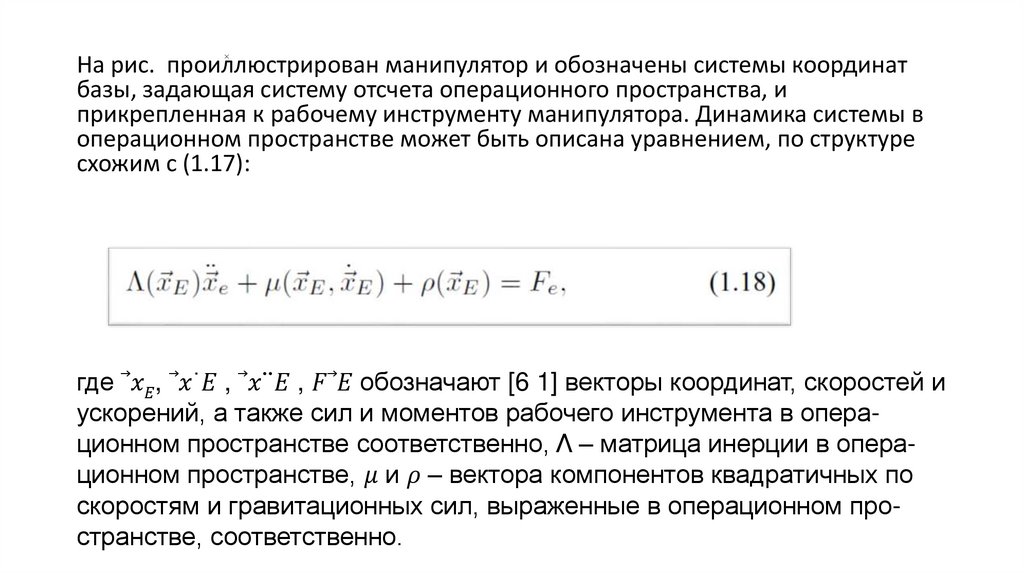
Базовые понятия, определения и принцип, используемых при описаниии анализе динамики робототехнических систем.
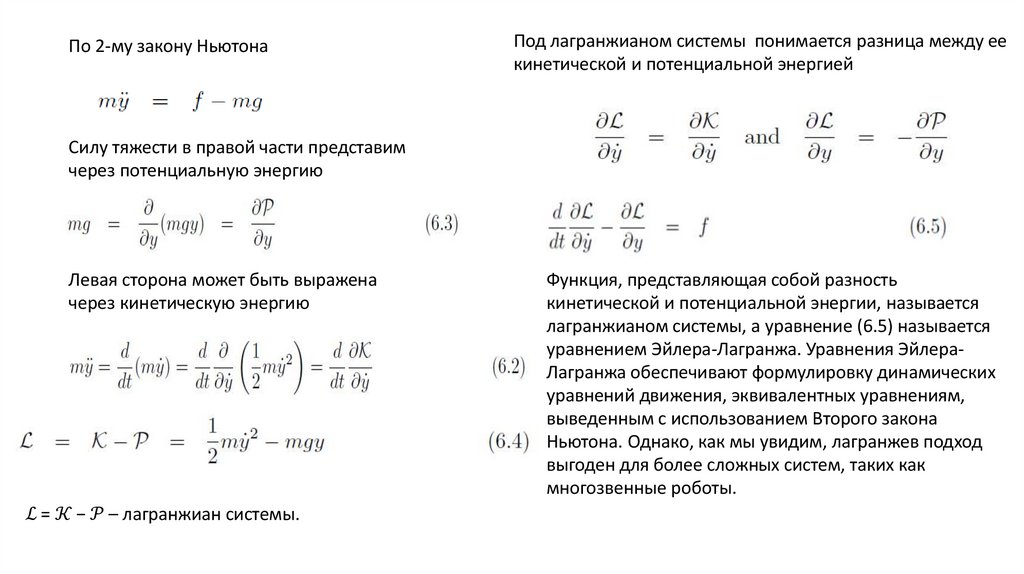
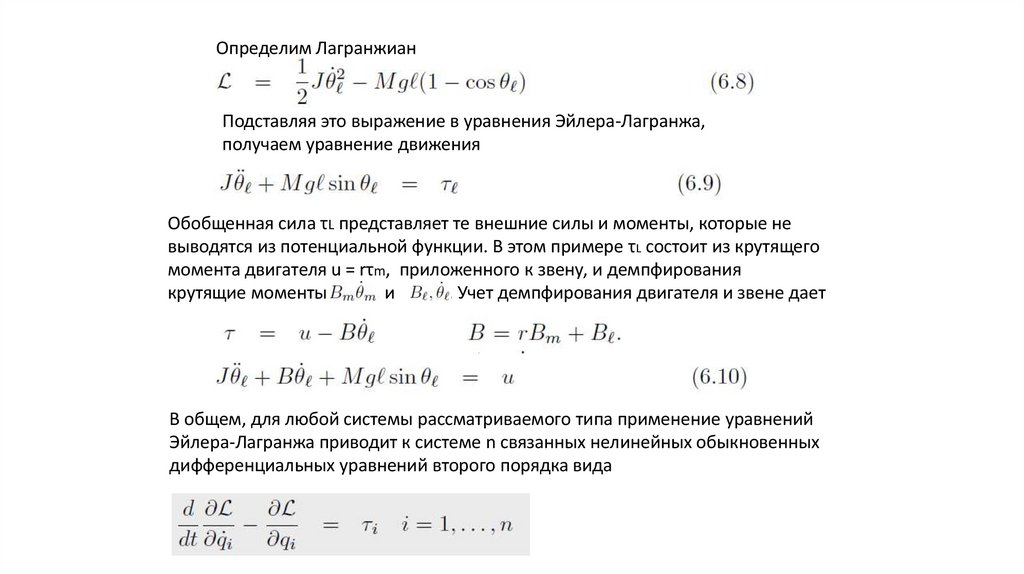
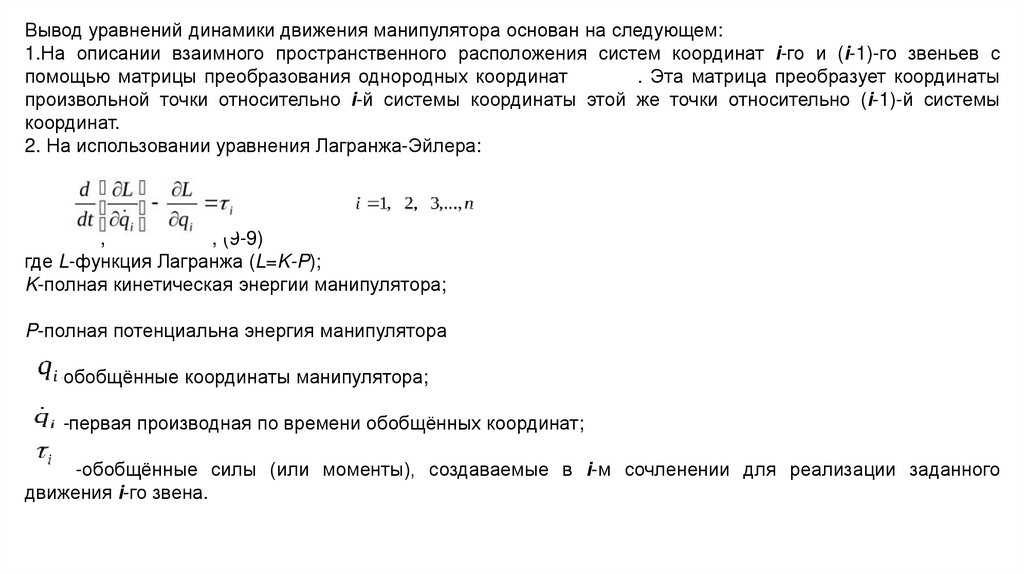
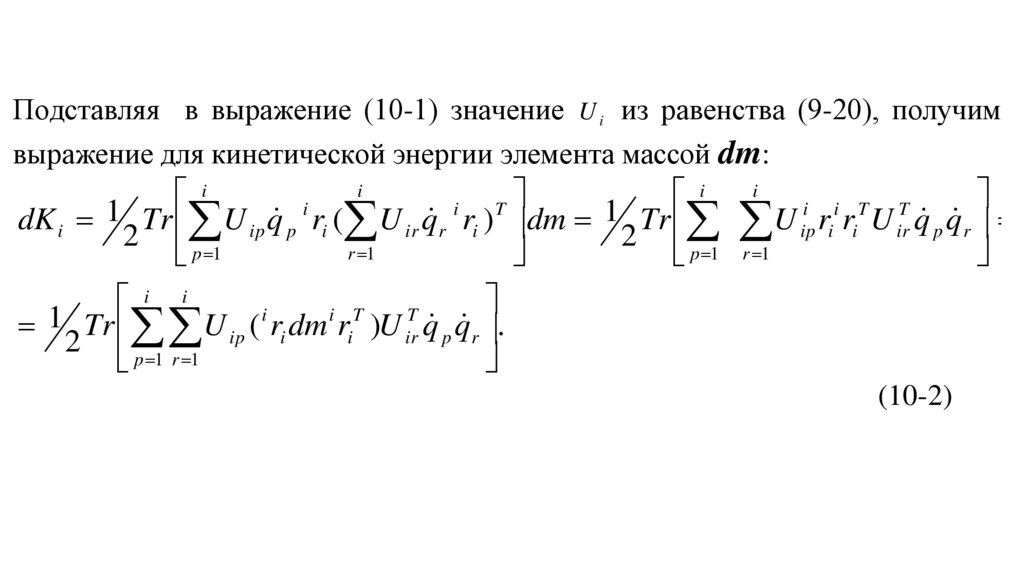
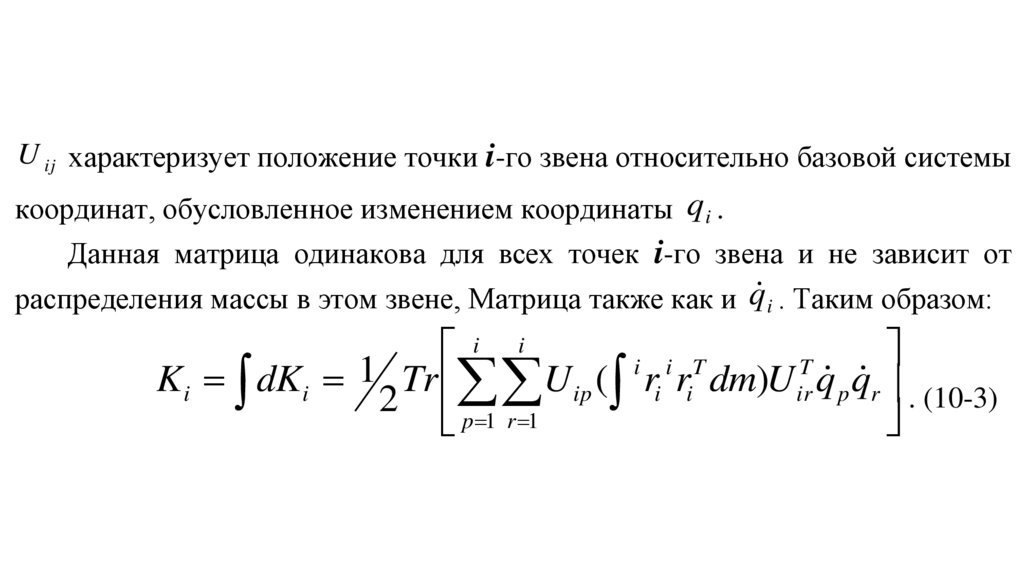
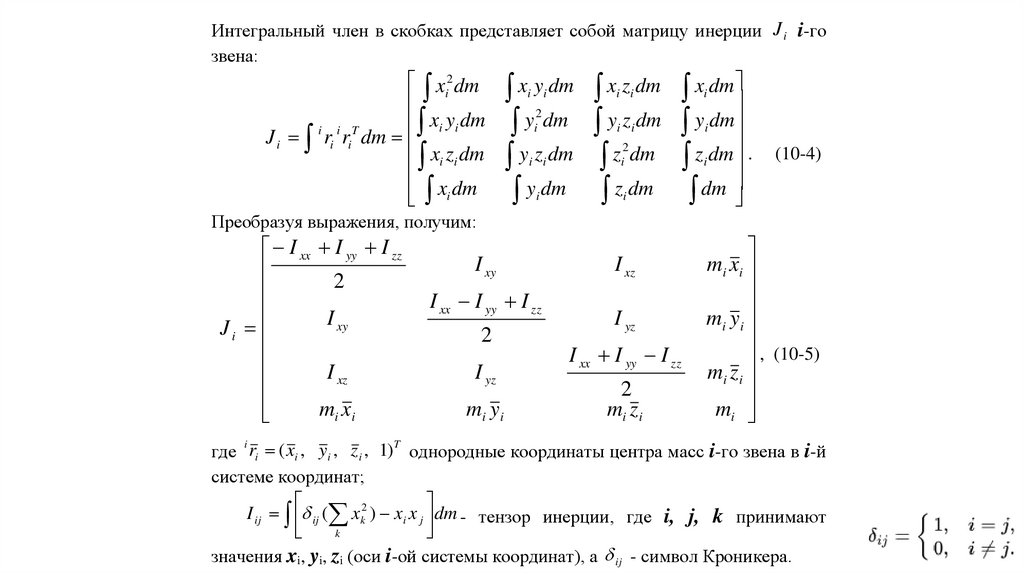
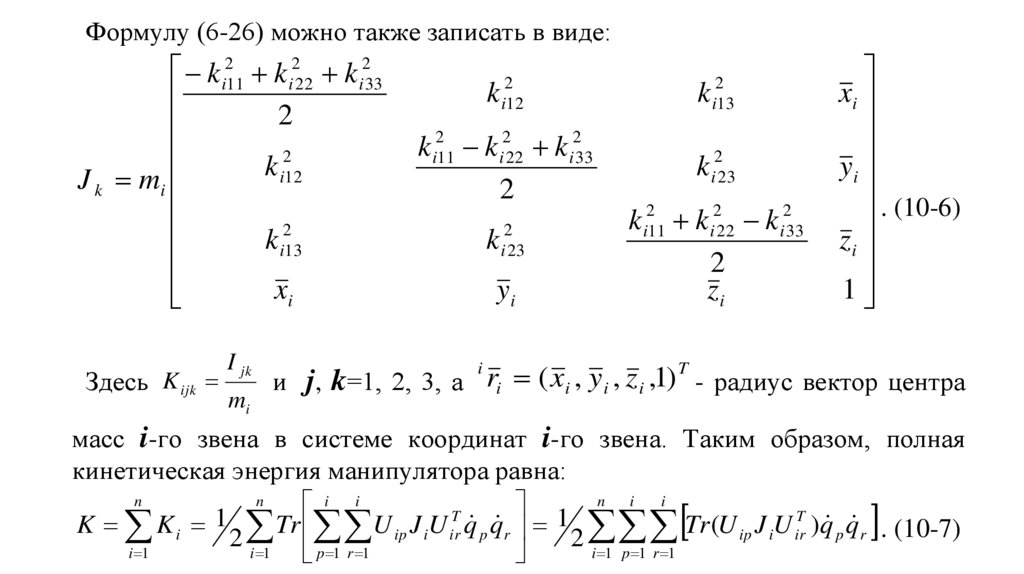
Вывод уравнений движения на основе метода Эйлера-Лагранжа,
оперирующего вычислениями кинетической и потенциальной энергии
многозвенных систем
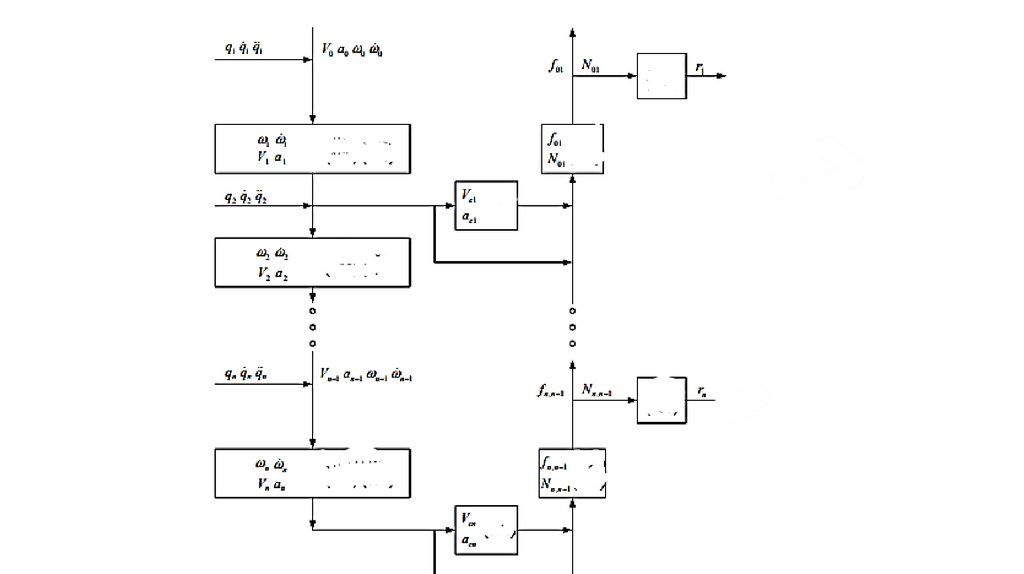
Метод Ньютона-Эйлера, для которого отправной точкой является баланс
сил в системе. Изложение строится от применения второго закона
Ньютона в общем виде для линейного и вращательного движения
Свойства уравнений движения робототехнических систем, которые
могут быть использованы при анализе их динамики, планировании
траекторий и синтезе алгоритмов управления
3. Специализированные программные средства, среды разработки и компьютерного моделирования, прикладные пакеты, библиотеки
• Прикладной программный пакет Corke Robotics Toolbox для среды Matlab [1].• Прикладной пакет для символьного моделирования роботов Open Symoro
[2].
• Прикладной программный пакет ARTE для моделирования про-мышленных
роботов в среде Matlab [3].
• Прикладной программный пакет Drake для моделирования и пла¬нирования
движений роботов [4].
• С++ робототехнические библиотеки с открытым кодом OROCOS [5].
• C++ библиотека Dynamechs для моделирования динамики слож-ных систем
твердых тел [6].
• Среда имитационного моделирования робототехнических систем V-REP [7].
• Среда компьютерного моделирования робототехнических систем Gazebo [8].
4. Базовые понятия и принципы Роботы как механические системы
• Робототехническая система (робот) – это совокупностьмеханизмов и устройств (электронных, электрических,
оптических, пневматических, гидравлических и т.п.),
формирующих единую систему, в том числе имеющую
распределенную сетевую структуру и выполняющую рабочие
операции, связанные со сложными пространственными
перемещениями, способную к целесообразному поведению в
условиях изменяющейся внешней обстановки без
непосредственного участия человека за счет автоматизации
процессов получения, преобразования, передачи и
использования энергии, информации и материалов.
5.
С точки зрения механики, современный робот представляет собойуправляемую систему достаточно сложной кинематической
конструкции из множества звеньев, сопряженных посредством
линейно или/и вращательно подвижных сочленений и
взаимодействующих между собой и с окружающими объектами,
приводимую в движением посредством различных типов
актюаторов и перемещающиеся по произвольным траекториям
под действием внешних, консервативных и диссипативных сил,
включая инерционные, кориолисовы и центробежные,
гравитационные силы, силы трения, упругой и неупругой
деформаций, аэродинамического и гидродинамического
сопротивления среды и т.д.
6. Кинематические пары и цепи
Звенья, образующие попарные соединения и допускающиеотносительные перемещения, называют кинематическими парами.
На относительное движение звеньев в кинематической паре
накладывается от 1 до