


Похожие презентации:










Презентация по калибровке датчиков ЧАППИ-4
1.
Калибровка датчиков обнаружения препятствий ивизуального позиционирования
● Подготовка рабочего места: установка оборудования и программного
обеспечения на ПК для калибровки
● Калибровка датчиков визуального позиционирования и проверка
результатов
Внимание! ПО для калибровки создано для прошивки ЧАППИ.
Использование данного ПО с другими версиями может
некорректно откалибровать датчики или привести к полной
неисправности датчиков визуального позиционирования!
2.
Передние датчики (Front)Нижние датчики (Bottom)
3.
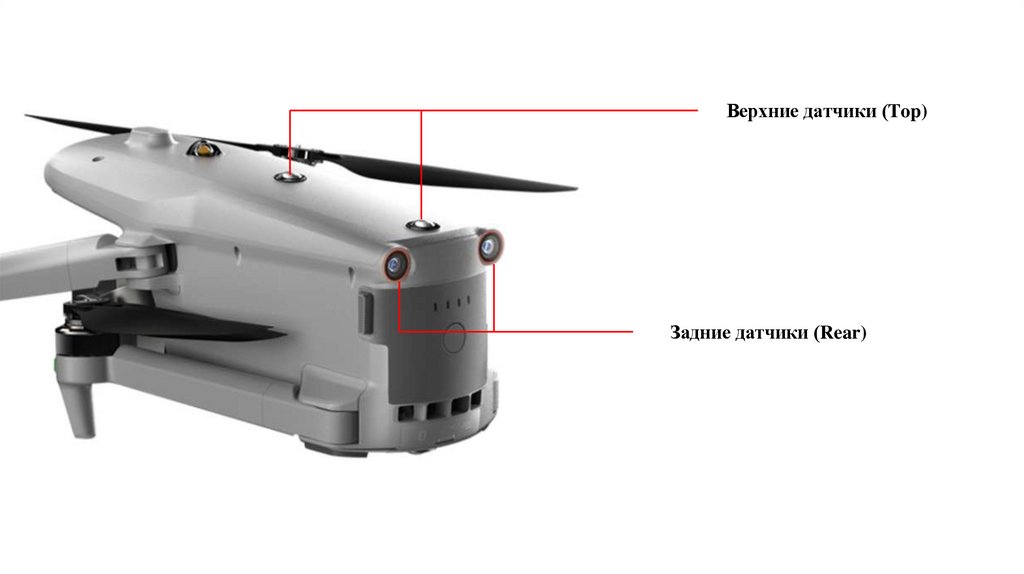
Верхние датчики (Top)Задние датчики (Rear)
4.
I. Общий порядок калибровкиПодготовка
рабочего места
Установка ПО для
калибровки
Калибровка
передних (Front)
датчиков
Проверка
результата
Калибровка
задних (Rear)
датчиков
Проверка
результата
Калибровка
нижних (Bottom)
датчиков
Проверка
результата
Калибровка
верхних (Top)
датчиков
Проверка
результата
5.
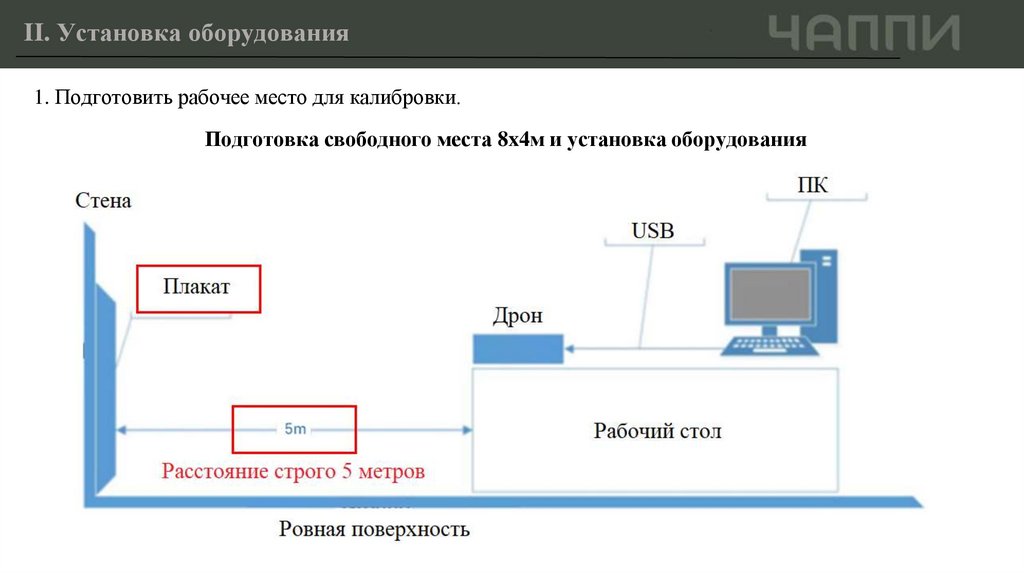
II. Установка оборудования1. Подготовить рабочее место для калибровки.
Подготовка свободного места 8x4м и установка оборудования
Visual
Calibration board
0.3 to 1 meter
6.
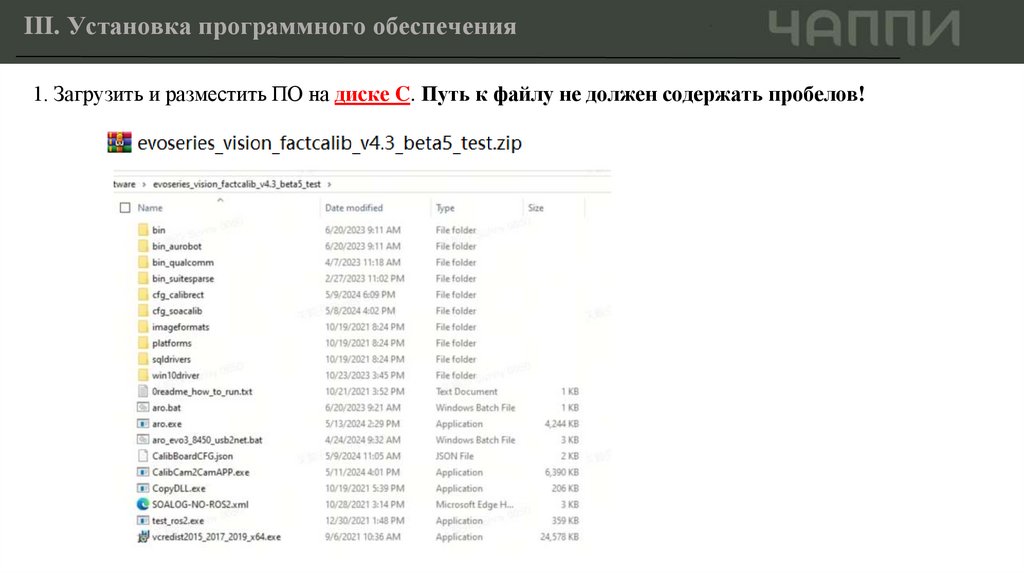
III. Установка программного обеспечения1. Загрузить и разместить ПО на диске C. Путь к файлу не должен содержать пробелов!
7.
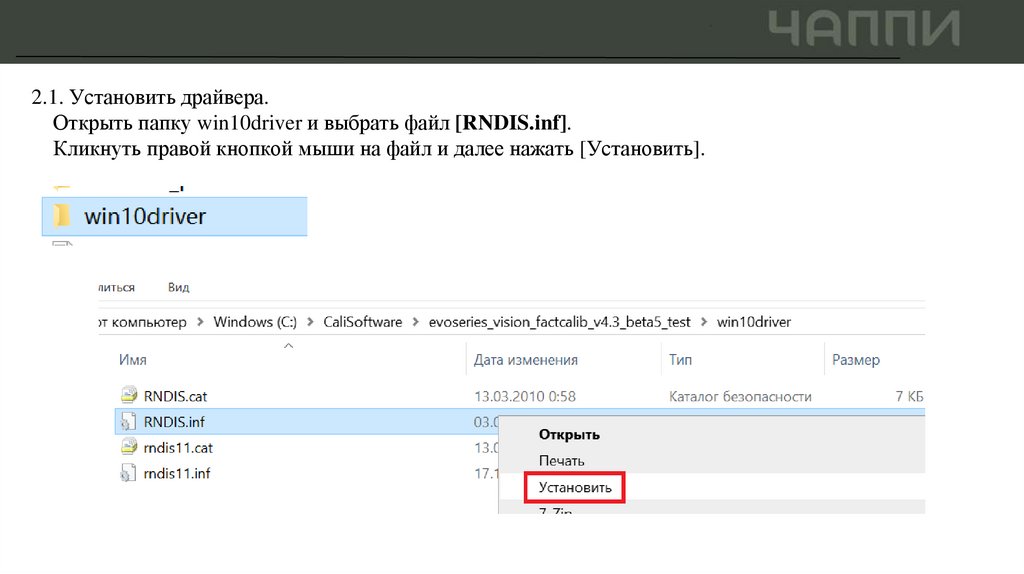
2.1. Установить драйвера.Открыть папку win10driver и выбрать файл [RNDIS.inf].
Кликнуть правой кнопкой мыши на файл и далее нажать [Установить].
8.
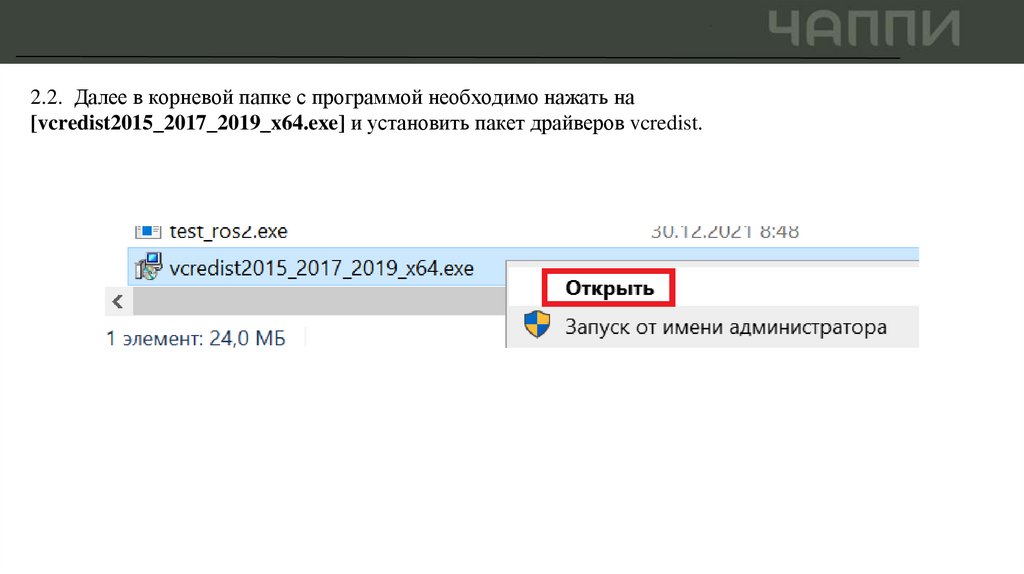
2.2. Далее в корневой папке с программой необходимо нажать на[vcredist2015_2017_2019_x64.exe] и установить пакет драйверов vcredist.
9.
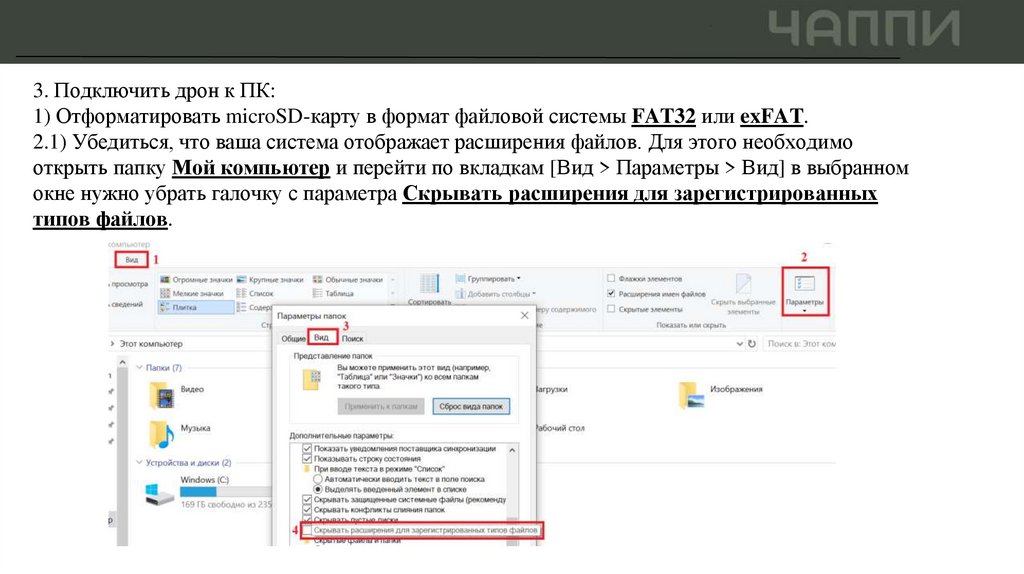
3. Подключить дрон к ПК:1) Отформатировать microSD-карту в формат файловой системы FAT32 или exFAT.
2.1) Убедиться, что ваша система отображает расширения файлов. Для этого необходимо
открыть папку Мой компьютер и перейти по вкладкам [Вид > Параметры > Вид] в выбранном
окне нужно убрать галочку с параметра Скрывать расширения для зарегистрированных
типов файлов.
10.
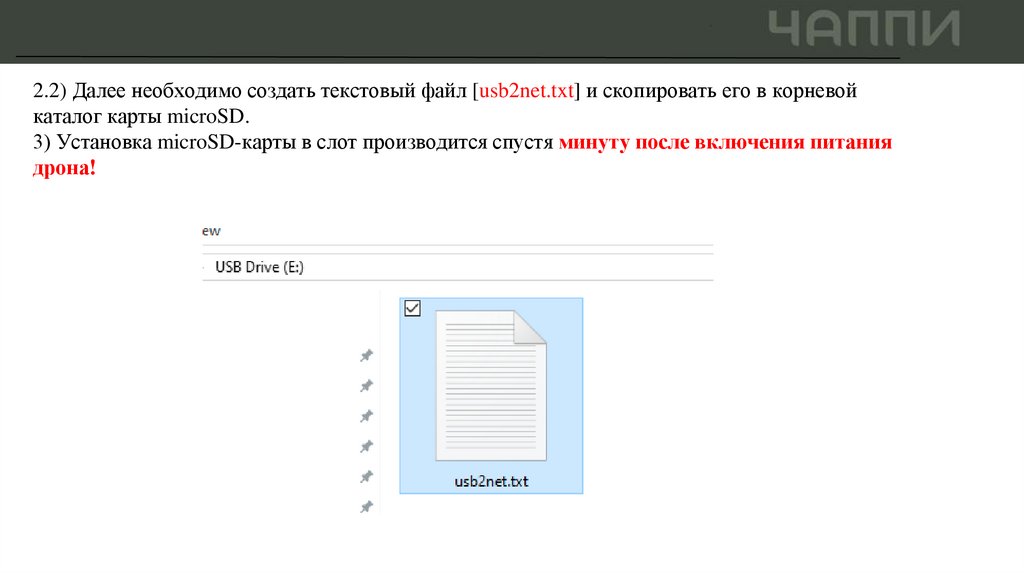
2.2) Далее необходимо создать текстовый файл [usb2net.txt] и скопировать его в корневойкаталог карты microSD.
3) Установка microSD-карты в слот производится спустя минуту после включения питания
дрона!
11.
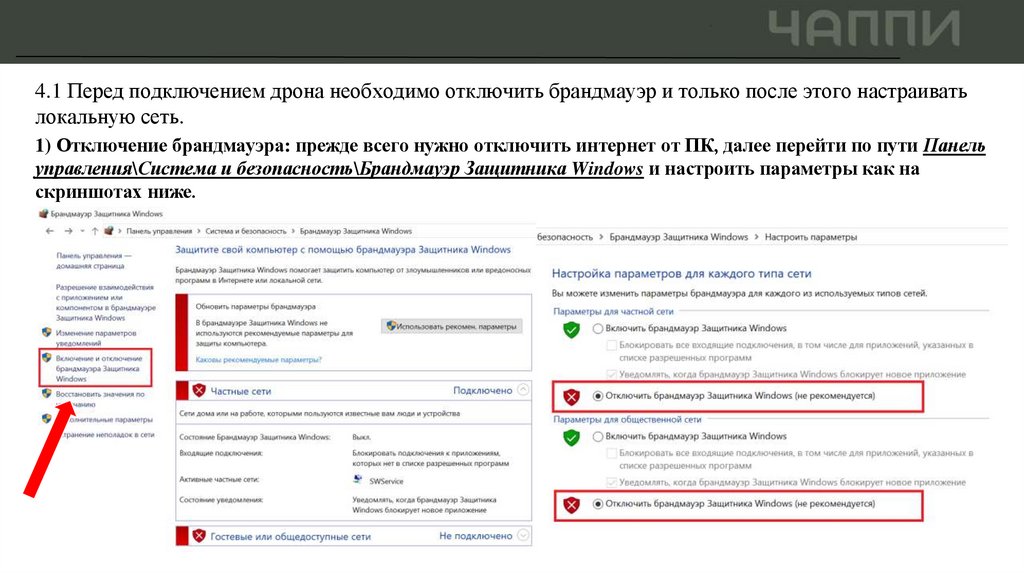
4.1 Перед подключением дрона необходимо отключить брандмауэр и только после этого настраиватьлокальную сеть.
1) Отключение брандмауэра: прежде всего нужно отключить интернет от ПК, далее перейти по пути Панель
управления\Система и безопасность\Брандмауэр Защитника Windows и настроить параметры как на
скриншотах ниже.
12.
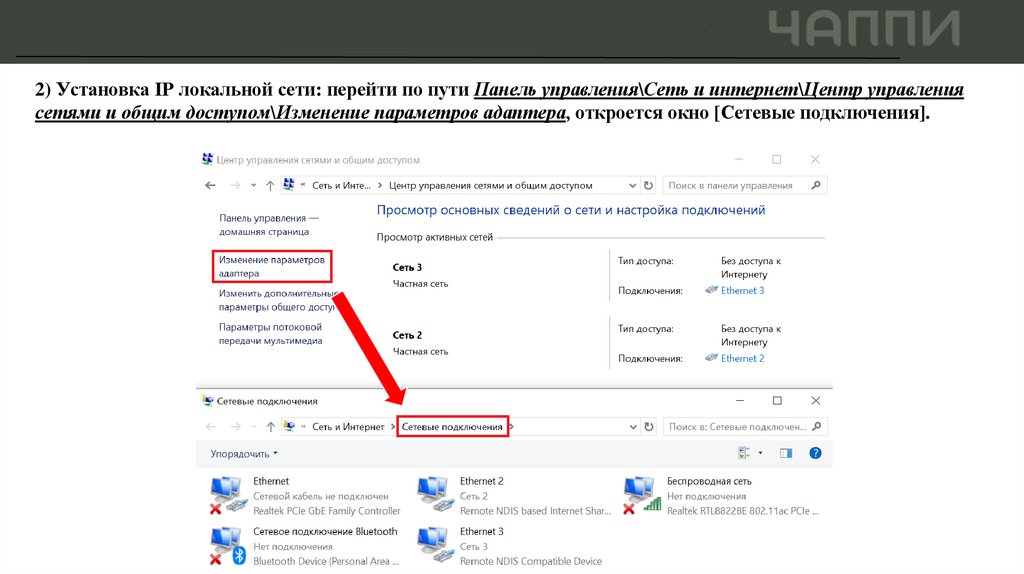
2) Установка IP локальной сети: перейти по пути Панель управления\Сеть и интернет\Центр управлениясетями и общим доступом\Изменение параметров адаптера, откроется окно [Сетевые подключения].
13.
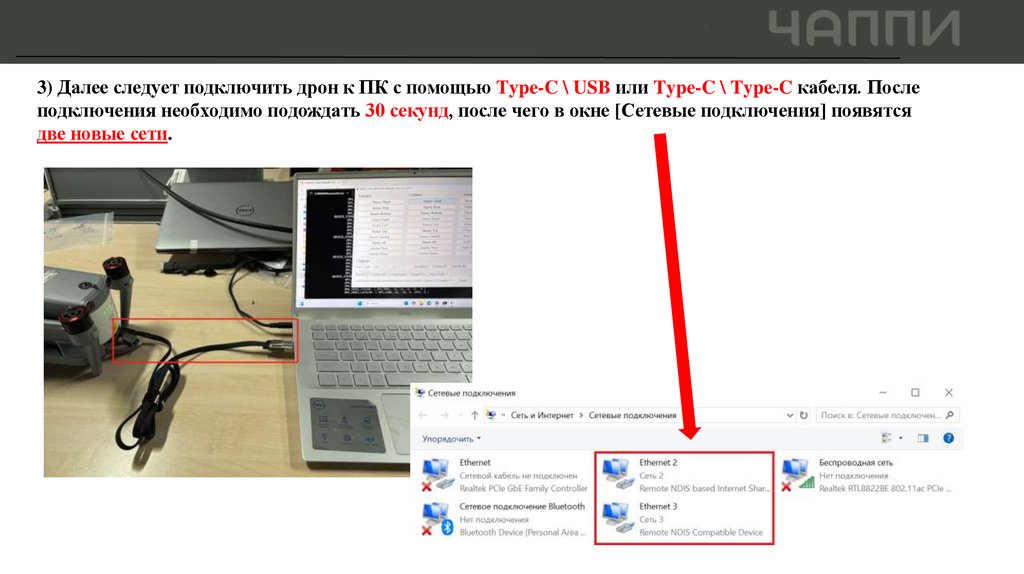
3) Далее следует подключить дрон к ПК с помощью Type-C \ USB или Type-C \ Type-C кабеля. Послеподключения необходимо подождать 30 секунд, после чего в окне [Сетевые подключения] появятся
две новые сети.
14.
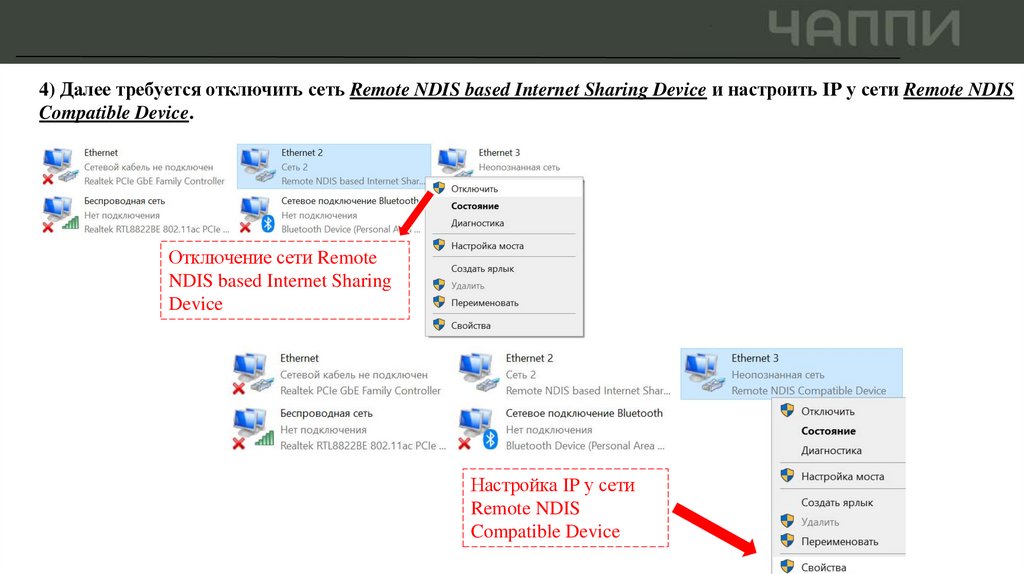
4) Далее требуется отключить сеть Remote NDIS based Internet Sharing Device и настроить IP у сети Remote NDISCompatible Device.
Отключение сети Remote
NDIS based Internet Sharing
Device
Настройка IP у сети
Remote NDIS
Compatible Device
15.
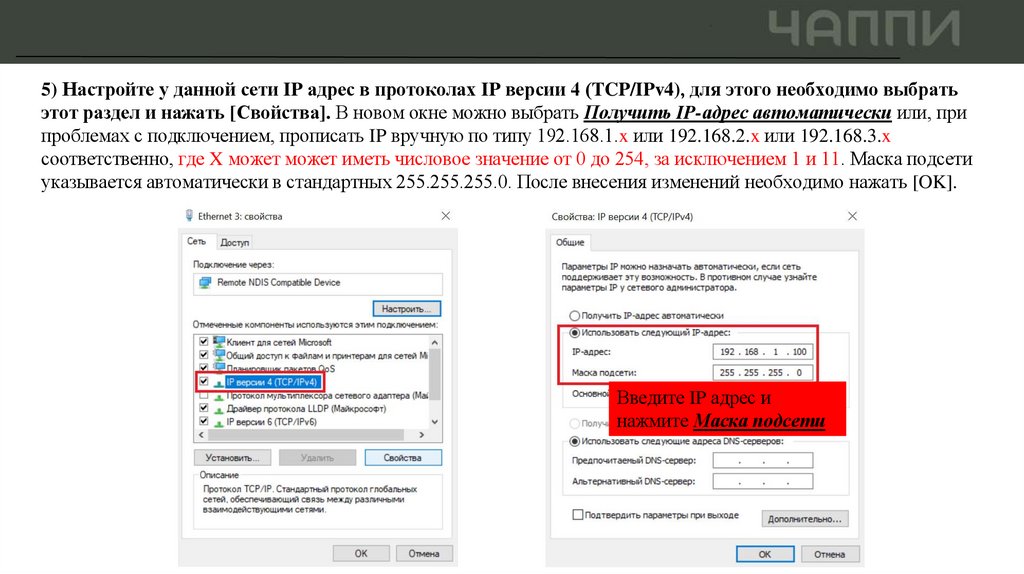
5) Настройте у данной сети IP адрес в протоколах IP версии 4 (TCP/IPv4), для этого необходимо выбратьэтот раздел и нажать [Свойства]. В новом окне можно выбрать Получить IP-адрес автоматически или, при
проблемах с подключением, прописать IP вручную по типу 192.168.1.x или 192.168.2.x или 192.168.3.x
соответственно, где X может может иметь числовое значение от 0 до 254, за исключением 1 и 11. Маска подсети
указывается автоматически в стандартных 255.255.255.0. После внесения изменений необходимо нажать [OK].
Введите IP адрес и
нажмите Маска подсети
16.
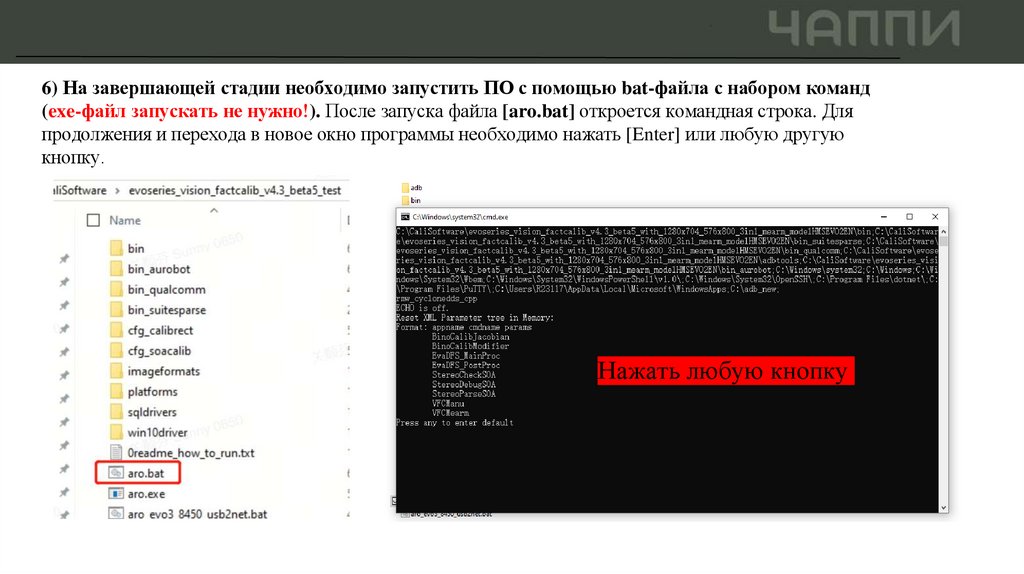
6) На завершающей стадии необходимо запустить ПО с помощью bat-файла с набором команд(exe-файл запускать не нужно!). После запуска файла [aro.bat] откроется командная строка. Для
продолжения и перехода в новое окно программы необходимо нажать [Enter] или любую другую
кнопку.
Нажать любую кнопку
17.
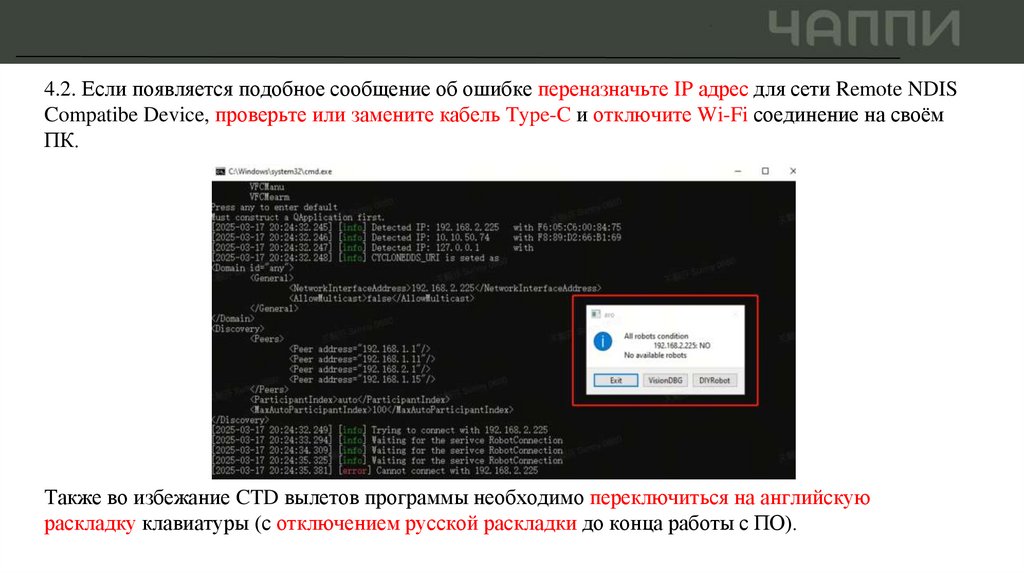
4.2. Если появляется подобное сообщение об ошибке переназначьте IP адрес для сети Remote NDISCompatibe Device, проверьте или замените кабель Type-C и отключите Wi-Fi соединение на своём
ПК.
Также во избежание CTD вылетов программы необходимо переключиться на английскую
раскладку клавиатуры (с отключением русской раскладки до конца работы с ПО).
18.
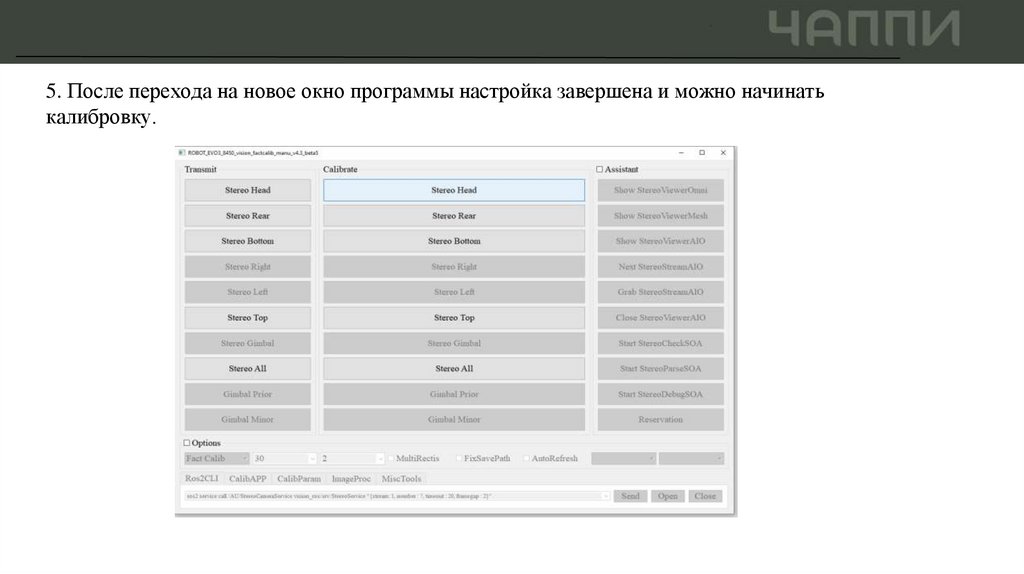
5. После перехода на новое окно программы настройка завершена и можно начинатькалибровку.
19.
IV. Общий процесс калибровкиВыберете
нужный датчик
в программе для
калибровки
Калибровочная доска
должна быть строго в
указанном по мануалу
положении перед
камерой датчика
После установки
правильного положения
доски нажмите [Space]
для фотофиксации и
продолжения
Весь этап
калибровки
состоит из 35
фотографий
● Примечания: Во время съемки серии из 35 калибровочных фотографий дрон нельзя отключать или перемещать.
Для фотофиксации и
продолжения
необходимо нажать
[Space]
Доска удерживается в
указанном по мануалу
положении с соответствующим
порядковым номером.
Каждое положение доски имеет
порядковый номер, поэтому положения
необходимо устанавливать в строгой
последовательности!
20.
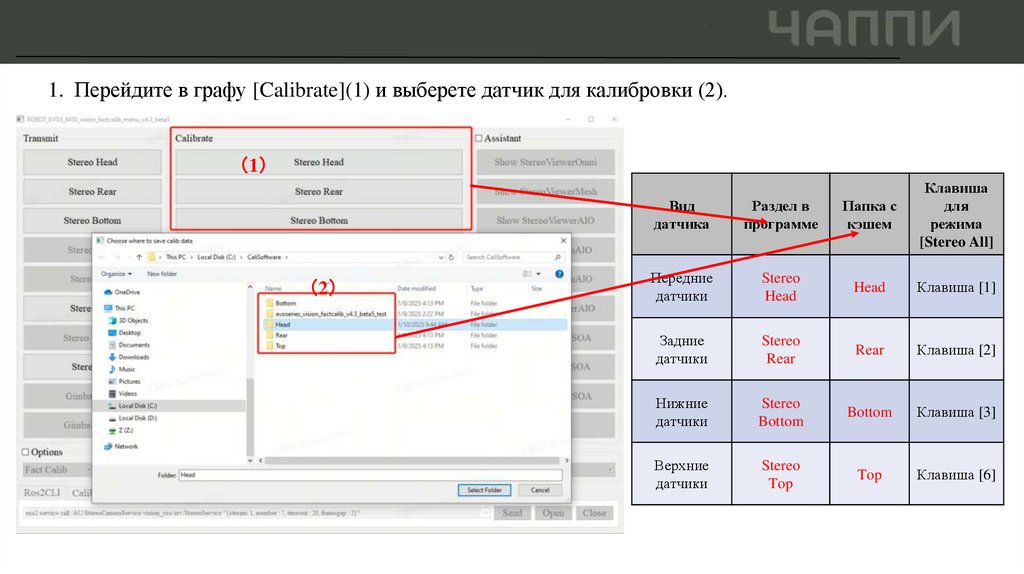
1. Перейдите в графу [Calibrate](1) и выберете датчик для калибровки (2).1
2
Вид
датчика
Раздел в
программе
Папка с
кэшем
Клавиша
для
режима
[Stereo All]
Передние
датчики
Stereo
Head
Head
Клавиша [1]
Задние
датчики
Stereo
Rear
Rear
Клавиша [2]
Нижние
датчики
Stereo
Bottom
Bottom
Клавиша [3]
Верхние
датчики
Stereo
Top
Top
Клавиша [6]
21.
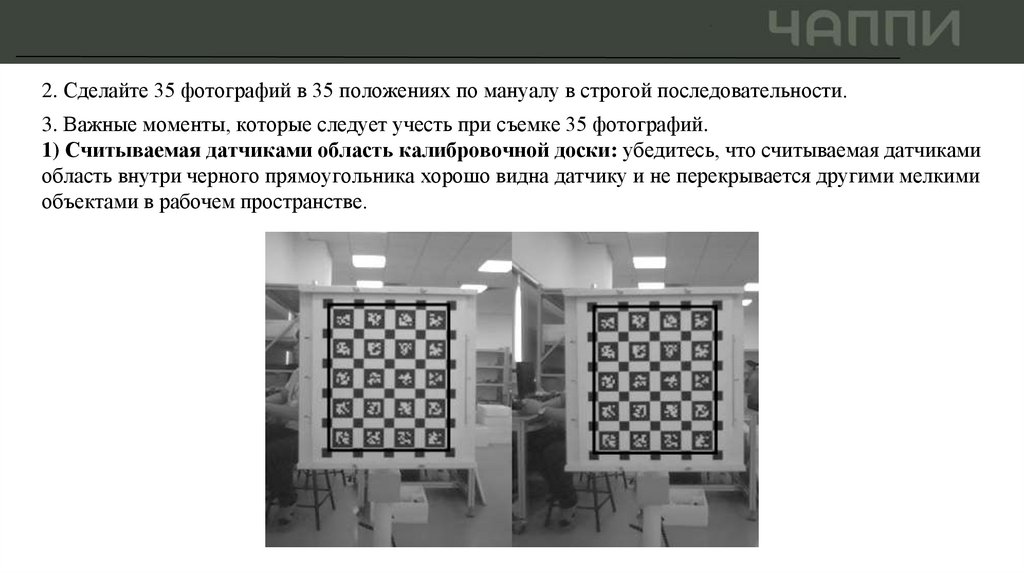
2. Сделайте 35 фотографий в 35 положениях по мануалу в строгой последовательности.3. Важные моменты, которые следует учесть при съемке 35 фотографий.
1) Считываемая датчиками область калибровочной доски: убедитесь, что считываемая датчиками
область внутри черного прямоугольника хорошо видна датчику и не перекрывается другими мелкими
объектами в рабочем пространстве.
22.
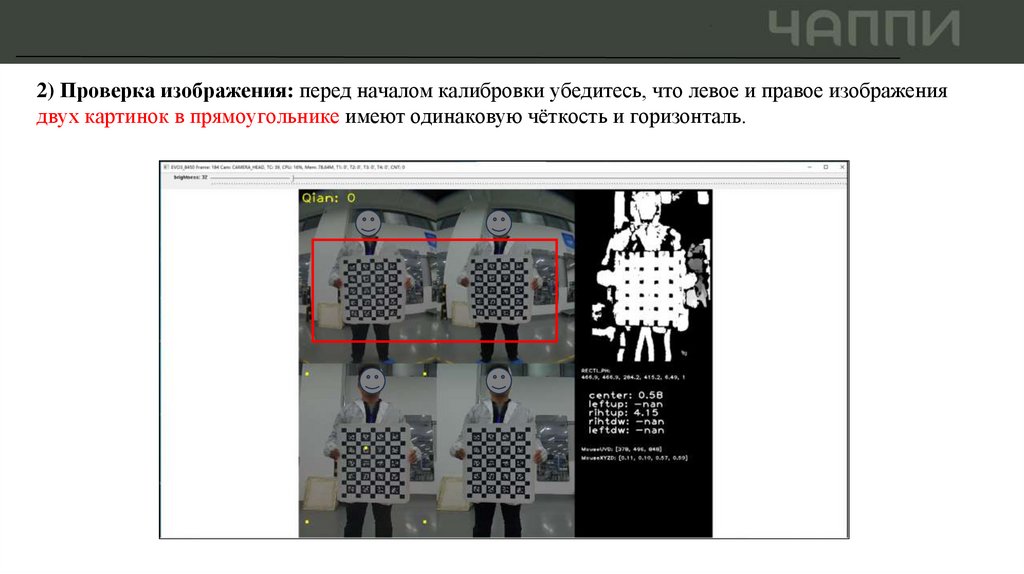
2) Проверка изображения: перед началом калибровки убедитесь, что левое и правое изображениядвух картинок в прямоугольнике имеют одинаковую чёткость и горизонталь.
23.
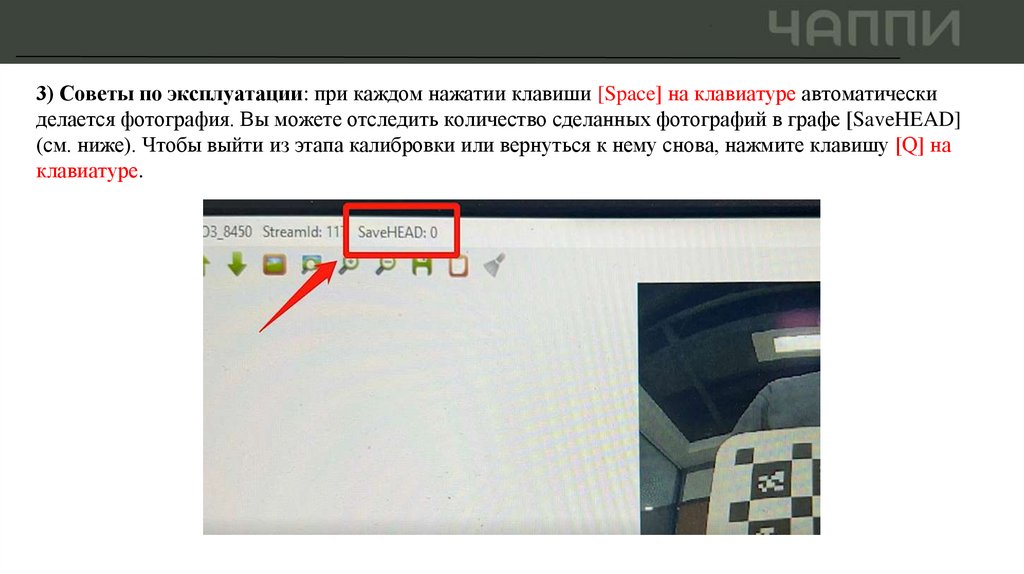
3) Советы по эксплуатации: при каждом нажатии клавиши [Space] на клавиатуре автоматическиделается фотография. Вы можете отследить количество сделанных фотографий в графе [SaveHEAD]
(см. ниже). Чтобы выйти из этапа калибровки или вернуться к нему снова, нажмите клавишу [Q] на
клавиатуре.
24.
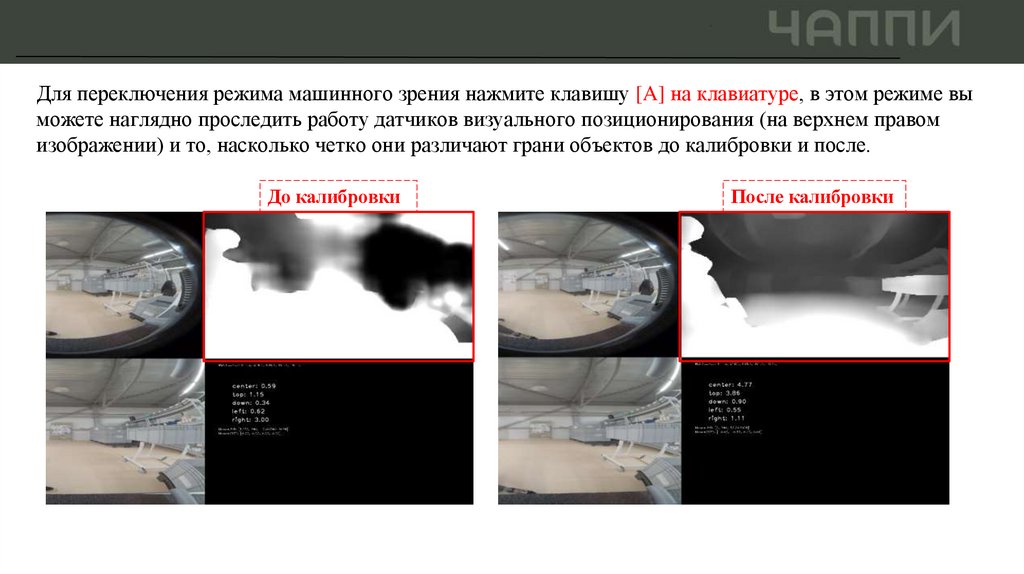
Для переключения режима машинного зрения нажмите клавишу [A] на клавиатуре, в этом режиме выможете наглядно проследить работу датчиков визуального позиционирования (на верхнем правом
изображении) и то, насколько четко они различают грани объектов до калибровки и после.
До калибровки
После калибровки
25.
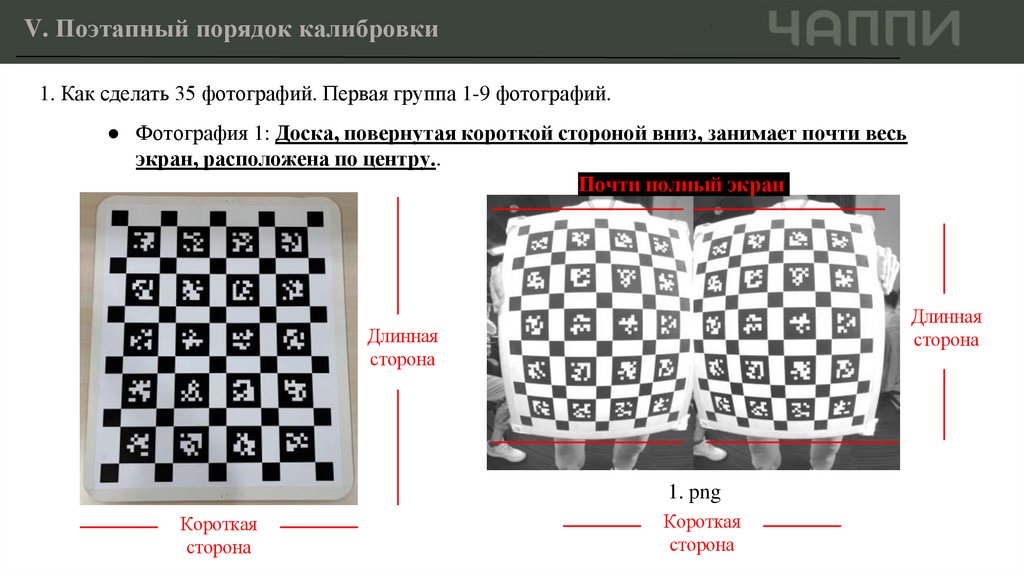
V. Поэтапный порядок калибровки1. Как сделать 35 фотографий. Первая группа 1-9 фотографий.
● Фотография 1: Доска, повернутая короткой стороной вниз, занимает почти весь
экран, расположена по центру..
Почти полный экран
Длинная
сторона
Длинная
сторона
1. png
Короткая
сторона
Короткая
сторона
26.
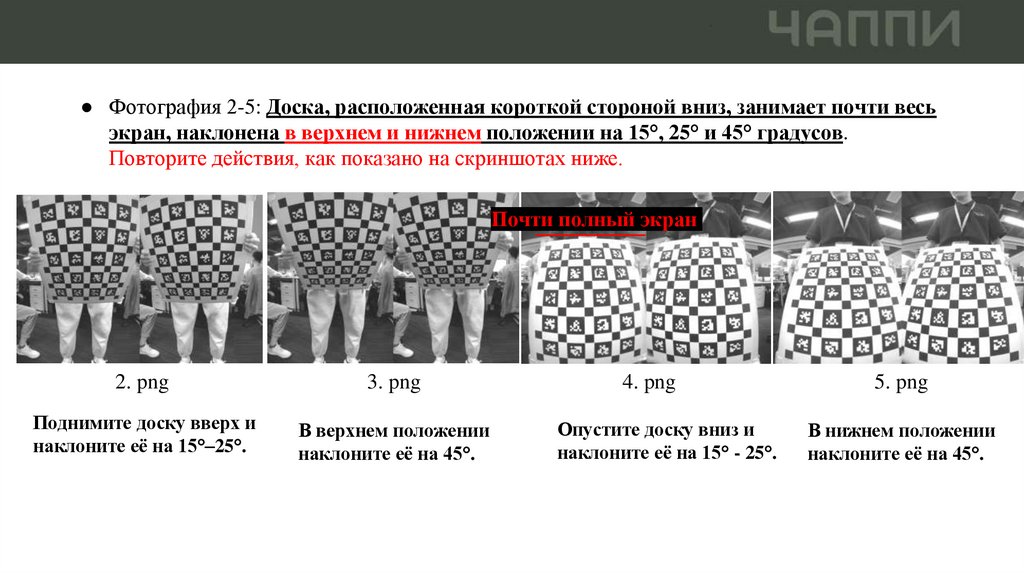
● Фотография 2-5: Доска, расположенная короткой стороной вниз, занимает почти весьэкран, наклонена в верхнем и нижнем положении на 15°, 25° и 45° градусов.
Повторите действия, как показано на скриншотах ниже.
Почти полный экран
2. png
3. png
Поднимите доску вверх и
наклоните её на 15°–25°.
В верхнем положении
наклоните её на 45°.
4. png
Опустите доску вниз и
наклоните её на 15° - 25°.
5. png
В нижнем положении
наклоните её на 45°.
27.
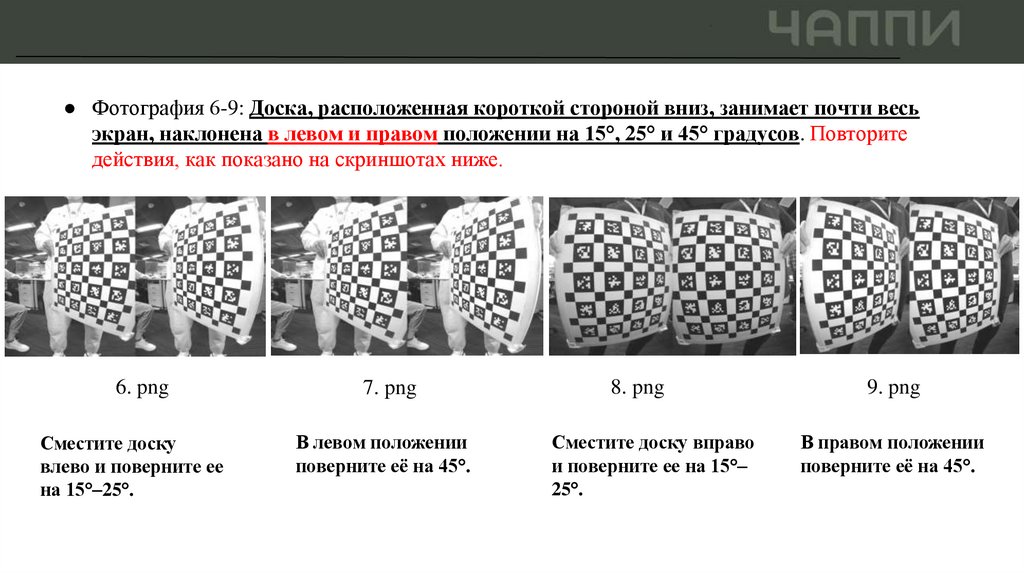
● Фотография 6-9: Доска, расположенная короткой стороной вниз, занимает почти весьэкран, наклонена в левом и правом положении на 15°, 25° и 45° градусов. Повторите
действия, как показано на скриншотах ниже.
6. png
7. png
Сместите доску
влево и поверните ее
на 15°–25°.
В левом положении
поверните её на 45°.
8. png
Сместите доску вправо
и поверните ее на 15°–
25°.
9. png
В правом положении
поверните её на 45°.
28.
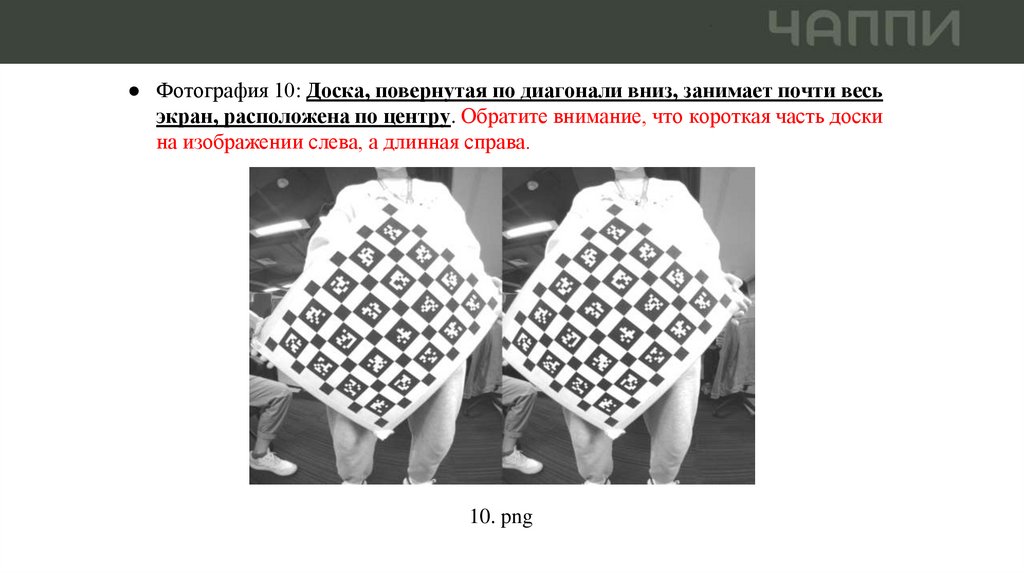
● Фотография 10: Доска, повернутая по диагонали вниз, занимает почти весьэкран, расположена по центру. Обратите внимание, что короткая часть доски
на изображении слева, а длинная справа.
10. png
29.
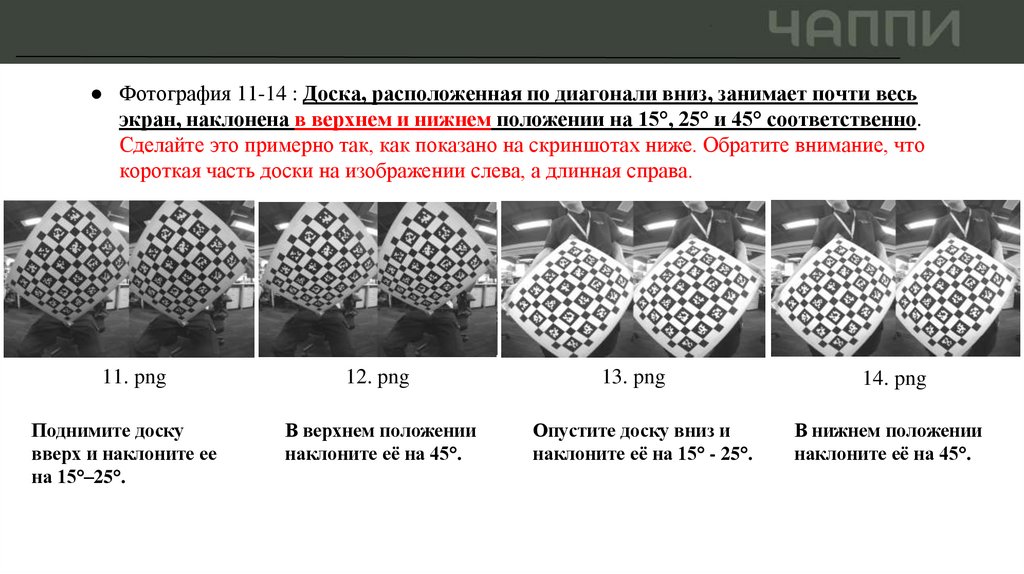
● Фотография 11-14 : Доска, расположенная по диагонали вниз, занимает почти весьэкран, наклонена в верхнем и нижнем положении на 15°, 25° и 45° соответственно.
Сделайте это примерно так, как показано на скриншотах ниже. Обратите внимание, что
короткая часть доски на изображении слева, а длинная справа.
11. png
12. png
13. png
14. png
Поднимите доску
вверх и наклоните ее
на 15°–25°.
В верхнем положении
наклоните её на 45°.
Опустите доску вниз и
наклоните её на 15° - 25°.
В нижнем положении
наклоните её на 45°.
30.
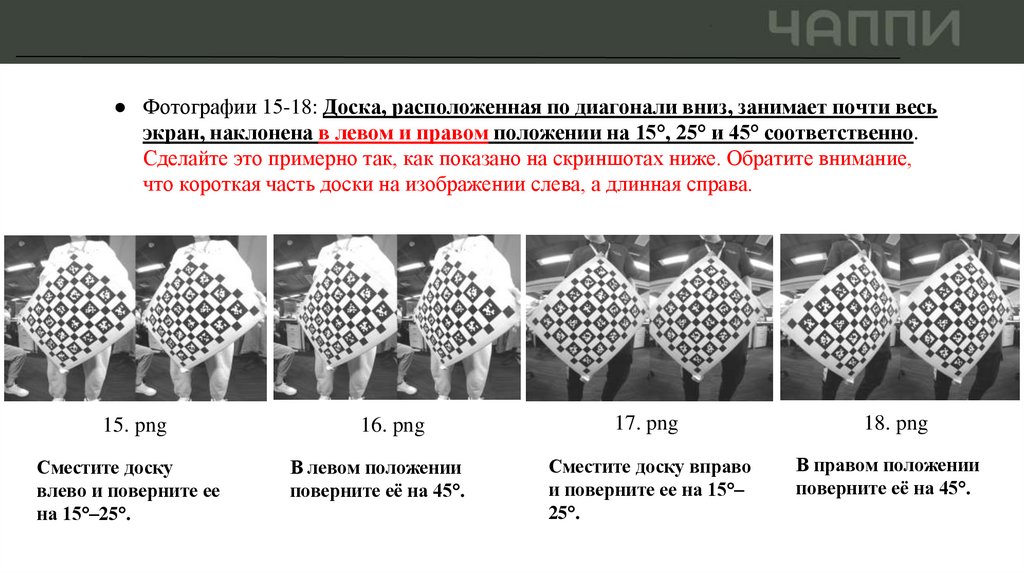
● Фотографии 15-18: Доска, расположенная по диагонали вниз, занимает почти весьэкран, наклонена в левом и правом положении на 15°, 25° и 45° соответственно.
Сделайте это примерно так, как показано на скриншотах ниже. Обратите внимание,
что короткая часть доски на изображении слева, а длинная справа.
15. png
Сместите доску
влево и поверните ее
на 15°–25°.
16. png
В левом положении
поверните её на 45°.
17. png
18. png
Сместите доску вправо
и поверните ее на 15°–
25°.
В правом положении
поверните её на 45°.
31.
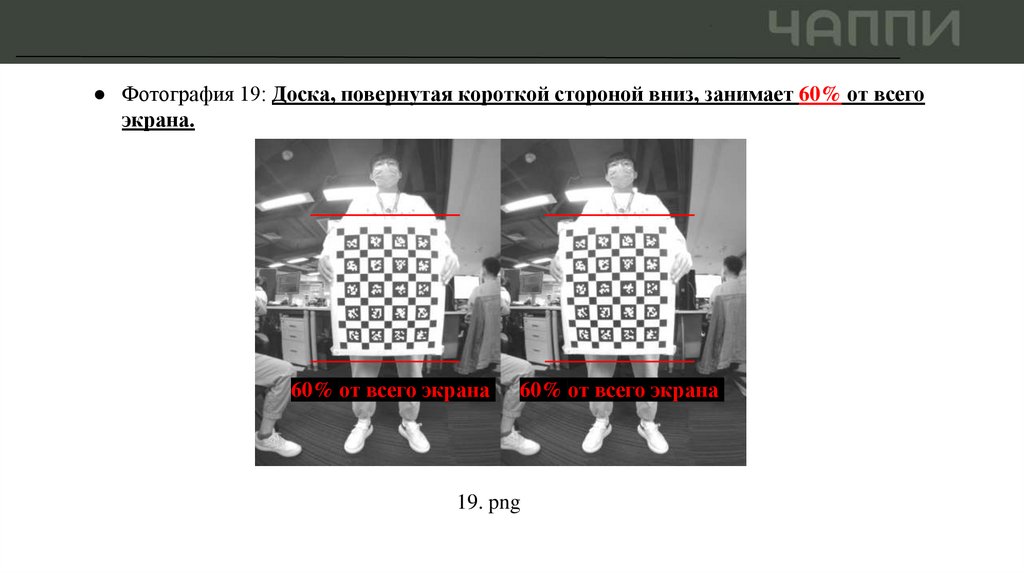
● Фотография 19: Доска, повернутая короткой стороной вниз, занимает 60% от всегоэкрана.
60% от всего экрана
60% от всего экрана
19. png
32.
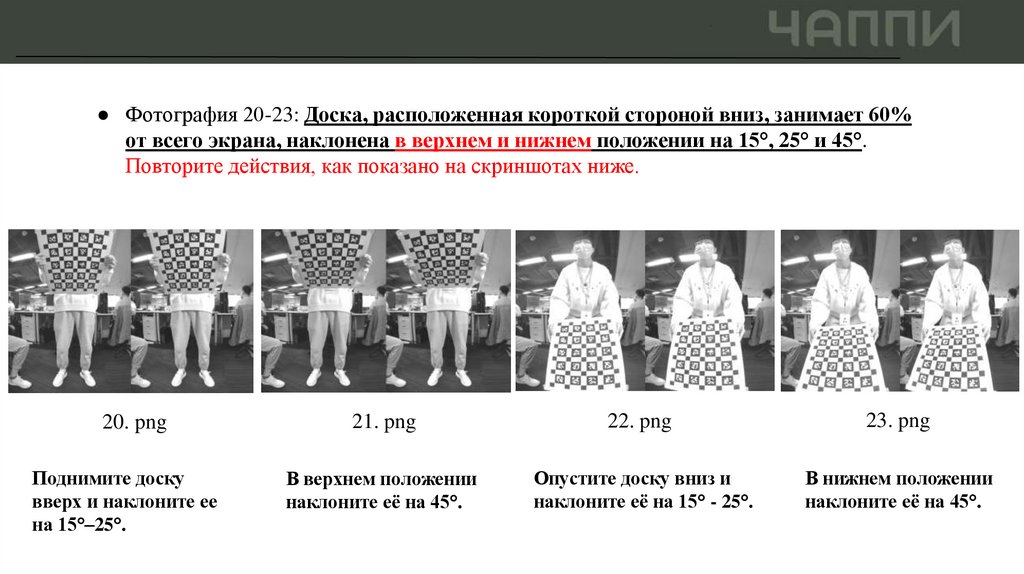
● Фотография 20-23: Доска, расположенная короткой стороной вниз, занимает 60%от всего экрана, наклонена в верхнем и нижнем положении на 15°, 25° и 45°.
Повторите действия, как показано на скриншотах ниже.
20. png
21. png
22. png
23. png
Поднимите доску
вверх и наклоните ее
на 15°–25°.
В верхнем положении
наклоните её на 45°.
Опустите доску вниз и
наклоните её на 15° - 25°.
В нижнем положении
наклоните её на 45°.
33.
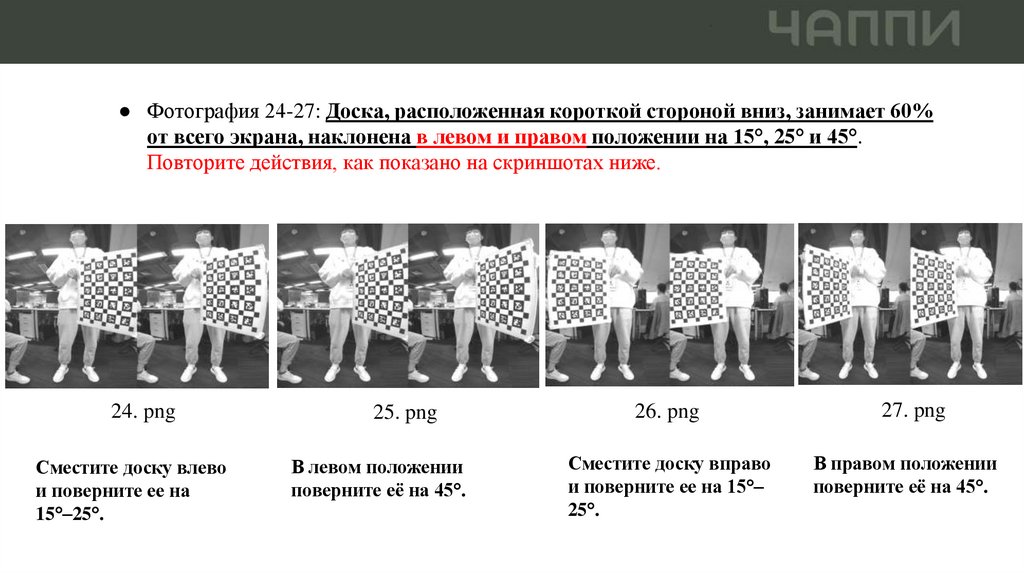
● Фотография 24-27: Доска, расположенная короткой стороной вниз, занимает 60%от всего экрана, наклонена в левом и правом положении на 15°, 25° и 45°.
Повторите действия, как показано на скриншотах ниже.
24. png
Сместите доску влево
и поверните ее на
15°–25°.
25. png
В левом положении
поверните её на 45°.
26. png
27. png
Сместите доску вправо
и поверните ее на 15°–
25°.
В правом положении
поверните её на 45°.
34.
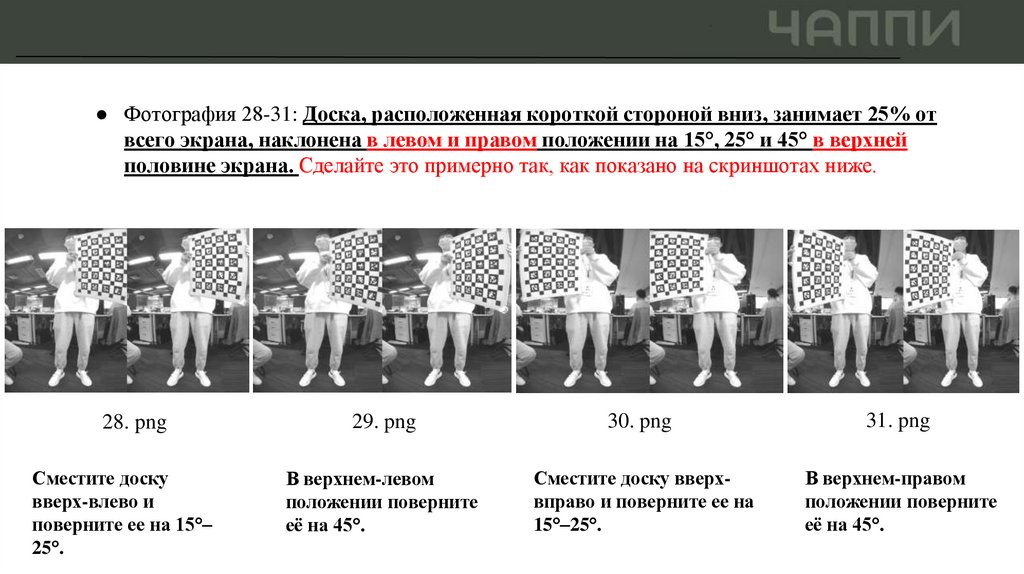
● Фотография 28-31: Доска, расположенная короткой стороной вниз, занимает 25% отвсего экрана, наклонена в левом и правом положении на 15°, 25° и 45° в верхней
половине экрана. Сделайте это примерно так, как показано на скриншотах ниже.
28. png
29. png
30. png
31. png
Сместите доску
вверх-влево и
поверните ее на 15°–
25°.
В верхнем-левом
положении поверните
её на 45°.
Сместите доску вверхвправо и поверните ее на
15°–25°.
В верхнем-правом
положении поверните
её на 45°.
35.
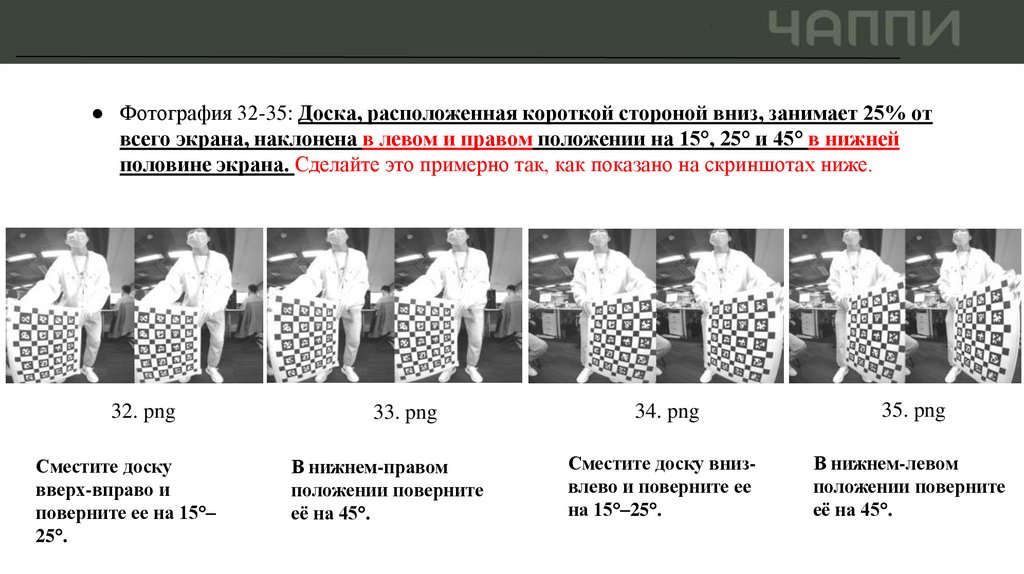
● Фотография 32-35: Доска, расположенная короткой стороной вниз, занимает 25% отвсего экрана, наклонена в левом и правом положении на 15°, 25° и 45° в нижней
половине экрана. Сделайте это примерно так, как показано на скриншотах ниже.
32. png
Сместите доску
вверх-вправо и
поверните ее на 15°–
25°.
33. png
В нижнем-правом
положении поверните
её на 45°.
34. png
35. png
Сместите доску внизвлево и поверните ее
на 15°–25°.
В нижнем-левом
положении поверните
её на 45°.
36.
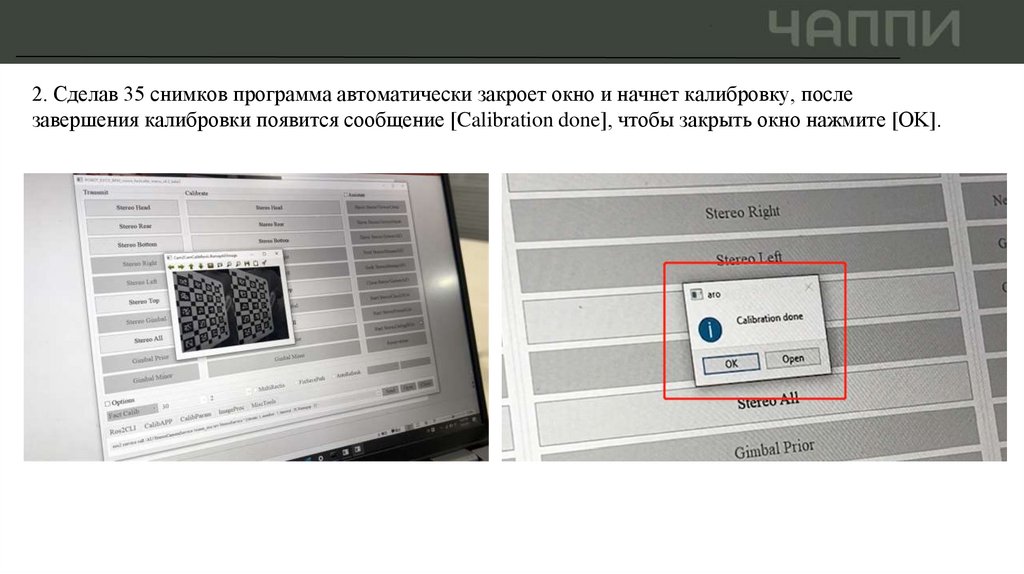
2. Сделав 35 снимков программа автоматически закроет окно и начнет калибровку, послезавершения калибровки появится сообщение [Calibration done], чтобы закрыть окно нажмите [OK].
37.
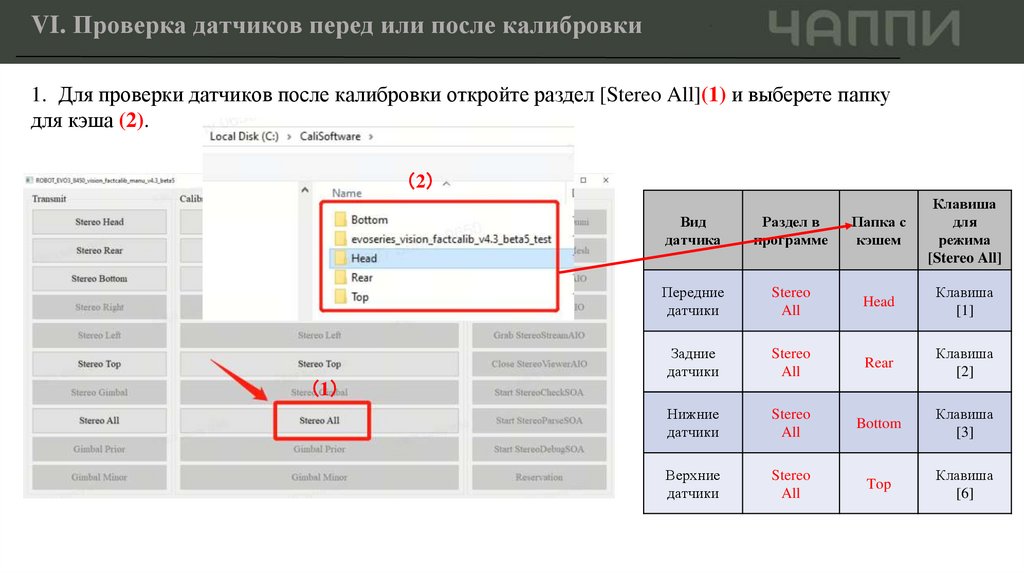
VI. Проверка датчиков перед или после калибровки1. Для проверки датчиков после калибровки откройте раздел [Stereo All](1) и выберете папку
для кэша (2).
2
1
Вид
датчика
Раздел в
программе
Папка с
кэшем
Клавиша
для
режима
[Stereo All]
Передние
датчики
Stereo
All
Head
Клавиша
[1]
Задние
датчики
Stereo
All
Rear
Клавиша
[2]
Нижние
датчики
Stereo
All
Bottom
Клавиша
[3]
Верхние
датчики
Stereo
All
Top
Клавиша
[6]
38.
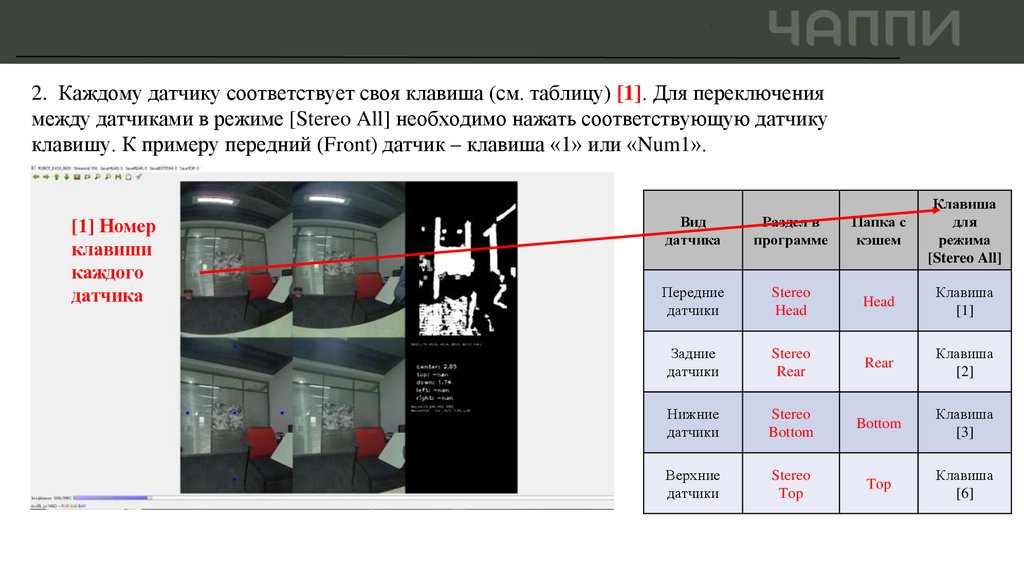
2. Каждому датчику соответствует своя клавиша (см. таблицу) [1]. Для переключениямежду датчиками в режиме [Stereo All] необходимо нажать соответствующую датчику
клавишу. К примеру передний (Front) датчик – клавиша «1» или «Num1».
[1] Номер
клавиши
каждого
датчика
Вид
датчика
Раздел в
программе
Папка с
кэшем
Клавиша
для
режима
[Stereo All]
Передние
датчики
Stereo
Head
Head
Клавиша
[1]
Задние
датчики
Stereo
Rear
Rear
Клавиша
[2]
Нижние
датчики
Stereo
Bottom
Bottom
Клавиша
[3]
Верхние
датчики
Stereo
Top
Top
Клавиша
[6]
39.
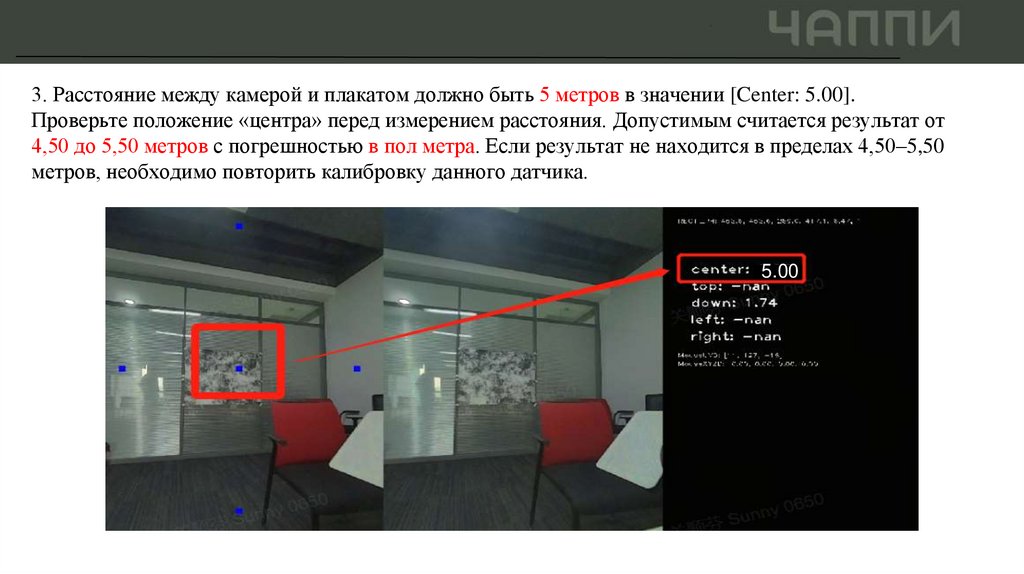
3. Расстояние между камерой и плакатом должно быть 5 метров в значении [Center: 5.00].Проверьте положение «центра» перед измерением расстояния. Допустимым считается результат от
4,50 до 5,50 метров с погрешностью в пол метра. Если результат не находится в пределах 4,50–5,50
метров, необходимо повторить калибровку данного датчика.
5.00
40.
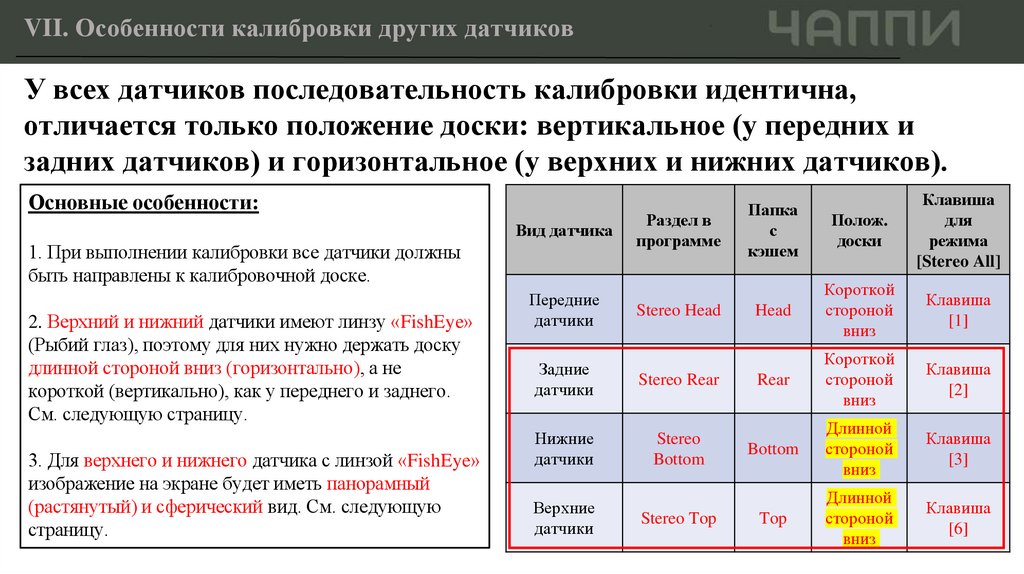
VII. Особенности калибровки других датчиковУ всех датчиков последовательность калибровки идентична,
отличается только положение доски: вертикальное (у передних и
задних датчиков) и горизонтальное (у верхних и нижних датчиков).
Основные особенности:
Вид датчика
1. При выполнении калибровки все датчики должны
быть направлены к калибровочной доске.
2. Верхний и нижний датчики имеют линзу «FishEye»
(Рыбий глаз), поэтому для них нужно держать доску
длинной стороной вниз (горизонтально), а не
короткой (вертикально), как у переднего и заднего.
См. следующую страницу.
3. Для верхнего и нижнего датчика с линзой «FishEye»
изображение на экране будет иметь панорамный
(растянутый) и сферический вид. См. следующую
страницу.
Передние
датчики
Раздел в
программе
Stereo Head
Задние
датчики
Stereo Rear
Нижние
датчики
Stereo
Bottom
Верхние
датчики
Stereo Top
Папка
с
кэшем
Полож.
доски
Клавиша
для
режима
[Stereo All]
Head
Короткой
стороной
вниз
Клавиша
[1]
Rear
Короткой
стороной
вниз
Клавиша
[2]
Bottom
Длинной
стороной
вниз
Клавиша
[3]
Top
Длинной
стороной
вниз
Клавиша
[6]
41.
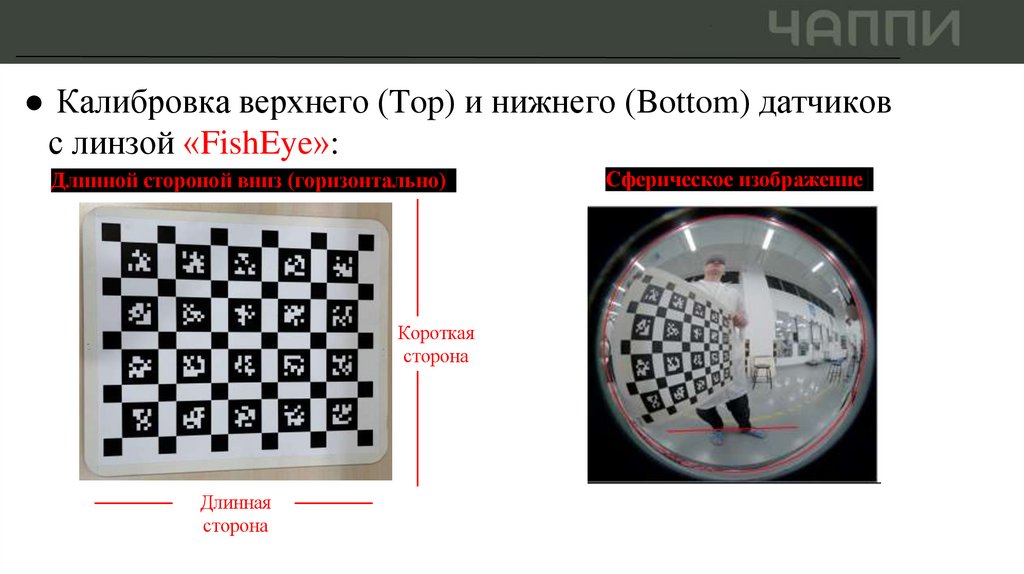
● Калибровка верхнего (Top) и нижнего (Bottom) датчиковс линзой «FishEye»:
Длинной стороной вниз (горизонтально)
Короткая
сторона
Длинная
сторона
Сферическое изображение
42.
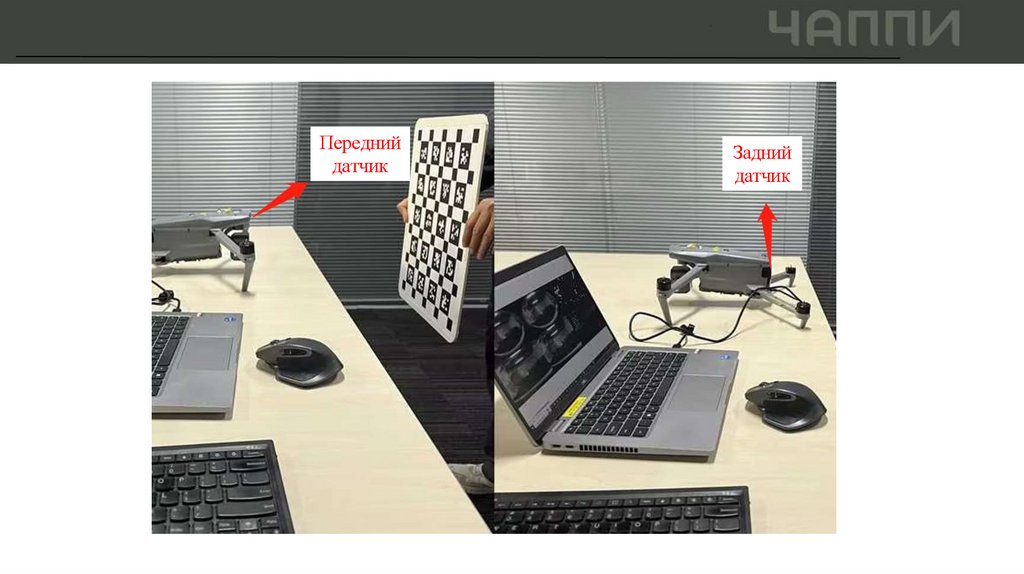
Переднийдатчик
Задний
датчик
43.
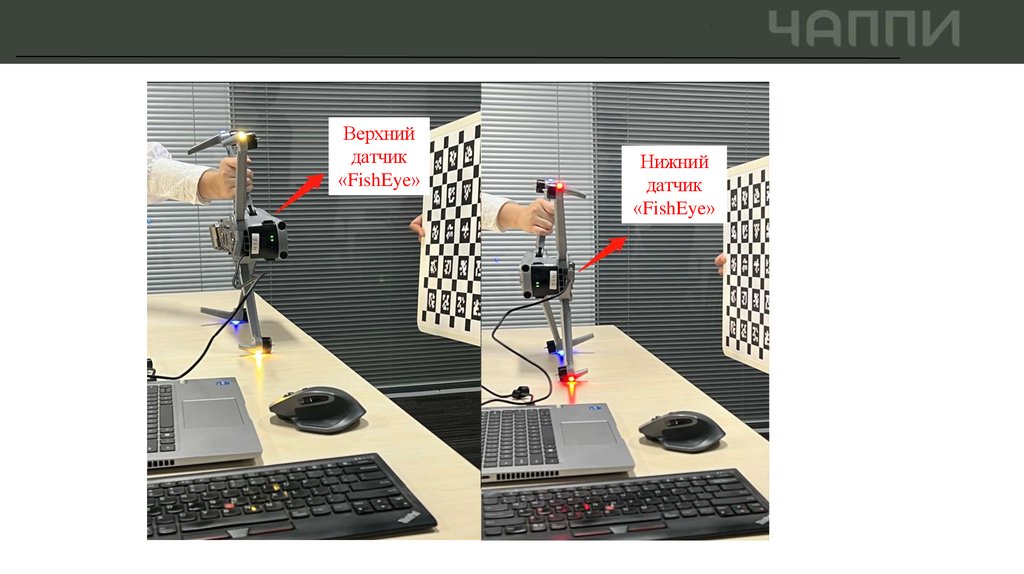
Верхнийдатчик
«FishEye»
Нижний
датчик
«FishEye»
44.
Обучение калибровке датчиков визуальногопозиционирования завершено
Спасибо!