









")
















")









 Реклама
РекламаПохожие презентации:










The DP Induction Course
1.
The DP INDUCTION COURSEModule 11
Satellite Navigation System
GNSS (Global Navigation Satellite Systems)
&
Differential systems
Handbook ver. 1
Wednesday, 11 February 2026
2. Global Navigation Satellite Systems
Several systems in use provided by variouscountries either alone or in co-operation with
others.
Serve a variety of users including Military,
Security, Aviation, Maritime & numerous Civilian
purposes.
Most commonly quoted and used is the GPS
system provided by the USA
Nb. Intention here is to provide a broad understanding of
its use for DP purposes and whilst it focuses on GPS
is generally applicable for any other systems
3. The GPS System
The GPS (Global Positioning System) is whollyowned and operated by the US Dept. of Defence
There is no technical or political input from any
other agency or nation
GPS encryption is not within our control
GPS signals may be jammed or “spoofed” by third
parties
GPS was made available to foreign civilian users
and declared fully operational on 17th July 1995
4. The GPS System
SYSTEM CONSISTS OF 3 OPERATIONALSEGMENTS
Space segment
Minimum 24 operational satellites
Control segment
Ground Control station
Ground monitor and uplink stations
User Segment
GPS receiver/processor equipment
5.
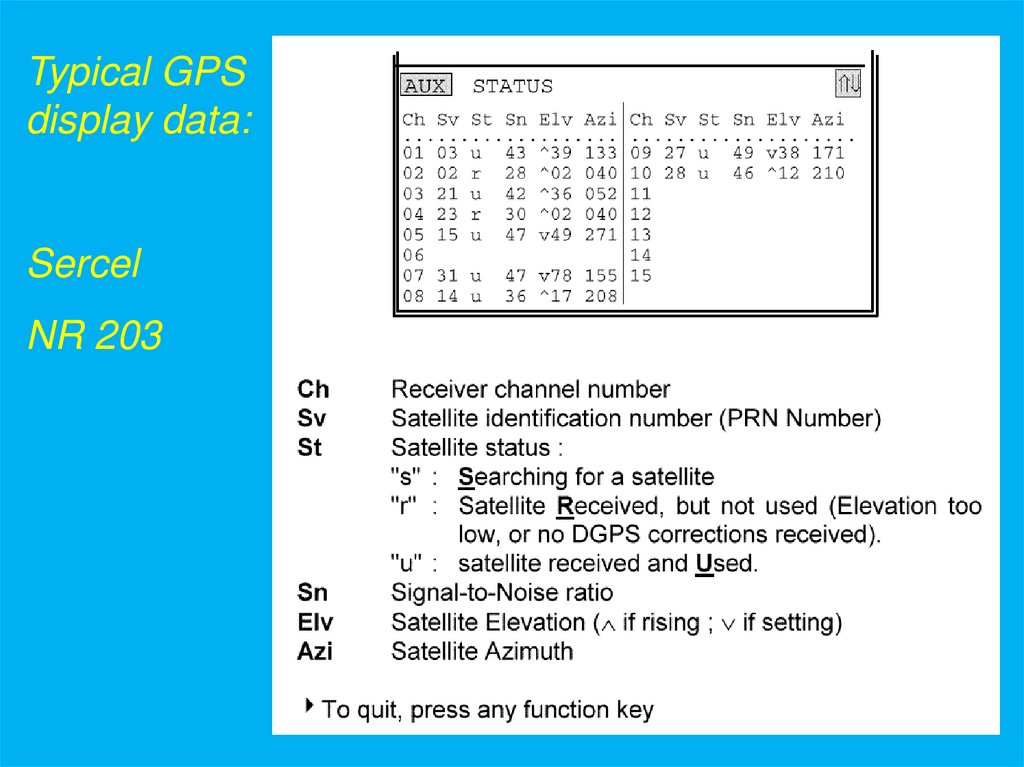
Typical GPSdisplay data:
Sercel
NR 203
6. GPS accuracy
GPS positioning accuracyC/A (Course Acquisition) code +/- 20m
Military P (Precise) code
Accuracy dependant on:
Satellite orbit
Atmospheric path propagation
Clock stability
Multipath signals
Satellite numbers (min 4)
Satellite geometry
Selective Availability
+/- 10m
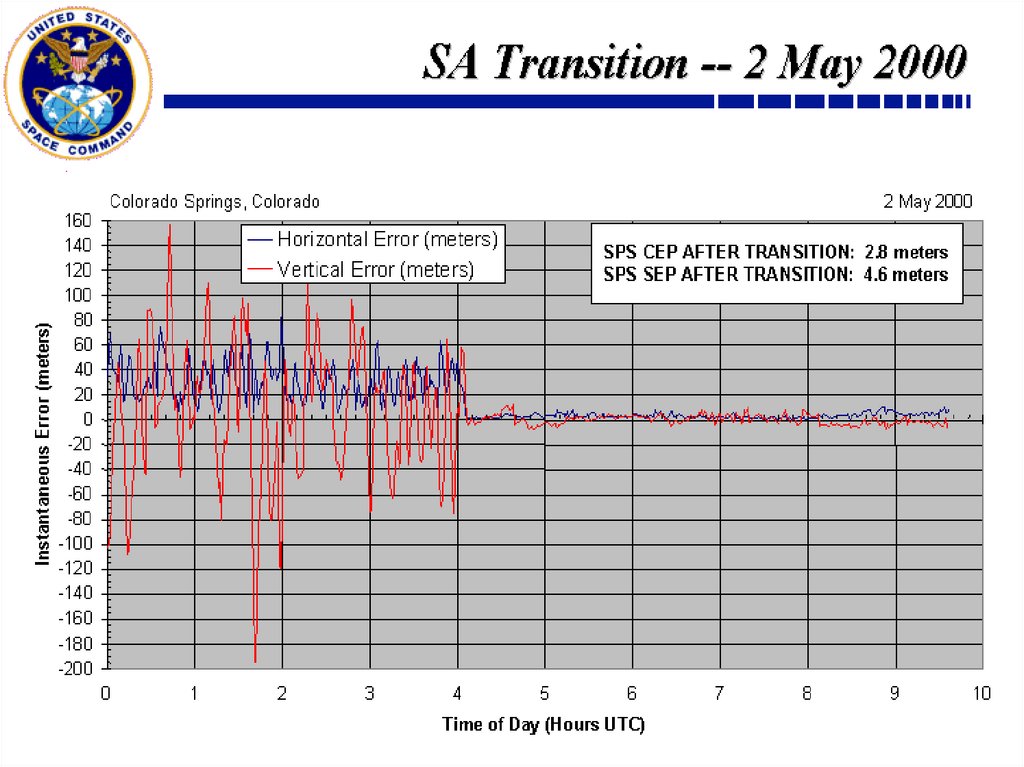
7. The removal of SA from the GPS transmissions
SA (Selective Availability) is a deliberatedowngrading of GPS data quality for civilian
users, imposed by the US DoD
SA set to zero on 2nd May 2000 at 0400 UTC
US DoD reserves right to re-apply SA
This does NOT give civilian users access to the
P-code transmissions
8.
9. The effects of the removal of SA
May 1st 2000, with SA100m
May 3rd 2000, without SA
100m
10. SATELLITE GEOMETRY
THE LOWER THE SVELEVATION, THE
GREATER THE
HORIZONTAL
RESOLUTION
HDOP = HORIZONTAL
DILUTION OF
PRECISION
N
N
10 DEGREE
ELEVATION
MASK
GPS
SATELLITES
ZENITH
ZENITH
W
E
W
S
S
POOR GEOMETRY
HIGH VALUE OF
HDOP (>5)
E
GOOD GEOMETRY
LOW VALUE OF
HDOP (<3)
11. Differential GPS
12. What is DGPS ?
All satellites are observed from a fixed location ReferenceStation
Reference Station location is accurately known, thus
accurate ranges may be CALCULATED
The Reference Station also MEASURES ranges to all
satellites
The Reference station compares MEASURED and
CALCULATED ranges. The differences are the range errors
Corrections for these errors are computed
Transmits DGPS correction signals to users
The user system is able to update its PSRs to increase
accuracy
13. DIFFERENTIAL GPS PRINCIPLE
GPS SVsDIFFERENTIAL
GPS PRINCIPLE
GPS position calculated at
vessel
GPS position
calculated at Ref
station
Corrected position
computed at vessel
Corrections
computed and
transmitted to
vessel
NOTE: This is a “Single
Reference station” solution
14. The IALA Beacon Network (UK System)
DGPS correction signals available free of chargeTransmission of corrections via MF radio network
Single reference station solutions
Correction update rate 5 - 10 sec
Correction Age of Data (AOD)
Typical accuracies:
15 sec
<200 km 5 - 10m (68% drms)
Operational ranges
by day up to 100km
by night or in poor atmospheric conditions - down to
50km or even zero!
Overall poor reliability. Unsuitable for mainstream DP
15. Network DGPS
An array of Reference stations provides a NetworkEach station computes its own corrections
Corrections sent to a central Hub Control station
Corrections multiplexed (compressed into a single signal)
Corrections transmitted by radio/satellite system
Corrections received on board, where a Multi-reference
solution is computed
Real-time QA monitoring provides system warnings
16. Network Differential GPS
GPS SVGPS signals
received by vessel,
Hub station and all
Reference stations
Reference station
network
Hub or Master
reference station
Network Differential GPS
17. Network Differential GPS
GPS SVRef station data transmitted to
the Hub
Network Differential GPS
18. Network Differential GPS
GPS SVINMARSAT
SV
Multiplexed corrections transmitted
to user vessel
Vessel system computes best
solution related to vessel position
and distances to ref ststions
Network Differential GPS
19. Differential Corrections
Correction data may be transmitted to the user by avariety of media.
HF/MF
- range 400 - 800 km
Inmarsat link
- worldwide coverage on low power
Spotbeam link
- high power “local” coverage
UHF
- range 40 km (line of sight)
NB. UHF link usually related to a temporary reference station
located on a platform
20. Platform-based UHF reference
GPS SVsREFERENCE
STATION
LOCATED ON
PLATFORM
DIFFERENTIAL CORRECTIONS
BY UHF TELEMETRY
21. Fugro SeaSTAR Network
Transmission of corrections via Inmarsat or SpotbeamWide-area multi-reference DGPS network of over 100
stations
Manned reference Hub/Monitor stations at Aberdeen,
Houston and Perth
Dual-frequency service available (SeaSTAR Plus)
Multi-reference solution computed on board using multiple
reference station corrections (centralised network)
Typical accuracies:
< 500km
- 1 - 3m
<1000 km - 2 - 4m
22. Fugro SeaSTAR Network Low power Inmarsat service
23. DUAL-FREQUENCY DGPS
Intended to counter effects of localisedionospheric interference (scintillation)
Dual-frequency reference station monitors
L1 and L2
L1 & L2 suffer different delays due to
ionospheric activity
The FUGRO SeaStar Plus is dual-frequency
24. GNSS system problems - Sunspot activity
Magnitude largest in equatorial areasActivity might affect GPS (and communications)
Magnitude varies with sunspot cycle
Roughly follows an 11 year cycle
25. Ionospheric Disturbances
26. DUAL-FREQUENCY DGPS
SATELLITEEXTREME
REFRACTION
CAUSED BY
SUNSPOT ACTIVITY
REFRACTION
L1
USER
L2
REFRACTION
L2
THESE ARE
ALL KNOWN
VARIABLES
USER
L1
USER
CORRECTED
REFRACTION
CORRECTED
ENABLING
CORRECTION AT THE
USER LOCATION
REFERENCE
STATION
USER
VESSEL
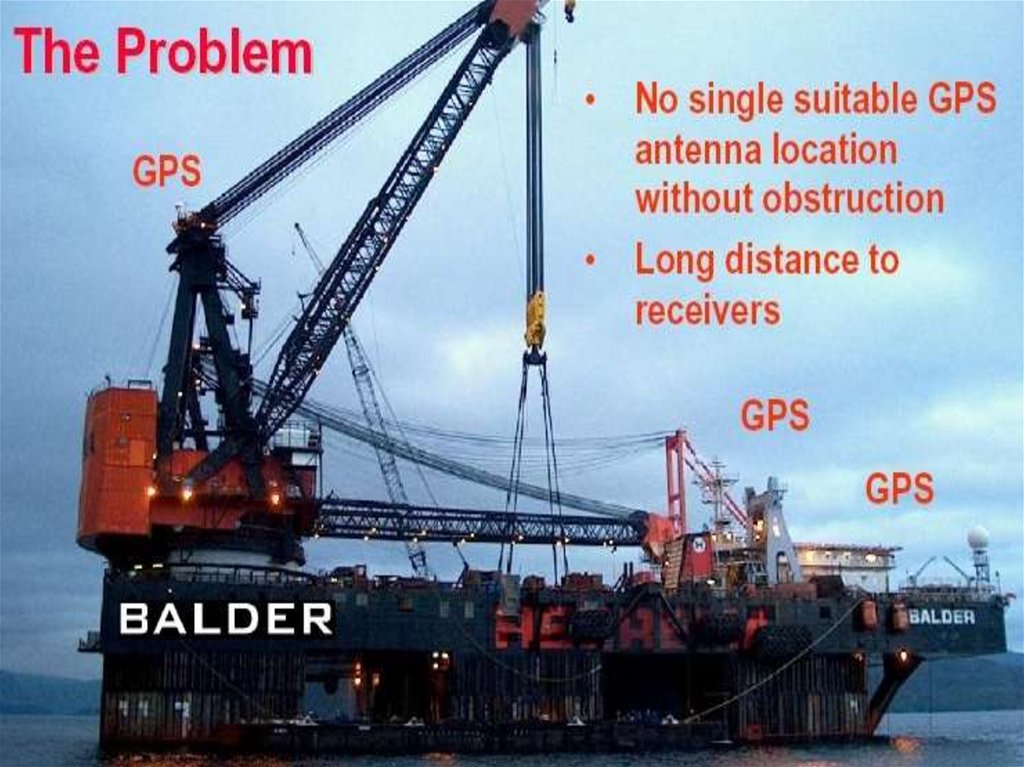
27. DGPS for DP - problems
Proximity of large structures/vesselsMasking or loss of GPS or correction
signals
Multipath errors
Poor satellite geometry
Sunspot activity
Quality of correction data - AOD and long
distances
Operator induced problems !
28. GPS Multi-path problems
GPS SATELLITESREFLECTED SIGNALS
MAY COMBINE WITH
DIRECT SIGNALS,
CAUSING FADING AND
SIGNAL LOSS
GPS Multi-path
problems
REFLECTED
SIGNAL
REFLECTION
CAUSES RANGE
JUMP
GPS SIGNALS
BLOCKED BY
STRUCTURE
DP CRANE BARGE
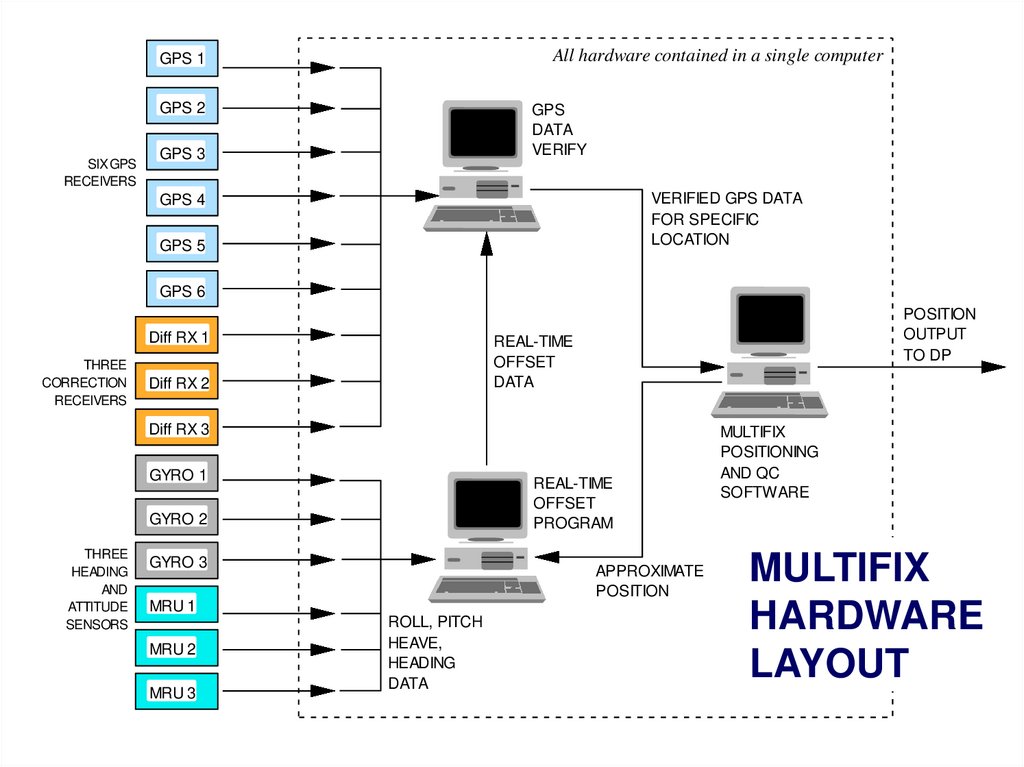
29. Multifix
A solution to a specific problem areaIn some vessels, antenna location can be
poor causing shadowing and major
multipath
Multifix combines input from multiple GPS
receivers
Antennae can be widely separated
Position data combined and pooled to
provide PRS input to DP
30.
31.
All hardware contained in a single computerGPS 1
GPS 2
SIX GPS
RECEIVERS
GPS
DATA
VERIFY
GPS 3
VERIFIED GPS DATA
FOR SPECIFIC
LOCATION
GPS 4
GPS 5
GPS 6
Diff RX 1
THREE
CORRECTION
RECEIVERS
POSITION
OUTPUT
TO DP
REAL-TIME
OFFSET
DATA
Diff RX 2
Diff RX 3
GYRO 1
REAL-TIME
OFFSET
PROGRAM
GYRO 2
THREE
HEADING
AND
ATTITUDE
SENSORS
GYRO 3
APPROXIMATE
POSITION
MRU 1
MRU 2
MRU 3
ROLL, PITCH
HEAVE,
HEADING
DATA
MULTIFIX
POSITIONING
AND QC
SOFTWARE
MULTIFIX
HARDWARE
LAYOUT
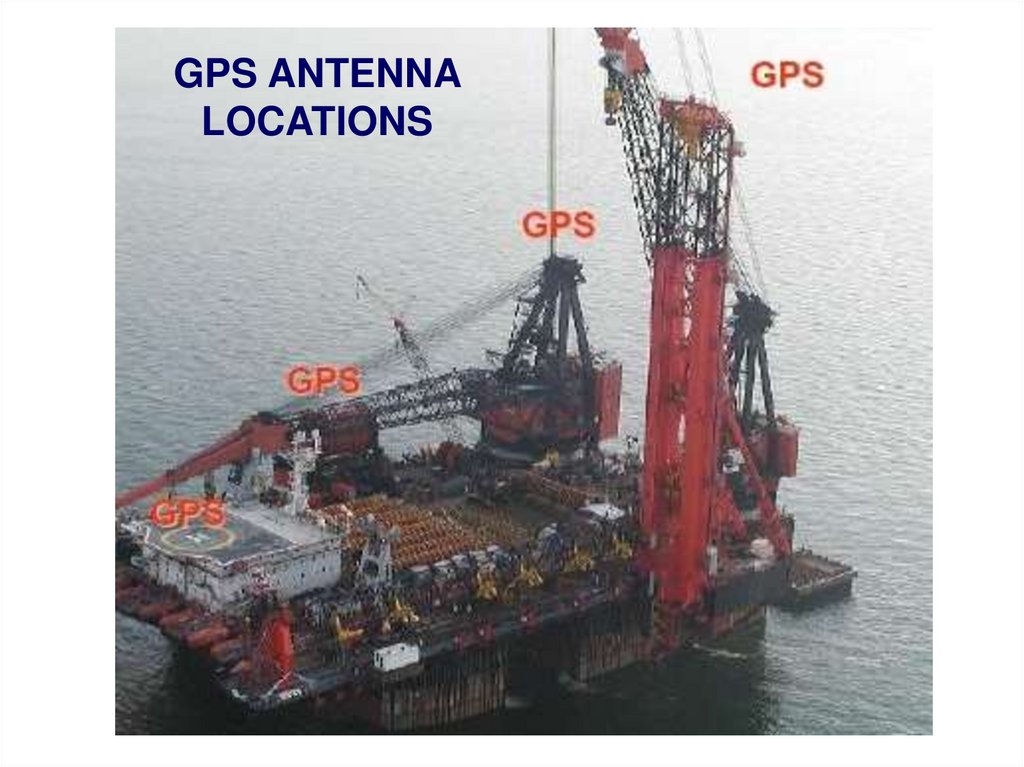
32.
GPS ANTENNALOCATIONS
33. Multifix operational observations
Position very stable and reliablePosition stability not affected by multipath
and variable obstructions on working vessel
DPOs can effectively manage the system
34. Relative GPS (DARPS)
GPS POSITIONREFERENCE
GPS POSITION
REFERENCE
TURRET-MOORED FPSO
TELEMETRY
DATA LINK
SHUTTLE TANKER
TURRET
FPSO USING THRUSTER
ASSISTED MOORING ON
A WEATHERVANE HEADING
MOORING
LINES
LOADING HOSE
FPSO
OFFTAKE
REFERENCE
POINT
RISERS
SYSTEM ALLOWANCES MADE FOR
ANTENNA/REFERENCE POINT OFFSETS
FINAL DATA GIVES RANGE AND
BEARING ACROSS LOADING HOSE
35. Relative GPS
G-Vec is an Absolute and Relativeposition and heading reference
36. DGPS accuracy
Typical overall accuracy: 1 – 3mDependent on:
Single or Dual-frequency service
Age of corrections (AOD or “latency”)
Distances from Reference stations
Single or multi-reference station solution
SV geometry (HDOP value)
Presence/absence of ionospheric disturbances
37. IMCA DQI Differential Quality Index
DQI is a factor indicating the quality of thedifferential positioning ability
DQI is used by the DP system as an alarm and
rejection criterion
38. GNSS - other satellite-based systems
GLONASSThe “Galileo” system
39. The GLONASS system
Russian system comparable to GPSNo Selective Availability
Satellite orbital inclination of 65° giving improved
coverage in polar regions
Full space segment of 24 satellites
Dual GPS/GLONASS receivers available
Differential GLONASS solutions in place
Maintenance & repair is underway
Improved satellites:
Glonass-M satellites with a predicted life of 7
years (earlier satellites 3 years)
Glonass-K satellites, 10 years
40. GNSS - other satellite-based systems
GLONASSThe “Galileo” system
41. The “Galileo” system
A new satellite-based navigation system fullyequivalent to the GPS system is under
development
Owned and controlled by the EU
4 satellites currently in orbit
Further 6 launches planned for 2014
30 operational satellites planned by 2019
Orbital inclination 56°
Currently under test
42. GNSS - other satellite-based systems
GLONASSThe “Galileo” system
Other countries with GNSS systems
include:
China
- Compass/Beidou
India
- GAGAN (primarily for airspace)
- Quasi-Zenith Satellite System (QZSS)
Japan
43. GNSS - Pros and Cons
ADVANTAGESWorldwide, 24 hour coverage
Accurate system
Data free of charge
Shipboard equipment cheap and simple to operate
Globally referenced systems
DISADVANTAGES
Stability problems close to large structures
Differential services expensive
AOD or Latency values may be unacceptably high
Ionospheric activity problems