


 Электроника
ЭлектроникаПохожие презентации:





")




Асинхронный тяговый привод
1.
Доктор техн. наук,профессор
Щуров Николай Иванович
2.
Недостатки ТЭД постоянного тока:1. являются напряженными в коммутационном и
тепловом отношении;
2. щеточный узел ненадежен.
Бесколлекторные ТЭД:
1. допускают большую частоту вращения;
2. имеют меньшую массу;
3. отсутствует скользящий контакт
1
3.
2Что затрудняло применение асинхронных тяговых
двигателей:
1. Квадратичная зависимость вращающего
момента от приложенного напряжения;
2. громоздкость, сложность и ненадежность ранее
существующих преобразователей;
3. Значительное расхождение нагрузок между
параллельно работающими ТЭД.
4.
3Применение современных полупроводниковых
приборов решило проблему использования
асинхронных ТЭД на новой технической основе.
С помощью устройств, называемых инверторами
преобразуют постоянный ток в трехфазный
переменный регулируемой частоты.
Регулирование режимов работы АТД заключается
в преобразовании по заданным законам
напряжения и тока источника питания в систему
напряжения и тока требуемого для питания
обмоток бесколлекторного двигателя.
5.
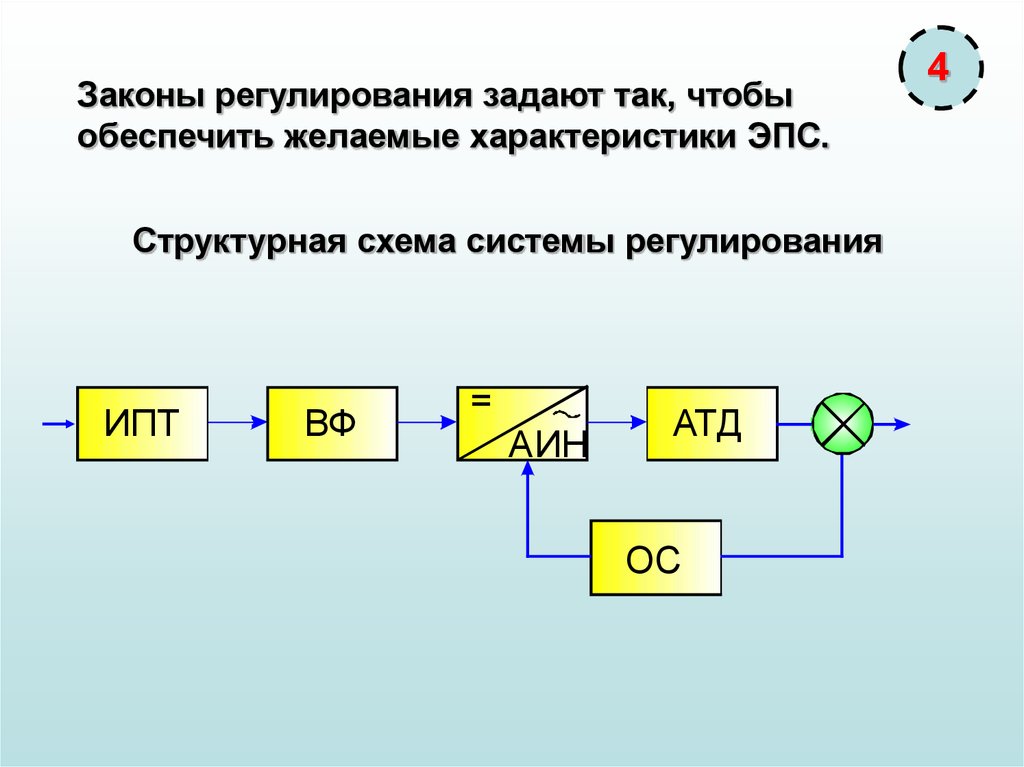
Законы регулирования задают так, чтобыобеспечить желаемые характеристики ЭПС.
Структурная схема системы регулирования
ИПТ
ВФ
=
АИН
АТД
ОС
4
6.
-+
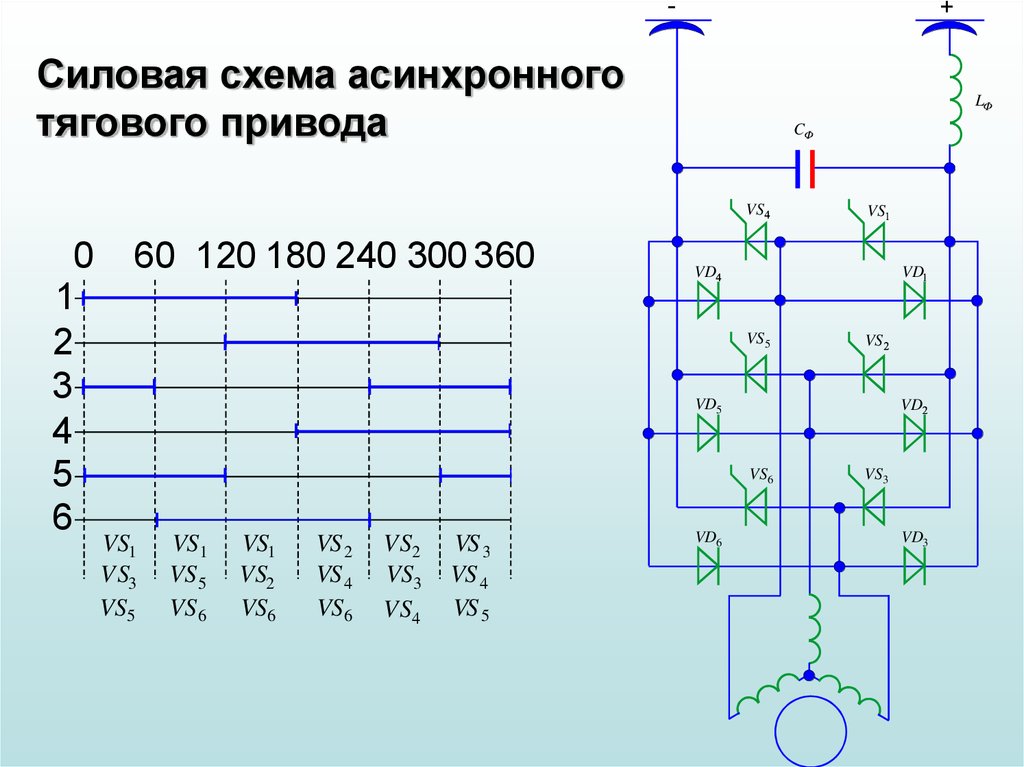
Силовая схема асинхронного
тягового привода
L
C
VS
0
1
2
3
4
5
6
60 120 180 240 300 360
VS
VD
VD
VS5
VS
VD5
VD
VS6
VS1
VS3
VS5
VS 1
VS 5
VS 6
VS1
VS2
VS6
VS 2
VS 4
VS6
VS2
VS3
VS4
VS 3
VS 4
VS 5
VD6
VS3
VD3
7.
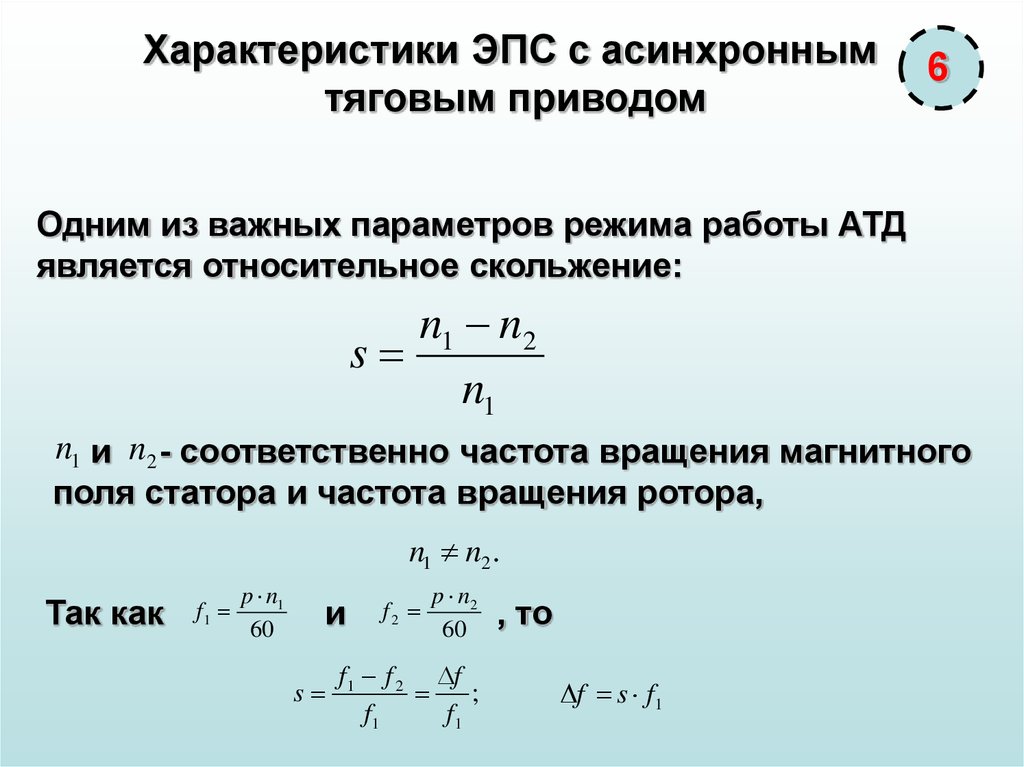
Характеристики ЭПС с асинхроннымтяговым приводом
6
Одним из важных параметров режима работы АТД
является относительное скольжение:
n1 n2
s
n1
n1 и n2 - соответственно частота вращения магнитного
поля статора и частота вращения ротора,
n1 n2 .
Так как
f1
p n1
60
и
s
f2
p n2
60
f1 f 2 f
;
f1
f1
, то
f s f1
8.
f f1 f 2 - абсолютная частота скольжения ротора.Именно эту частоту f имеет Э.Д.С. наводимая в
7
роторе АТД.
Относительное скольжение меняется от s 1 при
неподвижном роторе, до s 0 , соответствующей
синхронной скорости.
Рабочей частью моментной характеристики М(s) АТД
является отрезок изменения скольжения от s 0
до s sкр , за которым лежит область неустойчивой
работы
9.
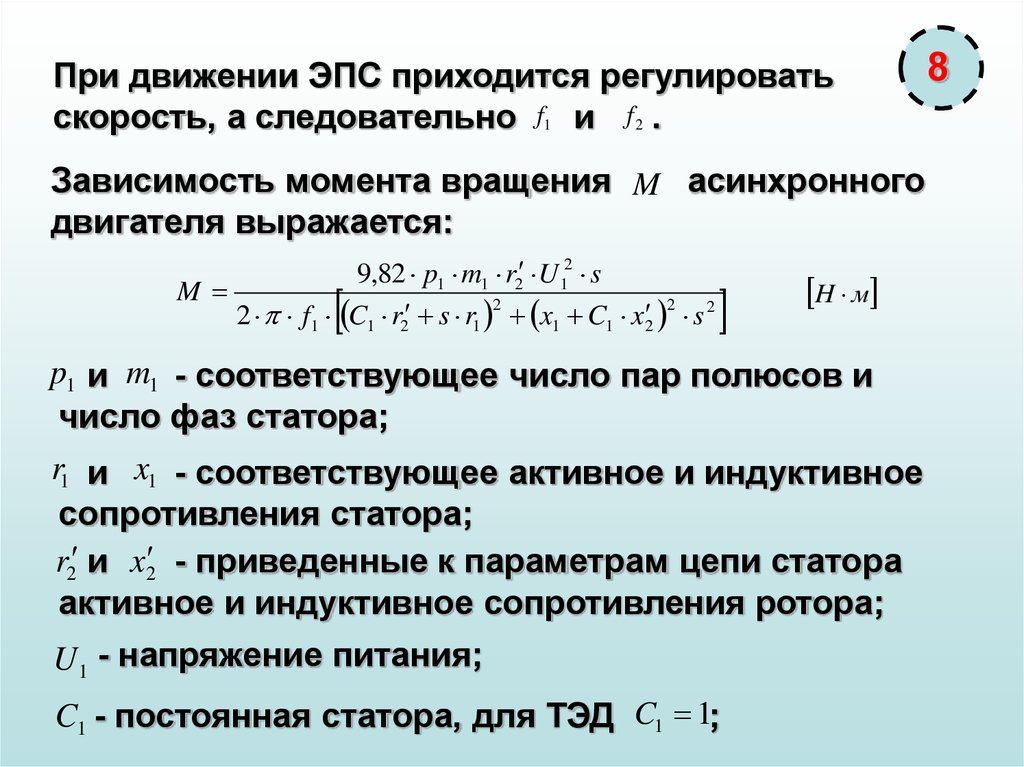
При движении ЭПС приходится регулироватьскорость, а следовательно f1 и f 2 .
Зависимость момента вращения M асинхронного
двигателя выражается:
9,82 p1 m1 r2 U 12 s
M
2
2
2 f1 C1 r2 s r1 x1 C1 x2 s 2
H м
p1 и m1 - соответствующее число пар полюсов и
число фаз статора;
r1 и x1 - соответствующее активное и индуктивное
сопротивления статора;
r2 и x2 - приведенные к параметрам цепи статора
активное и индуктивное сопротивления ротора;
U1 - напряжение питания;
C1 - постоянная статора, для ТЭД C1 1;
8
10.
В силу того, что s в нормальном режиме относительно мало, то s 2 09
Принебрегая малым активным сопротивлением
обмотки статора r1 0 (тогда r1 r2 s 0 )
C U12 s
M
,
f1
где C 9,82 p1 m1
2 r2
Так как в процессе работы ЭПС, вращающий момент
АТД меняется в широких пределах, то важно
обеспечить условие:
Pmin PM PC P2 min const
PM PC - не зависят от тока ротора I 2
11.
Потери в роторе P2 M 1 2 , где1
2 f1
;
p
2
2 f2
p
1 2 - абсолютное скольжение ротора, c 1.
Тогда потери в роторе:
P2
2
M f
p
Следовательно, условие Pmin const требует того,
чтобы абсолютная разность частот f вращения
поля статора f1 и ротора f 2 была минимальной во
всех режимах работы АТД
f f1 f 2 min const
10
12.
Чтобы выявить способы реализации этогоусловия сопоставим два режима нагрузки АТД
Режим 1
f f2
U 1 , f1 , s1 1
f1
и
U12 f1 f 2
M1 C
f12
Режим 2
2
U1 f1 f 2
и M 1 C
f1 2
Так, как f1 f 2 f1 f 2 const
f f 2
U 1 , f1 , s1 1
f1
Отношение вращающихся моментов для
рассматриваемых режимов составит:
M1
U12 f1 f 2
f1
U12 f1
C
C
2
2
2
2
M 1
f1
U1 f1 f 2 U1 f1
2
Отсюда
U1
f
M1
1
U1
f1 M 1
2
11
13.
Следовательно оптимальный режим работы АТДопределяется соотношением трех его параметров:
12
U1 , f1 , M1
Изменяя соотношение между этим параметрами по
определенному закону можно обеспечит работу с Pmin,
т.е. с наибольшими к.п.д. и cos
Режим работы ЭПС характеризуется V и F, то
U1 V1
F1
U1 V1 F1
14.
Реализация режимов движения ЭПС:13
Режим пуска M const; FП const
M Ф I 2 , где I 2 - ток ротора, приведенный к цепи
статора.
При Ф const будет и I 2 const
Постоянство момента и силы тяги равносильно
таким образом I1 const . Это значит, что в течении
времени пуска ток статора должен быть
неизменным, если необходимо обеспечить F1 F 1 ,
1
тогда необходимо повышать напряжение
приложенное к статору пропорционально скорости
U 1 V1
U 1 V1
15.
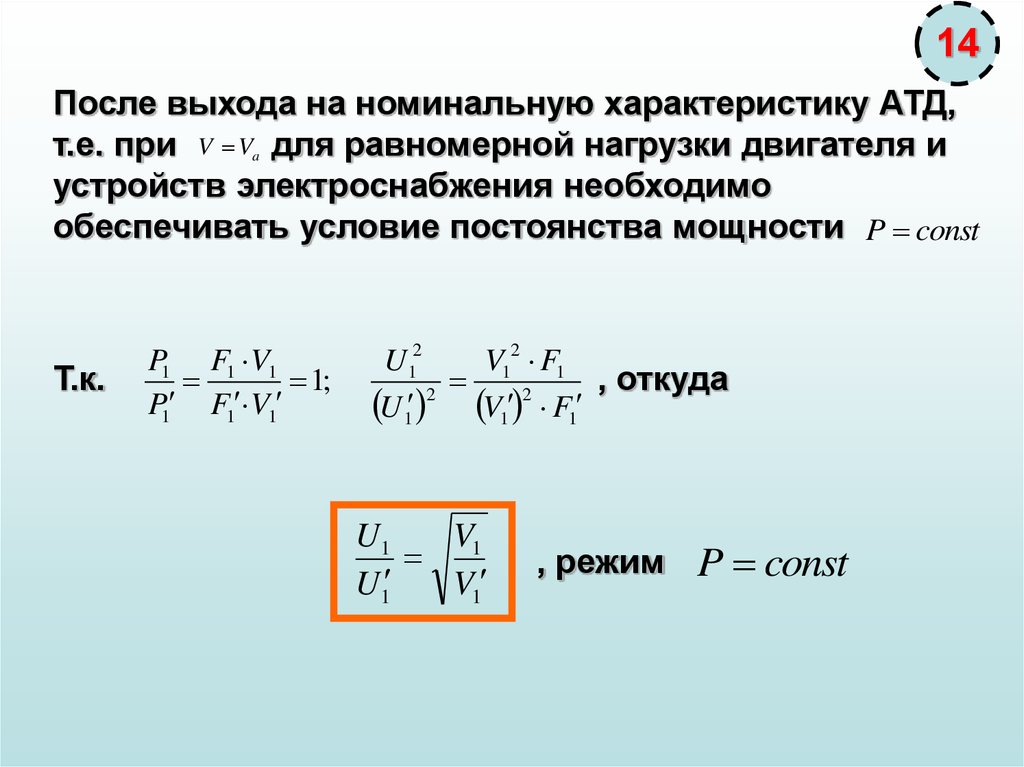
14После выхода на номинальную характеристику АТД,
т.е. при V Va для равномерной нагрузки двигателя и
устройств электроснабжения необходимо
обеспечивать условие постоянства мощности P const
Т.к.
P1 F1 V1
1;
P1 F1 V1
U 12
V12 F1
, откуда
2
2
U1 V1 F1
U1
V1
U1
V1
, режим
P const
16.
15Режим постоянства скорости равносилен условию
постоянства частоты
f1
1
f1
и
U1
F1
U1
F1
Режим постоянства напряжения на АТД U1 const ,
т.е. U1 1 обеспечивается законом регулирования
U 1
V12
F1
V1 2 F1
17.
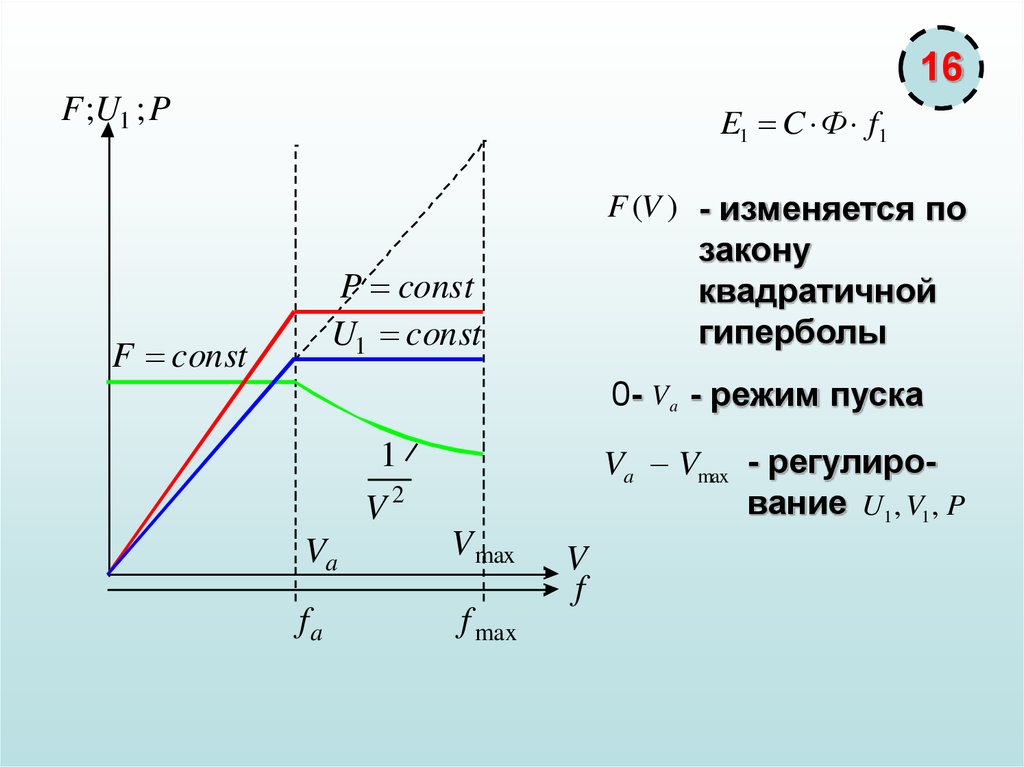
16F ;U1 ; P
E1 C Ф f1
F (V ) - изменяется по
закону
квадратичной
гиперболы
P const
U1 const
F const
0- Va - режим пуска
Va Vmax - регулирование U1 , V1 , P
1
V2
Va
V max
fa
f max
V
f
18.
17+
-
И1
1
И2
2
И4
И3
3
4
БУИ
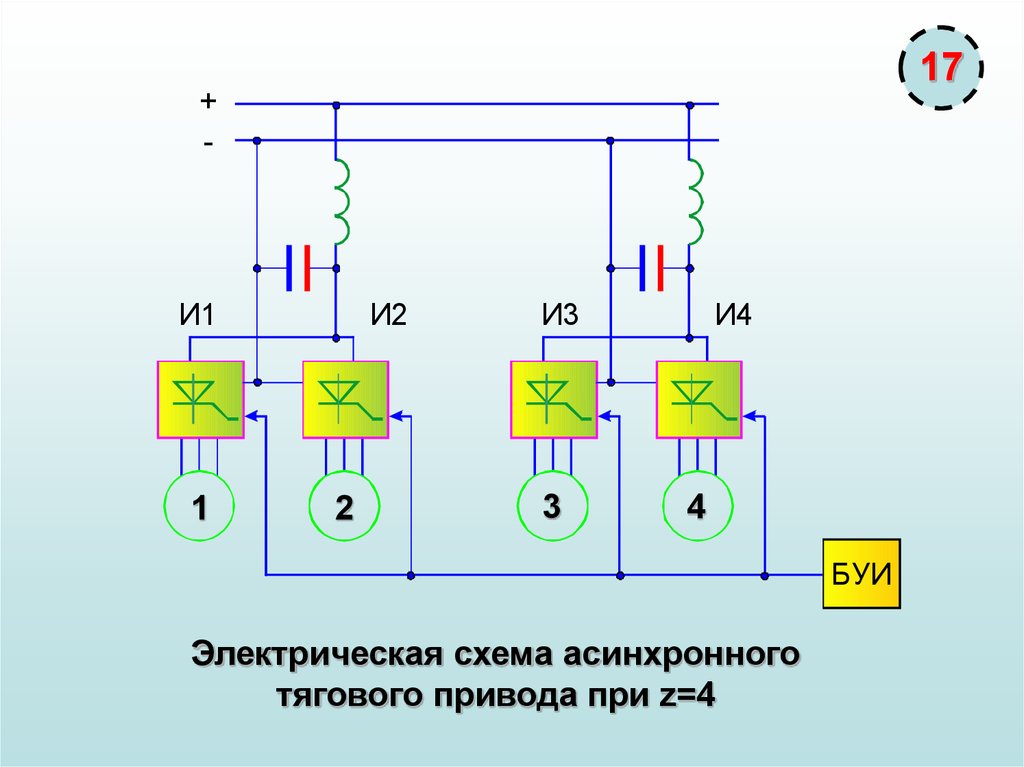
Электрическая схема асинхронного
тягового привода при z=4