



 Электроника
ЭлектроникаПохожие презентации:








")

Электрический привод. Асинхронный электропривод
1. ЭЛЕКТРИЧЕСКИЙ ПРИВОД
2.
ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКАПростые модели асинхронного электропривода
Сложности при получении полного математического описания процессов в асинхронной
машине:
1) все напряжения, токи, потокосцепления – переменные, т.е. характеризуются частотой,
амплитудой, фазой или соответствующими векторными величинами;
2) взаимодействуют движущиеся контуры, взаимное расположение которых изменяется в
пространстве;
3) магнитный поток нелинейно связан с намагничивающим током (проявляется насыщение
магнитной цепи), активные сопротивления роторной цепи зависят от частоты (эффект
вытеснения тока), сопротивления всех цепей зависят от температуры и т.п.
Синхронная угловая скорость
Частота вращения
2 f 1
p
60 f 1
n0
p
0
При питании от сети f1=50Гц синхронная частота вращения может быть 3000, 1500,
1000, 750, 600... об/мин в зависимости от конструкции машины
3.
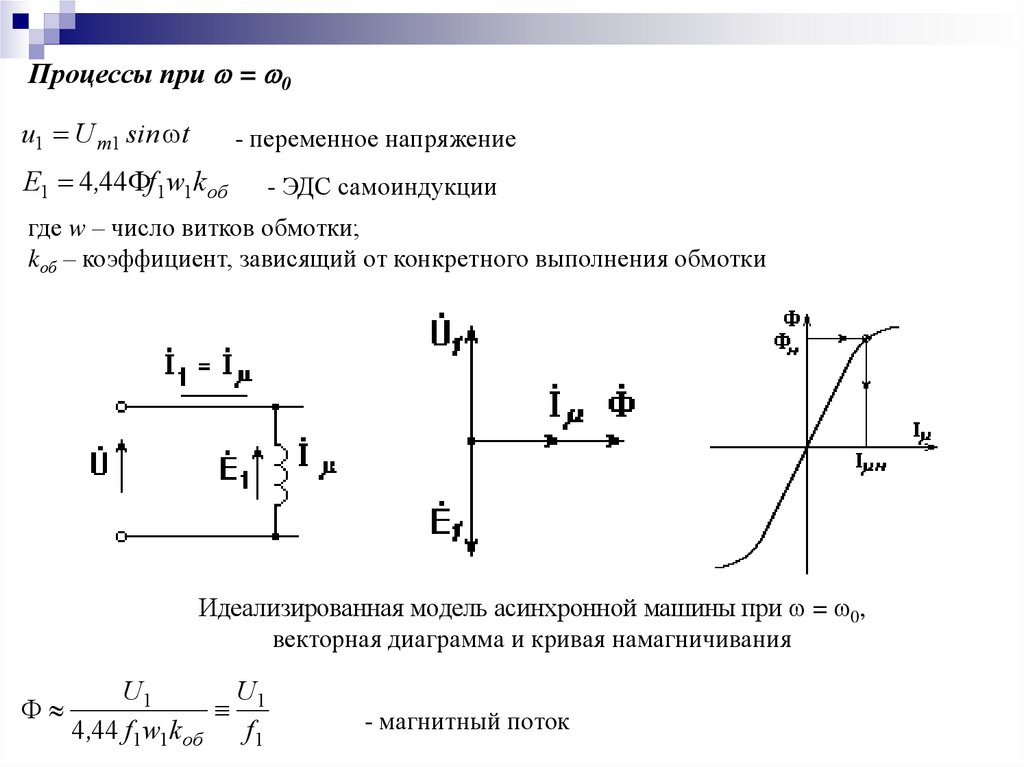
Процессы при = 0u1 U m1 sin t
- переменное напряжение
E1 4 ,44 f 1w1kоб
- ЭДС самоиндукции
где w – число витков обмотки;
kоб – коэффициент, зависящий от конкретного выполнения обмотки
.
Идеализированная модель асинхронной машины при = 0,
векторная диаграмма и кривая намагничивания
U1
U1
4 ,44 f 1w1k об
f1
- магнитный поток
4.
Процессы под нагрузкой0
s
0
- скольжение
Е 2 = E s
1
- ЭДС, наведенная по закону электромагнитной индукции
- частота наведенной ЭДС
f2=f1s
I 2
I 2
E 2
( R 2 ) 2 ( 2 f 2 L 2 ) 2
- ток I2 в роторной цепи, обладающей
сопротивлением R2 и индуктивностью L2
U1
( R2
s
)2 ( X 2 )2
Схема замещения фазы
асинхронного двигателя
5.
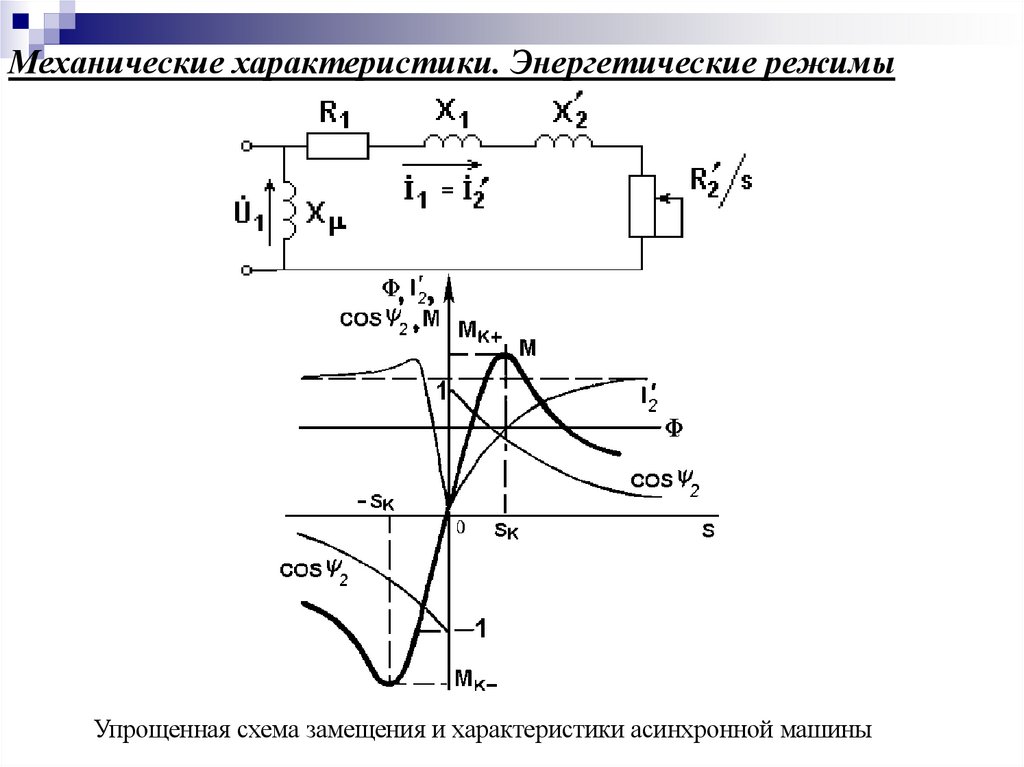
Механические характеристики. Энергетические режимыУпрощенная схема замещения и характеристики асинхронной машины
6.
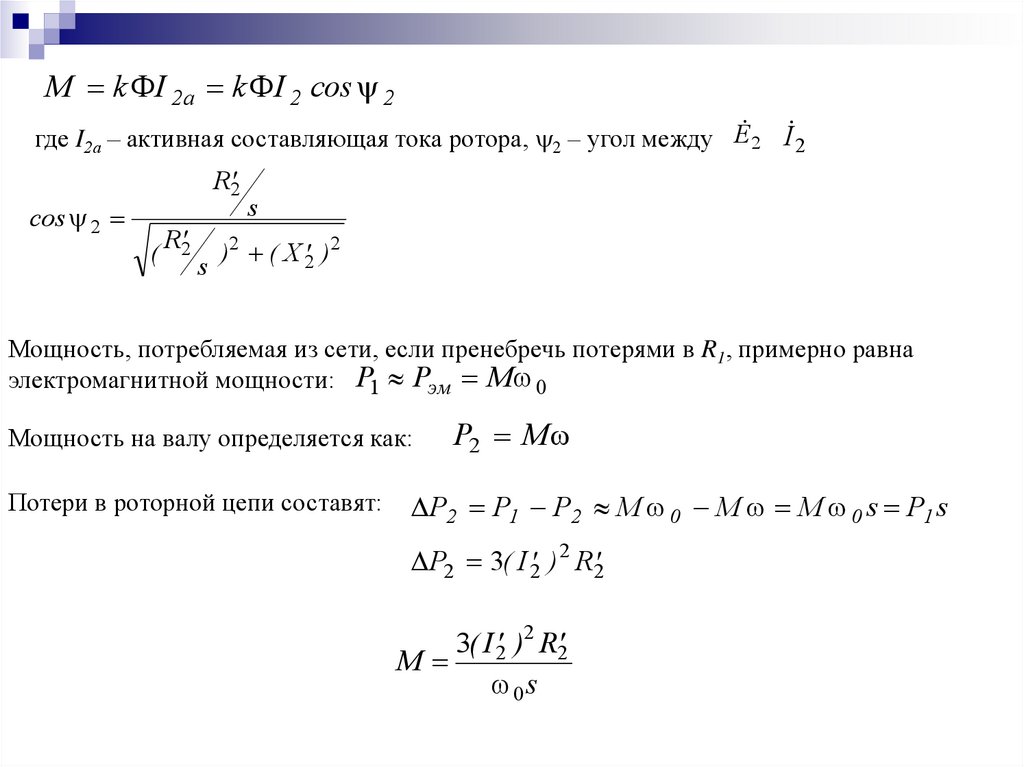
M k I 2a k I 2 cos 2где I2а – активная составляющая тока ротора, 2 – угол между E 2 I 2
cos 2
R2
( R2
s
s
)2 ( X 2 )2
Мощность, потребляемая из сети, если пренебречь потерями в R1, примерно равна
электромагнитной мощности: P1 Pэм M 0
Мощность на валу определяется как:
Потери в роторной цепи составят:
P2 M
P2 P1 P2 M 0 M M 0 s P1 s
P2 3( I 2 )2 R2
3( I 2 )2 R2
M
0s
7.
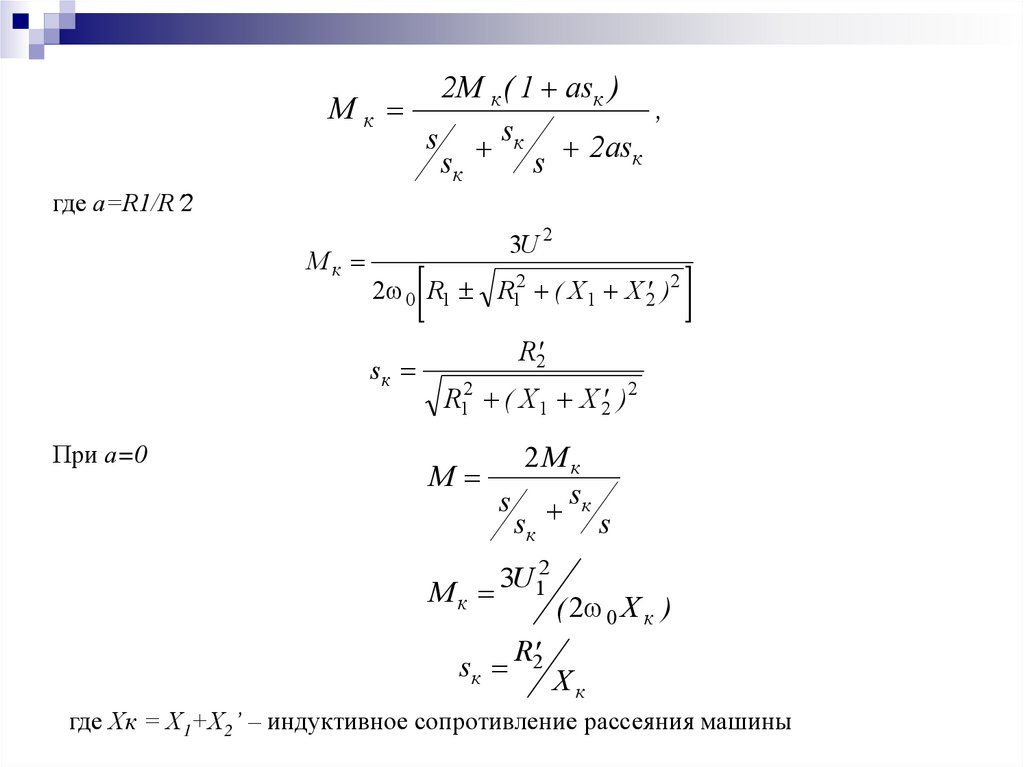
Mкгде а=R1/R 2
Mк
2M к ( 1 asк )
,
s sк 2as
к
sк
s
2 0 R1 R12 ( X 1 X 2 )2
sк
При а=0
3U 2
R2
R12 ( X 1 X 2 )2
M
2 Mк
s sк
sк
s
2
3
U
Mк 1
sк
R2
( 2 0 X к )
Xк
где Хк = Х1+Х2’ – индуктивное сопротивление рассеяния машины
8.
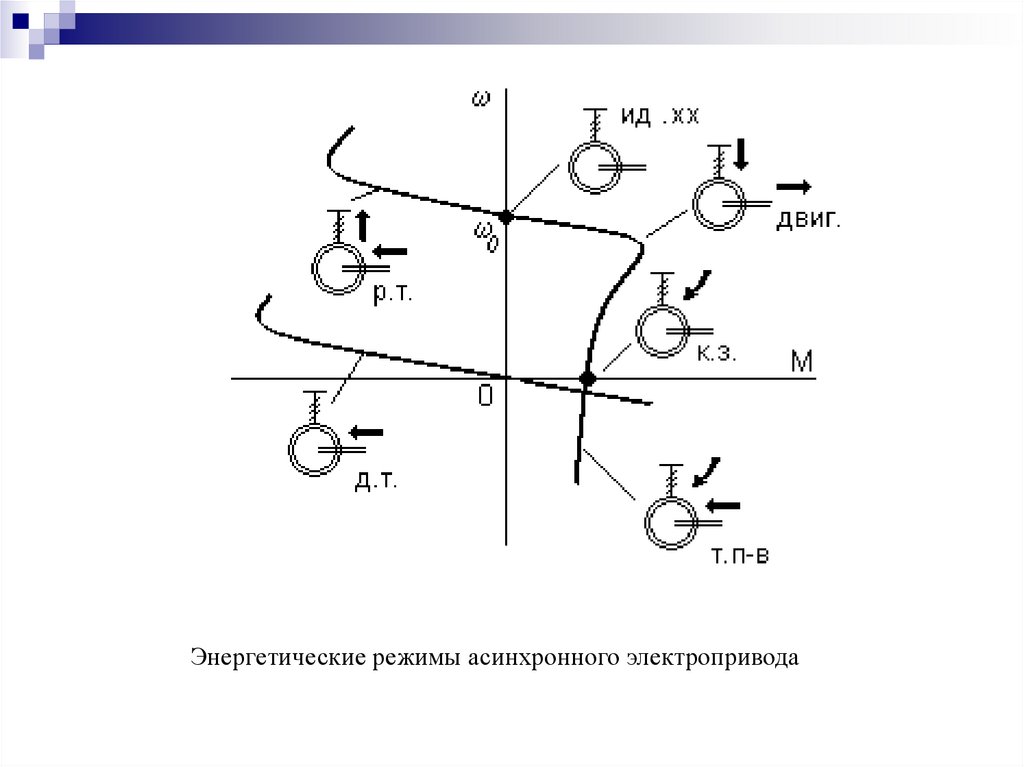
Энергетические режимы асинхронного электропривода9.
Реверс асинхронного двигателяВ режиме динамического торможения
2 M к .т
M
s
sк .т
sк .т
s
M к .т
2
3I экв
X 2
2 0 ( X X 2 )
sк .т
I экв
2
Iп
3
I экв
2
I п - при соединении обмоток статора в треугольник
3
- при соединении обмоток статора в звезду
R2
.
X X 2
10.
Номинальные данныеНа шильдике или в паспорте асинхронного двигателя обычно указаны номинальные
линейные напряжения при соединении обмоток в звезду и треугольник U 1
, токи
I 1
U н
I 1 , частота f, мощность на валу P, частота вращения n, КПД η, cos н
kI
I1п - кратность пускового тока
I1н
kм
Mп
- кратность пускового момента
Mн
Mк
Mн
- кратность критического момента
11.
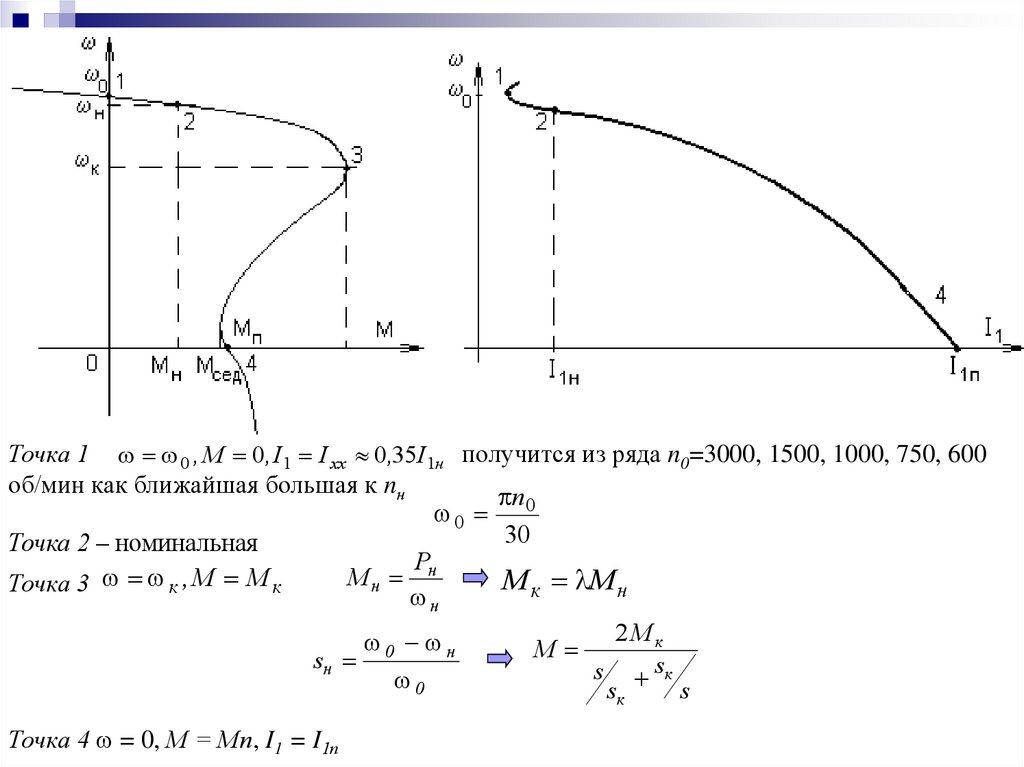
Точка 1 0 , M 0, I1 I хх 0,35I1н получится из ряда n0=3000, 1500, 1000, 750, 600об/мин как ближайшая большая к nн
n
0 0
30
Точка 2 – номинальная
P
Mн н
M к M н
Точка 3 к , M M к
н
2 Mк
0 н
M
sн
s sк
0
sк
s
Точка 4 = 0, М = Мп, I1 = I1п
12.
sн=0,01-0,05 (меньшие значения у двигателей большей мощности – сотни кВт);kI = 5-7;
kМ = 1,3-1,6;
18
, 3,0
Естественные свойства асинхронных двигателей весьма неблагоприятны:
малый пусковой момент;
большой пусковой ток;
ограниченные возможности управления координатами.