
 Программное обеспечение
Программное обеспечениеПохожие презентации:








")

Method for planning the trajectories of mobile objects in conditions of uncertainty
1.
Method for planning the trajectoriesof mobile objects in conditions of
uncertainty
Boitsova Anastasia
406 group
2.
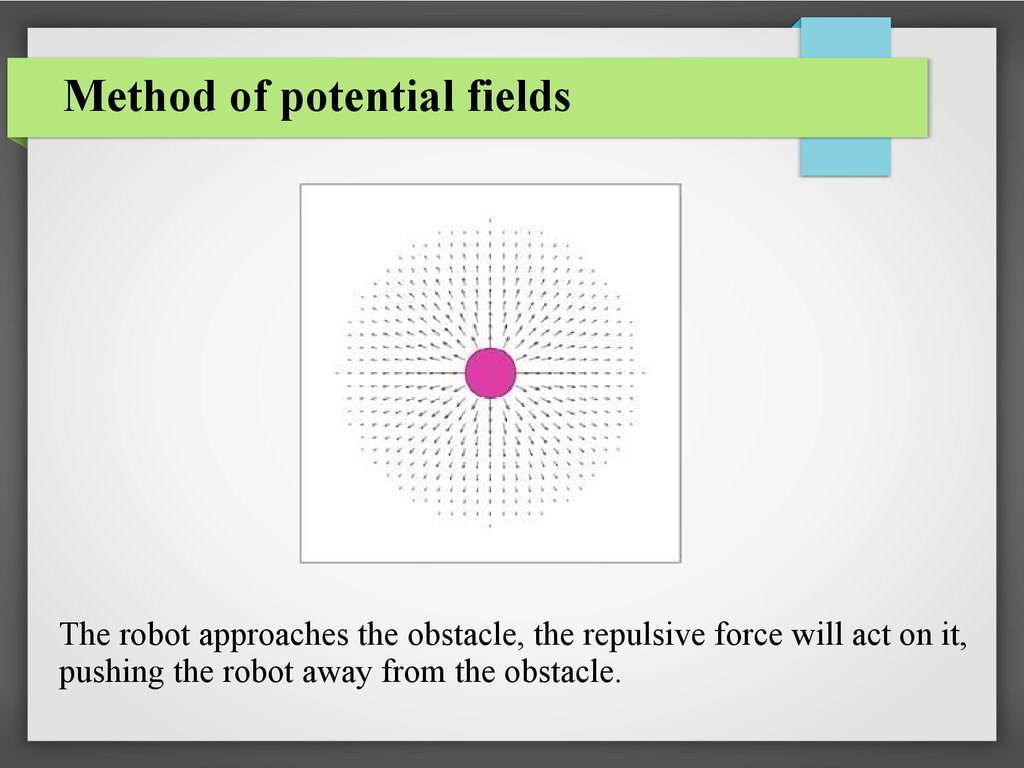
Method of potential fieldsThe robot must move in accordance with this force.
3.
Method of potential fieldsThe robot approaches the obstacle, the repulsive force will act on it,
pushing the robot away from the obstacle.
4.
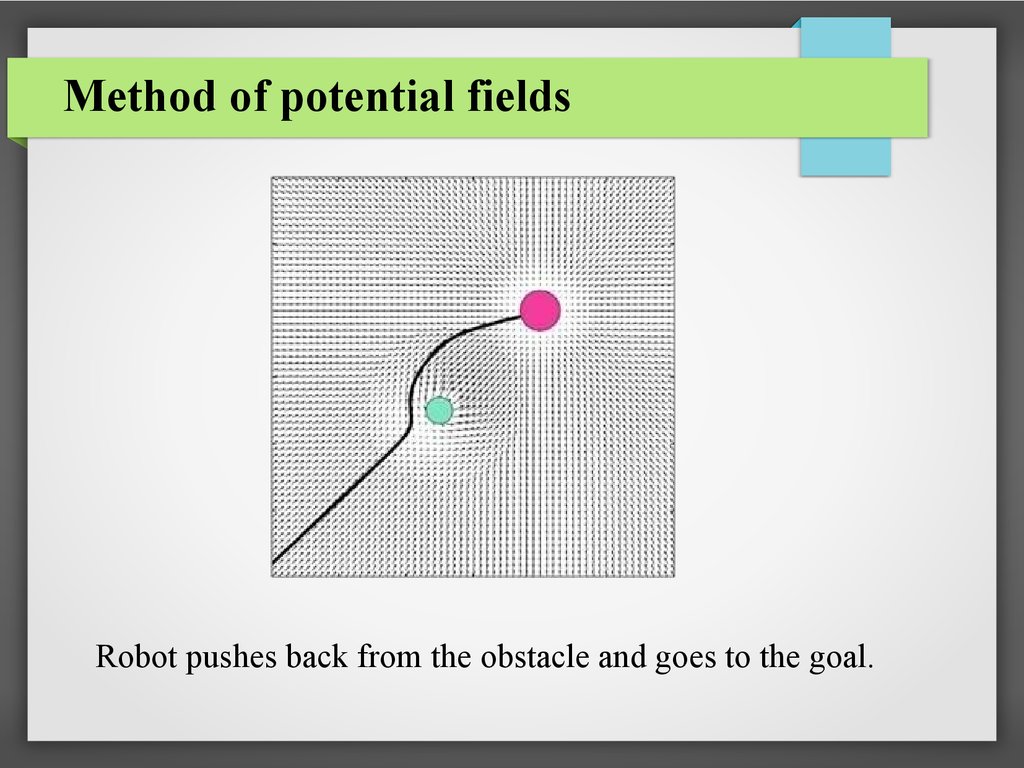
Method of potential fieldsRobot pushes back from the obstacle and goes to the goal.
5.
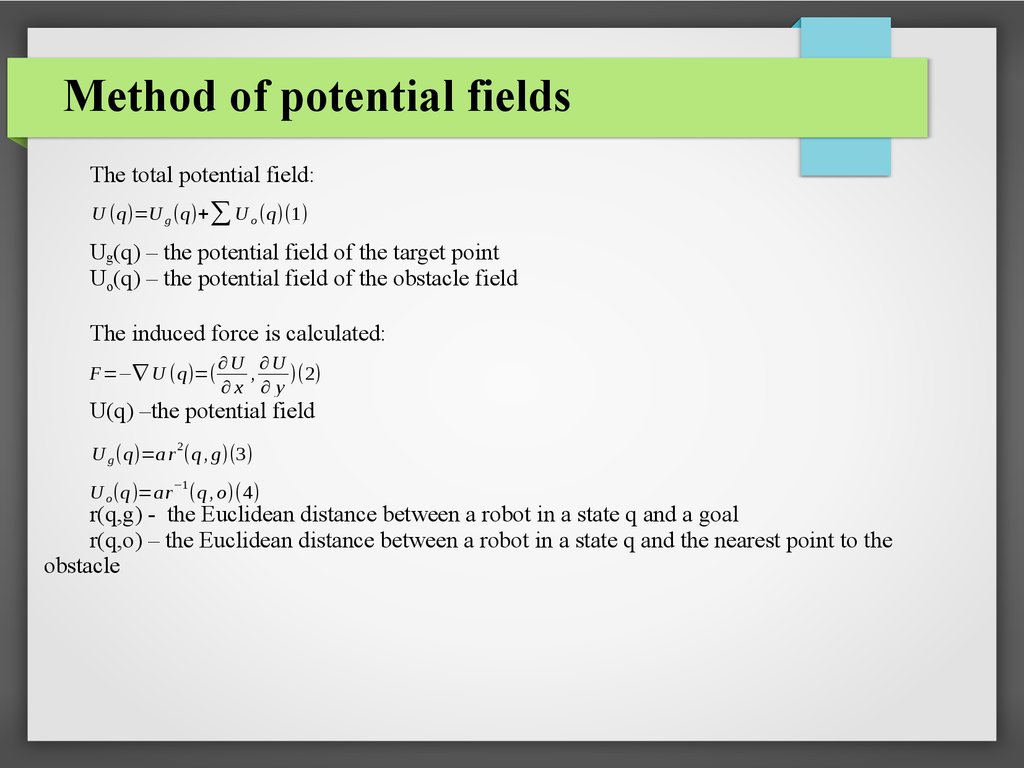
Method of potential fieldsThe total potential field:
U (q)=U g (q)+ ∑ U o (q)(1)
Ug(q) – the potential field of the target point
Uo(q) – the potential field of the obstacle field
The induced force is calculated:
F=−∇ U (q)=(
∂U ∂U
,
)(2)
∂x ∂ y
U(q) –the potential field
U g (q)=a r 2 (q , g)(3)
−1
U o (q)=a r (q , о)(4)
r(q,g) - the Euclidean distance between a robot in a state q and a goal
r(q,o) – the Euclidean distance between a robot in a state q and the nearest point to the
obstacle
6.
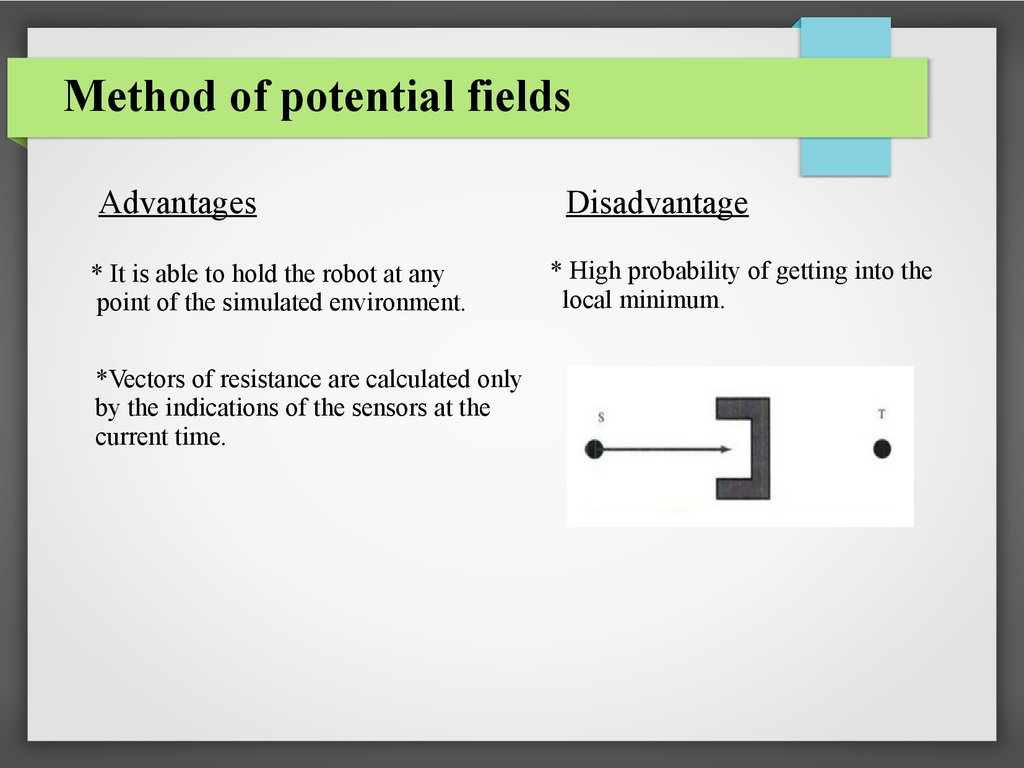
Method of potential fieldsAdvantages
* It is able to hold the robot at any
point of the simulated environment.
*Vectors of resistance are calculated only
by the indications of the sensors at the
current time.
Disadvantage
* High probability of getting into the
local minimum.