











 Медицина
МедицинаПохожие презентации:










Система управління вертольотом
1. Система управління вертольотом
Групового заняття №7 знавчальної дисципліни
«Конструкція та експлуатація
навчального вертольота»
2. Навчальні питання і розподіл часу
• 1. Загальна характеристика органівуправління.
• 2. Повздовжнє, поперечне, шляхове
управління.
• 3. Обєднане управління загальним
кроком несучого гвинта, двигунами та
стабілізатором.
• 4. Автомат перекосу.
3. 1. Загальна характеристика органів управління.
Управління вертольотом призначено для зміни положення
балансування вертольота у польоті щодо трьох просторових
осей за рахунок зміни напряму і величини тяги несучого гвинта і
величини тяги рульового гвинта. До складу управління входять
ручка циклічного кроку несучого гвинта або ручка управління
вертольотом (РУВ), важіль з'єднаного управління “крок – газ”,
важелі роздільного управління паливною автоматикою двигунів,
важелі останову двигунів і важіль гальма несучого гвинта. В
учбовому варіанті вертольота для інструктора додатково
встановлюються РУВ, важіль “крок-газ і педалі.
Керованість характеризується:
ефективністю;
чутливістю;
потужністю;
запізнюванням;
зусиллями на командних важелях.
4. 2. Повздовжнє, поперечне, шляхове управління.
• Подовжнє і поперечне управління здійснюєтьсяоднією ручкою (РУВ), від якої зусилля передаються
по двох незалежних ланцюгах. При нахилі ручки від
середнього положення льотчик через автомат
перекосу змінює нахил рівнодіючої сили тяги
несучого гвинта. Обидва ланцюги мають жорстку
проводку, що складається з гойдалок і тяги від РУВ до
золотників гидроусилителей. Від гидроусилителей
управляюча дія передається жорсткою тягою на
тарілку автомата перекосу. Така схема управління
називається необоротною, оскільки аеродинамічні
сили, зухвалі шарнірні моменти лопатей несучого
гвинта, не передається на РУВ.
5. Ручка управління лівого і правого льотчиків: 1 – отвір для фіксації ручки в нейтральному положенні; 2 – боуден гальма; 3 –
стопор гальма стоянки; 4 – важіль (гашетка)гальма; 5 – кнопка аварійного скидання вантажу із
зовнішньої підвіски; 6 – перемикач управління
триммерами; 7 – кнопка ”РАДІО”; 8 – кнопка “СПУ”; 9 –
гвинт регулювання ходу ручки “на себе”; 10 – гвинт
регулювання ходу ручки “від себе”; 11 – важіль
управління складанням ручки; 12 – стакан фіксатора
ручки в робочому положенні
6.
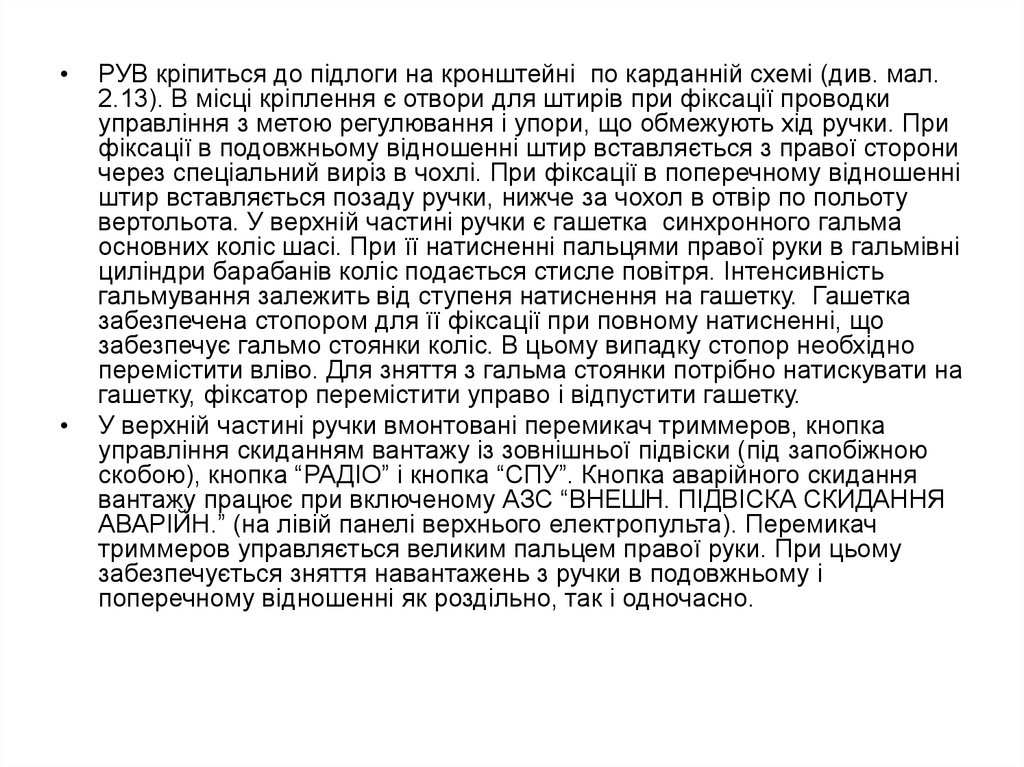
РУВ кріпиться до підлоги на кронштейні по карданній схемі (див. мал.
2.13). В місці кріплення є отвори для штирів при фіксації проводки
управління з метою регулювання і упори, що обмежують хід ручки. При
фіксації в подовжньому відношенні штир вставляється з правої сторони
через спеціальний виріз в чохлі. При фіксації в поперечному відношенні
штир вставляється позаду ручки, нижче за чохол в отвір по польоту
вертольота. У верхній частині ручки є гашетка синхронного гальма
основних коліс шасі. При її натисненні пальцями правої руки в гальмівні
циліндри барабанів коліс подається стисле повітря. Інтенсивність
гальмування залежить від ступеня натиснення на гашетку. Гашетка
забезпечена стопором для її фіксації при повному натисненні, що
забезпечує гальмо стоянки коліс. В цьому випадку стопор необхідно
перемістити вліво. Для зняття з гальма стоянки потрібно натискувати на
гашетку, фіксатор перемістити управо і відпустити гашетку.
У верхній частині ручки вмонтовані перемикач триммеров, кнопка
управління скиданням вантажу із зовнішньої підвіски (під запобіжною
скобою), кнопка “РАДІО” і кнопка “СПУ”. Кнопка аварійного скидання
вантажу працює при включеному АЗС “ВНЕШН. ПІДВІСКА СКИДАННЯ
АВАРІЙН.” (на лівій панелі верхнього електропульта). Перемикач
триммеров управляється великим пальцем правої руки. При цьому
забезпечується зняття навантажень з ручки в подовжньому і
поперечному відношенні як роздільно, так і одночасно.
7.
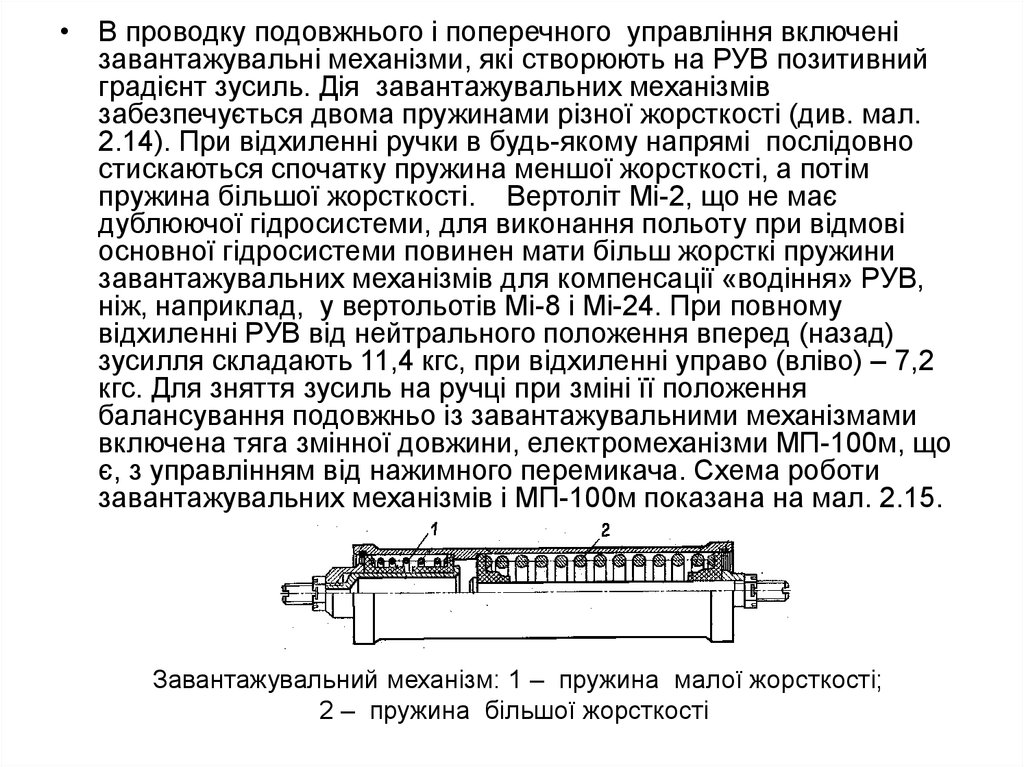
• В проводку подовжнього і поперечного управління включенізавантажувальні механізми, які створюють на РУВ позитивний
градієнт зусиль. Дія завантажувальних механізмів
забезпечується двома пружинами різної жорсткості (див. мал.
2.14). При відхиленні ручки в будь-якому напрямі послідовно
стискаються спочатку пружина меншої жорсткості, а потім
пружина більшої жорсткості. Вертоліт Мі-2, що не має
дублюючої гідросистеми, для виконання польоту при відмові
основної гідросистеми повинен мати більш жорсткі пружини
завантажувальних механізмів для компенсації «водіння» РУВ,
ніж, наприклад, у вертольотів Мі-8 і Мі-24. При повному
відхиленні РУВ від нейтрального положення вперед (назад)
зусилля складають 11,4 кгс, при відхиленні управо (вліво) – 7,2
кгс. Для зняття зусиль на ручці при зміні її положення
балансування подовжньо із завантажувальними механізмами
включена тяга змінної довжини, електромеханізми МП-100м, що
є, з управлінням від нажимного перемикача. Схема роботи
завантажувальних механізмів і МП-100м показана на мал. 2.15.
Завантажувальний механізм: 1 – пружина малої жорсткості;
2 – пружина більшої жорсткості
8.
Схема роботи завантажувальних механізміві механізмів тримерного ефекту:
1 – ручка управління;
2 – тяга управління;
3 – механізм МП-100М;
4 – завантажувальний механізм
• Механізм МП-100м є гвинтовою парою, яка приводиться в
обертання реверсивним електричним двигуном через
планетарний редуктор. Повний хід штока механізму 30 мм за час
близько 10 с.
• Покажчики УПЕС-Д дозволяють льотчику перед виконанням
польотного завдання перевірити правильність центровки
вертольота. Для цього виконується контрольне висение на
висоті 2 – 5 м. Збалансувавши вертоліт, льотчик знімає за
допомогою кнопки триммера зусилля на ручці управління і
контролює положення стрілок на покажчику. Якщо стрілки
відхилюють від нуля більш ніж на 10 одиниць, то завантаження
виконано неправильно і центровка вертольота виходить за межі
обмежень.
9.
Ножне управління (педалі) призначено для путнього управління
вертольота шляхом зміни кроку (а, отже, і тяга) рульового гвинта.
При дачі правої педалі – крок гвинта збільшується, при дачі лівої –
зменшується. Ножне (путнє) управління виконано по оборотній
схемі без гідропідсилювача.
Педалі (мал. 2.16) з параллелограммным механізмом (загальний
хід педалей 174 мм) регулюються перестановкою фіксатора в
одне з трьох положень на важелях педалей по зростанню
льотчика в межах до 106 мм Для регулювання необхідно підвести
стопорну пластину і відвести її убік від фіксатора. Далі, за дротяне
кільце вийняти фіксатор і встановити педаль в потрібне
положення, після чого вставити фіксатор і застопорити його
пластиною. Граничні положення обмежуються регулювальними
болтами, встановленими в кронштейні.
Фіксація педалей в нейтральному положенні при регулювальних
роботах проводиться штирем через вертикальний отвір.
Опорні майданчики педалей мають кронштейни, в яких кріпляться
запобіжні ремені для взуття льотчика. На опорний майданчик
педалі нога повинна ставати середньою частиною ступні.
Оборотна схема ножного управління виявляється в тому, що
зусилля від шарнірних моментів лопатей рульового гвинта
доводиться долати льотчику. Як вже згадувалося, мінімальні
зусилля відповідають кроку гвинта 5 . Ці зусилля частково знімає
встановлений в проводці пружинний компенсатор (див. мал. 2.16).
10.
Педалі путнього управління і схема роботи
пружинного компенсатора: 1 – важелі і тяга
параллелограммного механізму; 2 – притискна
пластина штиря фіксації механізму регулювання
педалей; 3 – важіль педалі; 4 – педаль; 5 – ножний
ремінь; 6 – тяга передачі зусиль від педалей; 7 –
гвинти регулювання ходу педалей; 8 – отвори для
регулювання педалей по зростанню льотчика; 9 –
пружинний компенсатор
11. 3. Обєднане управління загальним кроком несучого гвинта, двигунами та стабілізатором.
• Об’єднане керування кроком несучого гвинта, стабілізатором ідвигунами здійснюється важелем "крок-газ" (рис. 12), що
кінематичне через гідропідсилювач зв’язаний з повзуном
автомата перекосу й одночасно з важелями паливних насосіврегуляторів НР-40Т двигунів. Таким чином, важель "крок-газ" (8)
призначений для керування тягою несучого гвинта.
Об’єднане керування "крок-газ", важелі роздільного керування двигунами і
покажчик кроку несучого гвинта:
1 важелі роздільного керування двигунами; 2 кнопка фіксатора; 3 гашетка фіксатора;
4 кнопка скидання вантажу з зовнішньої підвіски;
5 натискний перемикач керування фарою; 6 – поворотна рукоятка корекції;
7 гайка регулювання фрикціону; 8 важіль "крок-газ"
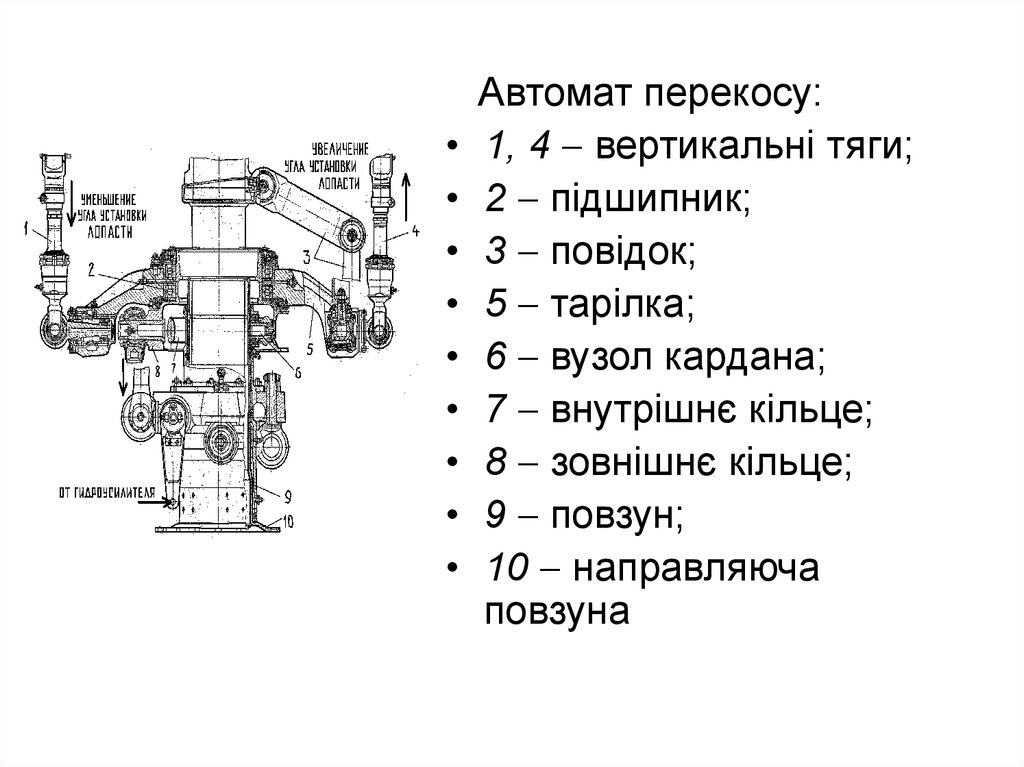
12. 4. Автомат перекосу.
• Автомат перекосу це механізм керування загальним і циклічнимкроком НГ, що забезпечує зміну величини і напрямку повної
аеродинамічної сили НГ.
• Автомат перекосу встановлений на верхній кришці головного
редуктора і передає рух з не обертаючих елементів системи
керування на обертаючі лопаті (рис. 13). Вал несучого гвинта
проходить усередині направляючої повзуна (10) загального
кроку, жорстко закріпленого на фланці головного редуктора. До
повзуна (9) шарнірно закріплені внутрішнє (7) і зовнішнє (8)
кільця, які не обертаються, а також качалки подовжнього і
поперечного керування. Осі відхилення кілець взаємно
перпендикулярні, що дозволяє їм качатися у двох площинах.
• На зовнішньому кільці через підшипник змонтована тарілка
автомата перекосу, яка обертається від втулки несучого гвинта
за допомогою дволанкового повідця. Тарілка у свою чергу через
вертикальні тяги з’єднана з важелями повороту лопатей в
осьових шарнірах.
13.
Автомат перекосу:
1, 4 вертикальні тяги;
2 підшипник;
3 повідок;
5 тарілка;
6 вузол кардана;
7 внутрішнє кільце;
8 зовнішнє кільце;
9 повзун;
10 направляюча
повзуна
14. Схема забезпечення випередження керування в автоматі перекосу: 1 – кріплення тяги поперечного керування від гідропідсилювача; 2
– внутрішнє кільце; 3 наружнее кільце; 4 вузол кардана міжповзуном і внутрішнім кільцем; 5 вузол кардана між внутрішнім і
наружним кільцем; 6 – кріплення тяги подовжнього керування від РП-35
15. Схема механізму компенсації взаємного впливу каналу загального кроку і поздовжньо-поперечного керування: 1 гідропідсилювач; 2
Схема механізму компенсації взаємного впливу каналу загального кроку іпоздовжньо-поперечного керування:
1 гідропідсилювач; 2 двоплечна качалка подовжнього (поперечного)
керування; 3 компенсаційна тяга; 4 тарілка автомата перекосу; 5 –
вертикальна тяга повороту лопаті; 6 зовнішнє кільце кардана; 7
сполучна тяга; 8 качалка; 9 повзун; 10 направляюча повзуна; 11
горизонтальна тяга; 12 важіль двоплечної качалки