










 Физика
ФизикаПохожие презентации:

")
")

Elektriska piedzina. (№2)
1.
LĪDZSTRĀVAS NEATKARĪGĀS IEROSMESDZINĒJU MEHĀNISKĀS RAKSTURLĪKNES,
PARAMETRU IZMAIŅAS IETEKME UN
APRĒĶINS
GRIEŠANĀS FREKVENCES REGULĒŠANA
2.
+-
U
E
Rp
Ia
M
M
R
UIE
+
-
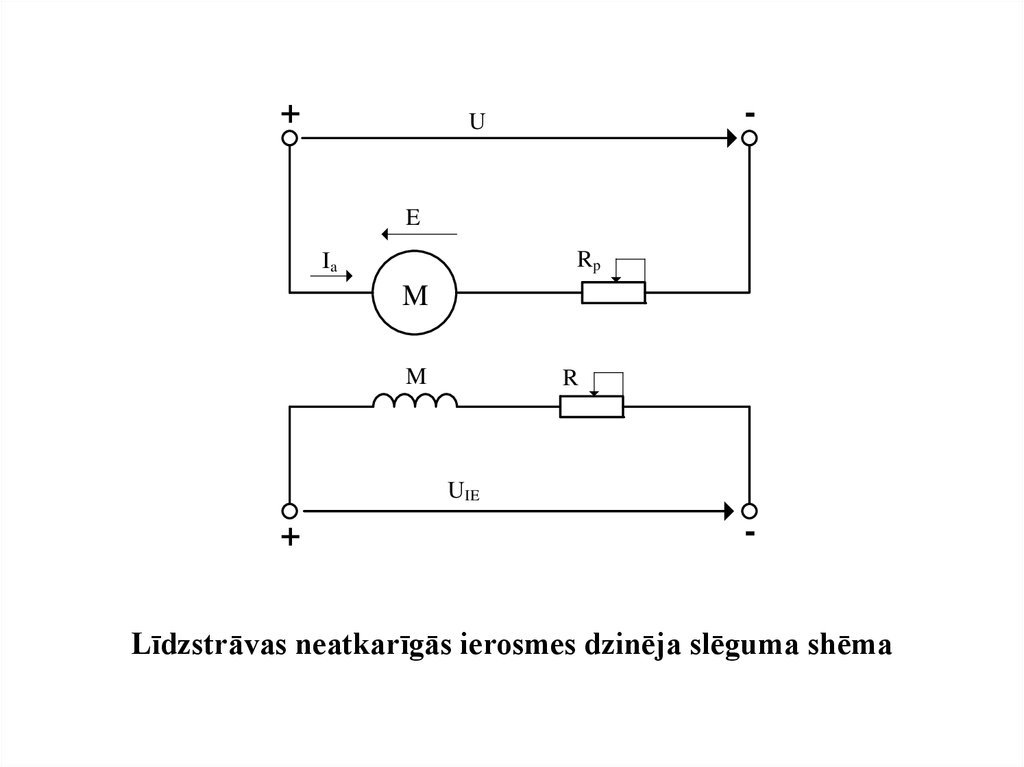
Līdzstrāvas neatkarīgās ierosmes dzinēja slēguma shēma
3.
Dzinēja enkura ķēdes spriegumu līdzsvara vienādojums:U I a R E,
kur
U - spriegums uz dzinēja spailēm, V;
E - enkurā inducētais EDS, V;
Ia - enkura ķēdes atrāva, A;
R = Ra + Rp - enkura ķēdes kopējā pretestība, Ω.
4.
Līdzstrāvas mašīnā inducētais EDS ir tiešiproporcionāls griešanās frekvencei:
E cEФn,
kur
n - dzinēja griešanās frekvence, apgr/min;
Φ - viena pola galvenā plūsma , Vb;
pN
- dzinēja EDS konstante, ko nosaka dzinēja
cE
60a
nemainīgie parametri:
p - polu pāru skaits, N - enkura vadu skaits,
a - paralēlo zaru pāru skaits.
5.
Līdzstrāvas dzinēja elektromehānisko raksturlīkne:Ia R
U
n
.
cEФ cEФ
Līdzstrāvas mašīnas elektromagnētiskais moments
M cM ФI a ,
kur
cM = pN/2πa - dzinēja momenta konstante.
6.
Līdzstrāvas mašīnu konstruktīvo parametrukonstantes apvieno šāda sakarība:
cM 9,55cE
7.
Līdzstrāvas mašīnas mehāniskā raksturlīkne:U
MR
n
2
cEФ cE cM Ф
8.
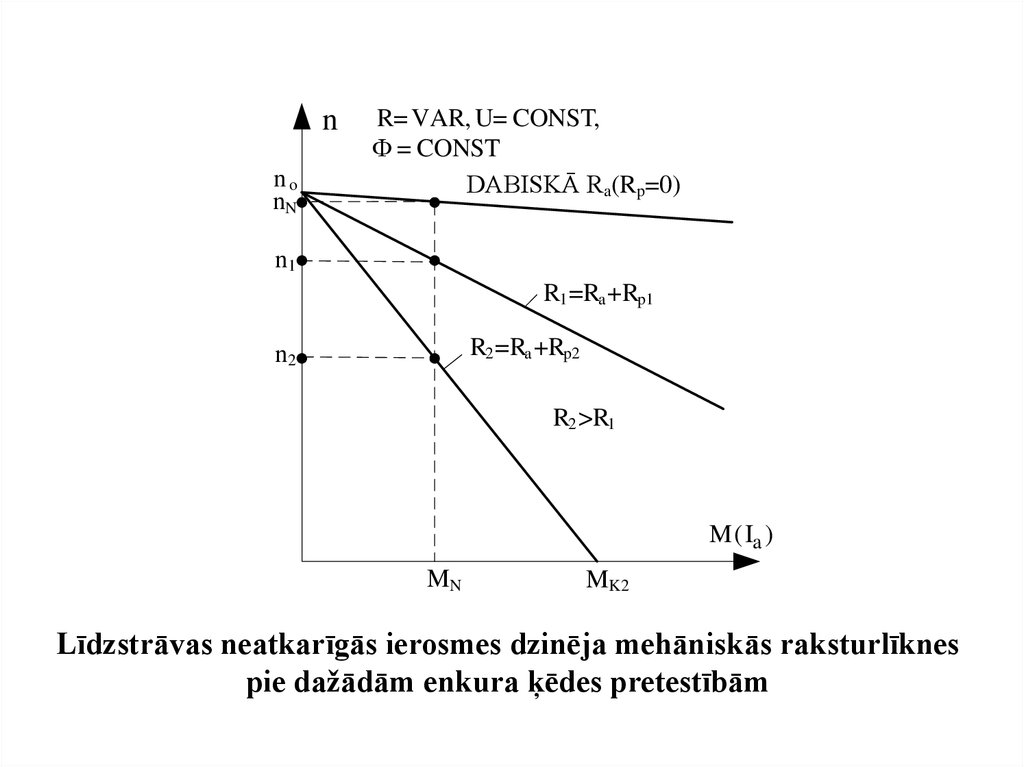
nno
nN
R= VAR, U= CONST,
Ф = CONST
DABISKĀ Ra(Rp=0)
n1
R1 =Ra +Rp1
R2 =Ra +Rp2
n2
R2 >R1
M(Ia )
MN
MK2
Līdzstrāvas neatkarīgās ierosmes dzinēja mehāniskās raksturlīknes
pie dažādām enkura ķēdes pretestībām
9.
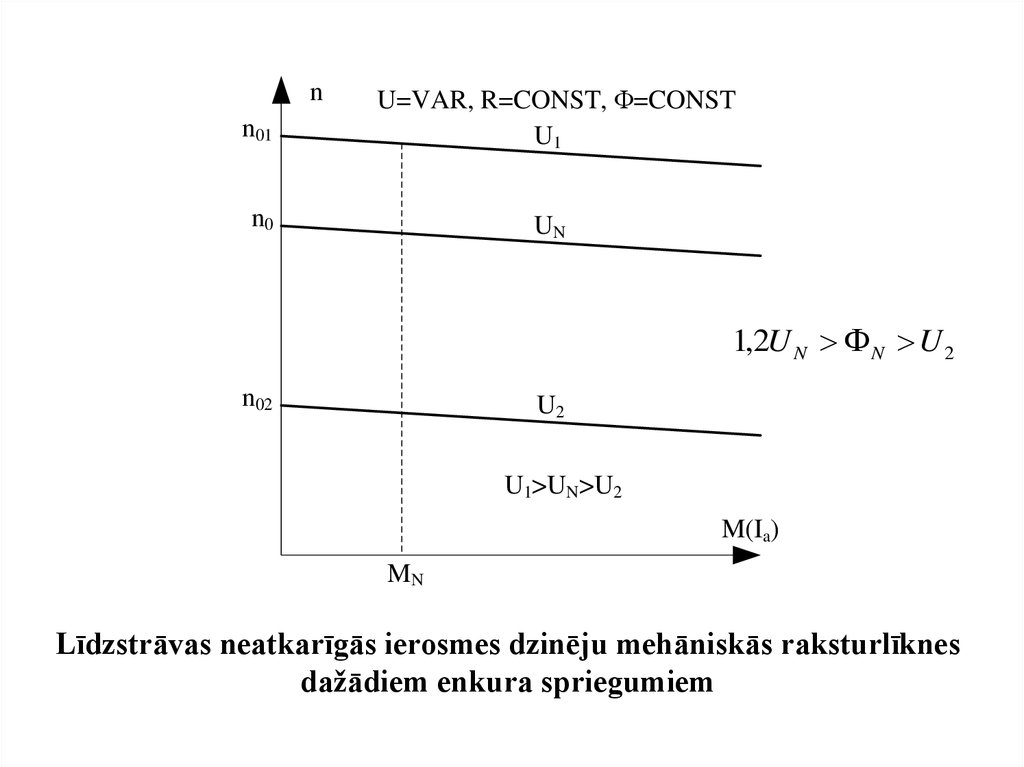
nn01
U=VAR, R=CONST, Φ=CONST
U1
n0
UN
1,2U N N U 2
n02
U2
U1>UN>U2
M(Ia)
MN
Līdzstrāvas neatkarīgās ierosmes dzinēju mehāniskās raksturlīknes
dažādiem enkura spriegumiem
10.
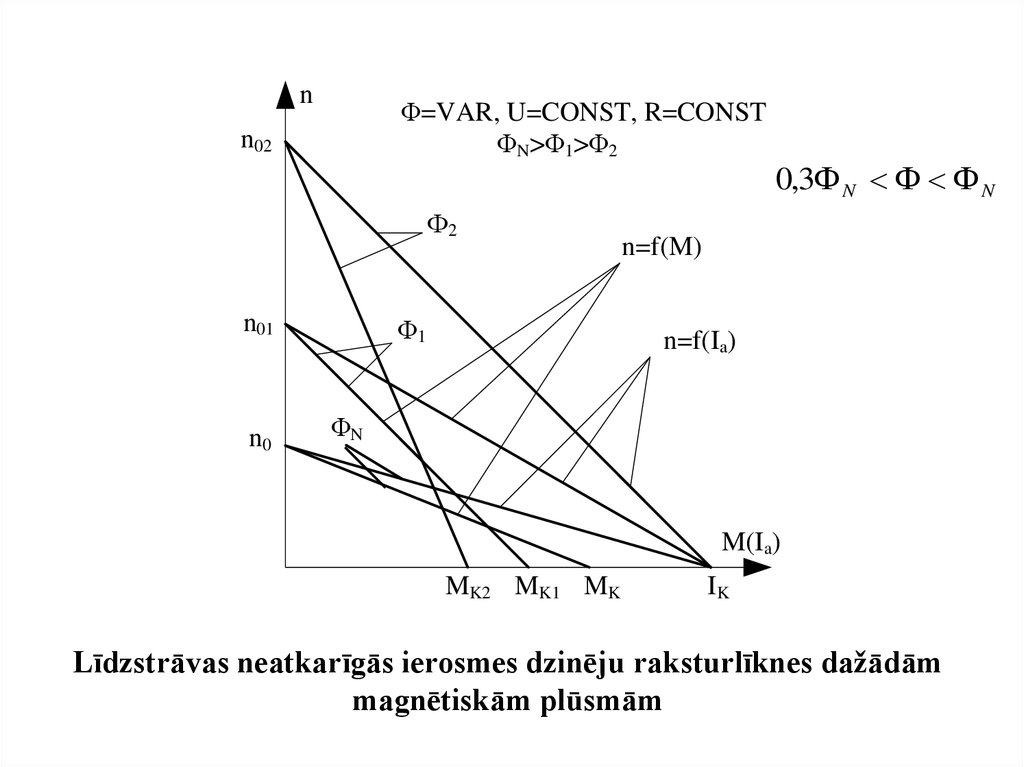
nΦ=VAR, U=CONST, R=CONST
ΦN>Φ1>Φ2
n02
Ф2
n01
n0
Φ1
0,3 N N
n=f(M)
n=f(Ia)
ΦN
M(Ia)
MK2 MK1 MK
IK
Līdzstrāvas neatkarīgās ierosmes dzinēju raksturlīknes dažādām
magnētiskām plūsmām
11.
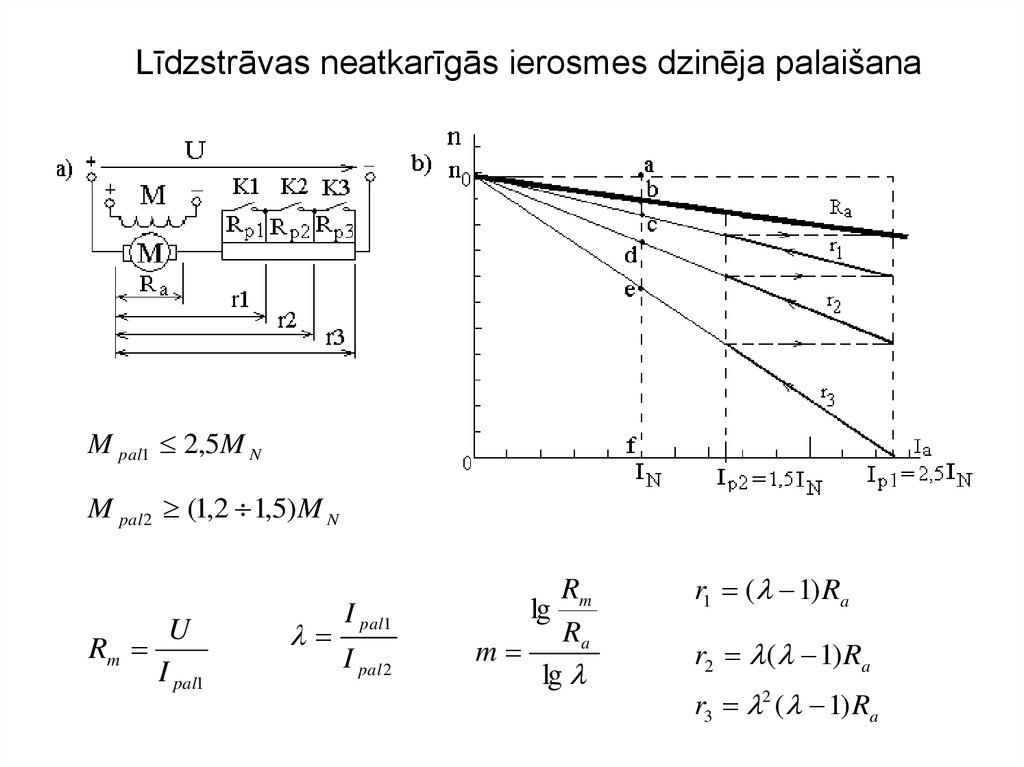
Līdzstrāvas neatkarīgās ierosmes dzinēja palaišanaM pal1 2,5M N
M pal 2 (1,2 1,5) M N
U
Rm
I pal1
I pal1
I pal 2
Rm
Ra
m
lg
lg
r1 ( 1) Ra
r2 ( 1) Ra
r3 2 ( 1) Ra
12.
Līdzstrāvas neatkarīgās ierosmes dzinējubremzēšanas režīmi
Līdzstrāvas neatkarīgās ierosmes dzinējiem ir trīs
galvenie bremzēšanas paņēmieni:
1) rekuperatīvā bremzēšana;
2) dinamiskā bremzēšana;
3) pretslēguma (pretstrāvas) bremzēšana.
13.
a)b)
n
II
I
Rekuperatīvā
bremzēšana
no
Dinamiskā
bremzēšana
R1
Dabiskā
Ra
1
R1
Dzinēja
režīms
M
Ra
R1=Ra+Rp
2
III
Dinamiskā
bremzēšana
Pretslēguma
bremzēšana
IV
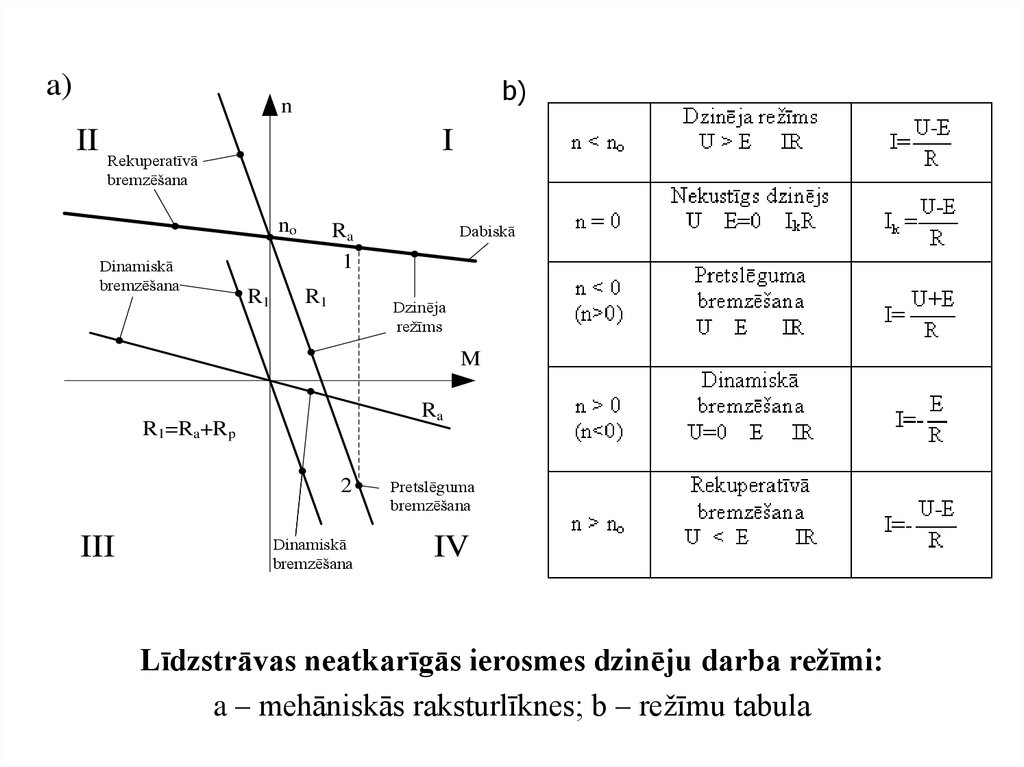
Līdzstrāvas neatkarīgās ierosmes dzinēju darba režīmi:
a – mehāniskās raksturlīknes; b – režīmu tabula
14.
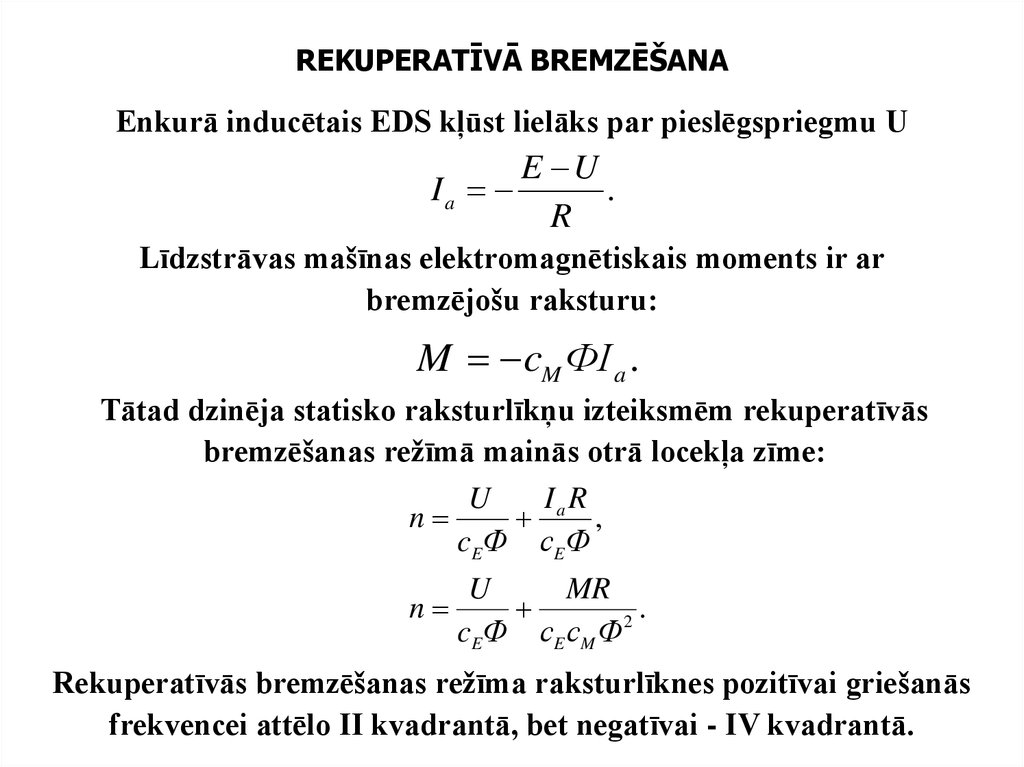
REKUPERATĪVĀ BREMZĒŠANAEnkurā inducētais EDS kļūst lielāks par pieslēgspriegmu U
E U
Ia
.
R
Līdzstrāvas mašīnas elektromagnētiskais moments ir ar
bremzējošu raksturu:
M cM ФI a .
Tātad dzinēja statisko raksturlīkņu izteiksmēm rekuperatīvās
bremzēšanas režīmā mainās otrā locekļa zīme:
I R
U
n
a ,
cE Ф cE Ф
n
U
MR
.
2
cEФ cE cM Ф
Rekuperatīvās bremzēšanas režīma raksturlīknes pozitīvai griešanās
frekvencei attēlo II kvadrantā, bet negatīvai - IV kvadrantā.
15.
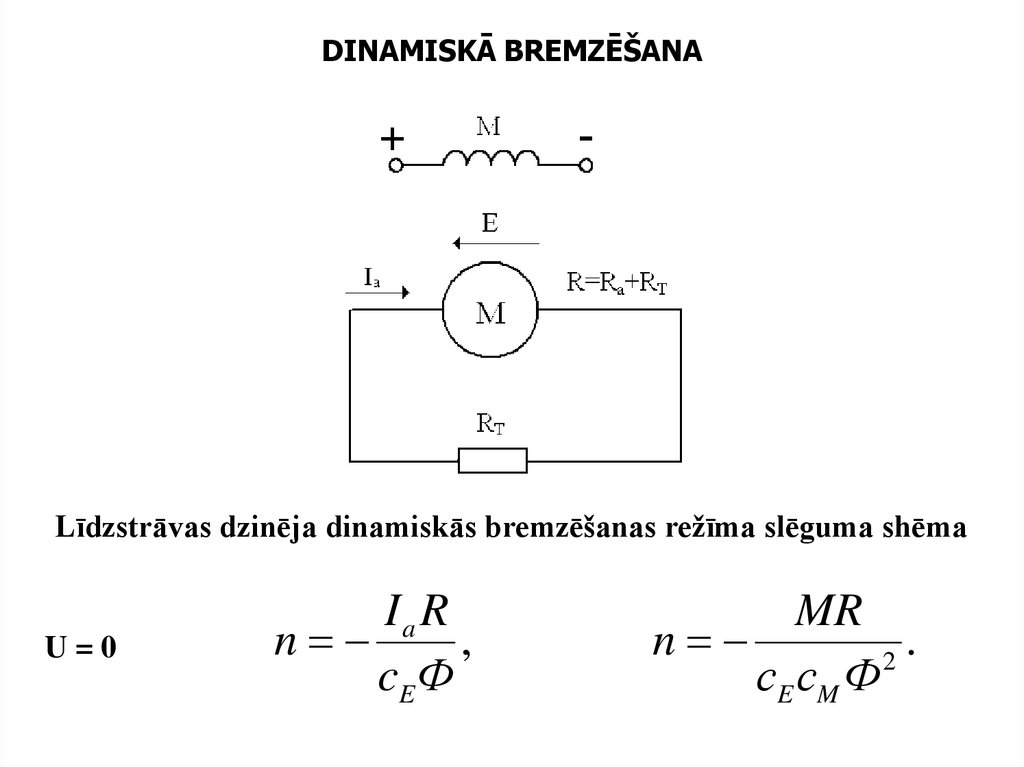
DINAMISKĀ BREMZĒŠANALīdzstrāvas dzinēja dinamiskās bremzēšanas režīma slēguma shēma
U=0
Ia R
n
,
cE Ф
MR
n
.
2
cE cM Ф
16.
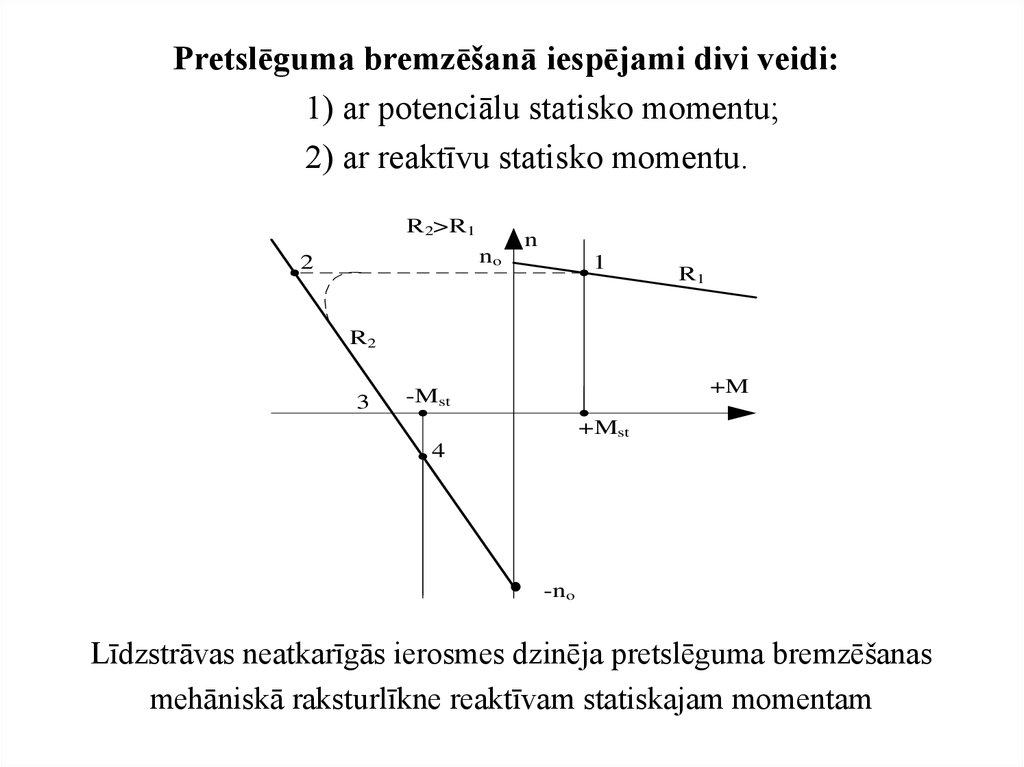
Pretslēguma bremzēšanā iespējami divi veidi:1) ar potenciālu statisko momentu;
2) ar reaktīvu statisko momentu.
R2>R1
n
no
2
1
R1
R2
3
+M
-Mst
+Mst
4
.
-no
Līdzstrāvas neatkarīgās ierosmes dzinēja pretslēguma bremzēšanas
mehāniskā raksturlīkne reaktīvam statiskajam momentam
17.
Līdzstrāvas virknes ierosmes dzinējumehāniskās raksturlīknes, parametru
izmaiņas ietekme un aprēķins
18.
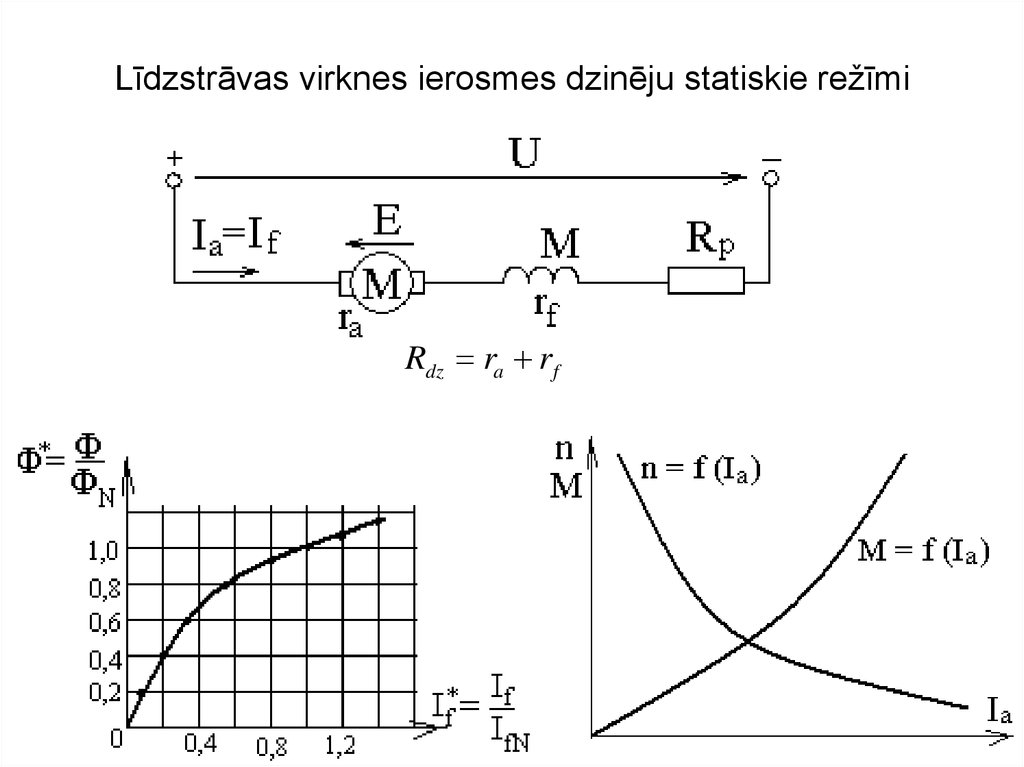
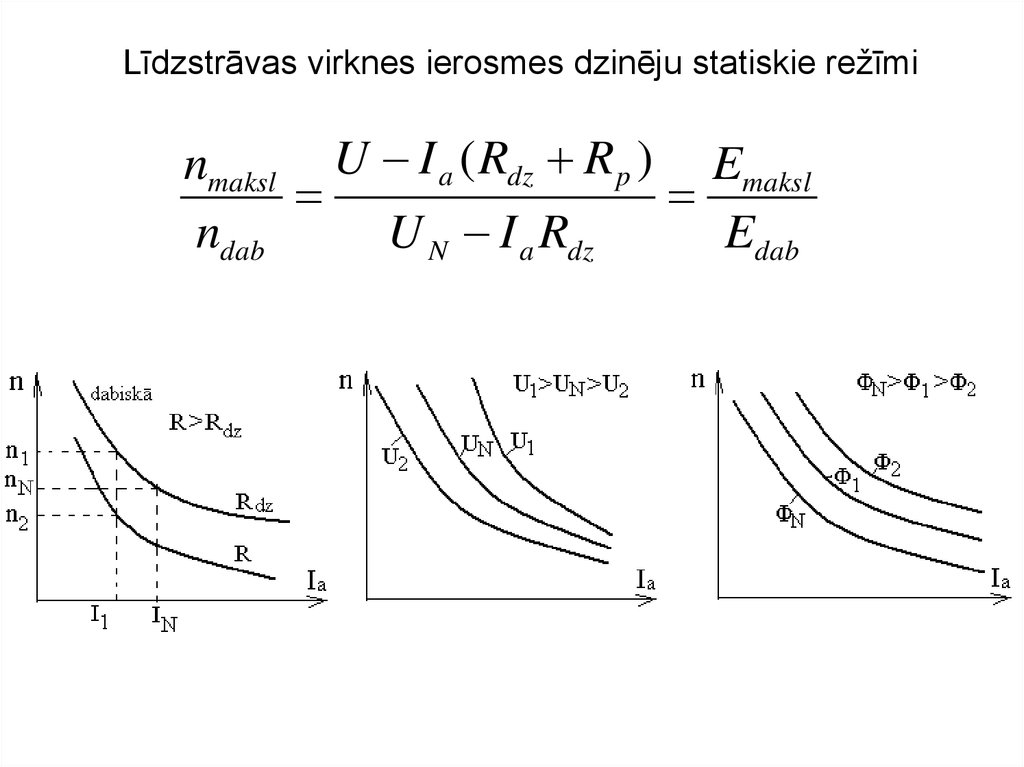
Līdzstrāvas virknes ierosmes dzinēju statiskie režīmiRdz ra rf
19.
Ia RU
n
cEФ cEФ
Ja pieņem, ka dzinējs darbojas nepiesātinājuma zonā un Ia≡Ф tad
Ф Ia
Virknes ierosmes dzinēja elektromehāniskā raksturlīkne:
n
U
cE I a
R
cE
Virknes ierosmes dzinēja mehāniskā raksturlīkne:
U
n
cE
M
cM
R
cE
20.
Līdzstrāvas virknes ierosmes dzinēju statiskie režīminmaksl U I a ( Rdz R p ) Emaksl
ndab
U N I a Rdz
Edab
21.
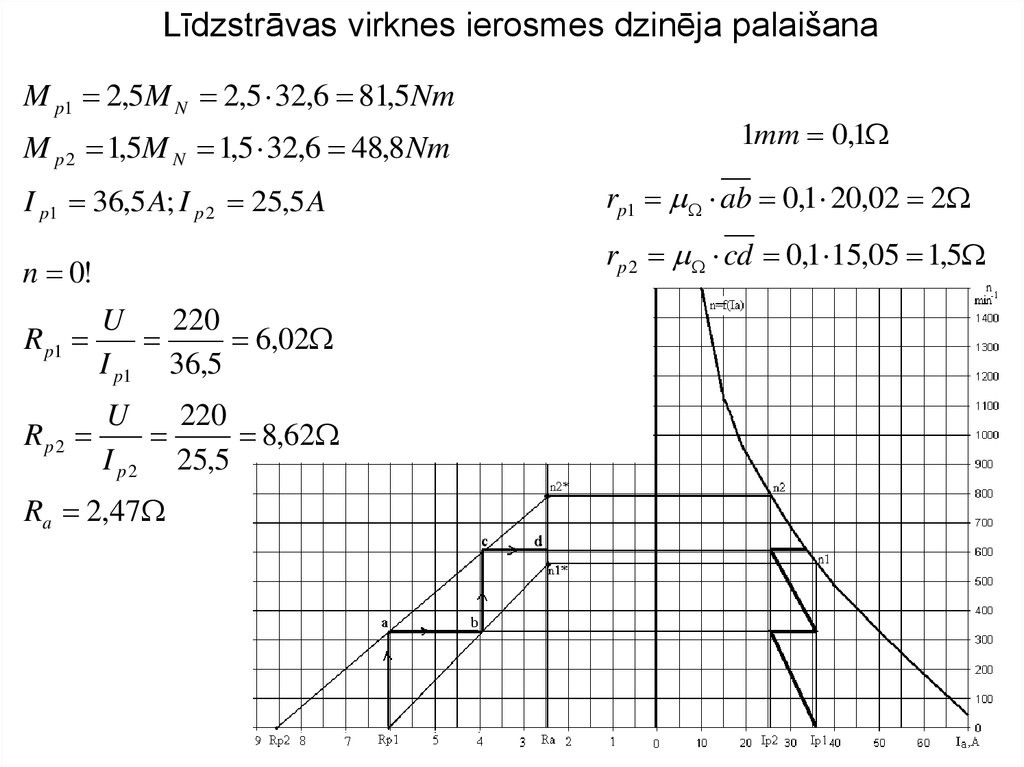
Līdzstrāvas virknes ierosmes dzinēja palaišanaM p1 2,5M N 2,5 32,6 81,5 Nm
M p 2 1,5M N 1,5 32,6 48,8 Nm
1mm 0,1
I p1 36,5 A; I p 2 25,5 A
rp1 ab 0,1 20,02 2
n 0!
rp 2 cd 0,1 15,05 1,5
R p1
Rp2
U
220
6,02
I p1 36,5
U
220
8,62
I p 2 25,5
Ra 2,47
22.
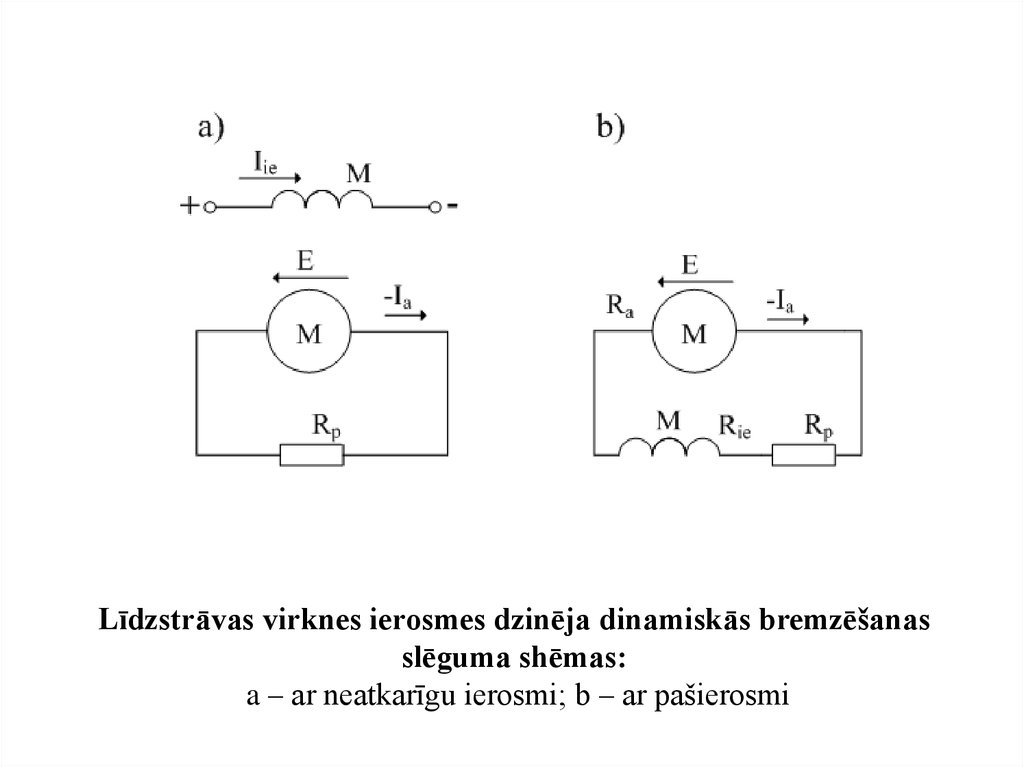
Līdzstrāvas virknes ierosmes dzinēja dinamiskās bremzēšanasslēguma shēmas:
a – ar neatkarīgu ierosmi; b – ar pašierosmi
23.
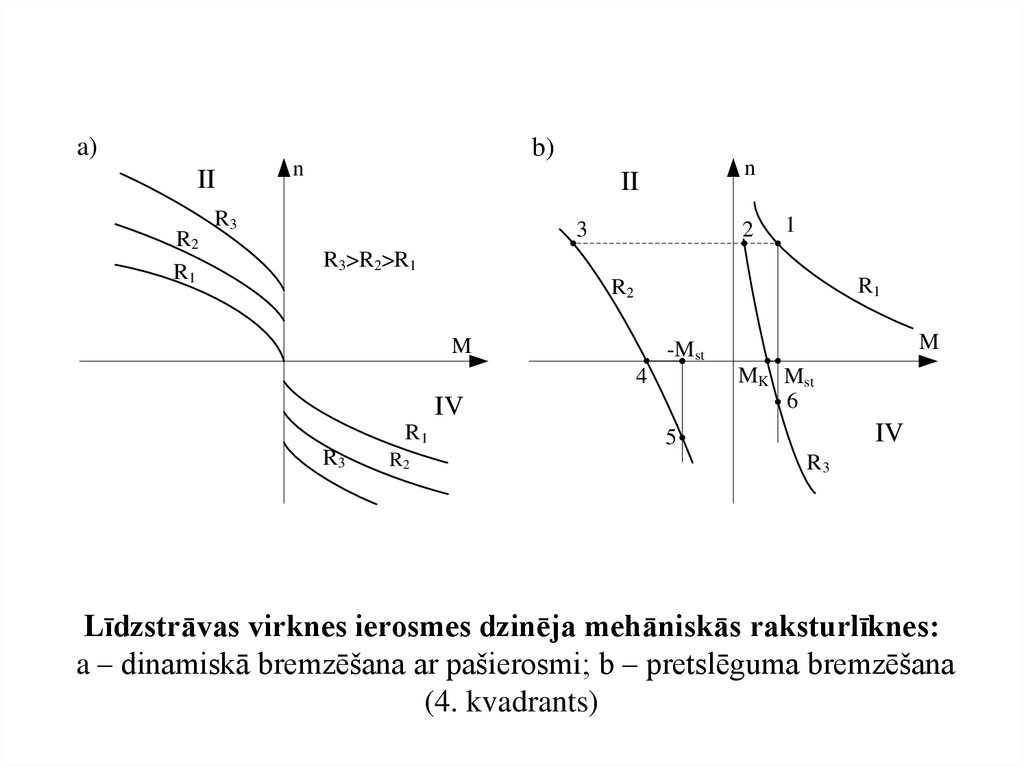
a)II
R2
R1
b)
n
n
II
R3
3
2
1
R3>R2>R1
R1
R2
M
MK Mst
6
4
IV
R1
R3
R2
M
-Mst
IV
5
R3
Līdzstrāvas virknes ierosmes dzinēja mehāniskās raksturlīknes:
a – dinamiskā bremzēšana ar pašierosmi; b – pretslēguma bremzēšana
(4. kvadrants)
24.
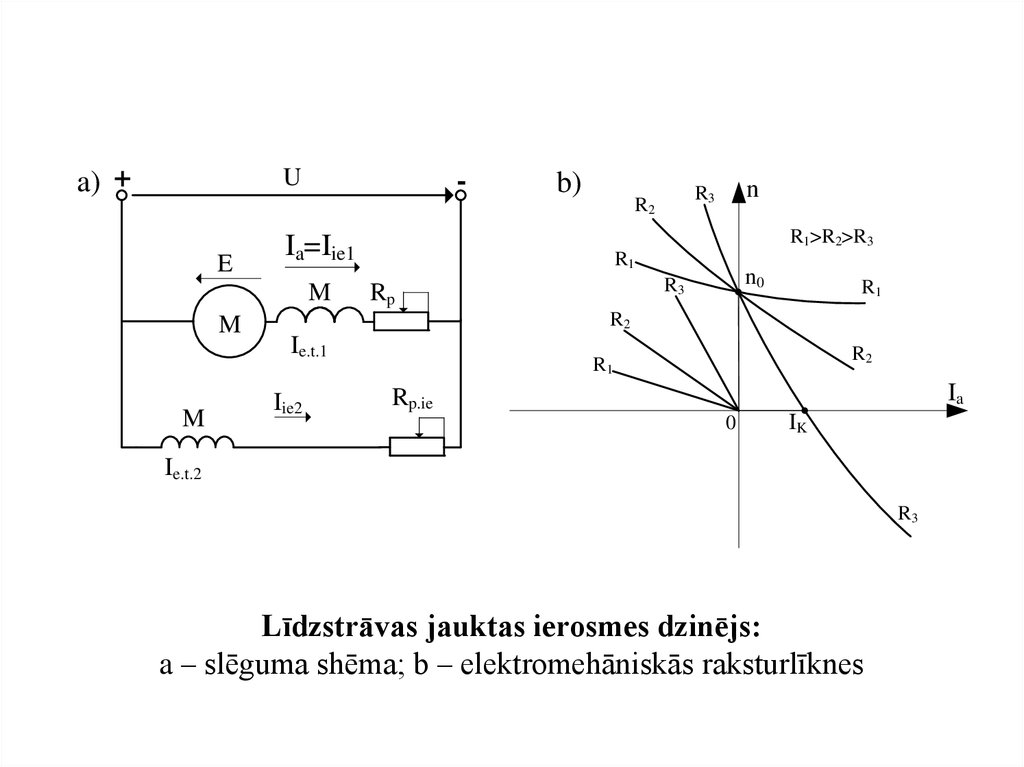
a) +U
E
-
M
n
R3
R2
R1>R2>R3
Ia=Iie1
M
M
b)
R1
n0
R3
Rp
R1
R2
Ie.t.1
Iie2
R2
R1
Ia
Rp.ie
0
IK
Ie.t.2
R3
Līdzstrāvas jauktas ierosmes dzinējs:
a – slēguma shēma; b – elektromehāniskās raksturlīknes
25. LDn griešanās frekvences regulēšana ar papildpretestību enkura ķēdē
Priekšrocības:1. Vienkārša slēguma shēma
2. Iespējams ierobežot palaišanas
strāvu
3. Iespējama regulēšana pie
konstanta pretestības momenta
P1 UI a EI a I a2 R EI a P
n0 n
P P1
P1
n0
Trūkumi:
1. Lieli jaudas zudumi
2. Griešanas frekvenci var tikai
samazināt zem nominālās
3. Pasliktinās piedziņas darbības
stabilitāte, jo raksturlīkņu cietība
samazinās
4. Iespējama pakāpjveida regulēšana
5. Regulēšanas diapazons atkarīgs no
slodzes
26. LDn griešanās frekvences regulēšana ar plūsmas maiņu
a)+
-
U
Rpie
M
b)
n
c)
n
n02
Φ2
n02
n01 Φ
1
Mst
n01 Φ1
n0 ΦN
M
U=CONST
Φ=VAR
R=CONST
ΦN >Φ1 >Φ2
n0 ΦN
I
IN
IK
MK1
Φ2
MK2
Priekšrocības:
1. Vienkārša slēguma shēma
2. Mazi jaudas zudumi
3. Ērta vadība
Trūkumi:
1. Neliels regulēšanas diapazons
2. Griešanas frekvenci var tikai palielināt virs nominālās
3. Pie augstākām griešanās frekvencēm samazinās dzinēja attīstītais moments
4. Samazinās mehānisko raksturlīkņu cietība
M
MK
27. LDn griešanās frekvences regulēšana ar sprieguma maiņu
a)-
+
SPRIEGUMA
REGULATORS
U
+
M
M
+
U=VAR
Φ=CONST
R=CONST
-
U3>UN>U2>U1
b) n
n03
U3
n0
UN
n02
U2
n01
U1
-
Priekšrocības:
1. Nemainās raksturlīkņu cietība
2. Iespējama divzonu regulēšana
3. Iespējama regulēšana pie konstanta pretestības momenta
4. Plūstoša regulēšana
5. Mazi jaudas zudumi dzinējā
6. Liels regulēšanas diapazons
Trūkumi:
1. Sarežģītas spriegumu regulatoru shēmas
2. Spriegumu regulatoru izmaksas pārsniedz dzinēja vērtību
3. Griešanas frekvences palielināšana iespējama tikai par 20%
M
Mst
28. LDn griešanās frekvences regulēšana sistēmā “ģenerators-dzinējs”
nEģ
cE dz
n
Eģ
cE dz
I a ( Raģ Radz )
cE dz
M ( Raģ Radz )
Priekšrocības:
1. Mazi pārejas procesu enerģijas zudumi
2. Ērta regulēšana
3. Vienmērīga griešanas frekvences maiņa
4. Iespējama rekuperatīvā bremzēšana
Trūkumi:
1. Lieli kapitālie un ekspluatācijas izdevumi, palīgiekārtas uzstādītā jauda
2. Mazs kopējais lietderības koeficients
3. G-D sistēmas jauda ir ierobežota
4. Divkārtēja enerģijas pārveidošana no elektriskās uz mehānisko
cE cM 2dz
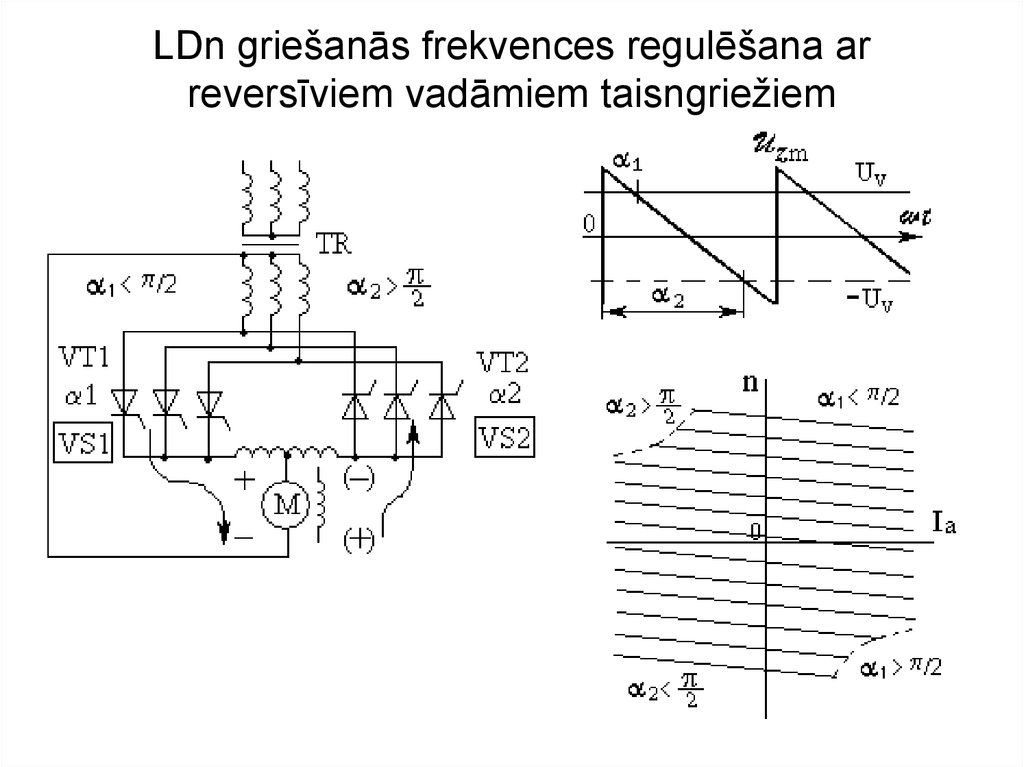
29. LDn griešanās frekvences regulēšana ar vadāmiem taisngriežiem
U d U d 0 cos I a (Ud0
n
2U sin
m
U d 0 cos I a REKV
cE
REKV
n
m
XT m
RT )
2
XT m
RT Ra
2
U d 0 cos MREKV
cE
c E cM 2
30.
Priekšrocības:1. Augsts lietderības koeficients
2. Plašs regulēšanas diapazons D>100:1
3. Ērta elektroniska mazas jaudas vadība
4. Liela vadības sistēmas ātrdarbība
Trūkumi:
1. Rada traucējumus elektriskā tīklā nesinusoidālas slodzes strāvas un sprieguma dēļ
2. Zems jaudas koeficients pie zemām griešanās frekvencēm un mazām slodzēm
3. Reversējamu piedziņu izveidošanai nepieciešama papildus komutācijas aparatūra
31. LDn griešanās frekvences regulēšana ar pusvadītāju impulsa regulatoriem
Priekšrocības:1. Plašs regulēšanas diapazons D>1000:1
2. Liela regulēšanas plūstamība
3. Augsta piedziņas ātrdarbība
4. Divzonu regulēšanas iespējamība
Trūkumi:
1. Darbojas tikai no līdzsprieguma avota
2. Reversēšanai nepieciešama papildus
kontaktaparatūra
3. Rada traucējumu el. tīklā un atmosfērā
ti
ti
ti t p T
nvid
U
U vid U
M vid Ra
,
2
cE cE cM
32. LDn griešanās frekvences regulēšana ar 2kvadrantu tranzistoru impulsregulatoru
33.
LDn griešanās frekvences regulēšana ar2kvadrantu tranzistoru impulsregulatoru
34.
LDn griešanās frekvences regulēšana arreversīviem vadāmiem taisngriežiem
35. LDn griešanās frekvences regulēšana ar reversīvo tranzistoru impulsregulatoru
36.
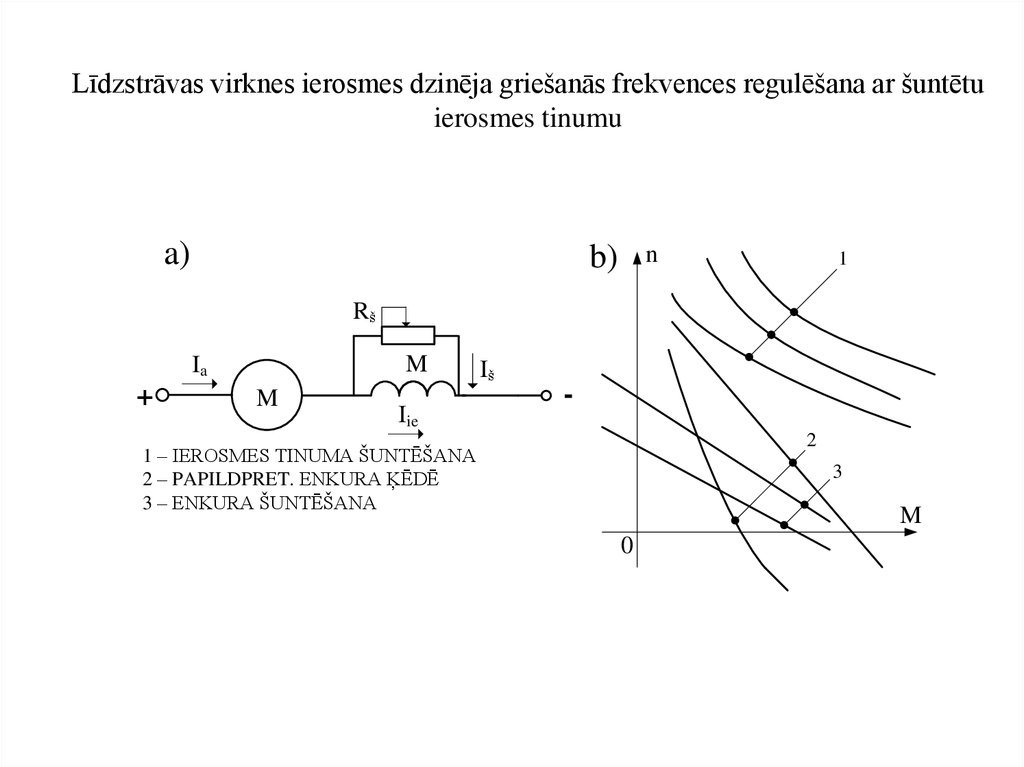
Līdzstrāvas virknes ierosmes dzinēja griešanās frekvences regulēšana ar šuntētuierosmes tinumu
a)
b)
n
1
Rš
M
Ia
+
M
Iie
Iš
2
1 – IEROSMES TINUMA ŠUNTĒŠANA
2 – PAPILDPRET. ENKURA ĶĒDĒ
3 – ENKURA ŠUNTĒŠANA
3
M
0