




 Электроника
ЭлектроникаПохожие презентации:







")


Электропривод и автоматизация оборудования лесного комплекса
1. ЭЛЕКТРОПРИВОД и АВТОМАТИЗАЦИЯ ОБОРУДОВАНИЯ ЛЕСНОГО КОМПЛЕКСА
Доцент кафедры«Автоматизации
производственных процессов»
Драчёв Валерий Андреевич
2.
ЗАДАНИЕ № 1Исходные данные задания:
- тип производственной установки – поточно-транспортная система (ПТС);
- подвид ПТС – ленточный односекционный реверсивный конвейер;
- тип ЭП – трёхфазный АД с короткозамкнутым ротором (АД с к.з.р.);
- номинальная мощность привода, кВт – дата (число) дня рождения
разработчика;
- синхронная частота вращения ЭП – месяц рождения разработчика;
- нечётные месяцы (варианты) – 1500 мин-1;
- чётные месяцы (варианты) – 1000 мин-1.
1.1 Произвести выбор электродвигателя из каталога (любого
производителя), который соответствует исходным данным задания
(трёхфазный АД с короткозамкнутым ротором, номинальная мощность,
синхронная частота вращения ротора двигателя ).
Серия и типоразмер АД ( например - 5А200L4)
Технические характеристики АД
!!! В том случае, если в каталогах отсутствует значение стандартной
мощности электродвигателя равной мощности по заданию, то производится
выбор электродвигателя с БЛИЖАЙШЕЙ БОЛЬШЕЙ стандартной мощностью
при заданной частоте вращения.
3.
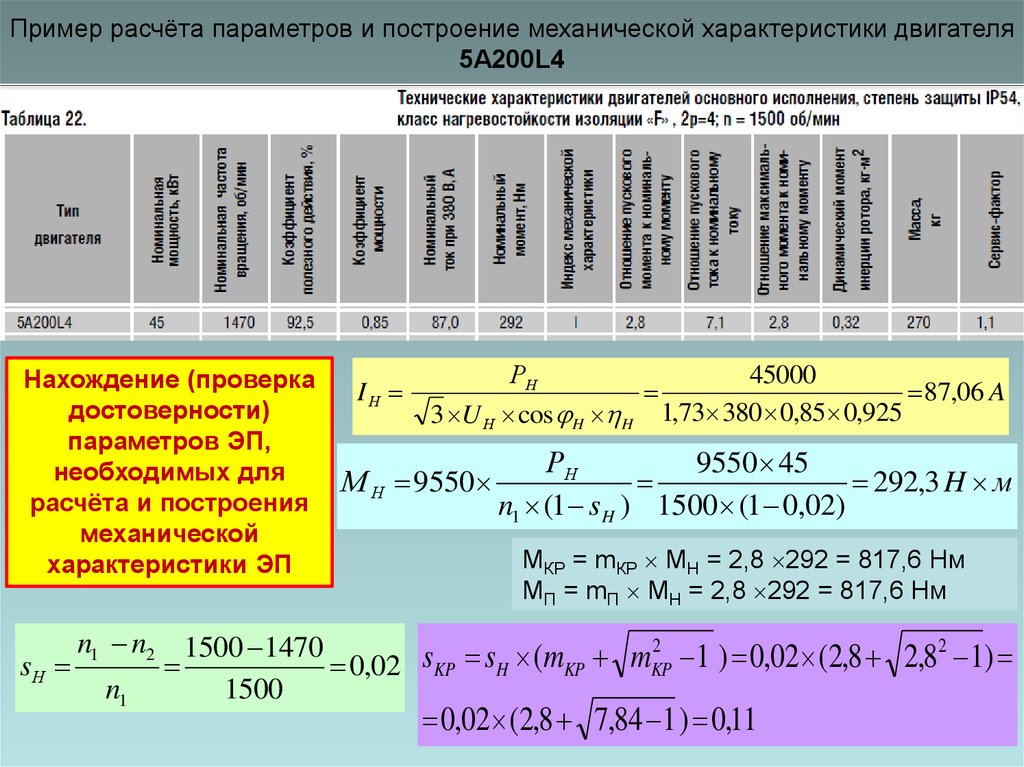
Пример расчёта параметров и построение механической характеристики двигателя5А200L4
Нахождение (проверка
достоверности)
параметров ЭП,
необходимых для
расчёта и построения
механической
характеристики ЭП
IН
РН
45000
87,06 A
3 U Н cos H H 1,73 380 0,85 0,925
М Н 9550
РН
9550 45
292,3 H м
n1 (1 sH ) 1500 (1 0,02)
МКР = mКР MH = 2,8 292 = 817,6 Hм
МП = mП MH = 2,8 292 = 817,6 Hм
2
2
n1 n2 1500 1470
s
s
(
m
m
1
)
0
,
02
(
2
,
8
2
,
8
1)
sН
0,02 KP H
KP
KP
n1
1500
0,02 (2,8 7,84 1 ) 0,11
4.
1.2 Построение механической характеристики выбранного ЭП(электродвигателя)
Механическая характеристика двигателя – это зависимость частоты
вращения ротора (n) двигателя от момента (М) на валу двигателя.
n = (М)
n1 – синхронная частота вращения магнитного поля статора, мин-1;
n2 – асинхронная частота вращения ротора, мин-1;
sН – номинальное электрическое скольжение;
sКР – критическое электрическое скольжение.
Для величин скольжения s в диапазоне sН < s < sКР должно быть рассчитано не
менее 7 (семи) численных значений момента двигателя М.
Для величин скольжения s в диапазоне sКР < s < 0,3 должно быть рассчитано не
менее 3 (трёх) численных значений момента М.
-1
n, мин
s
Рассчитать значения sН ,sКР, М (не менее 10 значений)
0
n
1
sН
n1 n2
n1
2
sKP sH (mKP mKP
1 )
nKP n2 (1 sKP )
0 1
М, Н м
2 М КР
М
s sKP
sKP
s
5.
Расчёт параметров и построение механической характеристики двигателяДля рабочего (двигательного) участка механической характеристики (sН – sКР) рассчитать
жёсткость механической характеристики.
Построить касательную к механической характеристике на участке (sН – 1,5 sН ).
Измерить угол наклона касательной
n s
n1
0
n2
sH
Коэффициент жёсткости β = tg α = ΔM / Δn
α
Δn
α
nКР
sКР
β = 2МКР / (sкр 0)
ω0 = (2π×n )/ 60
mП
МП
М НОМ
mКР
М КР
М НОМ
М КР М МАКС
При расчёте значения - значения
M и n в формуле должны быть
представлены
в
относительных
величинах от значений МH и n2
ΔM
1
mП
MН
MП
mКР
MКР
M, Н м
6.
1.3 Разработать электрическую принципиальную релейную схемууправления (ЭПРСУ) трёхфазным реверсивным асинхронным электроприводом с
короткозамкнутым ротором (АД с к.з.р.):
Функциональные возможности ЭПРСУ:
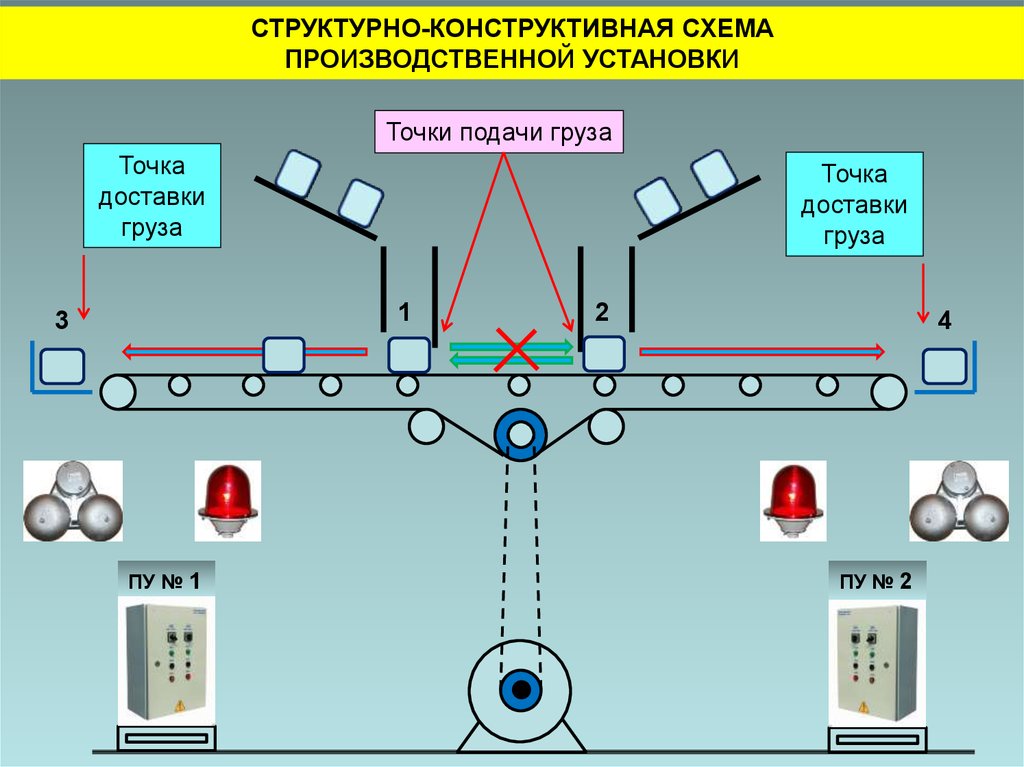
1 ручное дистанционное управление ЭП с двух рабочих мест;
2 работа ЭП в длительном режиме работы при перемещении груза из точки 1 в
точку 3 и из точки 2 в точку 4;
3 автоматический останов ЭП в функции «пути» в двух точках доставки груза (точки
3 и 4);
4 наличие предупредительной световой и звуковой сигнализации перед пуском ЭП
на время действия Δt1;
5 автоматическое включение электропривода по окончанию времени действия Δt1
предупредительной звуковой и световой сигнализации;
6 невозможность ручного дистанционного управления ЭП при отсутствии груза в
точках подачи 1 или 2 (наличие технологической блокировки);
7 возможность исключения действия технологической блокировки при управлении
ЭП (функциональная возможность изложенная в пункте 6);
8 автоматическое отключение ЭП в функции времени Δt2 после включения ЭП в том
случае, если время работ ЭП по перемещению груза из точек подачи груза 1 и 2 в точки
доставки груза 3 и 4 превышает стандартное время перемещения груза при работе
установки;
9 наличие и схемная реализация электрических защит электропривода и схемы
управления, согласно режима работы и обеспечения безопасных условий работы
обслуживающего персонала;
10 наличие световой сигнализации:
1 – направления движения ЭП;
2 – нахождения груза в точках подачи груза 1 и 2;
7.
СТРУКТУРНО-КОНСТРУКТИВНАЯ СХЕМАПРОИЗВОДСТВЕННОЙ УСТАНОВКИ
Точки подачи груза
Точка
доставки
груза
Точка
доставки
груза
1
3
ПУ № 1
2
4
ПУ № 2
8.
3 балла! - Правильное и в полном объёме выполненные задания пунктов1.1, 1.2, 1,3.
4 балла! 1.4 Произвести расчёт параметров и определить требуемые технические
характеристики и параметр электрической аппаратуры, используемой в схеме
управления.
1.5 Осуществить выбор электрической аппаратуры по каталогам заводов
изготовителей.
Исходными данными для расчёта параметров и определения технических
характеристик электрической аппаратуры являются:
- мощность ЭП;
- схемные и аппаратные решения (реализации) принятые при разработке
электрической
принципиальной
релейной
схемы
управления
электропривода
производственной установки.
Автоматические включатели (QF, SF)
Электротепловые реле (КК)
Реле времени (KT)
Ключи управления (SA )
Звуковая и световая аппаратура сигнализации
Кабельно-проводная продукция
Магнитные пускатели (KM)
Промежуточные реле (KL)
Кнопки управления (SB)
Конечные (путевые) включатели (SQ)
(HA, HL)
5 баллов!!!
1.6
Разработать
логическую
электропривода в LOGO!Soft Comfort (V7.0).
программу
управления