


 Промышленность
ПромышленностьПохожие презентации:

")








Этапы создания новой техники. Классификация навигационных систем. Параметры движения в пространстве
1.
Министерство образования и науки РФАРЗАМАССКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ (ФИЛИАЛ)
Федерального государственного бюджетного образовательного учреждения
высшего образования
«НИЖЕГОРОДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ
УНИВЕРСИТЕТ им. Р.Е.Алексеева»
Кафедра «Авиационные приборы и устройства»
Основы проектирования приборов и систем
Преподаватель Корнилов Анатолий Викторович
Модуль I. Основы проектирования информационноизмерительных приборов и систем
Раздел 1. Этапы создания новой техники
2.
Этапы создания новой техникиФундаментальные
исследования:
открытие
сущности
3
природных
процессов;
Поисковые исследования: выбор идеи для решения поставленной
задачи, результат исследований – открытия и изобретения;
Научно-исследовательские работы (НИР): прикладные исследования,
результат – принципиальная схема изделия более высокого технического
уровня;
Опытно-конструкторские работы (ОКР): направлены на материальное
воплощение результатов и рекомендаций НИР, результат - создание
технической документации и опытного образца функционирующего
изделия.
Конструкторская разработка на промышленных предприятиях:
прикладные работы для внедрения передового производственного опыта,
результат – локальные изменения под специфику производства
3.
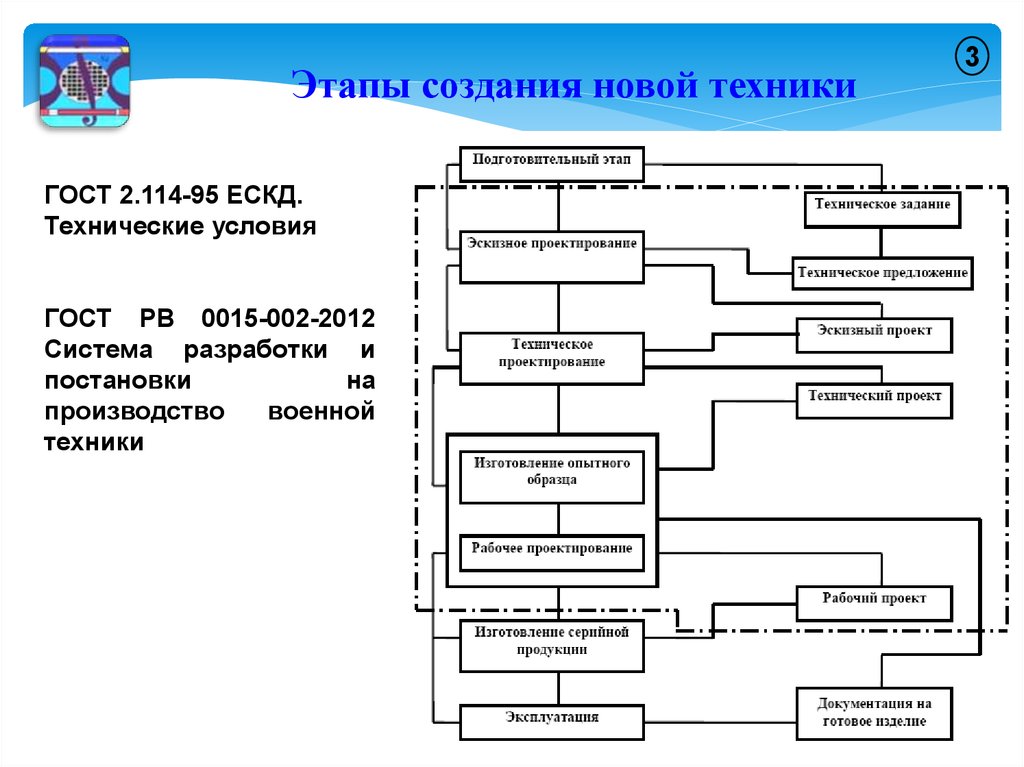
Этапы создания новой техникиГОСТ 2.114-95 ЕСКД.
Технические условия
ГОСТ РВ 0015-002-2012
Система разработки и
постановки
на
производство
военной
техники
3
4.
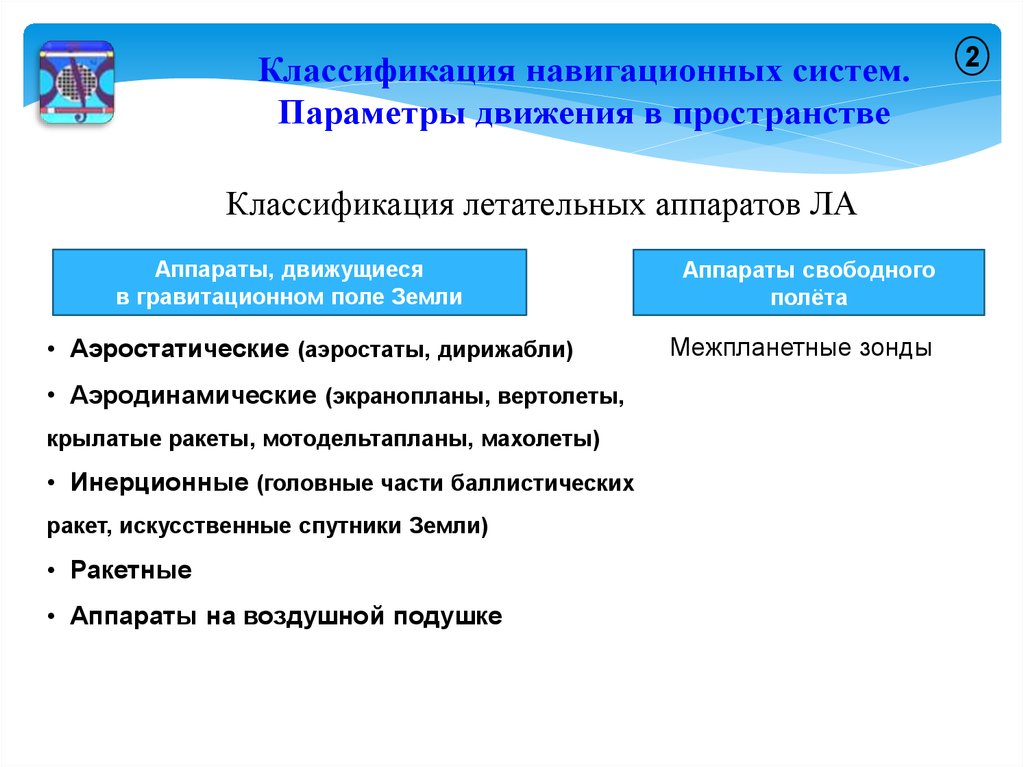
Классификация навигационных систем.Параметры движения в пространстве
Классификация летательных аппаратов ЛА
Аппараты, движущиеся
в гравитационном поле Земли
• Аэростатические (аэростаты, дирижабли)
• Аэродинамические (экранопланы, вертолеты,
крылатые ракеты, мотодельтапланы, махолеты)
• Инерционные (головные части баллистических
ракет, искусственные спутники Земли)
• Ракетные
• Аппараты на воздушной подушке
Аппараты свободного
полёта
Межпланетные зонды
2
5.
Классификация навигационных систем.Параметры движения в пространстве
2
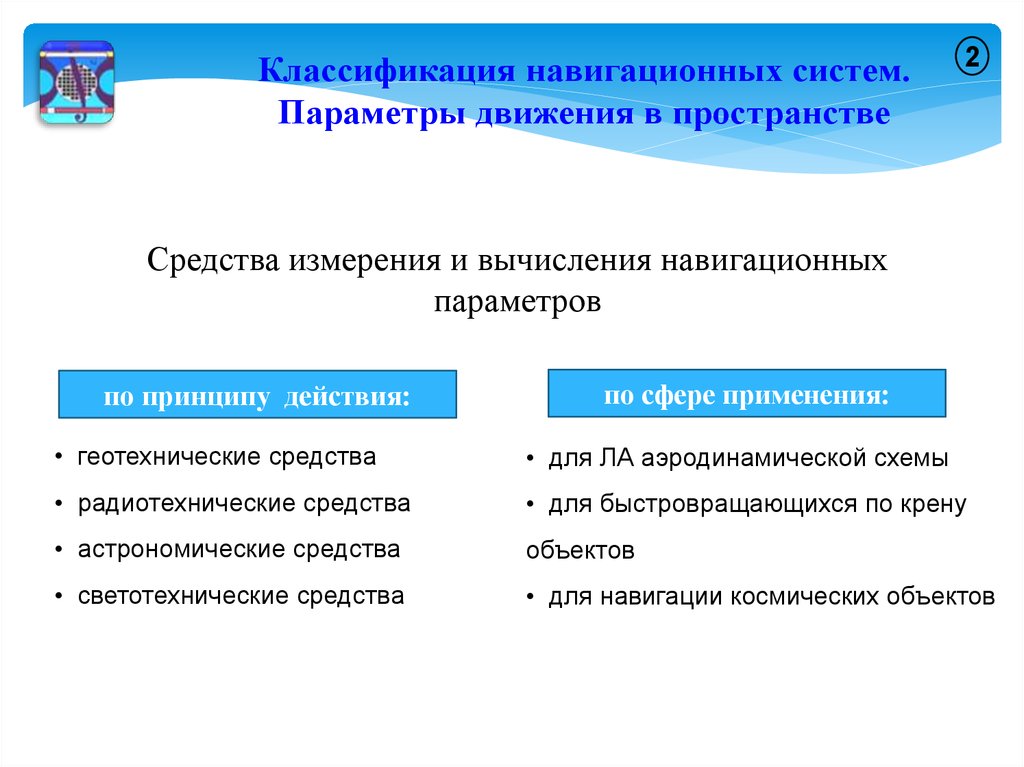
Средства измерения и вычисления навигационных
параметров
по принципу действия:
по сфере применения:
• геотехнические средства
• для ЛА аэродинамической схемы
• радиотехнические средства
• для быстровращающихся по крену
• астрономические средства
объектов
• светотехнические средства
• для навигации космических объектов
6.
Классификация навигационных систем.Параметры движения в пространстве
2
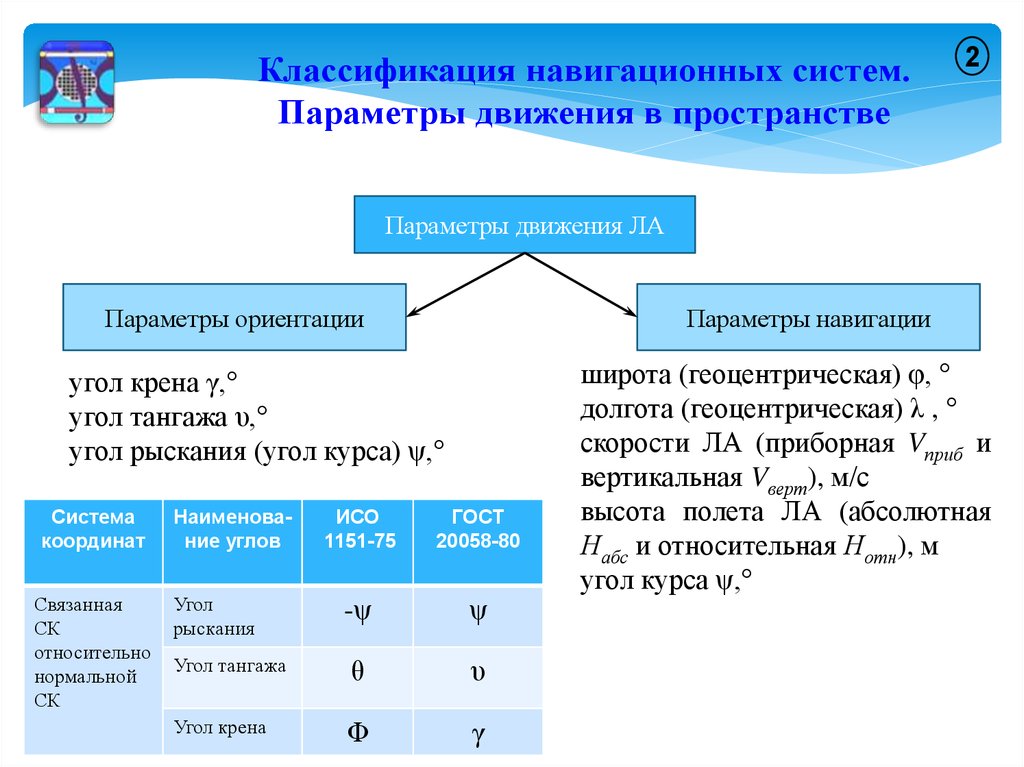
Параметры движения ЛА
Параметры ориентации
Параметры навигации
угол крена γ,°
угол тангажа υ,°
угол рыскания (угол курса) ψ,°
Система
координат
Связанная
СК
относительно
нормальной
СК
Наименование углов
ИСО
1151-75
ГОСТ
20058-80
-ψ
ψ
Угол тангажа
θ
υ
Угол крена
Φ
γ
Угол
рыскания
широта (геоцентрическая) φ, °
долгота (геоцентрическая) λ , °
скорости ЛА (приборная Vприб и
вертикальная Vверт), м/с
высота полета ЛА (абсолютная
Набс и относительная Нотн), м
угол курса ψ,°
7.
Классификация навигационных систем.Параметры движения в пространстве
Форма Земли и ее геометрические модели
Геодезическая СК
геодезическая широта В
геодезическая долгота L
Нормальная сферическая
(геоцентрическая) СК
геоцентрическая долгота λ=L
B 11'31''sin 2B
2
8.
Классификация навигационных систем.Параметры движения в пространстве
Параметры движения ЛА
Угол рыскания
(курса)
Угол крена
Угол тангажа
2
9.
Классификация навигационных систем.Параметры движения в пространстве
2
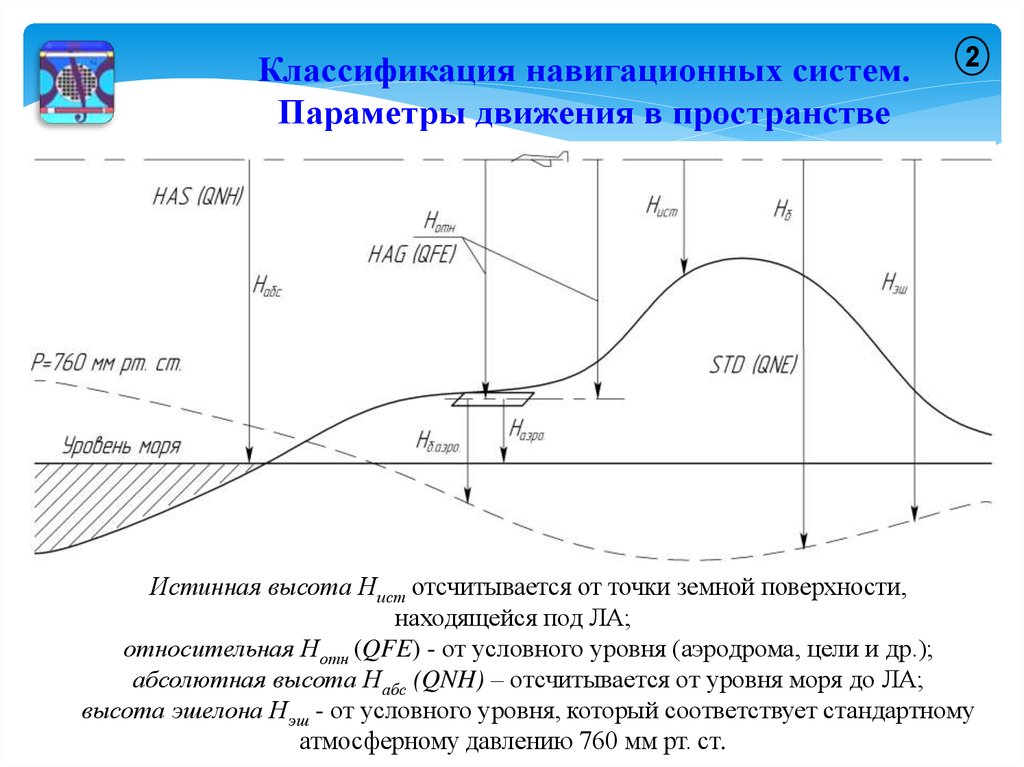
Истинная высота Нист отсчитывается от точки земной поверхности,
находящейся под ЛА;
относительная Нотн (QFE) - от условного уровня (аэродрома, цели и др.);
абсолютная высота Набс (QNH) – отсчитывается от уровня моря до ЛА;
высота эшелона Нэш - от условного уровня, который соответствует стандартному
атмосферному давлению 760 мм рт. ст.
10.
Классификация навигационных систем.Параметры движения в пространстве
2
Скорость ЛА (V) - скорость движения
ЛА (его центра масс) относительно воздушной среды, не
возмущенной самим ЛА.
Дозвуковая
Гиперзвуковая
Сверхзвуковая
Околозвуковая
Истинная
Индикаторная
Приборная