



























 Промышленность
ПромышленностьПохожие презентации:






 в авиации")



Директорное и автоматическое управление боковым траекторным движением при заходе на посадку
1.
ТЕМА № 3 УПРАВЛЕНИЕ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ ПРИЗАХОДЕ НА ПОСАДКУ
Тема лекции 14. Директорное и автоматическое управление
боковым траекторным движением при заходе на посадку
ЛИТЕРАТУРА
1. [1] стр. 361-371
ВВЕДЕНИЕ
Завершающий этап полета самолета является наиболее ответственным
участком движения самолета и условно разделяется на предпосадочный
маневр (заход на посадку) и саму посадку
Задача предпосадочного маневрирования самолета (захода на посадку) состоит в
том, чтобы вывести ЛА в точку воздушного пространства относительно аэродрома
посадки с таким расчетом, чтобы самолет находился на продолжении ВПП на
определенной высоте и скорости. В этой области происходит «принятие решения»
о посадке или об уходе на второй круг.
2.
Осуществление управления самолетом может происходить одним изизвестных способов: ручном (штурвальном), автоматическом , директорном,
совмещенным и комплексным
3.
Основные способы управления траекторным движением самолета при заходена посадку:
• ручное (штурвальное)
Пилот по наземным ориентирам с использованием автоматических средств
улучшения устойчивости и управляемости (демпфер, автомат устойчивости и
автомат управляемости) выводит самолет на требуемую траекторию для завершения
захода на посадку. )
пилот – управляет, автоматика –улучшает устойчивость и управляемость
• автоматическое управление
Автоматика формирует управляющие сигналы на рулевые поверхности.
Пилот исключается из контура управления и осуществляет функции более
высокого иерархического уровня:
• он задает программу траектории захода самолета на посадку,
• контролирует выполнение автоматикой этой программы,
• осуществляет визуальную привязку к наземным ориентирам (если позволяют
метеорологические условия),
• принимает оперативные решения по отключению режима автоматического
управления с переходом на более низкий уровень автоматизации.
автоматика – управляет, пилот контролирует
4.
Промежуточныедвижением самолета:
полуавтоматические
режимы
управления
траекторным
• директорное
автоматизирована
обработка
информации,
ее
комплексирование
и
формирование директорного сигнала на командные (директорные) приборы в виде
отклонений командных индексов или стрелок. Пилот управляет самолетом в
режиме ручного управления, стремясь воздействием на органы управления
совместить командные стрелки с центром прибора, выдерживая тем самым
заданную автоматикой траекторию полета. Автоматические средства при этом
решают задачи улучшения устойчивости и управляемости самолета.
• совмещенное
Осуществляется чередование режимов директорного управления и
автоматического управления на отдельных участках траектории полета самолета,
когда пилот прекращает воздействие на органы управления. Начало одного режима
совмещено, согласовано с концом предыдущего режима.
• комбинированное
Возможно одновременное управление пилотом и автоматикой в соответствии с
определенной логикой взаимодействия директорного и автоматического
управления.
5.
14.1.Основной критерий классификация систем
посадки
Основным критерием классификации систем посадки самолета является их
способность обеспечивать посадку в условиях различных метеорологических и
посадочных минимумов.
Метеорологический минимум посадки (минимум погоды для посадки) минимально допустимые значения высоты нижней границы облачности (ВНГО) и
наклонной дальности видимости (НДВ), при которых обеспечивается возможность
безопасной посадки. Характеризует сложность погодных условий, в которых
осуществляются заход на посадку и посадка самолета.
Метеоминимумы устанавливаются для аэродрома, типа ВС и КВС. В конкретном
случае минимум определяется из трёх выше перечисленных по наивысшему из них.
Т.о. Значение метеоминимума состоит из двух чисел – минимальное
значение ВНГО и минимальное значение дальности видимости, например 60x800.
Высота нижней границы облачности (сокр. ВНГО) - относительная высота
над земной или водной поверхностью основания нижнего слоя облаков,
находящегося ниже 6000 м (20 000 фут.) и закрывающего более половины
неба.
6.
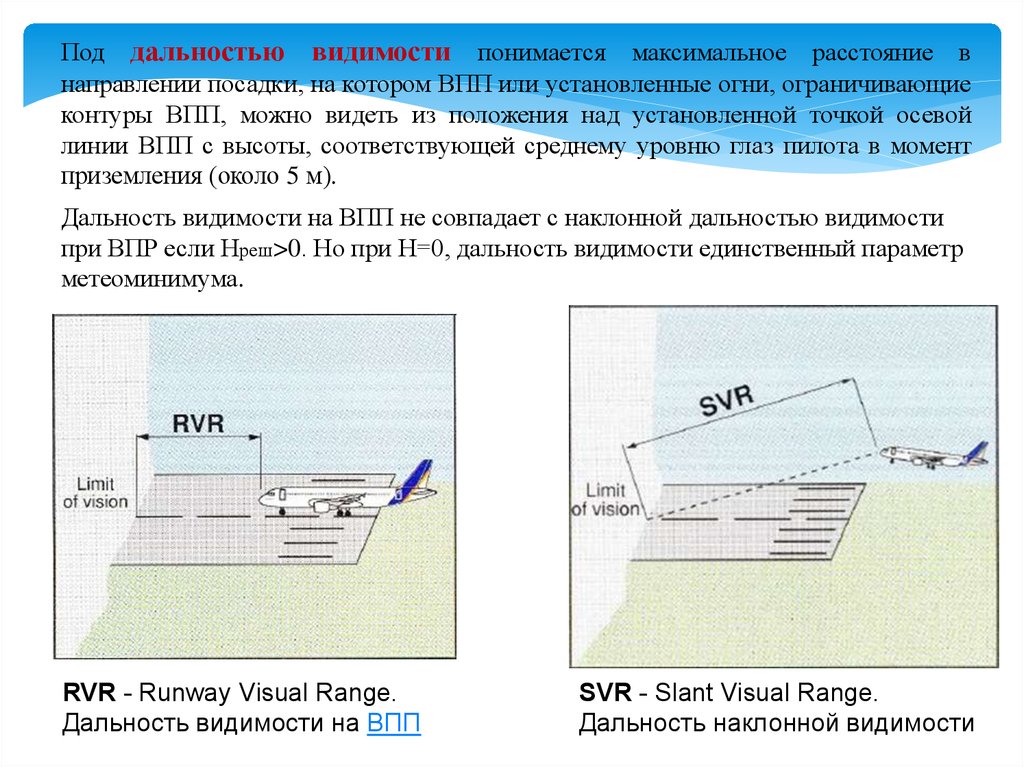
Под дальностью видимости понимается максимальное расстояние внаправлении посадки, на котором ВПП или установленные огни, ограничивающие
контуры ВПП, можно видеть из положения над установленной точкой осевой
линии ВПП с высоты, соответствующей среднему уровню глаз пилота в момент
приземления (около 5 м).
Дальность видимости на ВПП не совпадает с наклонной дальностью видимости
при ВПР если Нреш>0. Но при Н=0, дальность видимости единственный параметр
метеоминимума.
RVR - Runway Visual Range.
Дальность видимости на ВПП
SVR - Slant Visual Range.
Дальность наклонной видимости
7.
Этапы захода на посадку в соответствии с понятием метеоминимума.Первый происходит в условиях отсутствия видимости земли и наземных
ориентиров. Предусматривает директорное (по приборам) или автоматическое
управление полетом самолета.
Второй этап проходит в условиях наличия видимости земли и
возможности визуальной привязки к наземным ориентирам. Осуществляется в
режимах автоматического, директорного или ручного управления.
Переход с первого этапа посадки на второй и определяет точку метеоминимума посадки.
В процессе полета наступает момент, когда летчик должен определить для себя,
посадочное ли положение у самолета. А именно:
- есть ли визуальный контакт с ВПП?
- В створе ли полосы идет машина?
- Движение самолёта происходит по осевой линии ВПП?
- На заданной ли высоте и с заданной ли скоростью идет самолет?
Если ответ на все эти вопросы — «да», то положение посадочное, и КВС принимает
решение садиться.
Любое иное должно означать единственное решение: уход на второй круг.
8.
Высота принятия решения (ВПР) - параметр, характеризующийпредельную высоту для посадки. Это - установленная относительная
высота, (QFE) на которой должен быть начат маневр ухода на второй круг
в случаях, если до достижения этой высоты не установлен надежный
визуальный контакт с ориентирами для продолжения захода на
посадку или если положение самолета в пространстве относительно
.
заданной траектории полета
в этот момент не обеспечивает
безопасность посадки.
Decision Altitude (Height)
За 30 м до ВПР командиру экипажа следует запрос: «Оценка?», и тогда капитан обязан
оторвать взгляд от приборов, установить визуальный контакт с землей и оценить
положение. Через 6-7 секунд после команды «Оценка» следует запрос: «Решение?»,
после чего КВС должен окончательно принять решение, сажать ли самолет, или уходить
на второй круг.
До ВПР пилот может сужать конус отклонений, и на ВПР все отклонения должны быть
сведены к нулю.
9.
Международной организацией ИКАО введены категории посадочныхминимумов (категории посадки), каждая из которых характеризуется
высотой принятия решения и дальностью видимости на ВПП.
Классификация категорий приведена в табл. 3.1.
Посадочный минимум (категории посадки), определяется многими
факторами: точностными характеристиками пилотажно-навигационного
комплекса,
аэродинамическими
качествами
и
маневренными
характеристиками самолета, степенью оборудованости аэродрома
посадочными средствами, квалификацией экипажа и т.д.
10.
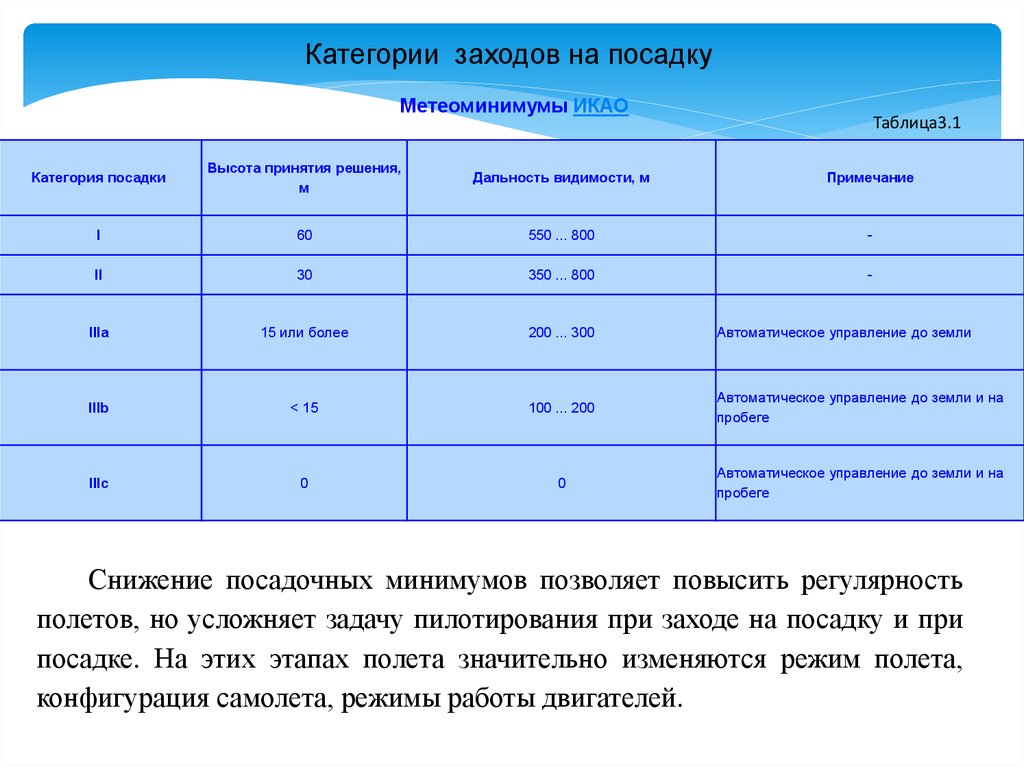
Категории заходов на посадкуМетеоминимумы ИКАО
Таблица3.1
Категория посадки
Высота принятия решения,
м
Дальность видимости, м
Примечание
I
60
550 ... 800
-
II
30
350 ... 800
-
IIIa
15 или более
200 ... 300
Автоматическое управление до земли
IIIb
< 15
100 ... 200
Автоматическое управление до земли и на
пробеге
IIIc
0
0
Автоматическое управление до земли и на
пробеге
Снижение посадочных минимумов позволяет повысить регулярность
полетов, но усложняет задачу пилотирования при заходе на посадку и при
посадке. На этих этапах полета значительно изменяются режим полета,
конфигурация самолета, режимы работы двигателей.
11.
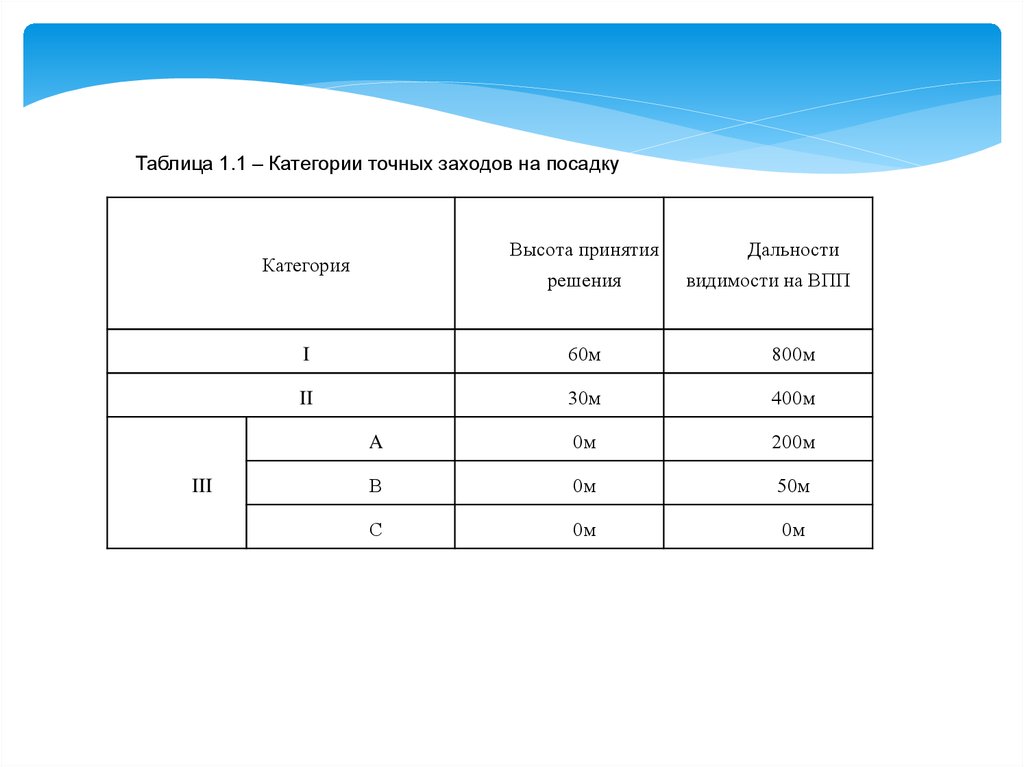
Таблица 1.1 – Категории точных заходов на посадкуВысота принятия
Категория
III
решения
Дальности
видимости на ВПП
I
60м
800м
II
30м
400м
A
0м
200м
В
0м
50м
С
0м
0м
12.
Категорированные метеоминимумы ИКАО, для обеспечения полётов в СМУ.делятся на I,II,IIIA,IIIB и IIIC категории:
•CAT I - точный заход на посадку и посадка по приборам с ВПР не менее 60м и, либо
при видимости не менее 800м, либо при дальности видимости на ВПП не менее 550м
•CAT II - точный заход на посадку и посадка по приборам с ВПР менее 60м, но не
менее 30м и при дальности видимости на ВПП не менее 350м
•CAT III A - точный заход на посадку и посадка по приборам: а) с ВПР менее 30м или
без ограничения по ВПР; б) при дальности видимости на ВПП не менее 200м
•CAT III B - точный заход на посадку и посадка по приборам: а) с ВПР менее 15м или
без ограничения по ВПР; б) при дальности видимости на ВПП менее 200м, но не
менее 50м
•CAT III C - точный заход на посадку и посадка по приборам без ограничения
по ВПР и дальности видимости на ВПП
Примечание: Если ВПР и дальность видимости на ВПП подпадают под равные
категории, то категория, к которой следует относить данный полет, может определяться
либо ВПР, либо дальностью видимости на ВПП. Полет будет выполняться по категории
с более низкими минимумами.
13.
14.2 Классификация применяемых систем посадки. Параметры движениясамолета при заходе на посадку по радиотехническим системам посадки
Посадкой называется движение ЛА, начинающееся с момента прохождения
самолетом высоты условного препятствия на завершающем этапе полета (обычно
принимается Нс.п.=15м) и заканчивающееся в момент полной остановки самолета
по окончанию пробега
По принципу действия системы посадки подразделяются на:
оптические;
микроволновые;
радиотехнические;
радиолокационные;
электромашинные;
радиоизотопные;
лазерные;
инерциальные;
комбинированные.
14.
В настоящее время широкое распространение получили только радиотехническиекурсоглиссадные средства посадки
Системы СП-50, СП-75, СП-80, СП-90, СП-200 удовлетворяют требованиям
ИКАО в части обеспечения посадки по I, II и III-й категориям (в зависимости от
модификации) и являются аналогом международной системы ILS.
Задачей этих систем является формирование траекторий посадки, по которым
должен снижаться самолет для вывода его в точку приземления на ВПП. Эта
траектория задается пересечением двух плоскостей: плоскости курса и плоскости
планирования. При заходе на посадку бортовая РТС измеряет угловое отклонение
самолета от заданной траектории в горизонтальной и вертикальной плоскостях и
выдает эту информацию на директорные приборы СТУ и в САУ. РТС
инструментальной посадки состоит из комплексов наземного и бортового
оборудования.
В состав наземного комплекса входят: курсовой радиомаяк (КРМ), глиссадный
радиомаяк (ГРМ), дальняя и ближняя приводные радиостанции (ДПРС и БПРС),
дальний и ближний маркерные радиомаяки (ДМРМ и БМРМ).
15.
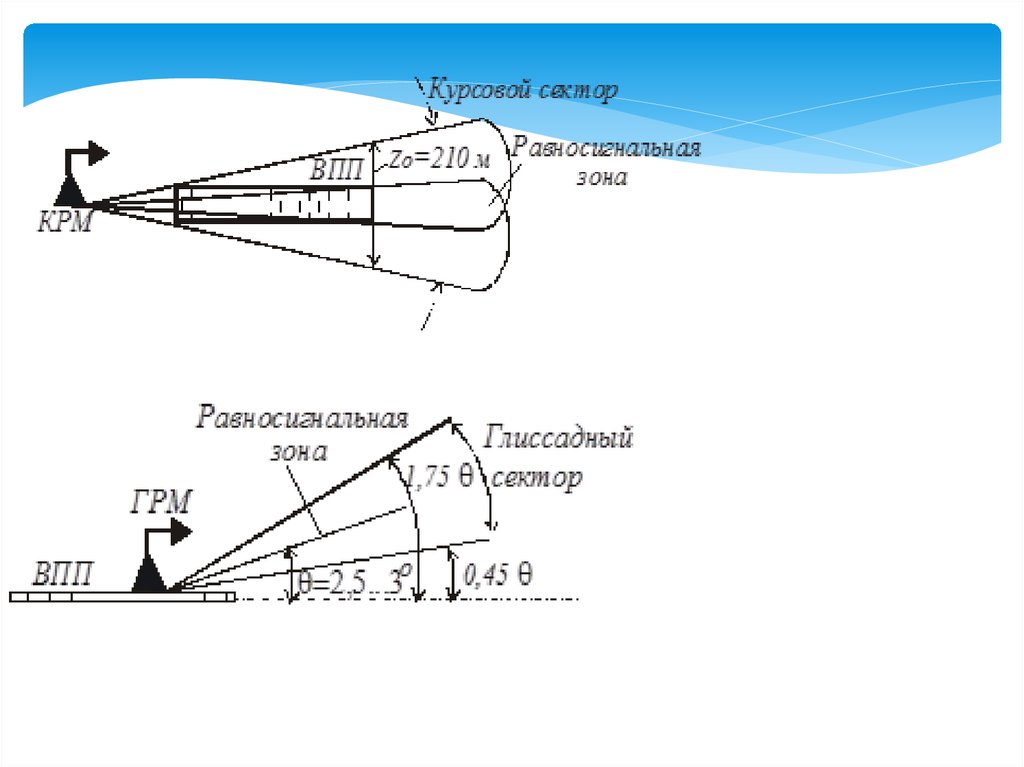
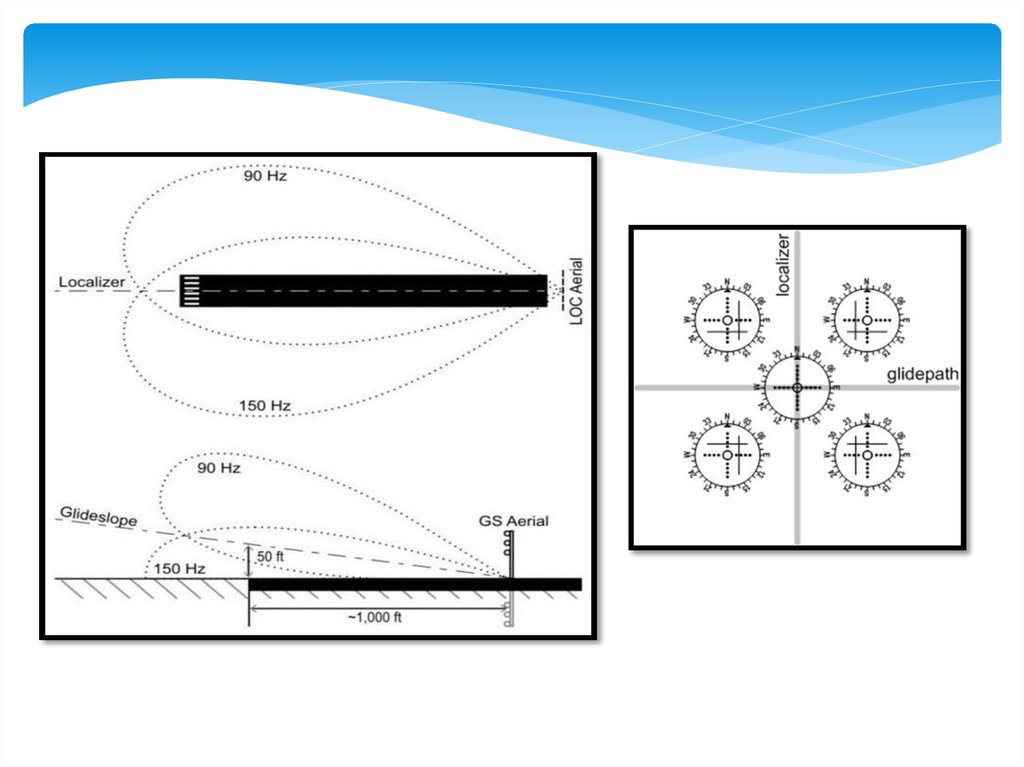
Cистемы посадки типа ILSа) курсо-глиссадные системы – обеспечивают формирование траектории посадки
(рис. 1), как пересечение двух плоскостей, построенных излучением специальных
радиомаяков.
16.
17.
18.
Схема размещения радиомаяков радиотехнической системы посадки СП-50 (ILS)КРМ
ГРМ
БПРС
МРМ
ГРМ
КРМ
МРМ
ДПРС
19.
В состав бортового комплекса входят: курсовой, глиссадный и маркерныйрадиоприемники (КРП, ГРП и МРП) (система «Курс-МП») и работающие с
ними совместно автоматический радиокомпас (АРК), радиовысотомер малых
высот (РВ).
Радиотехнические инструментальные системы посадки метрового
диапазона имеют ряд существенных недостатков. В частности, линия курса и
глиссады подвержена сильному влиянию подстилающей поверхности,
окружающих местных предметов.
Пропускная способность низка, т.к. позволяет обеспечить заход на посадку
с одного направления.
Большие помехи от самолетов, движущихся близко к посадочному ВС,
приводят к помехам измерения параметров ВС.
Кроме того, с их помощью нельзя обеспечить оптимальные траектории
посадки для различных типов самолетов.
20.
В настоящее время заход на посадку и посадка в ᴄᴫᴏжных условиях припониженной RVR(дальность видимости) осуществляется по системе ILS. ILS
для посадки при пониженном минимуме используется на мировом уровне, но
наиболее часто — в Великобритании и Западной Европе. Во всем мире более
2500 ВПП оборудовано системой ILS, но только 90 из них сертифицировано
для посадки по III категории ᴄᴫᴏжности, причем около 2/3 установлено в
Европе. ILS обеспечивает заход на посадку при RVR не меньше 550 м. а в
некоторых случаях даже не меньше 300 м. При более низкой видимости
посадка ВС либо задерживается до улучшения погоды, либо он отправляется
в запасной аэропорт.
21.
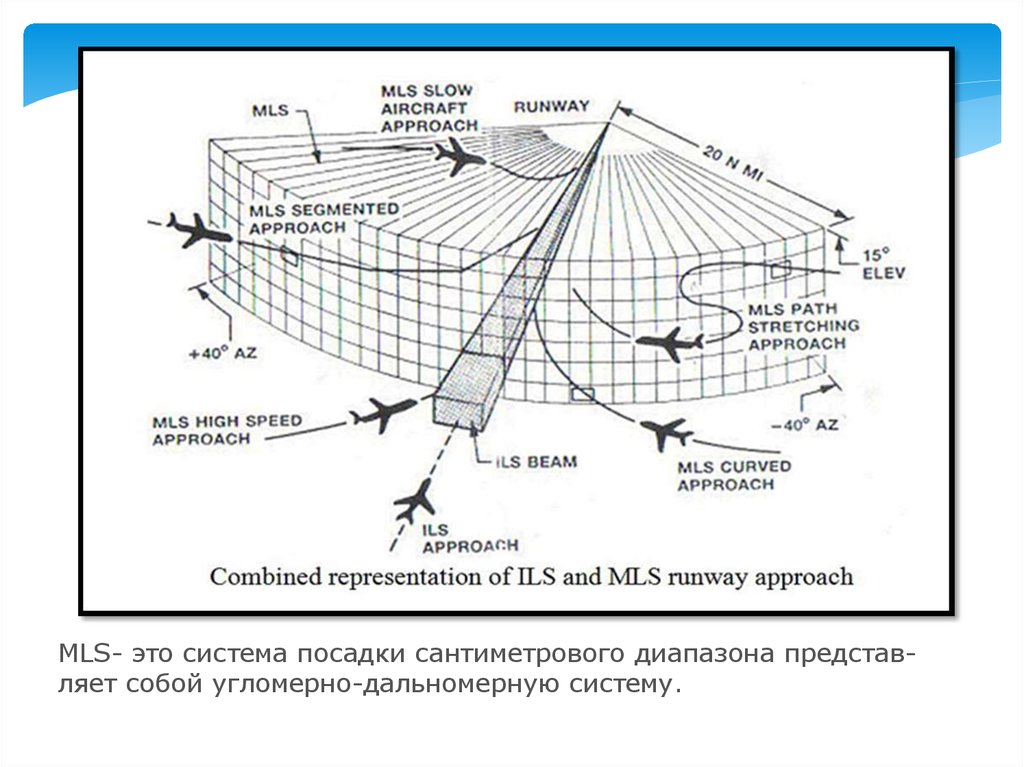
MLS- это система посадки сантиметрового диапазона представляет собой угломерно-дальномерную систему.22.
Бортовое радиотехническое оборудование посадки MLS должно обеспечиватьпри работе с наземными маяками:
• определение положения ЛА по азимуту, углу места и дальности относительно
соответствующих маяков;
• определение положения самолета относительно заданной траектории с
требуемой точностью и до высот, соответствующих посадочному минимуму,
установленному для данного типа ЛА;
• выдачу азимутальной, угломестной и дальномерной информации и
информации об отказах для визуальной индикации экипажу и в виде
электрических сигналов в другое бортовое оборудование, если эти сигналы
используются;
• прием разовых команд (запрет перестройки, воздух – земля, взлет –
посадка), выдаваемых другими бортовыми системами, необходимых для
обеспечения выполнения оборудованием MLS требуемых функций;
• выдачу электрических сигналов об основных и вспомогательных данных,
передаваемых маяками MLS и индикацию основных данных.
В соответствии с решаемыми задачами, в MLS выделяют независимые, друг от
друга, угломерную (УПС) и дальномерную (ДПС) подсистемы.
23.
Микроволновая система посадки представляет собой комплексбортового и наземного оборудования.
В бортовое оборудование входят:
Ø угломерные приемоизмерительные блоки;
Ø дальномерный приемопередающий блок;
Ø антенны;
Ø пульт управления.
На земле устанавливаются:
Ø азимутальные станции (КРМ-I, КРМ-2);
Ø угломестные станции (ГРМ-I, ГРМ-2);
Ø радиодальномер.
24.
Рис.10. Зона действия маяка MLS: а) в горизонтальнойплоскости; б) в вертикальной плоскости; 1 – заход на
посадку; 2 – пробега и ухода на второй круг; 3 – ухода на
второй круг.
25.
Дифференциальная глобальная спутниковая система DGPS.Система DGPS дает возможность использовать два варианта автоматической
посадки, полностью отвечающие требованиям точности при заходе на посадку и
посадке по I категории ICAO.
Система LAAS (система наведения для местного региона) является наземной системой,
непрерывно сравнивающей отраженный сигнал DGPS с посланным ею, определяющей
рассогласование и передающей его на борт ВС, выполняющего заход на посадку. Ошибка
наведения системы не превышает 7 м. (Scat-1 )
Система автоматической посадки WAAS (система наведения для большой площади
перекрытия).
WAAS ( wide area augmentation system) — система распространения поправок к
данным, передаваемым навигационной системой GPS.
Разработана американской организацией FAA ( Federal Aviation Administration);
Действует на территории Северной Америке. Создаваемые в Европе система
EGNOS (Европейская спутниковая геостационарная навигационная система большой
площади перекрытия) и японская система MTSAS (многоцелевая спутниковая система
наведения), российская ГЛОНАС подобны системе WAAS.
Система WAAS дополняет GPS, повышая точность определения координат.
Создавалась в первую очередь для определения положения воздушного судна
во время посадки.
26.
27.
14.3 Директорное управление самолетом на этапе захода на посадкуПод ручным управлением подразумевается такое управление , при котором
летчик посредством своих органов чувств получает информацию о состоянии
объекта управления — летательного аппарата, о воздействии на него внешней
среды, о положении рычагов управления и усилиях на них и на основе
осмысливания принятой информации осуществляет перемещение рычагов
управления с целью минимизации ошибки управления
Сигналы, поступающие от приборов, принято называть инструментальной
информацией, а непосредственное воздействие физических факторов
управляемого процесса на летчика (угловые и линейные ускорения, вибрация,
шумы, усилия на рычагах управления и внекабинная визуальная информация)
относят к неинструментальной информации
28.
Средства отображения информации и органы управления ЛА, размещенные вкабине экипажа, образуют информационно-управляющее поле кабины. Для
летчика основным источником информации является система отображения
информации.
Вследствие ограниченных психофизиологических возможностей человека
по приему и переработке информации он в ряде случаев не в состоянии
выполнять возлагаемые на него функции по управлению ЛА с необходимой
надежностью. Почти 50% катастроф в гражданской авиации происходит изза ошибок летных экипажей (по зарубежной информации)
29.
Классификация ошибочных действий летчикаПроцент ошибок каждой категории на разных ЛА
Категории ошибок
реактивные.
самолеты
| винтомо-
вертолеты
торные [
самолеты]
Невосприятие речевой, звуковой, тактильной,
оптической информации
16,3
13,4
6,7
Неправильная оценка
31,0
24,2
5,6
приборной информации
Неправильное восприятие пространственного
положения в одиночном или
групповом полете
18,7
Неправильные двигательные действия
48,0
36,2
8,0
Нераспознавание аварийной ситуации, ошибочные
действия в аварийной ситуации
28 2
12,2
9,4
0
12,3
1
30.
Модель пилота описывается последовательным соединением пяти элементарныхзвеньев.
Wп (p) k п e
p
(T3p 1)
(T1p 1)(T2 p 1)
Первое звено kп характеризует коэффициент передачи пилота как субъекта управления,
зависящий от градиента усиления нагрузки на отклонение органа управления.
Второе звено τ характеризует запаздывание реакции пилота на принимаемую
приборную, визуальную или слуховую информацию.
Третье звено Т1 определяет инерционность нервной системы пилота обусловленную
необходимостью выработки решения в результате обобщения полученной информации.
Четвертое звено Т2 отражает инерционность двигательной (мышечной) системы пилота
Пятое звено учитывает свойство пилота, заключающееся в стремлении
скомпенсировать свою инерционность созданием форсирующих, упреждающих
сигналов с постоянной времени Т3
Т2 и τ составляют десятые доли секунды
31.
Поиск путей совершенствования контуров управления ЛА с участием человекапривел в свое время к так называемому директорному управлению полетом. Этот
способ управления появился как средство преодоления некоторых недостатков
ручного управления самолетом и недостаточной надежности средств
автоматического управления «в большом».
Схема директорного управления ЛА
Система директорного управления заходом на посадку включает систему
ручного (штурвального) управления, охваченную дополнительным контуром,
формирующим на пилотажно-командном приборе командные сигналы. На пилота
возлагается задача обнуления этих командных сигналов.
32.
При директорном управлении уровень сложности управления резко понижаетсяи приближается по степени напряженности работы летчика к задаче выдерживания
по приборам заданного углового положения ЛА.
Траекторию полета самолета в пространстве можно рассматривать состоящей из двух
составляющих: в горизонтальной и вертикальной плоскостях.
На директорный прибор целесообразно выводить два командных сигнала: координату
управления боковым движением z бок и продольным движением самолета h прод
Как показали исследования, наиболее удобными координатами при управлении
боковым траекторным движением является угол крена самолета, а при управлении
продольным траекторным движением - угол тангажа или интеграл нормальной
перегрузки. Такой выбор координат управления позволяет обеспечить
минимальную загрузку пилота, реализацию закона управления вычислителя с
большой степенью унификации для директорного и автоматического режимов,
плавное переключение с директорного режима на автоматический и наоборот.
33.
Переход к автоматическому управлению происходит путем подключения основноговычислителя к сервоприводу каналов автоматического управления
Связь директорного и автоматического управления ЛА
При директорном управлении летчик должен по существу выполнять функции
сервопривода.
34.
Способы выдачи пилоту командного сигнала.Первый способ предполагает использование командных
индексов, на которые подаются сигналы, пропорциональные
углам крена и тангажа. В этом случае задача пилота
заключается в совмещении путем отклонения элеронов и
рулей высоты указателей текущих углов крена и тангажа с
индексами. Отклонение указателя текущего угла крена от
индекса заданного угла крена указывает на необходимость
изменения текущего угла крена таким образом, чтобы
указатель текущего угла крена находился напротив индекса
заданного угла крена.
35.
23
4
5
1
20
10
6
10
20
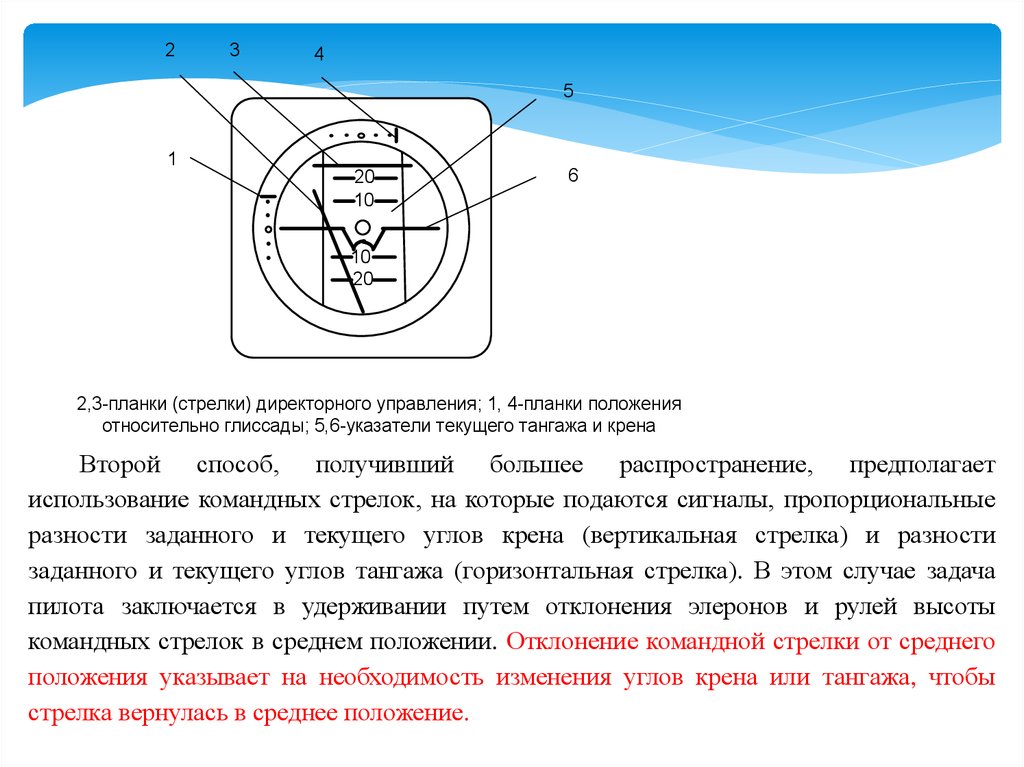
2,3-планки (стрелки) директорного управления; 1, 4-планки положения
относительно глиссады; 5,6-указатели текущего тангажа и крена
Второй способ, получивший большее распространение, предполагает
использование командных стрелок, на которые подаются сигналы, пропорциональные
разности заданного и текущего углов крена (вертикальная стрелка) и разности
заданного и текущего углов тангажа (горизонтальная стрелка). В этом случае задача
пилота заключается в удерживании путем отклонения элеронов и рулей высоты
командных стрелок в среднем положении. Отклонение командной стрелки от среднего
положения указывает на необходимость изменения углов крена или тангажа, чтобы
стрелка вернулась в среднее положение.
36.
Пилот осуществляет операцию интегрирования сигнала положения стрелкии реализует при этом передаточную функцию
В директорной системе управления динамика процессов определяется в основном
законом управления вычислителя и в меньшей степени зависит от квалификации
пилота.
Если в ручном режиме управления пилот сам формирует команды управления,
то в директорном он выполняет команды, формируемые вычислителями СТУ.
Система директорного управления обеспечивает высокую точность
пилотирования на участках полета малой длительности, однако, из-за большой
концентрации внимания на директорном приборе ослабляется контроль за
приборным оборудованием и окружающей обстановкой, что увеличивает время
обнаружения отказа и уменьшает вероятность своевременного определения
нарушения режима полета.
37.
14.4 Принцип действия системы бокового траекторного управленияпри заходе на посадку.
Управление боковым траекторным движением самолета при заходе на посадку
производится пилотом визуально по наземным ориентирам и по приборам. Наблюдая
за изменением курса самолета по указателю курса командного прибора, пилот
воздействует на баранку штурвала, и отклоняет элероны таким образом, чтобы
совершить последний разворот в сторону ВПП и затем удерживать самолет по курсу
ВПП. В автоматическом режиме формируется траектория захода на посадку и
стабилизируется ЛА на траектории. При этом возможно осуществить два способа
предпосадочного маневра самолетом в : маршрутным и курсовым
Rр
маршрутный метод:
предпосадочный маневр
осуществляется с
построением ЛЗП,
проходящую через КПМ
(конечный пункт маршрута) и
касательной к дуге разворота
самолета с радиусом Rр для
выхода самолета на ось ВПП в
точке четвертого разворота (А)
38.
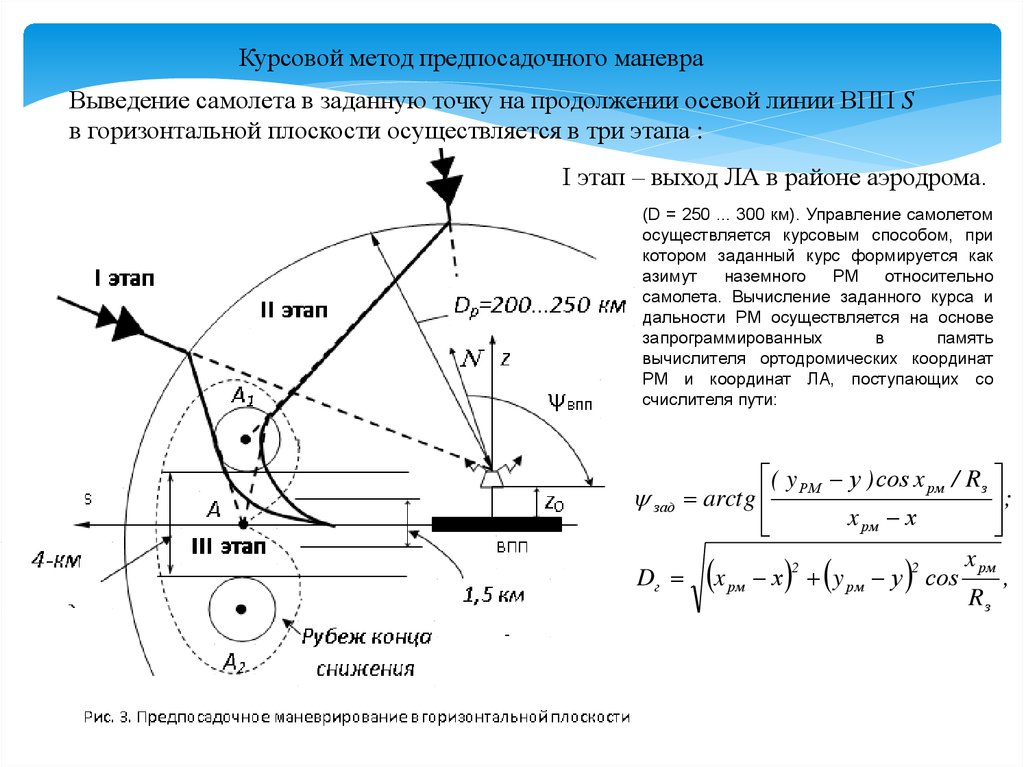
Курсовой метод предпосадочного маневраВыведение самолета в заданную точку на продолжении осевой линии ВПП S
в горизонтальной плоскости осуществляется в три этапа :
I этап – выход ЛА в районе аэродрома.
(D = 250 ... 300 км). Управление самолетом
осуществляется курсовым способом, при
котором заданный курс формируется как
азимут
наземного
РМ
относительно
самолета. Вычисление заданного курса и
дальности РМ осуществляется на основе
запрограммированных
в
память
вычислителя ортодромических координат
РМ и координат ЛА, поступающих со
счислителя пути:
( y РМ у ) сos x рм / Rз
;
x рм х
x рм
2
2
х y рм у сos
,
Rз
зад arctg
Dг
x
рм
39.
II этап («возврат радийный») включается автоматически при появленииустойчивого сигнала от наземного РМ.
Заданный курс формируется в
зависимости от направления выхода, как азимут одной из 3-х специальных
точек (см. рис. 3):
- А – точка четвертого разворота с координатами Sзад = 21 км; zзад = 0;
- А1, А2 – точки третьего разворота с координатами Sзад = 21 км;
zзад = 2Rp, Rp = 4 км – радиус разворота.
По информации от РМ блок вычисления посадки определяет текущие координаты
самолета в системе координат, связанной с ВПП (S и z) и по ним вычисляется зад
, который поступает в САУ (или КПП) для управления ЛА в боковом канале .
III этап: начинается, когда ЛА подойдет к выбранной точке (А1, А2, А) на
расстояние 4 км. При входе ЛА в 4 км зону точки А, последняя перестает быть
фиксированной и передвигается вместе с самолетом на расстоянии 2,5 км
впереди от него. При этом самолет описывает кривую погони. При входе
самолета в 1,5 км коридор заканчивается третий этап и включается режим
захода на посадку.
40.
41.
14.5 Система директорного управления угловым отклонением отравносигнальной линии курса (СДУ к)
Закон управления командной стрелкой
zСДУ k ( зад ),
z
зад k зк k к k к
к
к
к
зк впп к
СДУ
z
отклонение боковой командной стрелки прибора по сигналу СДУ
k z
передаточный коэффициент по отклонению боковой командной
стрелки, определяющий, на сколько миллиметров должна сместиться
стрелка при отклонении текущего угла крена от заданного на 1°;
k к
передаточный коэффициент по углу крена на изменение курса,
определяющий, какой угол крена должен принять самолет при
возникновении рассогласования по курсу в 1°;
зк рассогласование между курсом ВПП и текущим курсом самолета;
42.
передаточные коэффициенты по углу крена соответственно наугловое отклонение самолета от равносигнальной линии курса и на
скорость этого отклонения, определяющий, какой угол крена должен
принять самолет при возникновении рассогласования по угловому
отклонение и скорости углового отклонения самолета от
равносигнальной линии курса в 1° и в 1 °/сек соответственно.
в
к к
соответственно угловое отклонение и скорость углового
отклонения самолета от равносигнальной линии курса.
43.
Функциональная схема системы директорного управления угловымотклонением от равносигнальной линии курса
Состав системы:
датчик текущего угла крена - гировертикаль ГВ;
датчик текущего курса - курсовая система КС;
задатчик курса ЗК;
датчик отклонения самолета от равносигнальной линии курса - курсовой
радиоприемник КРП;
формирователь рассогласования между курсом ВПП и текущим курсом
самолета - пилотажно-навигационный прибор ПНП;
формирователь командного сигнала - вычислитель системы траекторного
управления ВСТУ;
указатель командного сигнала - пилотажно-командный прибор ПКП.
44.
I кПроцесс выхода самолета на ось ВПП
В точке 1
пилот выставляет рукояткой задатчика
курса на приборе ПНП курс ВПП впп
Прибор ПНП
u зк
зк впп к
В точке 2
Точка уверенного приема сигналов
КРМ (захват глиссады) и появляется
сигнал, I к пропорциональный к
Вычислитель СТУ формирует сигнал u к , складывает
его с сигналом u зк . На основе этих сигналов СТУ
формирует сигнал на КПП u z . Летчик, управляя
самолетом по командной стрелке вводит его в крен.
Сигнал текущего крена с ГВ компенсирует управляющий сигнал с КПП и самолет
входит в разворот (точки 2-3). При этом зк уменьшается, и при равенстве сигналов u к
и u зк командная стрелка КПП отклонится в противоположную сторону. Летчик ,
исполняя команду КПП выведет самолет из крена (точка 3) и дальше полет самолета
происходит по прямой от точки 3 до точки 4.
к
45.
Значение угла подхода подх, с которым самолет приближается к ВПП,выбирается в пределах 28-30°. В точке 4, когда самолет входит в зону линейного
изменения сигнала к сигнал зк отключается
Для устранения колебаний самолета в ЗУ вводится сигнал, пропорциональный
скорости углового отклонения самолета от равносигнальной линии u к
С приближением к оси ВПП знак
u к противоположен знаку u и наоборот.
к
Тогда в точке 4
Сигнал по скорости
u кбудет превышать сигнал u а по знаку ему противоположен.
к
Командная стрелка отклонится вправо, пилот вводит самолет в правый крен,
стрелка восстанавливается в нейтральное положение, самолет выводится из крена.
Постепенно сигналы отклонения и скорости отклонения от курсовой зоны
станут нулевыми и самолет плавно впишется в створ ВПП.
46.
При заходе на посадку с боковым ветром самолет отклоняется от оси ВПП.За счет возникающих при этом сигналов u и u к на командную стрелку
к
выдается команда, выполняя которую, пилот разворачивает самолет в сторону оси
ВПП. В результате возникает отклонение от заданного курса ВПП зк . Когда это
отклонение будет равно углу сноса, самолет прекратит отклонение от оси ВПП и
сигнал u к уравновесится сигналом по курсу. В этом случае пилоту будет выдана
команда на вывод самолета из крена и самолет будет двигаться параллельно оси
ВПП со статической ошибкой, пропорциональной боковой составляющей скорости
ветра. Поэтому целесообразно в зоне небольших углов курса отключать сигнал u зк
Функцию демпфирования угловых колебаний самолета в режиме
директорного управления выполняет система улучшения устойчивости и
управляемости через сервопривод, последовательно подключенный в проводку
управления элеронами.
47.
11.6 Система автоматического управления угловым отклонением отравносигнальной линии курса САУ к
обеспечивает стабилизацию и управление боковым траекторным движением
самолета при заходе на посадку путем воздействия на элероны при возникновении
углового отклонения самолета от равносигнальной линии курса ВПП.
Простейший закон управления элеронами
эСАУ k x k ( зад ),
к
x
зад k зк k к k к
к
к
к
зк впп к
Функциональная схема аналоговой САУ захода на посадку
Включает
• ДУС крена
• вычислитель автопилота
крена ВАПγ
• Элементы СДУ εк (КС, ЗК,
КРП, ПНП, ВСТУγ)
• Сервопривод СПδэ
к
48.
Особенности законов управлениядиректорного захода на посадку .
систем
автоматического
Наиболее целесообразной координатой управления боковым движением самолета
является угол крена. Это объясняется, во-первых, тем, что в этом случае контур
директорного управления содержит интегрирующее звено, во-вторых, тем, что из
условий безопасности полета самолета на значение угла крена накладываются
жесткие ограничения, которые необходимо соблюдать в условиях близости земли.
Поэтому командный сигнал, выдаваемый пилоту на директорный прибор, является
СТ У
функцией заданного значения угла крена зад
Отклонение командной стрелки от среднего положения указывает на
необходимость изменения крена таким образом, чтобы стрелка вернулась в
среднее положение.
k z
выбирают из условий обеспечения максимального удобства пилоту и
ограничения заданных кренов.
Максимальное отклонение командной стрелки на ПКП составляет 20-30 мм.
Допустимые значения углов крена 20-30°. Поэтому обычно выбирают k z =0,5-1,5
мм/°.
Закон управления СДУ
к
с учетом ПФ пилота и СШУ имеет вид:
СДУ
СДУ
W
(
p
)
W
(
p
)
э
п
сшу
z
и
49.
задпропорциональное управление только по сигналу
к
не обеспечивает демпфирование траекторных колебаний самолета относительно
равносигнальной линии курса. Более того, по мере приближения к КРМ период
траекторных колебаний уменьшается и становится сопоставимым с периодом угловых
колебаний по крену. Это приводит к тому, что эффективность траекторного управления
посредством создания крена существенно падает и сам процесс вывода самолета на ось
ВПП становится неустойчивым. Для борьбы с этим явлением, очевидно, необходимо в
закон формирования сигнала заданного крена ввести информацию о скорости углового
отклонения самолета от равносигнальной линии курса к
Вместо информации об угловом отклонении самолета от равносигнальной линии
курса предпочтительным было бы использование сигнала линейного отклонения
z Dкрм tg к Dкрм к
k к
k к
Dкрм D0 Vt
необходимо изменять по мере приближения к ВПП
50.
Первый способ коррекции основывается на ослаблении сигнала, снимаемого с КРМ помере приближения к нему самолета функции дальности
k к f ( Dкрм )
k к f ( Dкрм )
Второй способ коррекции передаточных коэффициентов, основывающийся на
косвенном использовании информации о дальности путем использования
информации о высоте полета.
Коррекция осуществляется непрерывно по сигналам с радиовысотомера или
дискретно через определенные промежутки времени, связанные с моментом
«захвата» глиссады, прохождением маяков и т.д.
Непрерывная коррекция передаточных коэффициентов по дальности или высоте
позволяет обеспечить более точное выдерживание заданной траектории полета.
Однако решение такой задачи имеет определенные технические сложности.
51.
Вследствие разброса крутизны сигнала РТСSi
из-за различной геометрии расположения КРМ относительно ВПП, различной
длины ВПП, влияния эксплуатационных факторов.
Ток на выходе КРП, зависит от
к и
от крутизны
Si (Ii Si к )
При проектировании СТУ принимают некоторую расчетную крутизну
Si расч
Коэффициент, учитывающий отличие фактической крутизны сигнала РТС от
' ''
расчетной:
k s Si / Si расч k s k s
k s'
коэффициент, учитывающий разброс крутизны, вызванный
различиями в длине ВПП и расстоянии от КРМ до ВПП;
=0,6 1,4
k s''
коэффициент, учитывающий разброс крутизны, вызванный
нестабильностью характеристик РТС
0,65 1,35.
52.
Наличие высокочастотной составляющей помехиf
в сигнале
существенно затрудняет процесс пилотирования самолета при заходе на
посадку.
Фильтрация на выходе КРМ и на входе СТУ
зад
kф
Тфp 1
к
[k к к k к к ]
Физического датчика, измеряющего скорость углового отклонения к
на
борту самолета от равносигнальной линии курса не существует, приходится
дифференцировать сигнал к
При этом относительный уровень помех существенно увеличивается.
Необходимо ввести еще один апериодический фильтр с постоянной времени
зад
kф
Тф p 1
[k к к k к
Т ф2 p
Т ф2 p 1
к ]
Тф2
53.
Уменьшив действие высокочастотной составляющей помехи с помощьюфильтров, мы ввели запаздывание в сигнал
зад
Мера по компенсации этого запаздывания - организация операционных
сглаживающих фильтров:
на вход апериодического фильтра помимо полезного сигнала с помехой подать
его производную, то на выходе фильтра мы будем иметь сигнал без временной
задержки и ослабленный сигнал помех :
(u u f )
1
1
1
Tpu
u
uf
Tp 1
Tp 1
Tp 1
54.
На этапе захода на посадку предъявляются очень жесткие требования к точностивыдерживания траектории. Поэтому необходимо обеспечить астатичность
управления по отношению к боковому ветру, возмущающим моментам
Добиться частичного астатизма от действия бокового ветра можно, если
известны угол сноса и скорость ветра. Тогда экипаж вводит в ПНП поправку
к заданному курсу ВПП и тем самым частично компенсирует влияние
бокового ветра
к
зад k к к k к к k ( зк сн )
55.
Цифроаналоговые СДУ и САУФормирование
законов
управления элеронов и рулей
направления
в
режиме
автоматического управления, а также
закона
управления
командным
индексом в режиме директорного
управления
осуществляется
в
цифровом
блоке
вычислителя
управления полетом БВУП.
56.
Можно обеспечить астатизм введением в закон управлениясигнала, пропорционального интегралу углового отклонения от
равносигнальной линии курса
зад
k
к
k к к k к к
к
p
Введение в закон управления положительной обратной связи по
заданному крену
зад k к к k к к k зад зад
57.
Особенностью режимов ДЗП и АЗП в боковом канале является наличие трехвариантов управления:
Первый вариант - без комплексирования информации по сигналам РТС СП/ILS и ИНС
задаваемый угол крена сформирован на основе двух сигналов
к и
( впп )
Второй вариант алгоритма управления в фазе стабилизации самолета на курсовой
линии кроме сигналов
и
используется информация о высоте Н и для
формирования сигнала пропорционального линейному отклонению от оси ВПП z,
а также информация о скорости полета Vx для формирования сигнала,
пропорционального скорости линейного отклонения z
Третий вариант алгоритма управления в качестве информации о боковом
отклонении z использует сигналы A , Dкрм и гл . Сигнал, пропорциональный
z, формируется так же, как во втором варианте алгоритма, сигнал,
пропорциональный ( впп ) также, как в первом варианте.