














 Физика
ФизикаПохожие презентации:





")

")


Приведение системы сил к данному центру
1.
СТАТИКАТема 7. Приведение системы сил к данному центру
2.
7.1. Момент силыВиды момента силы
Различают следующие виды момента силы:
а) векторный момент силы относительно центра;
б) алгебраический момент силы относительно центра;
в) момент силы относительно оси.
Векторный момент силы относительно центра.
Опр. Точку, относительно которой берется момент силы
называют моментной точкой (или центром момента).
Опр. Кротчайшее расстояние от линии действия силы до
моментной точки называется плечом силы - h.
3.
Опр. Векторным моментом силы Fотносительно центра О называется
приложенный в центре О вектор mO (F ),
mO (F )
модуль которого равен произведению
F
модуля силы на ее плечо h и который
А
направлен плоскости, проходящей
через центр О и силу, в ту сторону, откуда
r
О h
сила видна стремящейся повернуть тело
вокруг центра О против хода часовой
стрелки.
| mO ( F ) | | F | h.
Вывод. Векторным моментом силы F относительно центра
О может быть представлен в виде векторного произведения
mO ( F ) r x F .
4.
Алгебраический момент силы относительно точкиl1
l2
Q
Р
Равновесие при
l1 = l2,
Q=P
Если l1 > l2, например, l1 = 2l2 , а Q = P ?
l1
l2
Р
Q
Q
Почему ?
Q · l1 = Q · 2l2 > Р · l2
М(Q) > М(Р)
Равновесие М(Q) = М(Р),
т.е. Q = Р/2.
5.
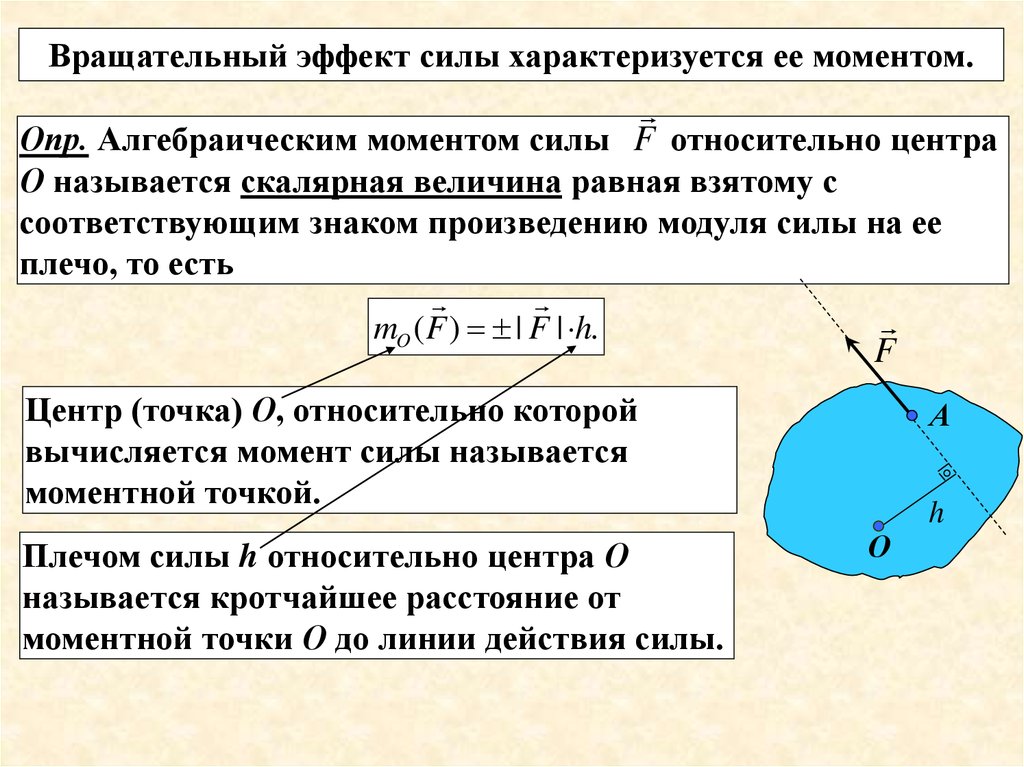
Вращательный эффект силы характеризуется ее моментом.Опр. Алгебраическим моментом силы F относительно центра
О называется скалярная величина равная взятому с
соответствующим знаком произведению модуля силы на ее
плечо, то есть
mO ( F ) | F | h.
F
Центр (точка) О, относительно которой
вычисляется момент силы называется
моментной точкой.
Плечом силы h относительно центра О
называется кротчайшее расстояние от
моментной точки О до линии действия силы.
А
h
О
6.
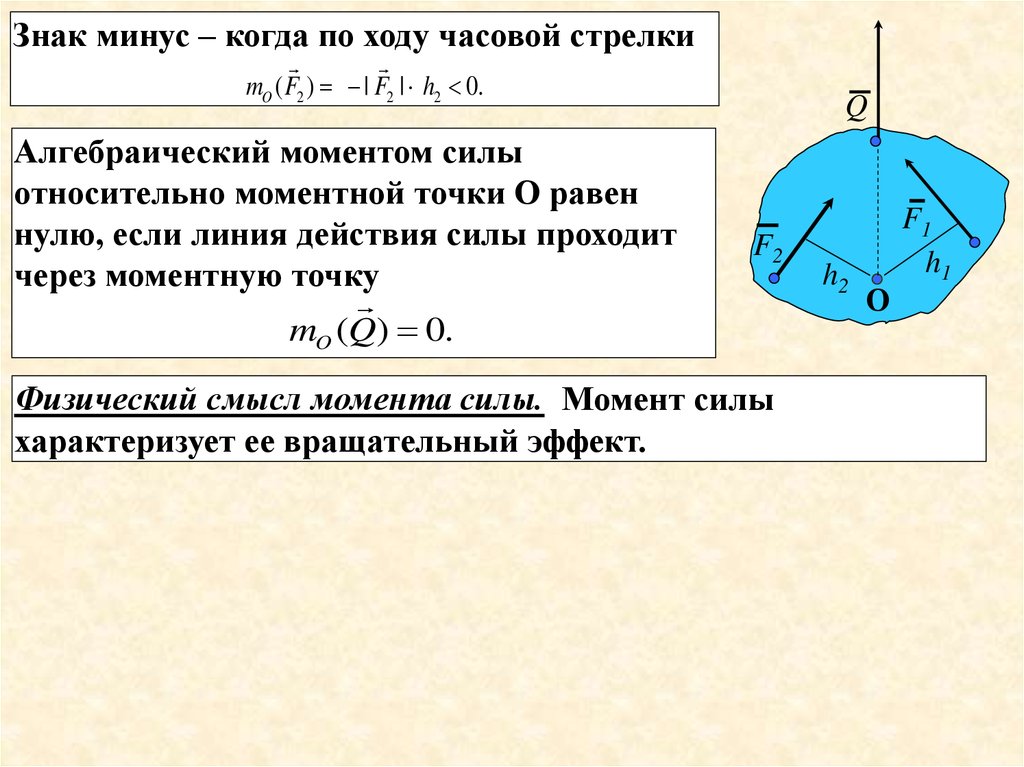
Знак минус – когда по ходу часовой стрелкиmO ( F2 ) | F2 | h2 0.
Алгебраический моментом силы
относительно моментной точки О равен
нулю, если линия действия силы проходит
через моментную точку
mO (Q) 0.
Q
F2
Физический смысл момента силы. Момент силы
характеризует ее вращательный эффект.
h2
О
F1
h1
7.
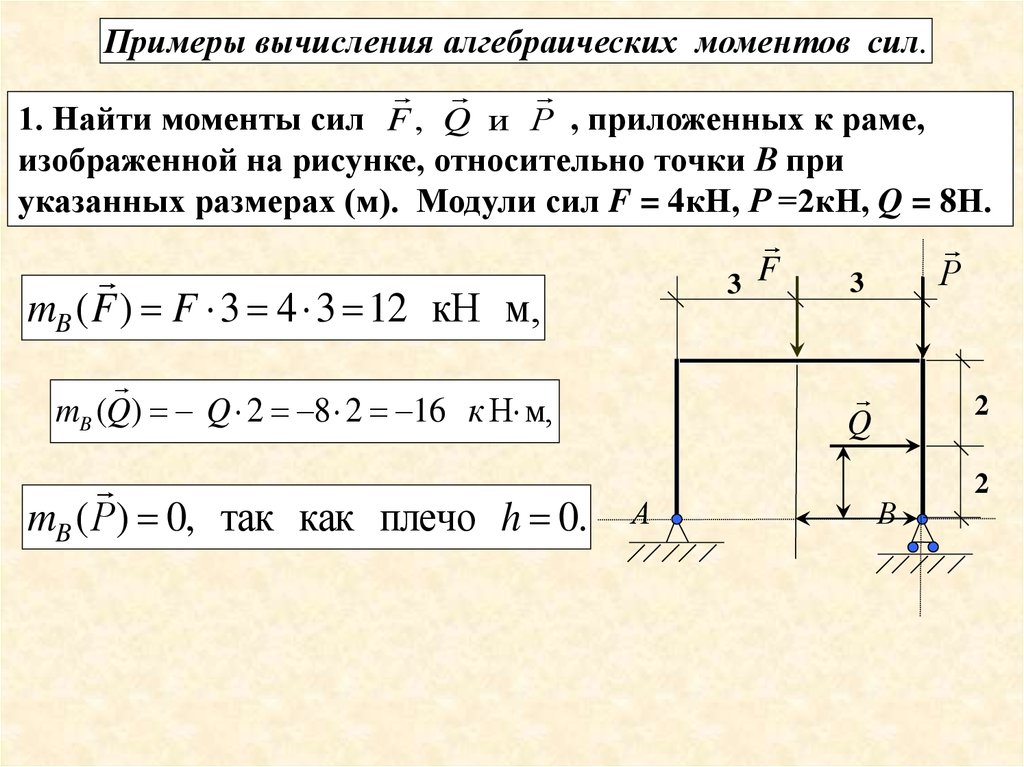
Примеры вычисления алгебраических моментов сил.1. Найти моменты сил F , Q и Р , приложенных к раме,
изображенной на рисунке, относительно точки В при
указанных размерах (м). Модули сил F = 4кН, Р =2кН, Q = 8Н.
mB ( F ) F 3 4 3 12 кН м,
3
mB (Q) Q 2 8 2 16 к Н м,
mB ( Р) 0, так как плечо h 0.
F
Р
3
Q
А
2
В
2
8.
2. Найти момент наклонной силы F , приложенной к балке,относительно точки А.
Размеры (м) указаны на рисунке. F = 5 кН.
mA ( F ) F h,
3
600 0
А
h = 3 sin 600.
F3
600
h
mA ( F ) F 3 sin( 600 ) 5 3 3 / 2 12,99 кН м .
В
9.
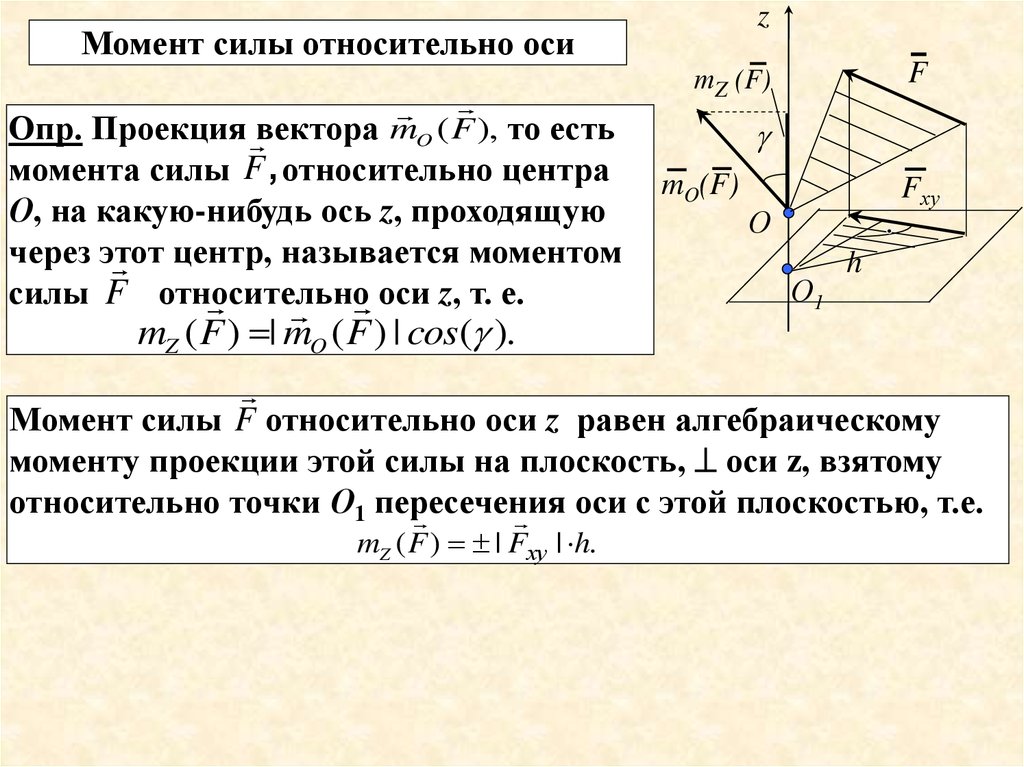
zМомент силы относительно оси
Опр. Проекция вектора mO (F ), то есть
момента силы F , относительно центра
О, на какую-нибудь ось z, проходящую
через этот
центр, называется моментом
силы F относительно
оси z, т. е.
mZ ( F ) | mO ( F ) | cos( ).
F
тZ (F)
mO(F)
Fхуу
О
О1
h
Момент силы F относительно оси z равен алгебраическому
моменту проекции этой силы на плоскость, оси z, взятому
относительно точки О1 пересечения
оси с этой плоскостью, т.е.
mZ ( F ) | Fху | h.
10.
Знак момента силы относительно оси z определяется такжекак и знак алгебраического момента силы.
z
Момент силы относительно оси
равен 0, если сила лежит в одной
плоскости с осью.
F
Q
11.
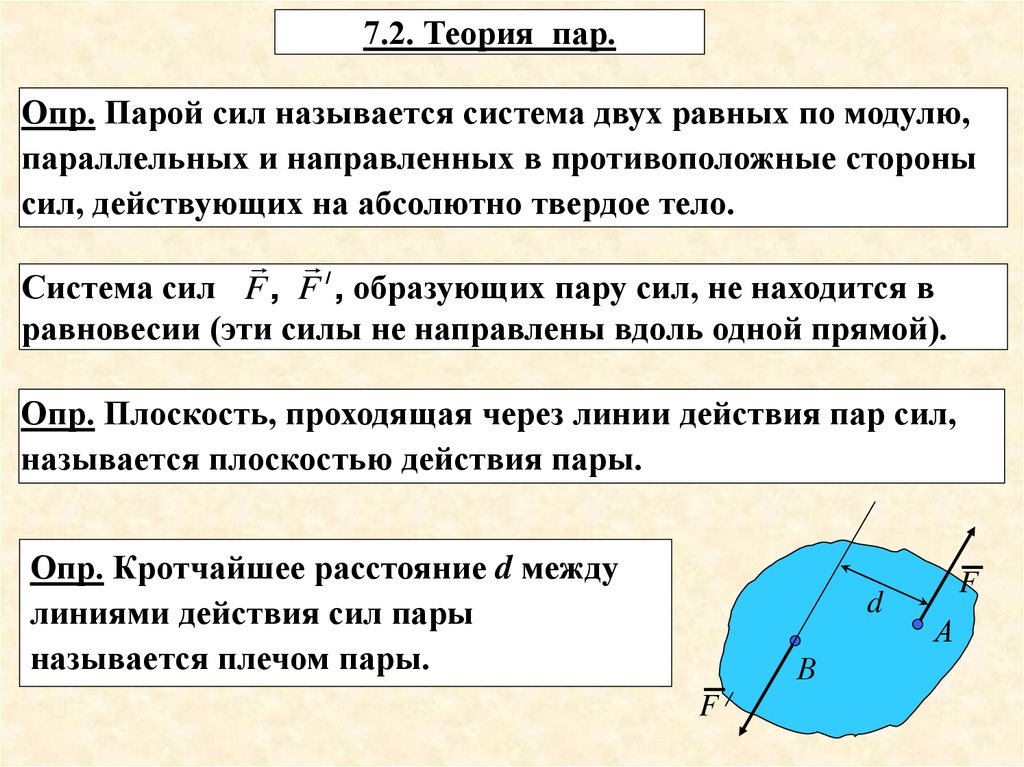
7.2. Теория пар.Опр. Парой сил называется система двух равных по модулю,
параллельных и направленных в противоположные стороны
сил, действующих на абсолютно твердое тело.
/
Система сил F , F , образующих пару сил, не находится в
равновесии (эти силы не направлены вдоль одной прямой).
Опр. Плоскость, проходящая через линии действия пар сил,
называется плоскостью действия пары.
Опр. Кротчайшее расстояние d между
линиями действия сил пары
называется плечом пары.
d
В
F/
F
А
12.
Виды момента пары.Различают следующие два вида моментов пары сил:
а) векторный момент;
б) алгебраический момент.
F
Векторный момент пары.
Опр. Векторным моментом пары сил
называется вектор m, модуль которого равен
произведению модуля одной из сил пары на ее
F/
плечо и который направлен плоскости
действия пары в ту сторону, откуда пара
видна стремящейся повернуть тело против
хода часовой стрелки: т = F d.
d
В
А
т
13.
Выводы:1. Действие пары сил на твердое тело полностью
характеризуется ее векторным моментом.
2. Две пары сил, имеющие одинаковые векторные моменты
эквивалентны.
3. Векторный момент можно приложить в
любой точке , то есть это вектор свободный.
F
d
В дальнейшем на чертеже пару сил будем
изображать ее векторным моментом.
А
В
F/
т
т
т
14.
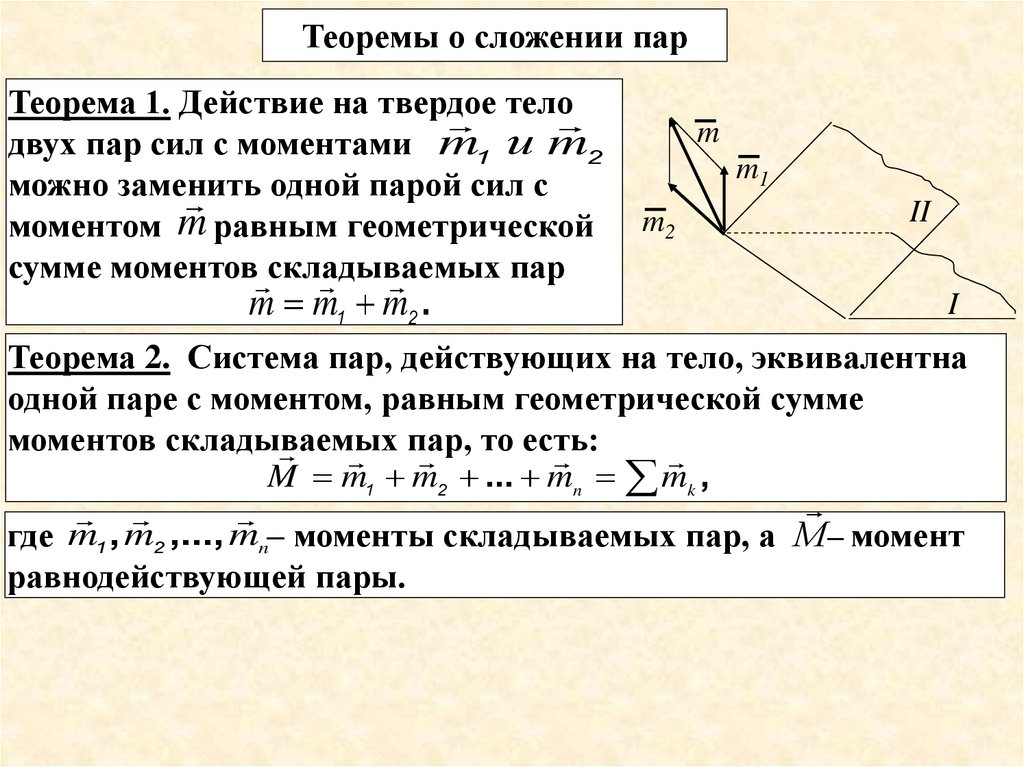
Теоремы о сложении парТеорема 1. Действие на твердое
тело
двух пар сил с моментами m1 и m2
можно заменить
одной парой сил с
моментом m равным геометрической
сумме моментов складываемых
пар
m m1 m2 .
m
m1
m2
II
I
Теорема 2. Система пар, действующих на тело, эквивалентна
одной паре с моментом, равным геометрической сумме
моментов складываемых
пар,
то есть:
M m1 m2 ... mn mk ,
где m1 , m2 ,..., mn– моменты складываемых пар, а М– момент
равнодействующей пары.
15.
Условие равновесия системы парПри равновесии системы пар момент равнодействующей пары
будет равен нулю, то есть
M mk 0.
Это - условие равновесия системы пар.
Алгебраический момент пары
Опр. Алгебраическим моментом пары называется
алгебраическая величина равная взятому с соответствующим
знаком произведение модуля одной из сил пары на ее плечо:
m | F | d F d .
16.
Знак момента пары определяетсятакже как и знак момента
/
силы. Момент пары
/ F , F находится по формуле m1 = F d1 > 0.
Момент пары Р, Р - по формуле m2 = Р d2< 0.
В случае плоской системы сил пары
принято изображать в виде круговой
стрелки с указанием величины момента.
d1
d2
F/
Действие на тело плоской системы пар
эквивалентно одной паре с моментом М
равным алгебраической сумме моментов
складываемых пар, т.е. М =∑mк , а условие
равновесия системы пар имеет вид:
∑ mк = 0.
Р
F
Р/
т1
т2
17.
Теорема о параллельном переносе силыТеорема. Силу, приложенную к твердому телу, можно, не
изменяя оказываемого ею действия, переносить из данной точки
в любую другую точку тела, прибавляя при этом пару с
моментом, равным моменту переносимой силы относительно
точки, куда сила переносится.
Док-во
Пусть на тело действует сила F ,
т
т
приложенная в точке А.
F
/
F
F
/
F
Действие этой силы на тело не
А
А
В
изменится, если в любой точке
В
F //
тела В приложить две
//
/
уравновешенные
/ силы
// F и F ,
такие, что F F , F F .
//
Силы F , F образует пару сил. Её векторный момент: m mB (F ).
18.
7.3. Теорема о приведении системы сил (теорема Пуансо)Теорема. Любая система сил, действующих на абсолютно
твердое тело, при приведении к произвольно выбранному
центру О заменяется одной силой R, приложенной в центре
приведения О, и одной парой с моментом M О , равным главному
моменту системы сил относительно центра О.
Опр. Величина М 0 , равная геометрической сумме моментов
всех сил относительно центра О, называется главным
моментом системы сил, то есть М 0 m0 ( Fk ).
Примечание:
Установлено ранее, что главный вектор системы
сил: R Fk .
19.
Пусть к телу приложены силы: F1 , F2 ,..., Fn .Применим теорему о параллельном переносе сил в точку О.
/ /
/
Заменим «ёжик» сил F1 , F2 ,..., Fn главным вектором R,
а «ёжик» моментов m1 , m2 ,..., mn – главным моментом
М 0 mk .
т2
тn
F1
т1
F1/ А1
О
M0
А2
R
F2
F2/
Аn
О
Fn/
F
n
Замеч. 1. Сила R не является равнодействующей системы сил,
так как заменяет её не одна, а вместе с парой сил.
20.
Замеч. 2. Значениесила R от выбора центра О не зависит.
Значение же М 0 при изменении положения центра может
изменятся.
Следствие. Две системы сил, имеющие одинаковые главные
векторы и главные моменты относительно одного и того же
центра, эквивалентны.
Частные случаи приведения системы сил к центру.
1. Если для данной системы сил R 0, a M 0 0, то она приводится
к одной паре сил с моментом М 0 .
2. Если для данной системы сил R 0, a M 0 0, то она
приводится
к одной силе, то есть к равнодействующей, равной
R и приложенной в центре О.
21.
7.4. Геометрические условия равновесия системы силТеорема о равновесии системы сил.
Для равновесия любой системы сил необходимо и достаточно,
чтобы главный вектор этой системы сил и ее главный момент
относительно любого центра были равны нулю, т.е. чтобы
выполнялись условия
(*)
R 0, M 0 0.
Теорема Вариньона о моменте равнодействующей:
z
Если данная система сил имеет
равнодействующую, то момент
равнодействующей относительно любого
центра О равен сумме моментов сил
системы относительно
того же центра, т.е.
m0 ( R) m0 ( Fk ).
Fn
F2
R
C
О
х
F1
у
22.
Случай двух сил.В случае 2-х сил m0 ( R) m0 ( F1 ) m0 ( F2 ).
Часто теорему применяют при нахождении момента наклонной
силы, так как нахождение плеча в этом случае затруднено.
/
//
Сначала силу F раскладывают на две составляющие F и F .
Модули составляющих
/
F
F / = F · cos 300,
F // = F · sin 300.
3
3
h/
300
F
//
F
2
h
Затем по теореме Вариньона
А
h //
В
/
//
mА ( F ) mА ( F ) mА ( F ) F / h / F // h //
F cos 300 4 F sin 300 3 F (sin 300 3 cos 300 4) 1,96 F .
2