


































 Электроника
ЭлектроникаПохожие презентации:










Принципы работы цифровых терминалов
1.
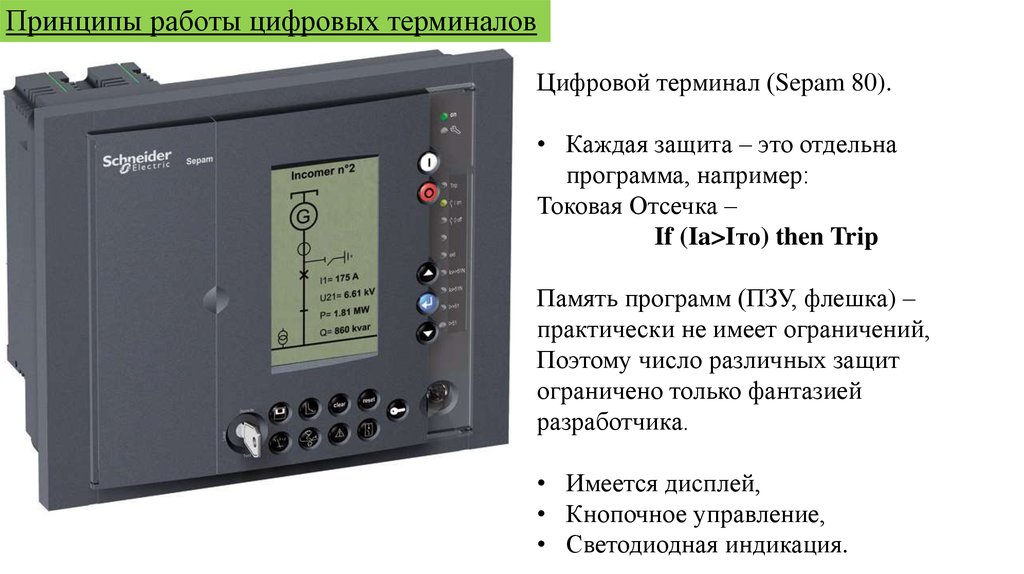
Принципы работы цифровых терминаловЦифровой терминал (Sepam 80).
• Каждая защита – это отдельна
программа, например:
Токовая Отсечка –
If (Ia>Iто) then Trip
Память программ (ПЗУ, флешка) –
практически не имеет ограничений,
Поэтому число различных защит
ограничено только фантазией
разработчика.
• Имеется дисплей,
• Кнопочное управление,
• Светодиодная индикация.
2.
Принципы работы цифровых терминаловАналоговые сигналы
• измерительные трансформаторы тока (1, 5 А)
• и напряжения (100 В),
• Датчики температуры – термосопротивления
(100 Ом при 0 град. Цельсия, Pt, Ni)
3.
Принципы работы цифровых терминаловЛогические сигналы
• управление выключателем,
• датчик оборотов вращающихся машин, магнит и датчик магнитного поля – один импульс
на оборот,
• передача логических сигналов напряжением оперативного питания (220 В)
4.
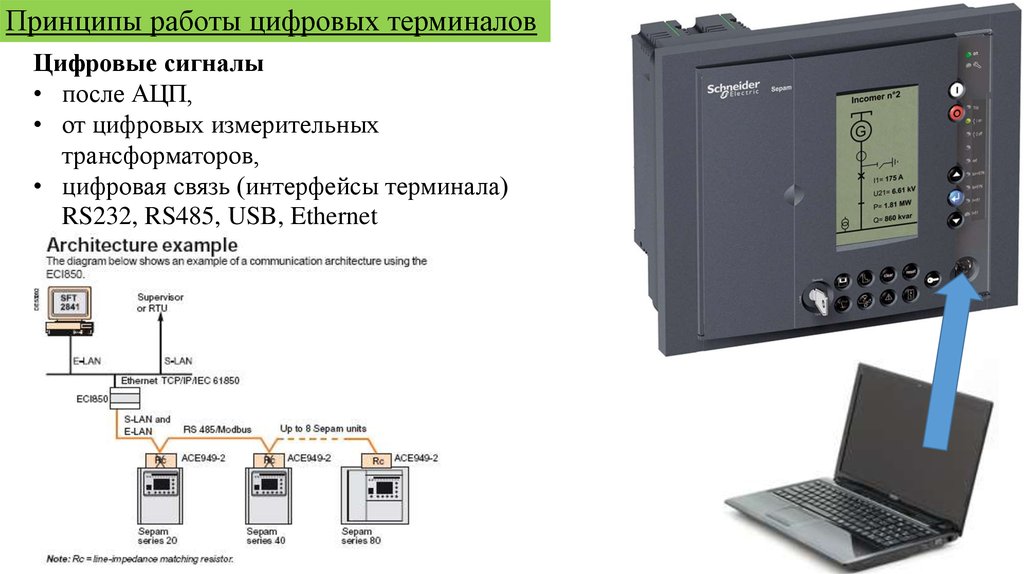
Принципы работы цифровых терминаловЦифровые сигналы
• после АЦП,
• от цифровых измерительных
трансформаторов,
• цифровая связь (интерфейсы терминала)
RS232, RS485, USB, Ethernet
5.
Принципы работы цифровых терминаловподсчет числа защит
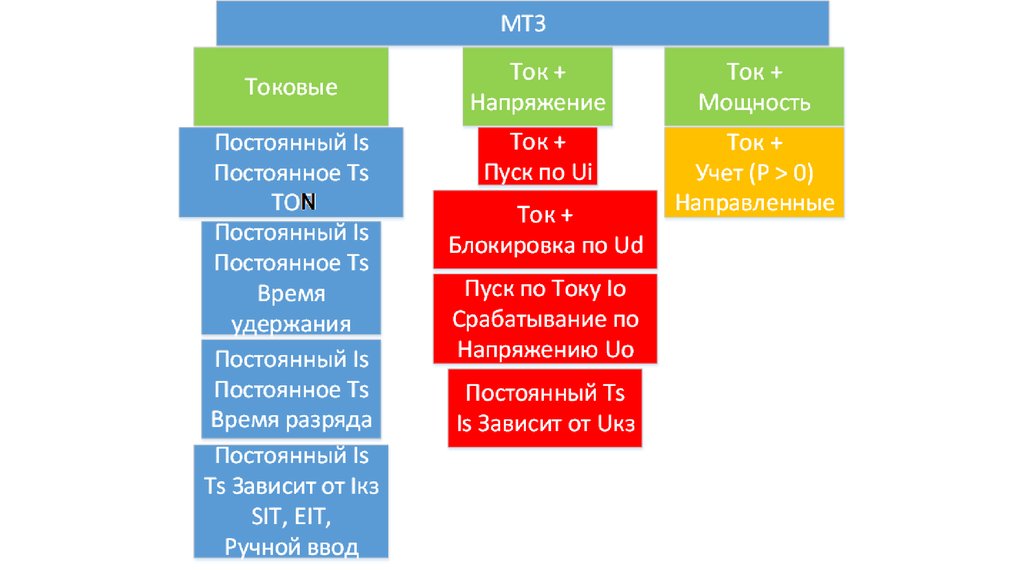
Типы защит
• Максимальные (22)
• минимальные (22)
• Дифференциальные (2 – трансформатор, статор машины),
• Направленные токовые (учет знака мощности) (4),
• токовые с учетом напряжения (1).
расчетные сигналы (12шт)
(на основе физических),
Физические сигналы (10шт)
(от измерительных устройств),
Ia, Ib, Ic, 3Io,
Ua, Ub, Uc, 3Uo
Температура (R)
Обороты машин (логический сигнал)
Id, Ii, Io (Ia, Ib, Ic),
Ud, Ui, Uo (Ua, Ub, Uc)
P, Q, S (U, I)
Частота (U)
Температура (I)
Гармоники (U, I)
Сопротивление (U, I)
6.
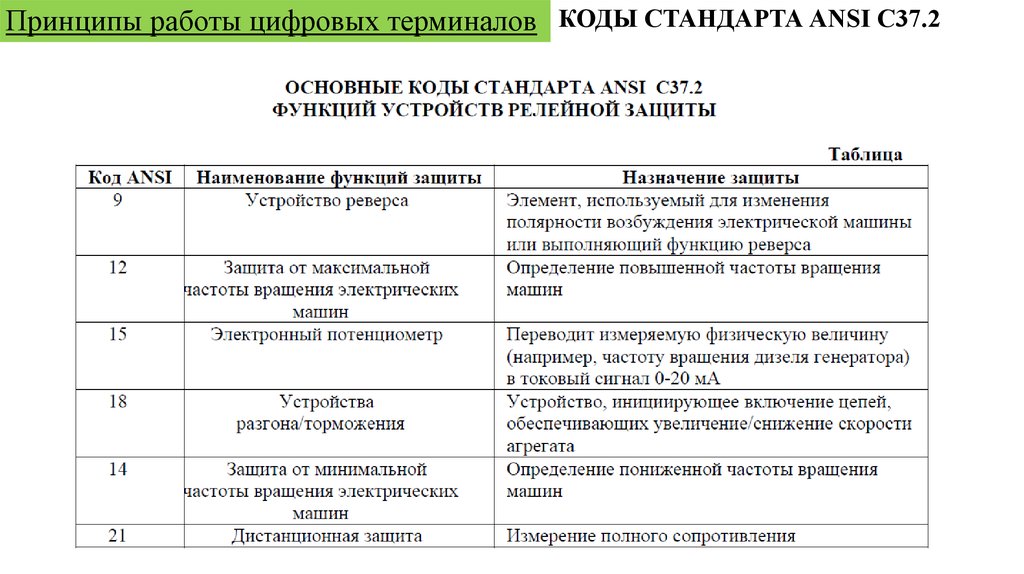
Принципы работы цифровых терминалов КОДЫ СТАНДАРТА ANSI С37.27.
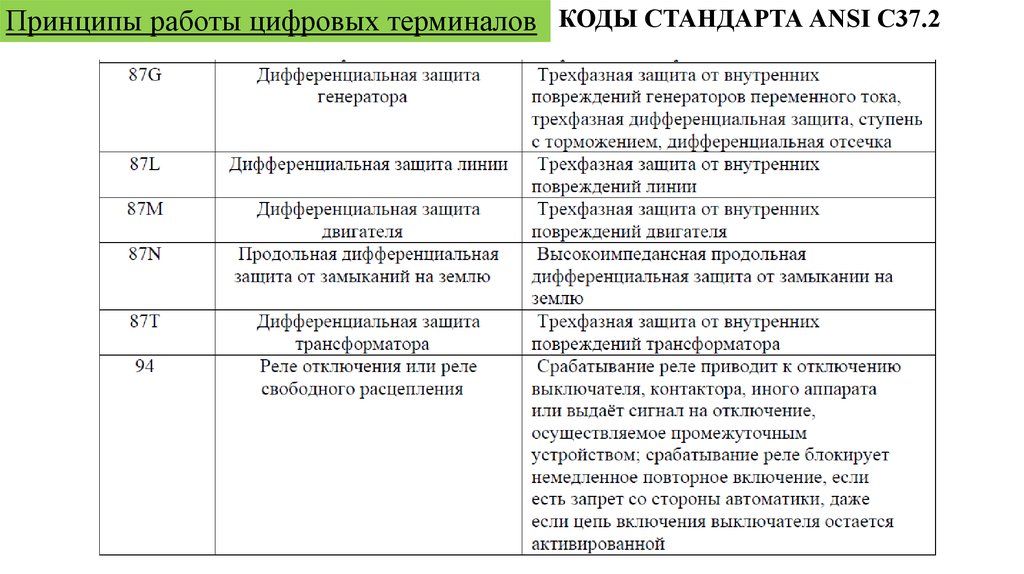
Принципы работы цифровых терминалов КОДЫ СТАНДАРТА ANSI С37.28.
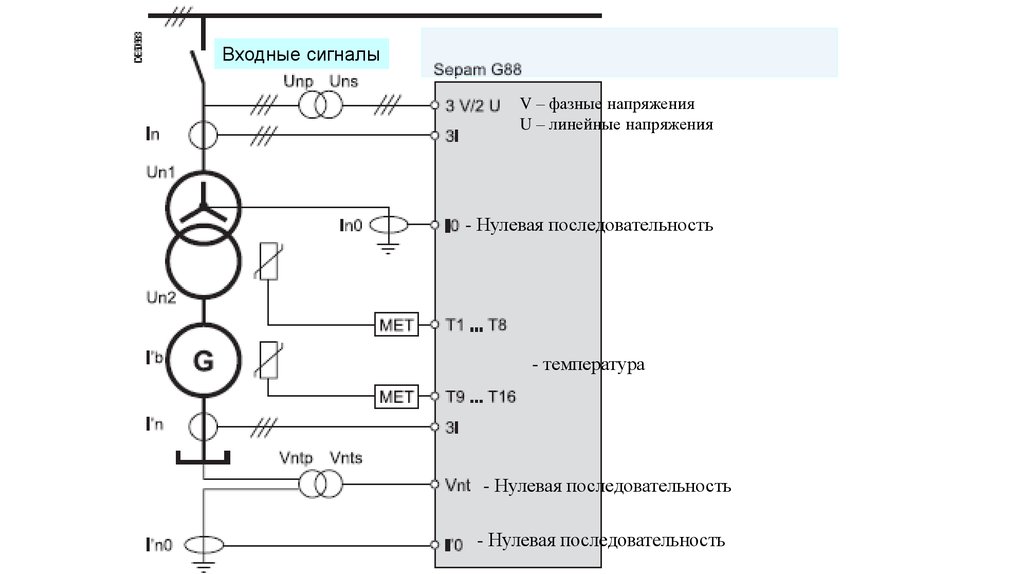
Входные сигналыV – фазные напряжения
U – линейные напряжения
- Нулевая последовательность
- температура
- Нулевая последовательность
- Нулевая последовательность
9.
Разные сигналы – имеют разный характер:•Напряжение,
•Ток,
•Сопротивление (измерение температуры)
Разные сигналы – имеют разную амплитуду:
•100В – измерительный трансформатор напряжения,
•1А, 5А
--------------------------------------------
Для подачи на АЦП (Аналого – Цифровой Преобразователь)
- необходимо преобразовать все сигналы к одному
напряжению
(порядка 5В )
Это делают - Входные преобразователи
10.
Аналоговые сигналыI
1А, 5А
V
*
5Вольт
I0
Аналоговые сигналы
1А, 5А
100В
Аналоговые сигналы
Логические
сигналы
Выходные контакты
I’
Питание
Входные преобразователи
11.
АЦПБазовый блок
Управление
выключателем
Преобразователь
уровней
-Разрешение
на соединение
Логические сигналы
Цифровые линии связи - Настройка блока MCS025
Цифровые сигналы
12.
• Аналоговые сигналы – от измерительныхустройств (ТТ, ТН, …) – (непрерывные в пределах
диапазона)
• Логические сигналы – два состояния – «0» или
«1», (разомкнутый / замкнутый контакт), малый
уровень (<75В)=«0», большой уровень (>88В) = «1»
(зависит от напряжения питания)
• Цифровые сигналы (после АЦП) –
дискретизированные по амплитуде ( U), по
времени ( t)
13.
Спектр входного сигнала:Измеряются •Первая гармоника – 50Гц
•Высшие гармоники (до 13-ой гармоники – 650Гц)
(используются в алгоритмах релейных защит)
Помехи, шумы: Высокие частоты, Выше 650Гц
Входной сигнал
ФНЧ – (0-650Гц)
14.
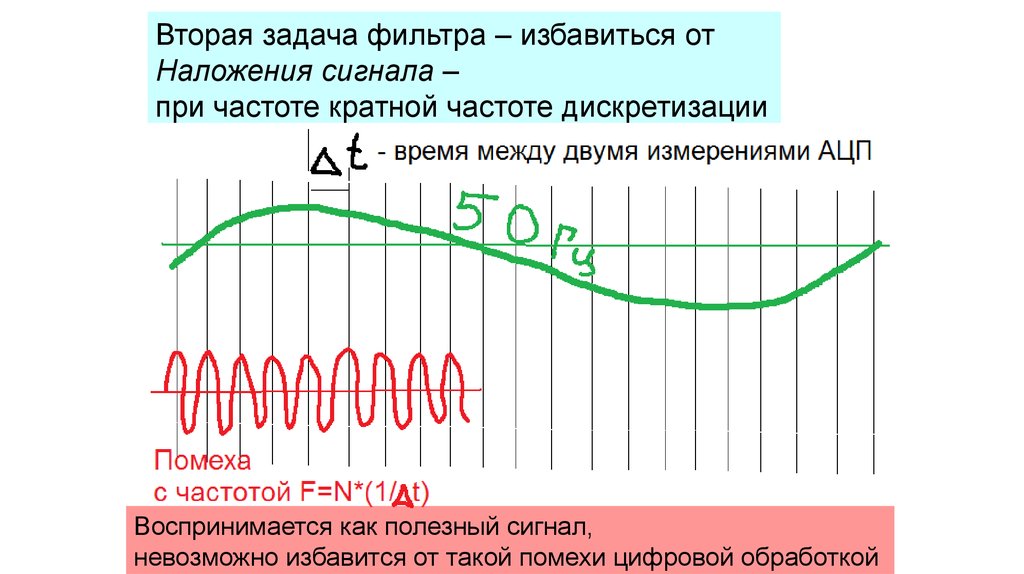
Вторая задача фильтра – избавиться отНаложения сигнала –
при частоте кратной частоте дискретизации
Воспринимается как полезный сигнал,
невозможно избавится от такой помехи цифровой обработкой
15.
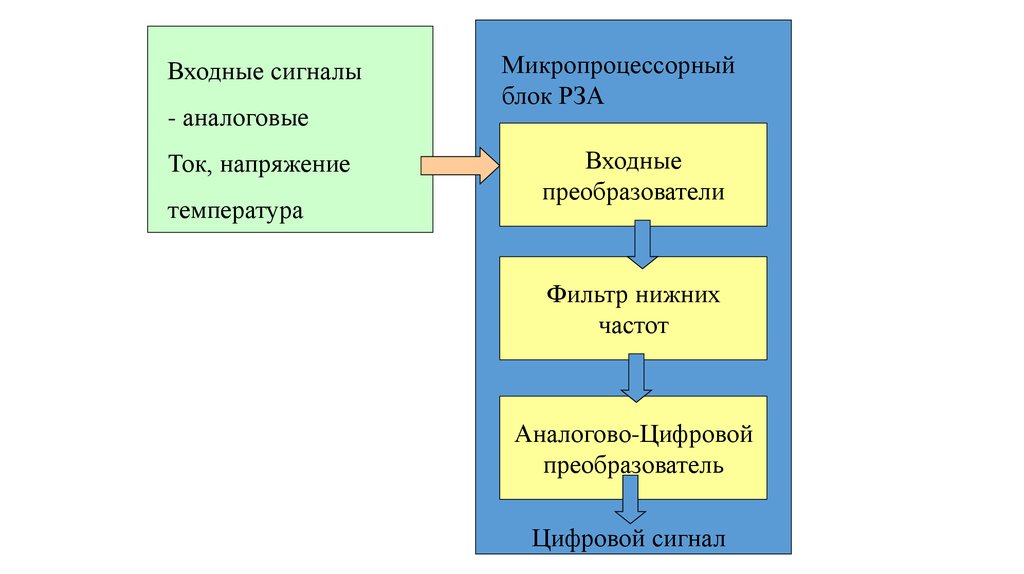
Входные сигналы- аналоговые
Ток, напряжение
температура
Микропроцессорный
блок РЗА
Входные
преобразователи
Фильтр нижних
частот
Аналогово-Цифровой
преобразователь
Цифровой сигнал
16.
Интеллект машин – цифровой:чувства, управление - цифровое
Мир человека Аналоговый мир: воспринимать
(глаза, слух), управлять (руки, голос)
– аналоговые (механические)
сигналы
17.
И между миром человека, аналоговым миром, и мироммашин, цифровым миром
- располагаются преобразователи АЦП и ЦАП.
18.
Любое цифровое устройство имеет одну и ту же структуру:•компьютер (микроконтроллер),
•программа управления,
•между устройством и внешним миром - АЦП и ЦАП
19.
Теоре́ма Коте́льникова(в англоязычной литературе — теорема Найквиста —
Шеннона или теорема отсчётов)
гласит, что, если аналоговый сигнал x(t) имеет конечный
(ограниченный по ширине) спектр, то он может быть
восстановлен однозначно и без потерь по своим отсчётам,
взятым с частотой, строго большей удвоенной верхней
частоты fc
Fотсчетов, частота дискретизации >2*fc
Или – две измеренные точки за период Тс верхней частоты fc
20. Требования к АЦП:
Входной аналоговый сигналU(t)
Ui(i* t)
-Выходной сигнал АЦП
– набор чисел Ui
равные амплитуде
входного сигнала U(t)
в моменты времени i* t
Именно числа Ui обрабатывет
Программа микропроцессорного
Блока защит
• t – шаг дискретизации по времени (число
измерений за период промышленной частоты
50Гц: Т=20mS)
Теорема Котельникова (требуется минимум два измерения за период)
-Для измерения амплитуды ГАРМОНИК – два измерения за период
высшей (13-ой) гармоники – тогда за период первой гармоники (50Гц) –
минимум 26 точек (Sepam – 36 точек за период)
21.
Появился МЭК 61850.шина процесса МЭК 61850-9 -
Теперь оцифрованные выборки (токи и напряжения)
передаются по ней с частотами
80 точек на период (период 50 или 60Гц) для одного
измерения
- "медленный" канал (цифровой поток 80SPC)
или 256 точек (256SPC) - "быстрый".
Т.о. "медленный" канал 50Гц имеет частоту выборки 4 кГц.
почему именно 80 точек на период?
- достаточно для решения задач не только защиты, но и учета
с фиксацией качества электроэнергии (высших гармоник).
для чего 256 точек?
- для мониторинга переходных процессов.
22. Требования к АЦП:
Входной аналоговый сигналUmax ~ 100В
U(t)
U ~ 1В
Ui(i* t) - Выходной сигнал АЦП
8бит – двоичный код
256 уровней (28 = 256),
Т.е. достаточно 8-битного АЦП
Проводящего измерения каждые
(0,5-1)mS
U – шаг дискретизации по амплитуде
(точность измерения амплитуды – 1%)
- Технические измерения
(не для коммерческого учета ЭЭ)
Для входного тока
Перегрузка 40 крат
Тогда требуется
12-14 бит АЦП
Чтобы получить
1% на всем диапазоне
23. Цифро-Аналоговый преобразователь
Аналоговыйвыходной
сигнал
АЛУ
ЦАП
U(t) – для сигнализации (стрелочный индикатор)
- Для управления (пример: Частотный Преобразователь)
АЛУ Выдает цифровой сигнал Ui(i* t)
24.
Из – мер – ениеКорень: МЕРА
Мера (устар.) — синоним для единицы
физической величины, единицы измерения
25.
Измерение - историяВесы - один из древнейших приборов, изобретенных человеком.
Первое упоминание о весах относится ко 2 тысячелетию до нашей эры.
Весы в виде равноплечего коромысла с подвешенными чашками
использовались в Древнем Вавилоне и Египте.
В XII веке арабский ученый аль-Хазини описал сверхточные (для того
времени) весы с чашками, погрешность которых не превышала 0,1%
26.
Измерение – сравнение с эталономУстройство сравнения
Аналог –
Эталон –
Что измеряем
С чем сравниваем
Результат измерения –
Цифровой эквивалент
Аналоговой величины
То есть – процесс измерения – есть Аналого – Цифровое Преобразование
АЦП
27.
Измерение – сравнение с эталономУстройство сравнения
Что измеряем
Эталон
5Кг == 5 эталонных килограмма содержится в
измеряемом грузе
28.
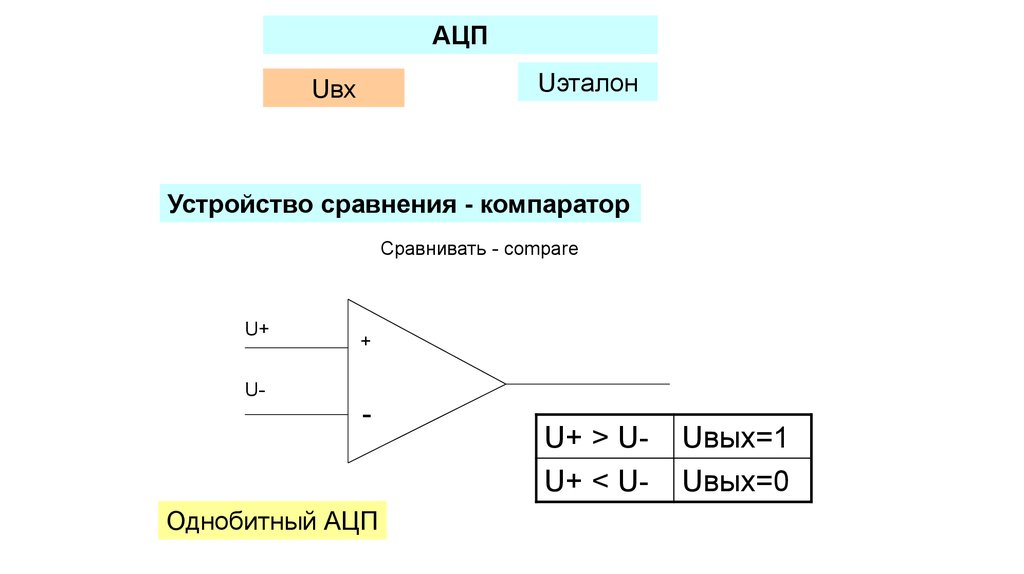
АЦПUэталон
Uвх
Устройство сравнения - компаратор
Сравнивать - compare
U+
+
U-
-
Однобитный АЦП
U+ > UU+ < U-
Uвых=1
Uвых=0
29.
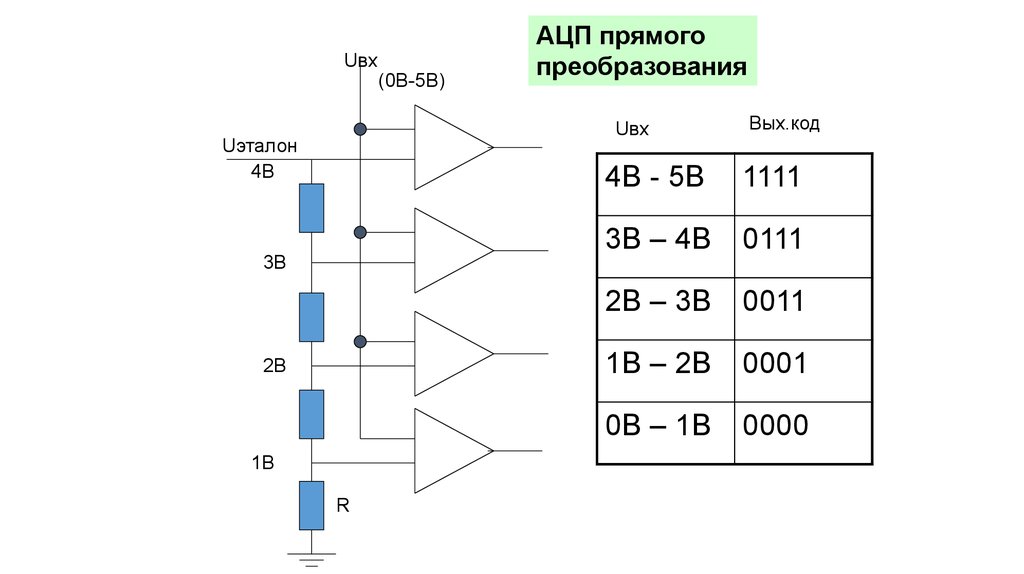
Uвх(0В-5В)
АЦП прямого
преобразования
Uвх
Uэталон
4В
3В
2В
1В
R
Вых.код
4В - 5В
1111
3В – 4В
0111
2В – 3В
0011
1В – 2В
0001
0В – 1В
0000
30.
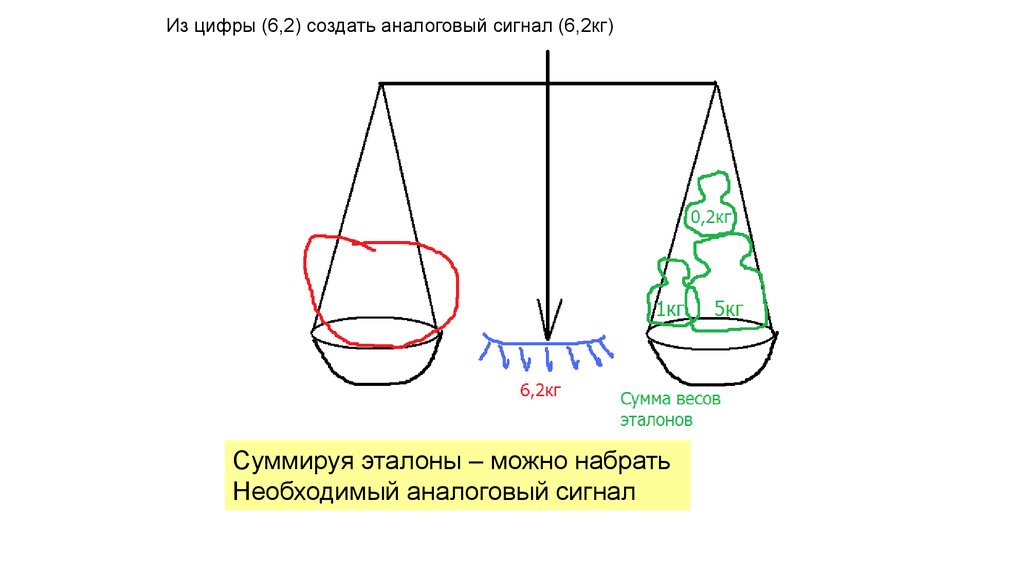
Из цифры (6,2) создать аналоговый сигнал (6,2кг)Суммируя эталоны – можно набрать
Необходимый аналоговый сигнал
31.
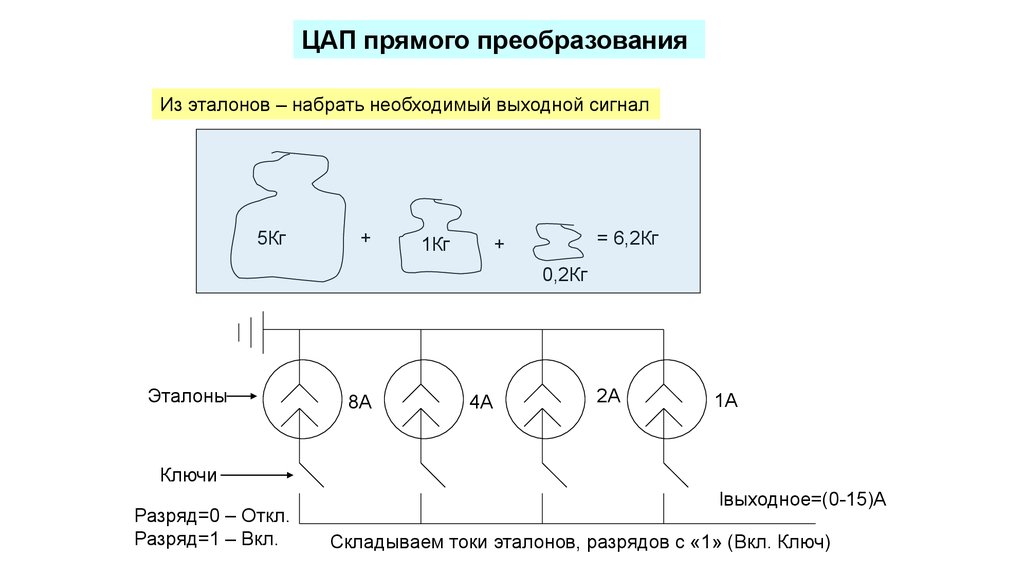
ЦАП прямого преобразованияИз эталонов – набрать необходимый выходной сигнал
5Кг
+
1Кг
= 6,2Кг
+
0,2Кг
Эталоны
8А
4А
2А
1А
Ключи
Разряд=0 – Откл.
Разряд=1 – Вкл.
Iвыходное=(0-15)А
Складываем токи эталонов, разрядов с «1» (Вкл. Ключ)
32.
Итак 4000 лет назад появились первые измерительныеприборы - рычажные весы.
Какие идеи подарили миру эти устройства?
•процесс измерения и эталоны,
•компаратор - устройство для сравнения двух сигналов,
•АЦП прямого преобразования,
•ЦАП прямого преобразования,
•метод последовательных приближений,
•АЦП последовательного приближения,
•двоичная система эталонов (гирьки 1, 2, 4, 8 кг),
•бинарный поиск,
•троичная система эталонов (гирьки 1, 3, 9, 27 кг) и ЦАП с
троичной системой эталонов.
33. Цифровые процессоры:
• Микропроцессор, микроконтроллер- Все элементы (ОЗУ, ПЗУ, АЛУ, АЦП, ЦАП – в одном корпусе)
• Логический контроллер
- Входные, Выходные сигналы – Логические сигналы (управление оборудованием)
• Сигнальный процессор (DSP - Digital Signal Processor)
- Входные, Выходные сигналы – Аналоговые сигналы (обработка аналоговых сигналов: речь, музыка –
телефон, плейер)
34.
Чтотакое
Ia
?
35.
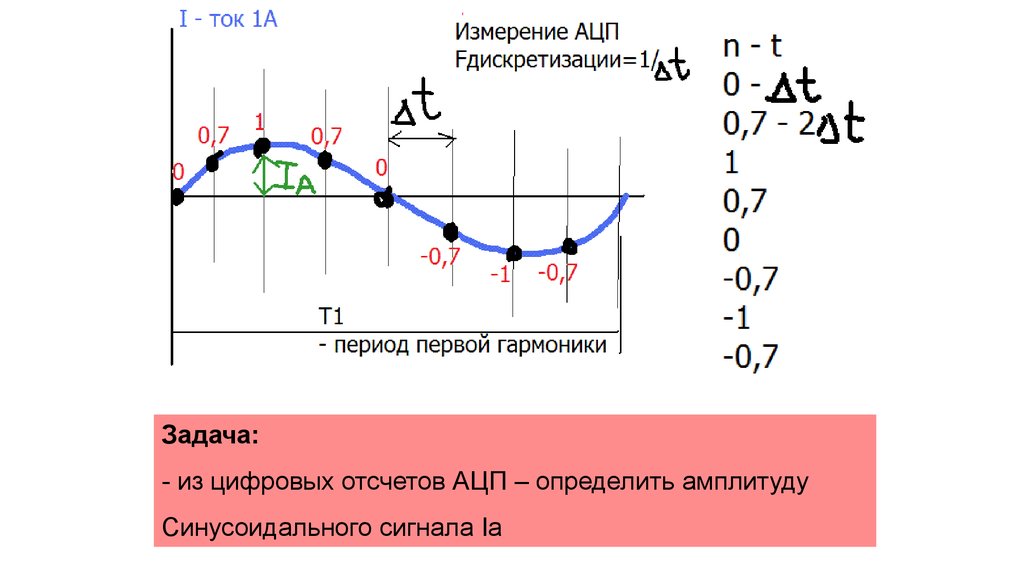
Задача:- из цифровых отсчетов АЦП – определить амплитуду
Синусоидального сигнала Ia
36. Определение амплитуды и фазы синусоидального сигнала
Задача Микропроцессорного блока релейной
защиты: I>Iуставки =>выдать сигнал на
отключение.
1. Измерить I, U (амплитуду первой гармоники U1:
U = U0 + U1*sin( 1*t + φ) – входной сигнал
(+ гармоники – с частотой i=i* 1)
- Основные защиты работают с амплитудами первой гармоники U1
- Тепловые защиты – с учетом всех гармоник
- Некоторые защиты учитывают амплитуды второй, третьей, пятой
гармоники
- Есть защита на основе третьей гармоники
37. Определение амплитуды и фазы синусоидального сигнала
• По (maxUi – minUi)/2Umax
2*U
Umin
Недостатки:
-Используется 2 измеренные точки (из 36 измеренных точек за период)
-Низкая точность, сильное влияние случайных выбросов (шумов)
38.
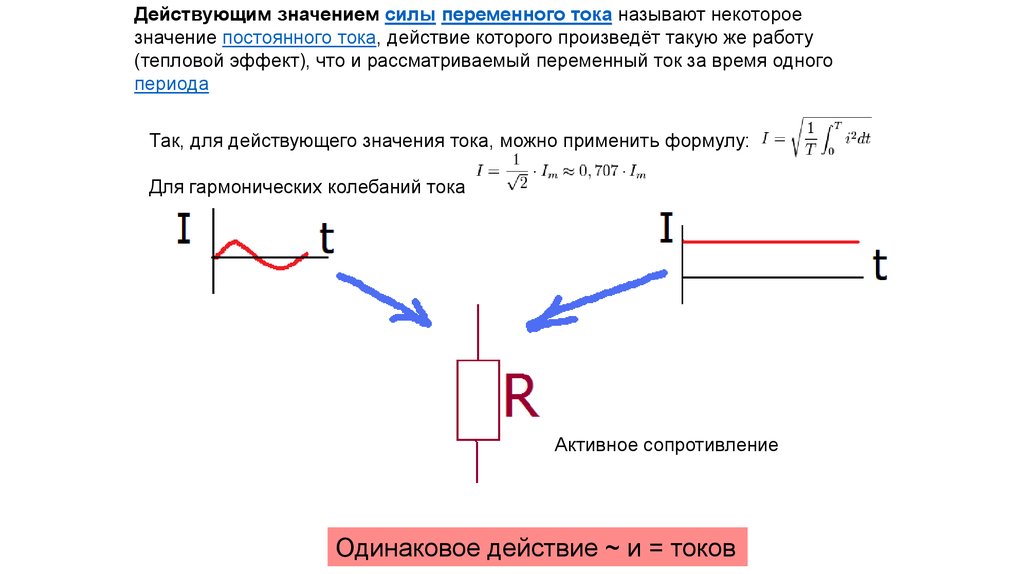
Действующим значением силы переменного тока называют некотороезначение постоянного тока, действие которого произведёт такую же работу
(тепловой эффект), что и рассматриваемый переменный ток за время одного
периода
Так, для действующего значения тока, можно применить формулу:
Для гармонических колебаний тока
Активное сопротивление
Одинаковое действие ~ и = токов
39. Определение амплитуды и фазы синусоидального сигнала
• По амплитуде Действующего значения:Uдейств = U1/
2 = U1/1,41 =
[Интеграл(за период)(U2) /T]
U = U1*sin( 1*t + φ) – входной сигнал
Для цифровых сигналов Интеграл за период – заменяется Суммой за период:
Uдейств =
[Сумма за период{ Ui2 } /N ]
(где N – число измеренных за период точек)
U1 = Uдейств * 1,41 - таким образом определяем амплитуду сигнала
Недостатки:
- Влияние формы сигнала (наличие гармоник) – на точность измерения
(прямоугольные сигналы – другое соотношение).
40. Определение амплитуды и фазы синусоидального сигнала
• По производной входного сигналаU = U1*sin( 1*t + φ) – входной сигнал - Ui
U’ = U1* 1 * cos( 1*t + φ) – производная
входного сигнала – (U(i+1) – Ui)/ t
Если известна частота сигнала 1:
U1 =
(U2 + (U’ / 1 )2 )
Недостатки: точность зависит от формы сигнала (наличия гармоник)
41.
Тригонометрические соотношенияsinA*sinB = (1/2)(cos(A-B) – cos(A+B) )
cosA*cosB = (1/2)(cos(A-B) + cos(A+B) )
sinA*cosB = (1/2)(sin(A-B) + sin(A+B) )
42.
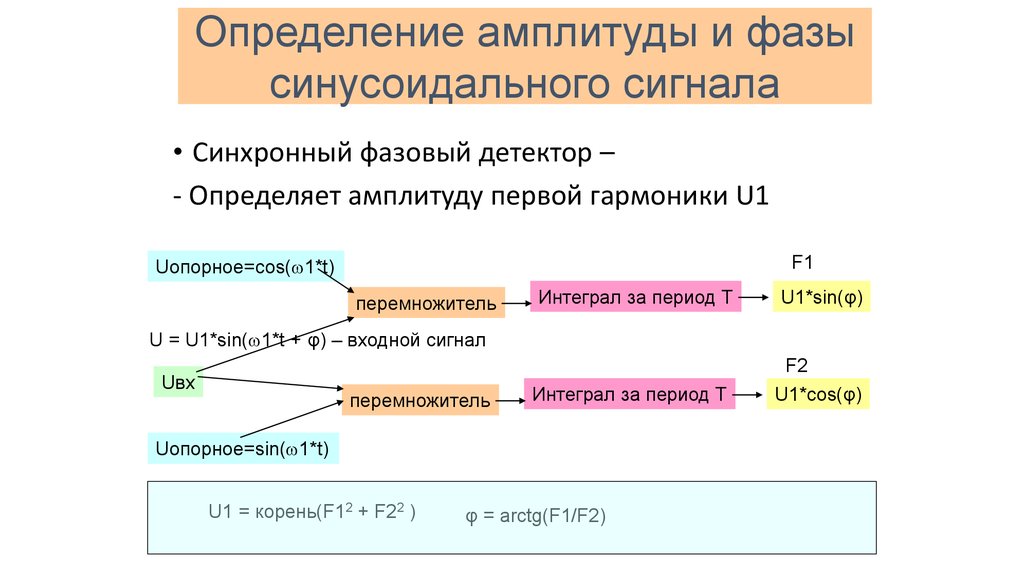
Определение амплитуды и фазысинусоидального сигнала
• Синхронный фазовый детектор –
- Определяет амплитуду первой гармоники U1
F1
Uопорное=cos( 1*t)
перемножитель
Интеграл за период Т
U1*sin(φ)
U = U1*sin( 1*t + φ) – входной сигнал
Uвх
перемножитель
Интеграл за период Т
Uопорное=sin( 1*t)
U1 = корень(F12 + F22 )
φ = arctg(F1/F2)
F2
U1*cos(φ)
43.
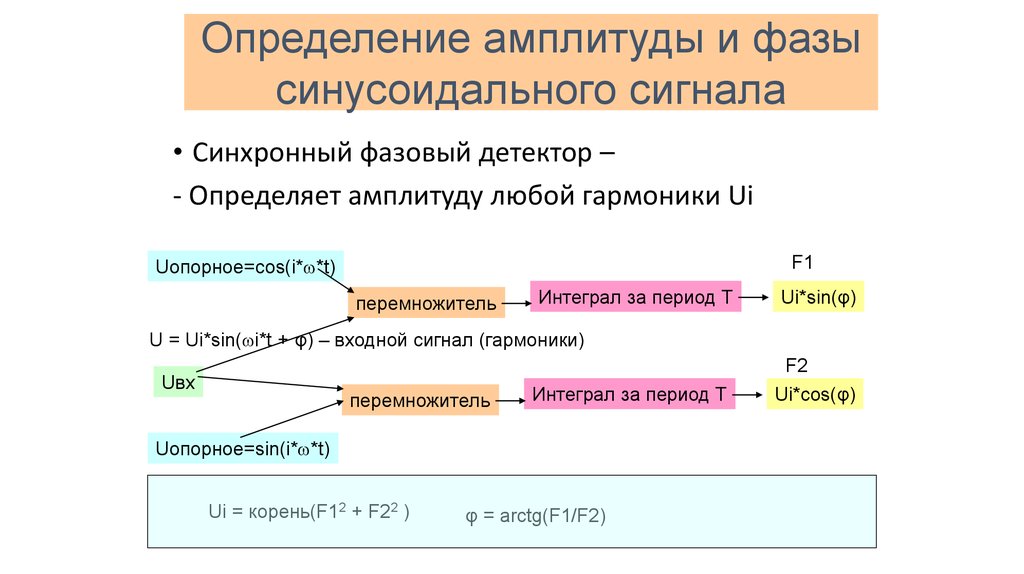
Определение амплитуды и фазысинусоидального сигнала
• Синхронный фазовый детектор –
- Определяет амплитуду любой гармоники Ui
F1
Uопорное=cos(i* *t)
перемножитель
Интеграл за период Т
Ui*sin(φ)
U = Ui*sin( i*t + φ) – входной сигнал (гармоники)
Uвх
перемножитель
Интеграл за период Т
Uопорное=sin(i* *t)
Ui = корень(F12 + F22 )
φ = arctg(F1/F2)
F2
Ui*cos(φ)
44.
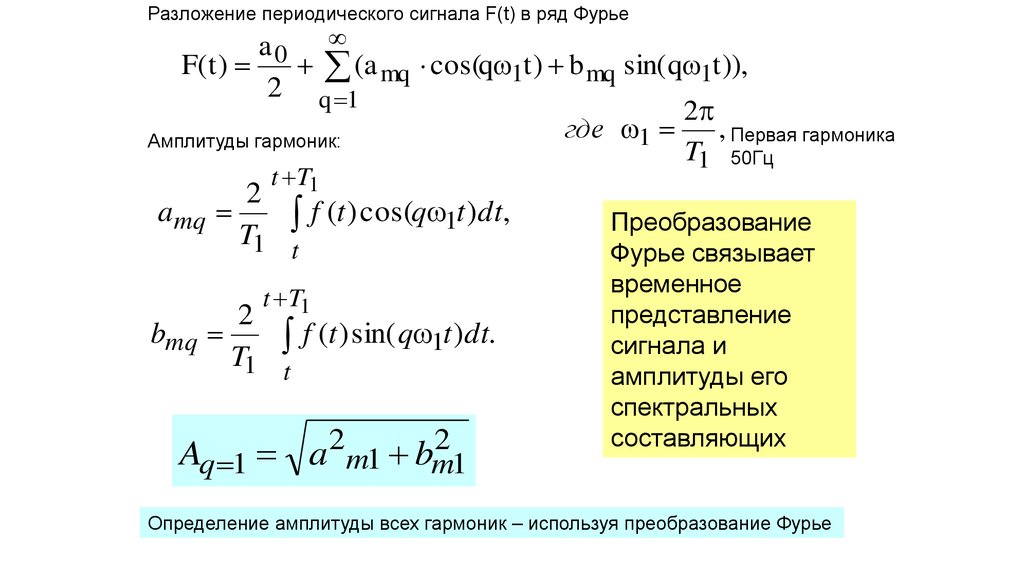
Разложение периодического сигнала F(t) в ряд Фурьеa0
F( t )
(a mq cos(q 1t ) b mq sin( q 1t )),
2 q 1
2
где 1
, Первая гармоника
Амплитуды гармоник:
T1 50Гц
t T1
2
amq
f (t ) cos(q 1t )dt,
Преобразование
T1 t
t T1
2
bmq
f (t ) sin( q 1t )dt.
T1 t
2
Aq 1 a 2m1 bm
1
Фурье связывает
временное
представление
сигнала и
амплитуды его
спектральных
составляющих
Определение амплитуды всех гармоник – используя преобразование Фурье
45.
Рассмотрим некоторые закономерности, вытекающие из (3, 4):Симметричные (относительно центра периода Т) сигналы будут иметь только an
отличные от нуля, все bn будут равны 0. Соответственно ассиметричные сигналы
будут иметь только bn отличные от нуля.
Сигнал с одной частотой sin(n∙ ∙t + ), но с разными фазами – будет иметь
разные комбинации an, bn одной гармоники n:
при =0 – ( + bn )
при =90 – ( an )
при =180 – ( - bn )
при =270 – (-an )
Чем более резкие изменения амплитуды сигнала во времени, тем более широкий
спектр (гармоники с большими номерами n) имеет данный сигнал (и наоборот).
Ширина спектра - ΔF~1/ Δt – длительность прямоугольного импульса
46.
Принципы работы цифровых терминаловПервая программная реализация алгоритма БПФ была осуществлена в начале 60-х
годов XX века Джоном Кули в вычислительном центре IBM под руководством тески
Джона Тьюки, а в 1965 году ими же была опубликована статья, посвященная
алгоритму быстрого преобразования Фурье.
Вычислительная сложность алгоритма Дискретное ПФ составляет N*N комплексных
умножений и сложений. (N – длина выборки, если производим ДПФ за один период –
то N=36 точек)
Для быстрого преобразования Фурье вычислительная сложность алгоритма
Дискретное ПФ составляет 2N, то есть для 36 точек – в 18 раз быстрее ДПФ
47.
Принципы работы цифровых терминаловОпределение частоты синусоидального сигнала
Скорость изменения частоты в
системе определяется
(стабилизируется) всеми
вращающимися машинами
(генераторы, двигатели).
Поэтому частота не может
изменяться быстро.
Постоянная времени частоты
Тч ~ 7 секунд
характеристика периодического процесса,
равна количеству повторений (периодов) или
возникновения событий (процессов) в единицу
времени.
1 Гц = 1 период / в одну секунду
При уменьшении частоты:
1. Генераторы – увеличивают выработку ЭЭ
2. Синхронные моторы – переходят в режим
генерации
3. Асинхронные двигатели – уменьшают
потребление
48.
Принципы работы цифровых терминаловОпределение частоты синусоидального сигнала
Прямой метод – подсчет числа периодов за время
измерения – определение перехода через «ноль»
для получения точности 0,01 Гц – требуется 100 секунд
49.
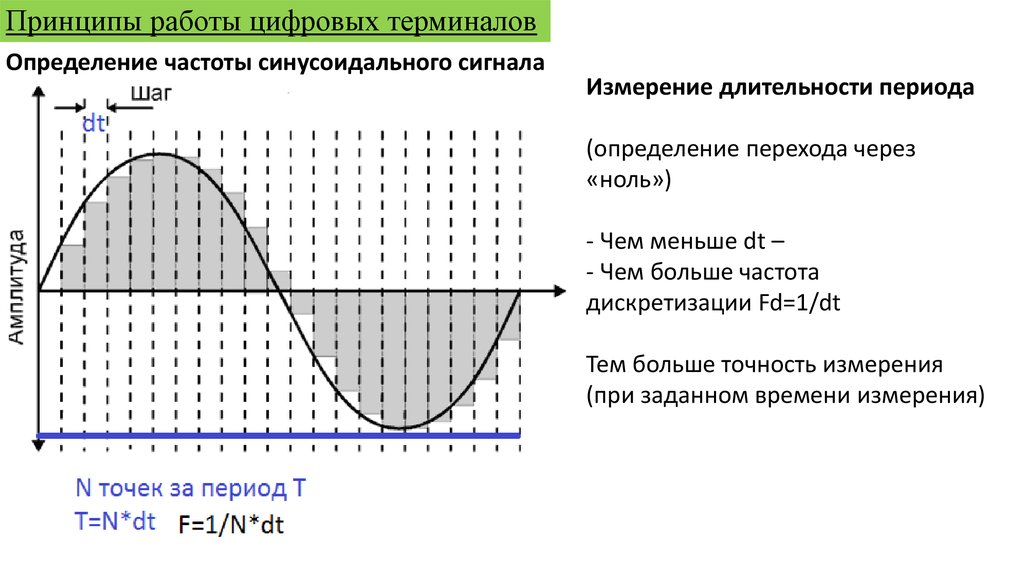
Принципы работы цифровых терминаловОпределение частоты синусоидального сигнала
Измерение длительности периода
(определение перехода через
«ноль»)
- Чем меньше dt –
- Чем больше частота
дискретизации Fd=1/dt
Тем больше точность измерения
(при заданном времени измерения)
50.
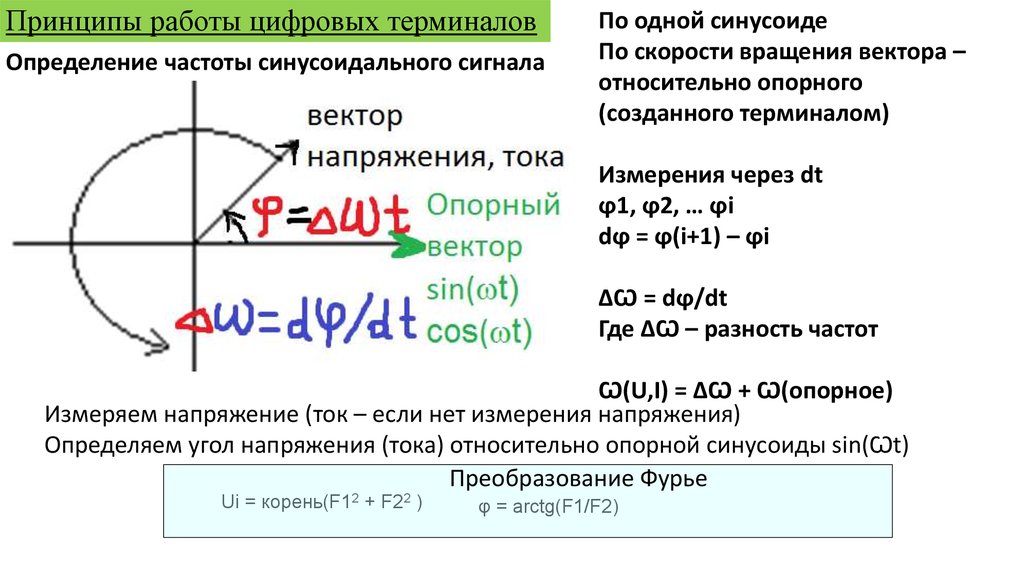
Принципы работы цифровых терминаловОпределение частоты синусоидального сигнала
По одной синусоиде
По скорости вращения вектора –
относительно опорного
(созданного терминалом)
Измерения через dt
ϕ1, ϕ2, … ϕi
dϕ = ϕ(i+1) – ϕi
ΔѠ = dϕ/dt
Где ΔѠ – разность частот
Ѡ(U,I) = ΔѠ + Ѡ(опорное)
Измеряем напряжение (ток – если нет измерения напряжения)
Определяем угол напряжения (тока) относительно опорной синусоиды sin(Ѡt)
Преобразование Фурье
Ui = корень(F12 + F22 )
φ = arctg(F1/F2)
51.
Принципы работы цифровых терминаловПо скорости вращения вектора
Определение частоты синусоидального сигнала
Получение вектора Н:
Суммируем проекции векторов Ua(t), Ub(t), Uc(t)
На оси X, Y
Получаем компоненты Hx(t), Hy(t)
Вектора Н
Поля H (6),
создаваемого тремя фазами
(1, 2, 3)
Напряжения Ua, Ub, Uc
Или тока Ia, Ib, Ic
В качестве опорного сигнала – внутренние часы
Терминала (время t)
52.
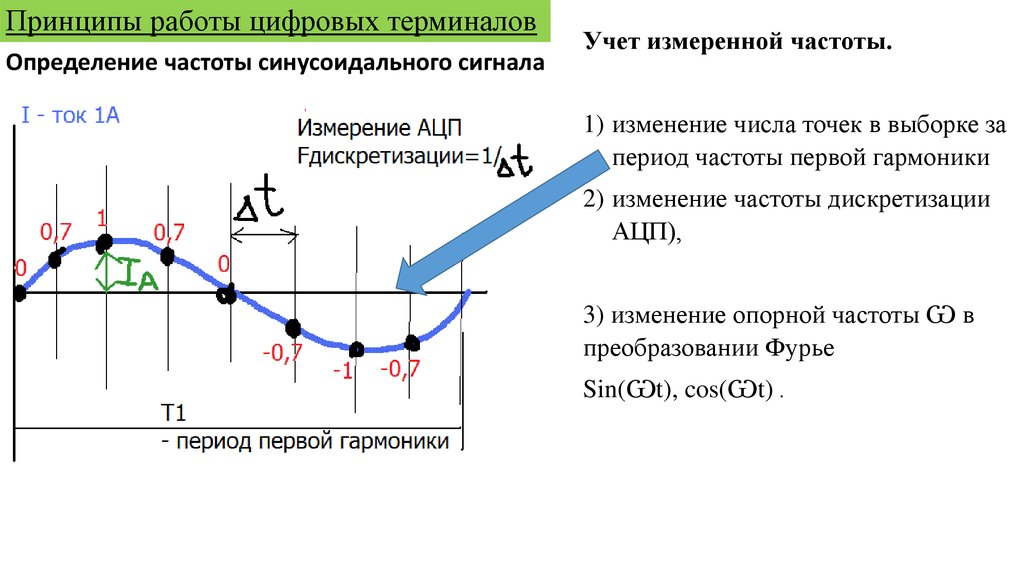
Принципы работы цифровых терминаловОпределение частоты синусоидального сигнала
Учет измеренной частоты.
1) изменение числа точек в выборке за
период частоты первой гармоники
2) изменение частоты дискретизации
АЦП),
3) изменение опорной частоты Ѡ в
преобразовании Фурье
Sin(Ѡt), cos(Ѡt) .
53.
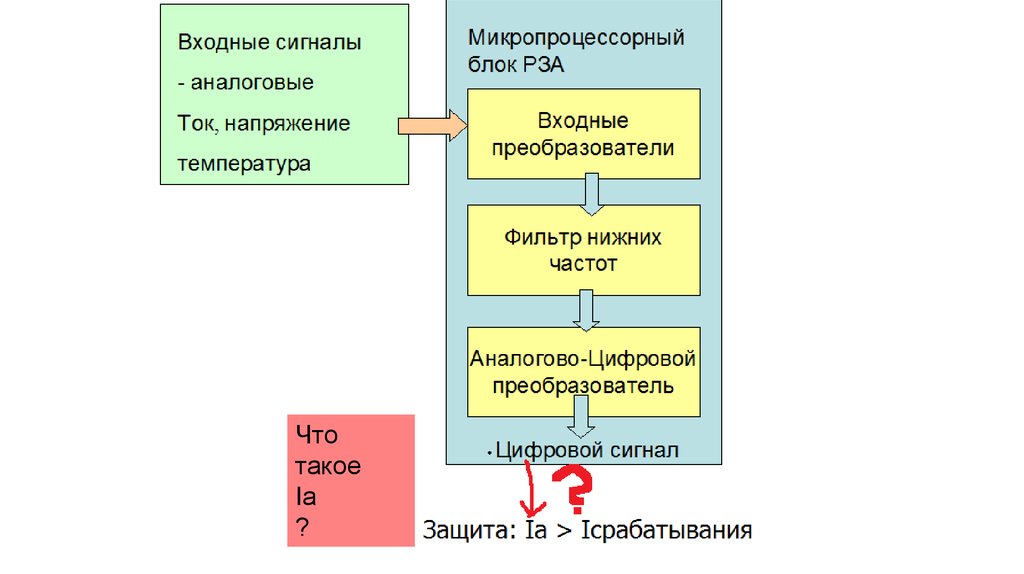
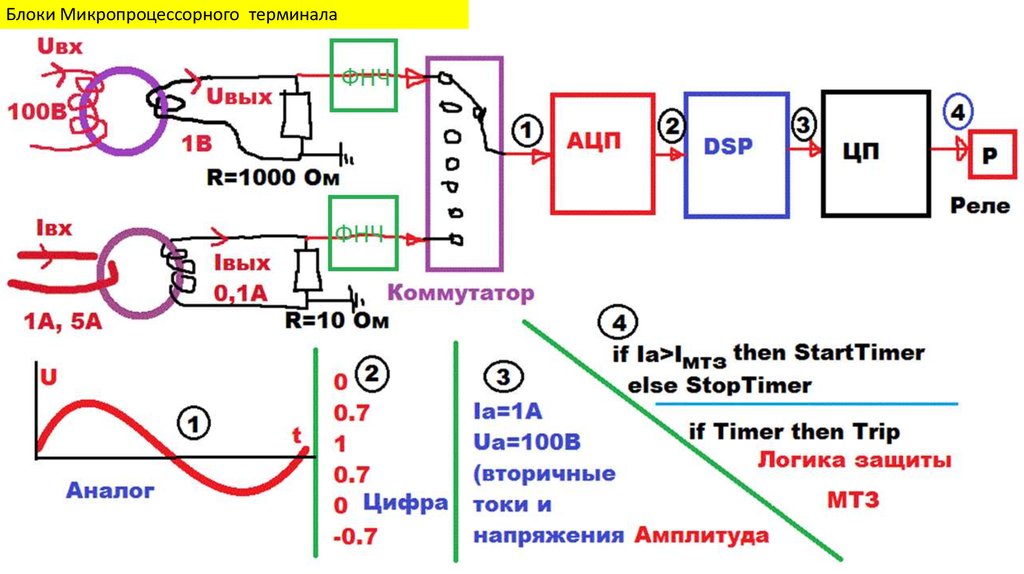
Принципы работы цифровых терминаловВходные сигналы
- аналоговые
Ток, напряжение
температура
Микропроцессорный
блок РЗА
Входные
преобразователи
Фильтр нижних
частот
Аналогово-Цифровой
преобразователь
Цифровой сигнал
Определение
Амплитуды
И фазы
Определение
Частоты
(коррекция)
Работа защит
МТЗ, дистанционной
дифференциальной
54.
Блоки Микропроцессорного терминала55.
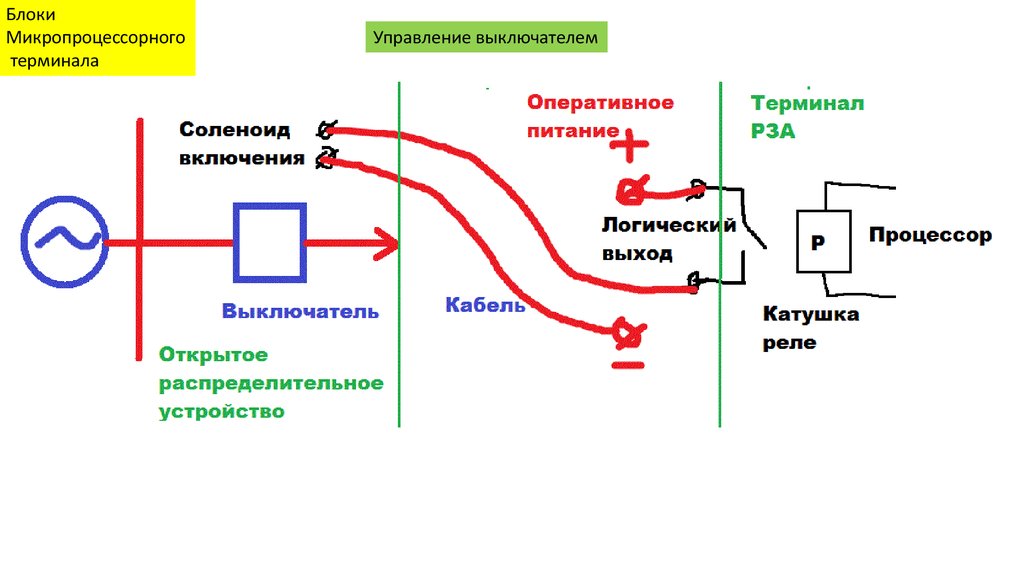
БлокиМикропроцессорного
терминала
Управление выключателем
56.
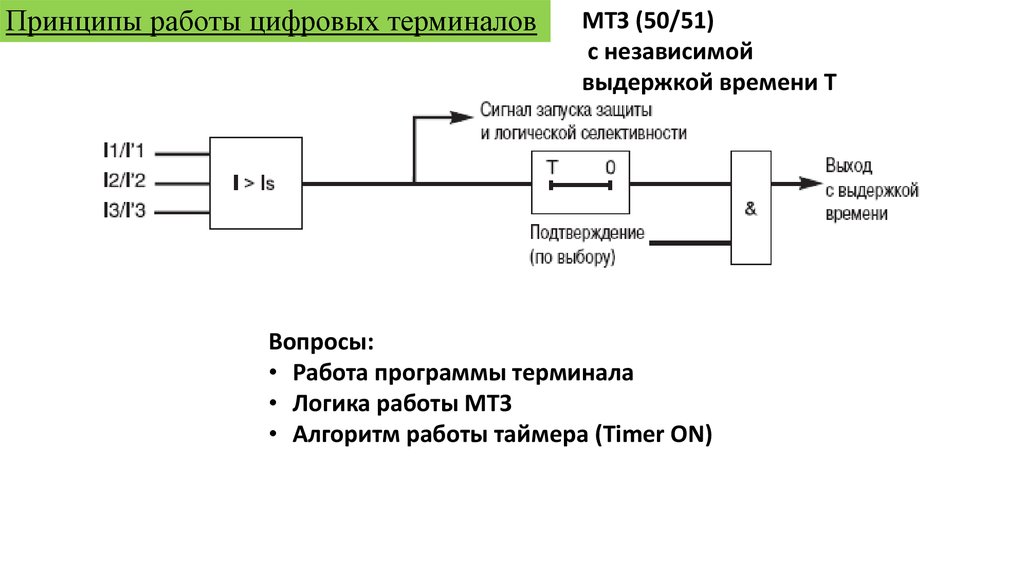
Принципы работы цифровых терминаловМТЗ (50/51)
с независимой
выдержкой времени Т
Вопросы:
• Работа программы терминала
• Логика работы МТЗ
• Алгоритм работы таймера (Timer ON)
57.
• Работа программы терминалаРежим реального времени, постоянный цикл терминала Тц
58.
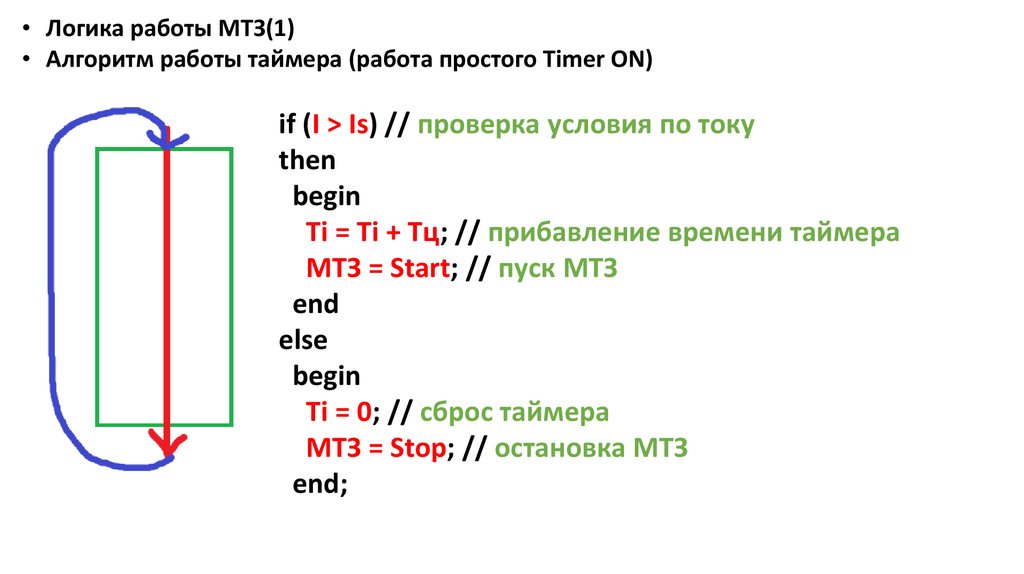
• Логика работы МТЗ(1)• Алгоритм работы таймера (работа простого Timer ON)
if (I > Is) // проверка условия по току
then
begin
Ti = Ti + Tц; // прибавление времени таймера
МТЗ = Start; // пуск МТЗ
end
else
begin
Ti = 0; // сброс таймера
МТЗ = Stop; // остановка МТЗ
end;
59.
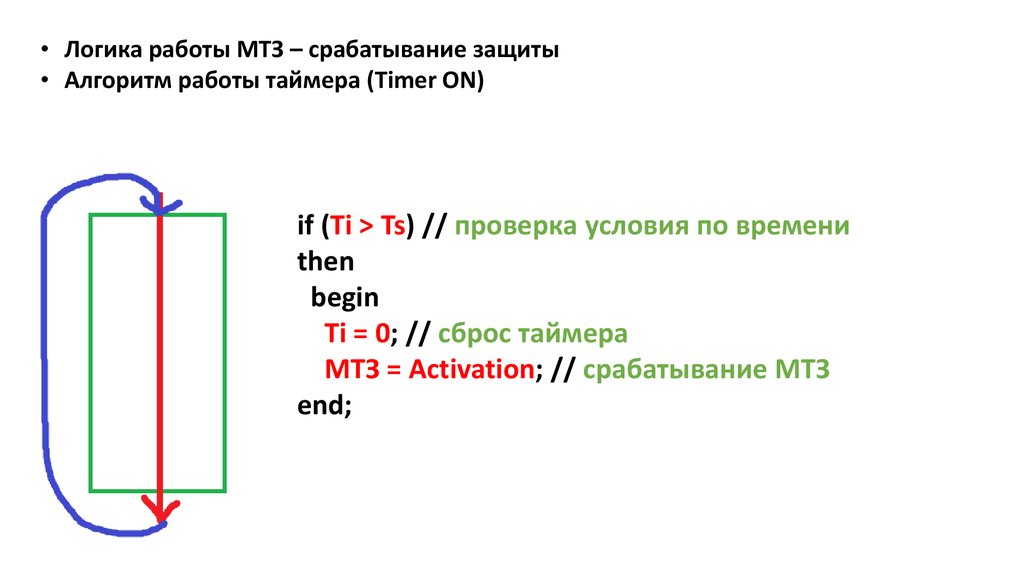
• Логика работы МТЗ – срабатывание защиты• Алгоритм работы таймера (Timer ON)
if (Ti > Ts) // проверка условия по времени
then
begin
Ti = 0; // сброс таймера
МТЗ = Activation; // срабатывание МТЗ
end;
60.
Для повторяющихся замыканий:Таймер удержания –
- реле времени
не сбрасывает накопленную выдержку времени
В течении «Времени удержания»
61.
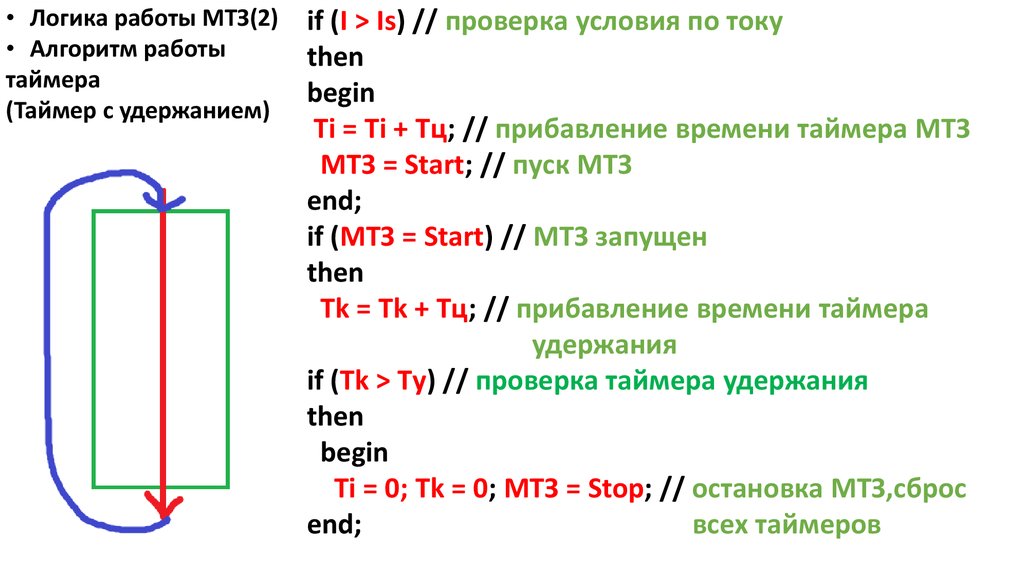
• Логика работы МТЗ(2)• Алгоритм работы
таймера
(Таймер с удержанием)
if (I > Is) // проверка условия по току
then
begin
Ti = Ti + Tц; // прибавление времени таймера МТЗ
МТЗ = Start; // пуск МТЗ
end;
if (МТЗ = Start) // МТЗ запущен
then
Tk = Тk + Tц; // прибавление времени таймера
удержания
if (Tk > Tу) // проверка таймера удержания
then
begin
Ti = 0; Tk = 0; МТЗ = Stop; // остановка МТЗ,сброс
end;
всех таймеров
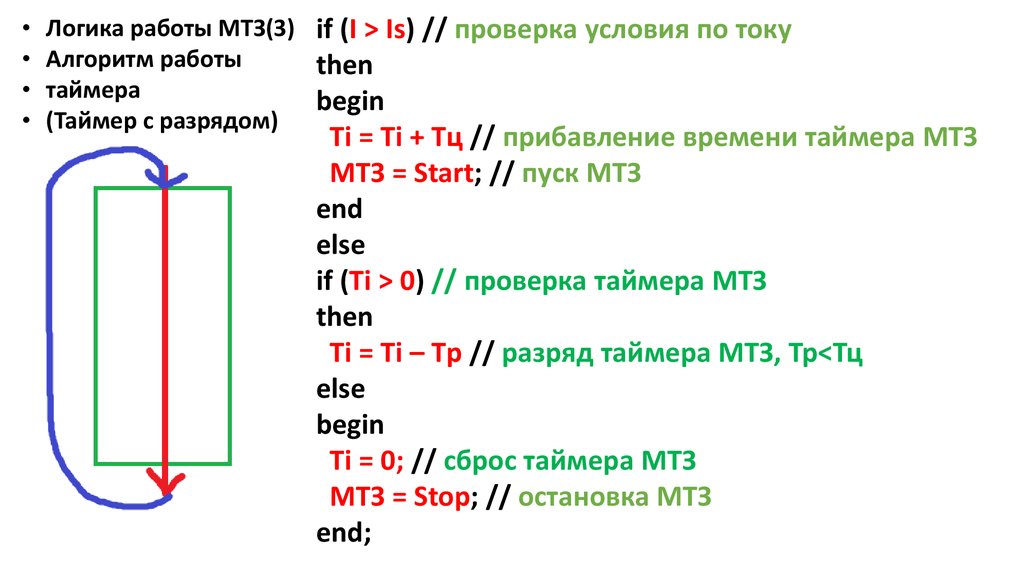
62.
Логика работы МТЗ(3) if (I > Is) // проверка условия по току
Алгоритм работы
then
таймера
begin
(Таймер с разрядом)
Ti = Ti + Tц // прибавление времени таймера МТЗ
МТЗ = Start; // пуск МТЗ
end
else
if (Ti > 0) // проверка таймера МТЗ
then
Ti = Ti – Tр // разряд таймера МТЗ, Тр<Тц
else
begin
Ti = 0; // сброс таймера МТЗ
МТЗ = Stop; // остановка МТЗ
end;
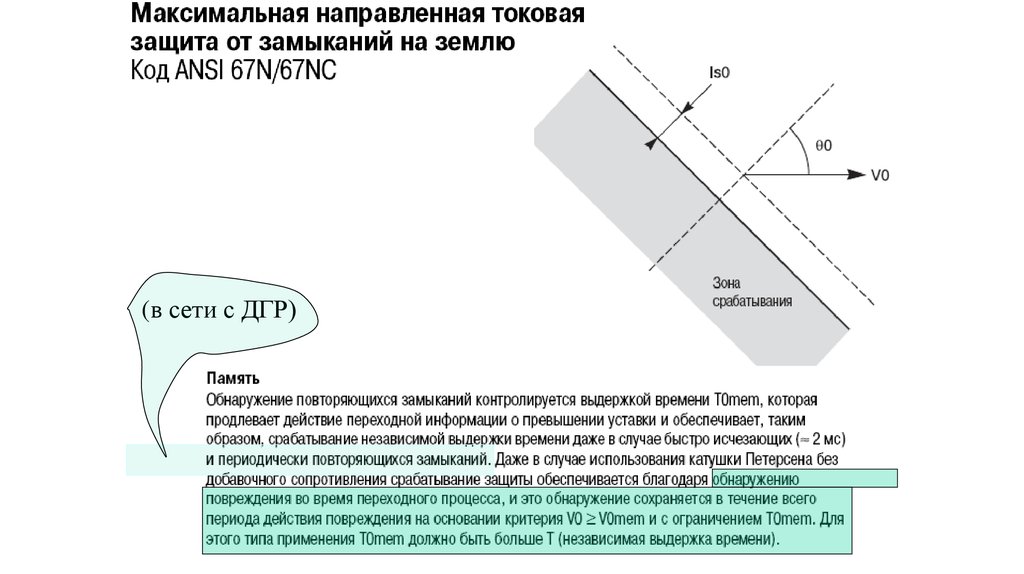
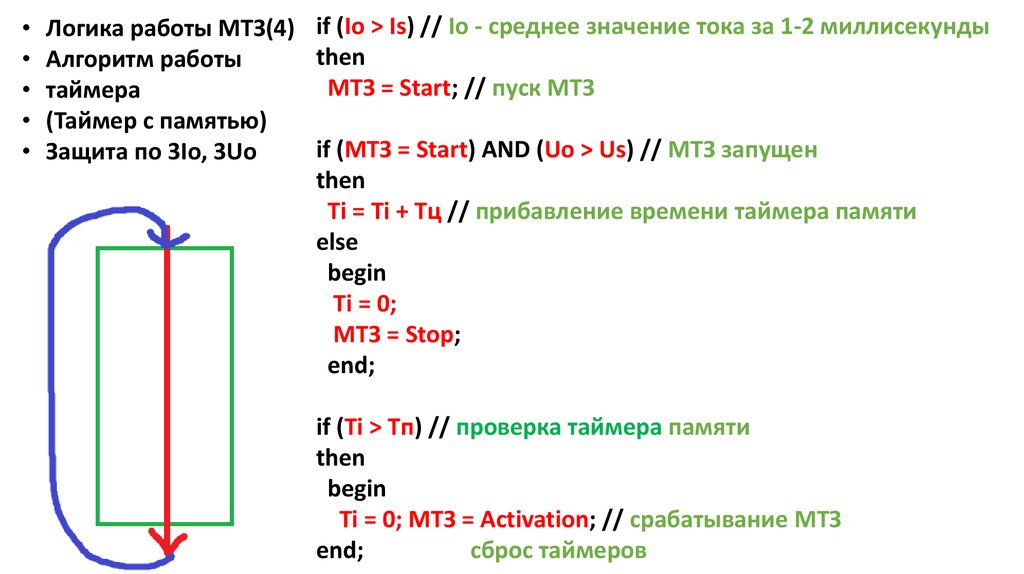
63.
(в сети с ДГР)64.
Логика работы МТЗ(4) if (Io > Is) // Io - среднее значение тока за 1-2 миллисекунды
then
Алгоритм работы
МТЗ = Start; // пуск МТЗ
таймера
(Таймер с памятью)
if (МТЗ = Start) AND (Uo > Us) // МТЗ запущен
Защита по 3Io, 3Uo
then
Ti = Тi + Tц // прибавление времени таймера памяти
else
begin
Ti = 0;
МТЗ = Stop;
end;
if (Ti > Tп) // проверка таймера памяти
then
begin
Ti = 0; МТЗ = Activation; // срабатывание МТЗ
end;
сброс таймеров
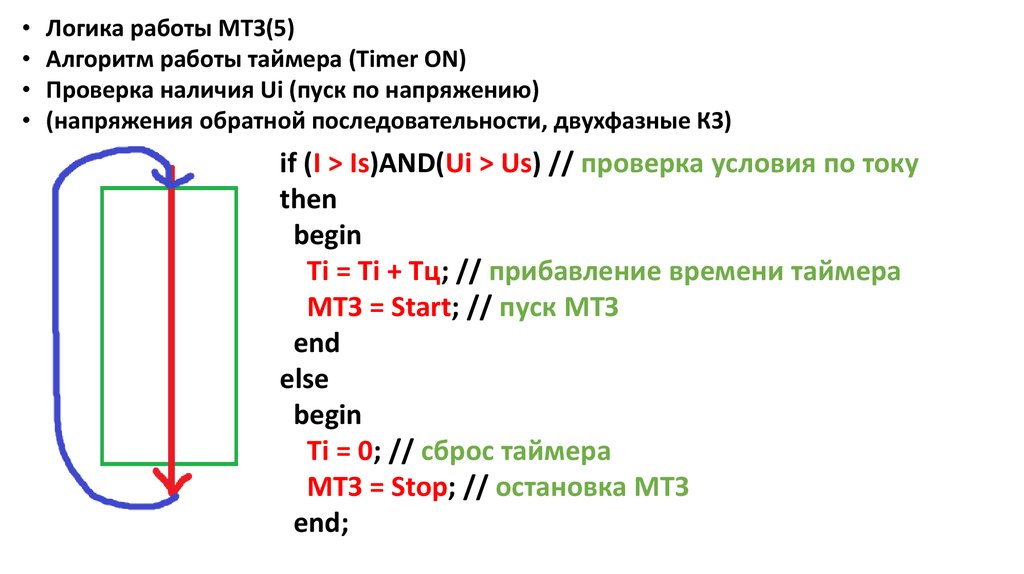
65.
Логика работы МТЗ(5)
Алгоритм работы таймера (Timer ON)
Проверка наличия Ui (пуск по напряжению)
(напряжения обратной последовательности, двухфазные КЗ)
if (I > Is)AND(Ui > Us) // проверка условия по току
then
begin
Ti = Ti + Tц; // прибавление времени таймера
МТЗ = Start; // пуск МТЗ
end
else
begin
Ti = 0; // сброс таймера
МТЗ = Stop; // остановка МТЗ
end;
66.
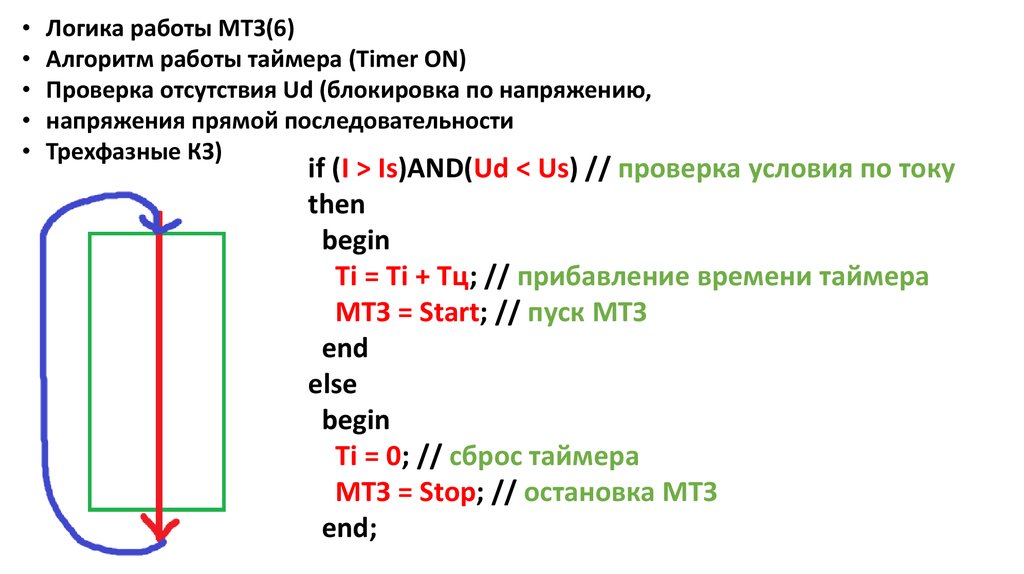
Логика работы МТЗ(6)
Алгоритм работы таймера (Timer ON)
Проверка отсутствия Ud (блокировка по напряжению,
напряжения прямой последовательности
Трехфазные КЗ)
if (I > Is)AND(Ud < Us) // проверка условия по току
then
begin
Ti = Ti + Tц; // прибавление времени таймера
МТЗ = Start; // пуск МТЗ
end
else
begin
Ti = 0; // сброс таймера
МТЗ = Stop; // остановка МТЗ
end;
67.
Логика работы МТЗ(7)
Алгоритм работы таймера (Timer ON)
Проверка направления мощности (Р > 0)
Направленные защиты
if (I > Is)AND(P > 0) // проверка условия по току
then
begin
Ti = Ti + Tц; // прибавление времени таймера
МТЗ = Start; // пуск МТЗ
end
else
begin
Ti = 0; // сброс таймера
МТЗ = Stop; // остановка МТЗ
end;
68.
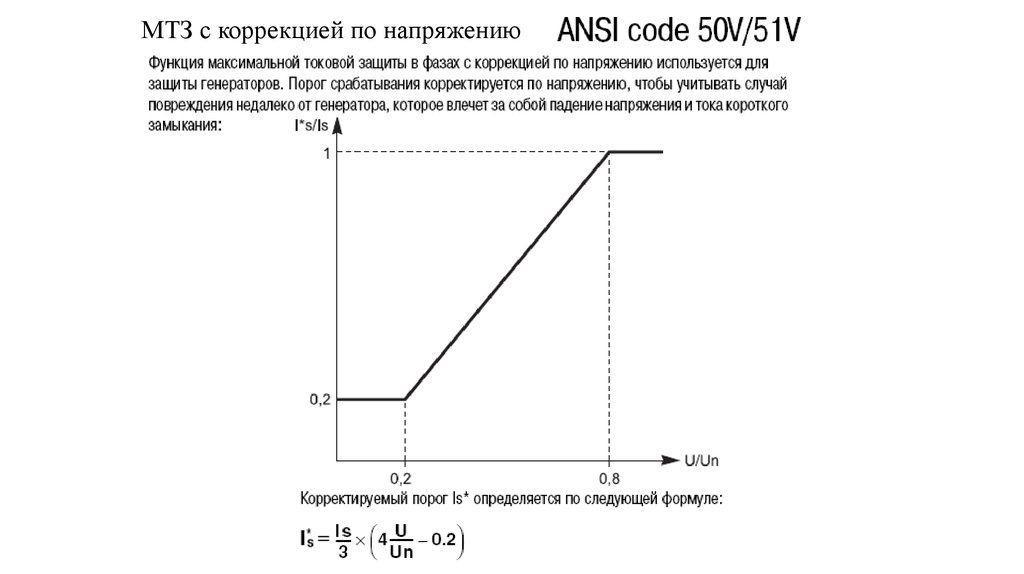
МТЗ с коррекцией по напряжению69.
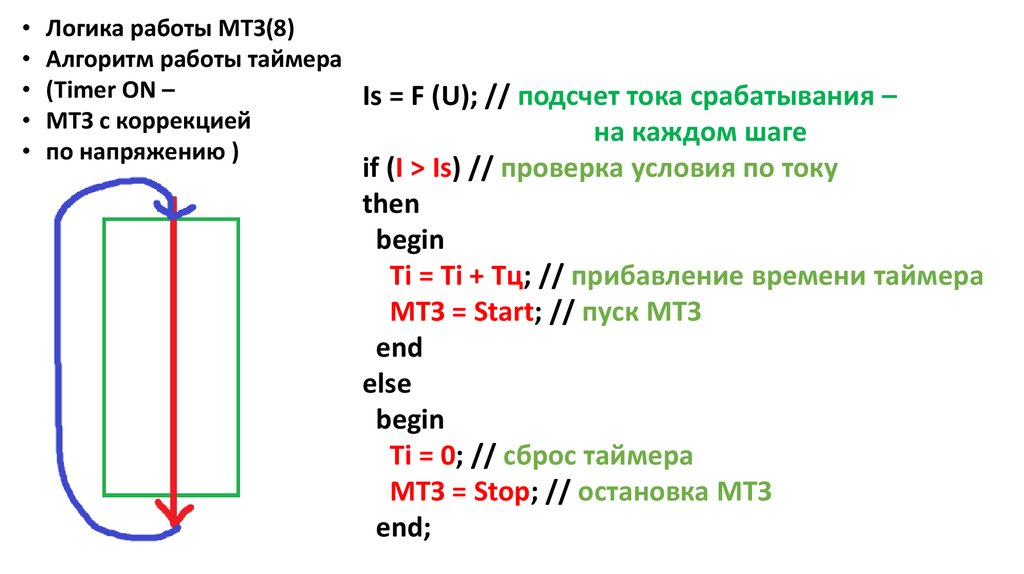
Логика работы МТЗ(8)
Алгоритм работы таймера
(Timer ON –
Is = F (U); // подсчет тока срабатывания –
МТЗ с коррекцией
на каждом шаге
по напряжению )
if (I > Is) // проверка условия по току
then
begin
Ti = Ti + Tц; // прибавление времени таймера
МТЗ = Start; // пуск МТЗ
end
else
begin
Ti = 0; // сброс таймера
МТЗ = Stop; // остановка МТЗ
end;
70. Времятоковая кривая аварийного отключения Время срабатывания Ts – зависит от текущего тока I Стандартные кривые SIT, EIT,
ручной ввод кривой• Одна
персонализированная
кривая авар. отключения
• Общая для
следующих защит:
50/51 (МТЗ),
50N/51N, 50V/51V, 46
и 67
• вводится с помощью
SFT2841
• Для решения всех спец.
случаев сложной
координации защит
Время ав. откл T
для I=10Is
Кривая вводится
точка за точкой
(30 точек макс.)
Независим.
время за
последней
введенной
точкой
71.
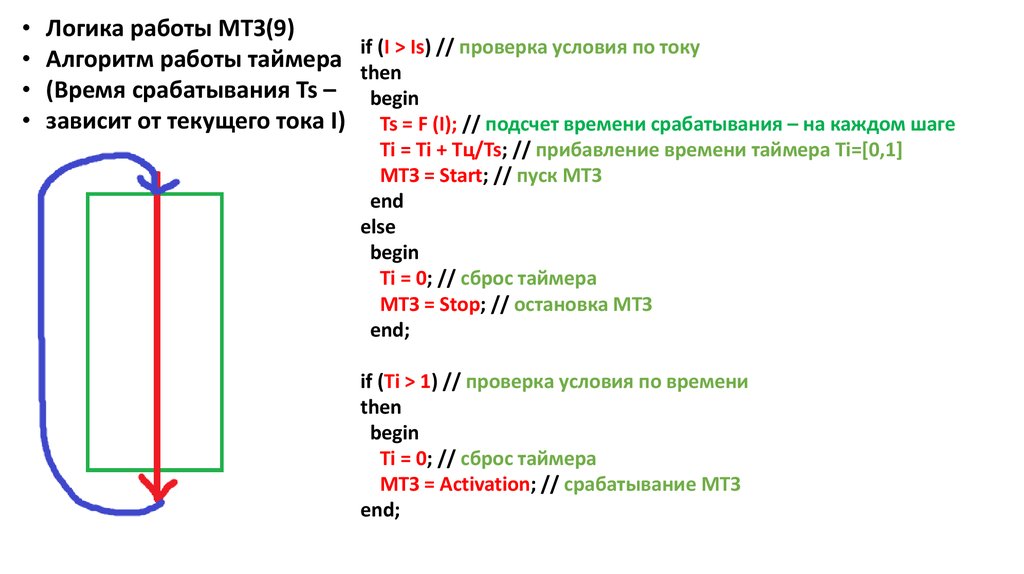
Логика работы МТЗ(9)
if (I > Is) // проверка условия по току
Алгоритм работы таймера then
(Время срабатывания Ts – begin
зависит от текущего тока I) Ts = F (I); // подсчет времени срабатывания – на каждом шаге
Ti = Ti + Tц/Ts; // прибавление времени таймера Тi=[0,1]
МТЗ = Start; // пуск МТЗ
end
else
begin
Ti = 0; // сброс таймера
МТЗ = Stop; // остановка МТЗ
end;
if (Ti > 1) // проверка условия по времени
then
begin
Ti = 0; // сброс таймера
МТЗ = Activation; // срабатывание МТЗ
end;
72.
73.
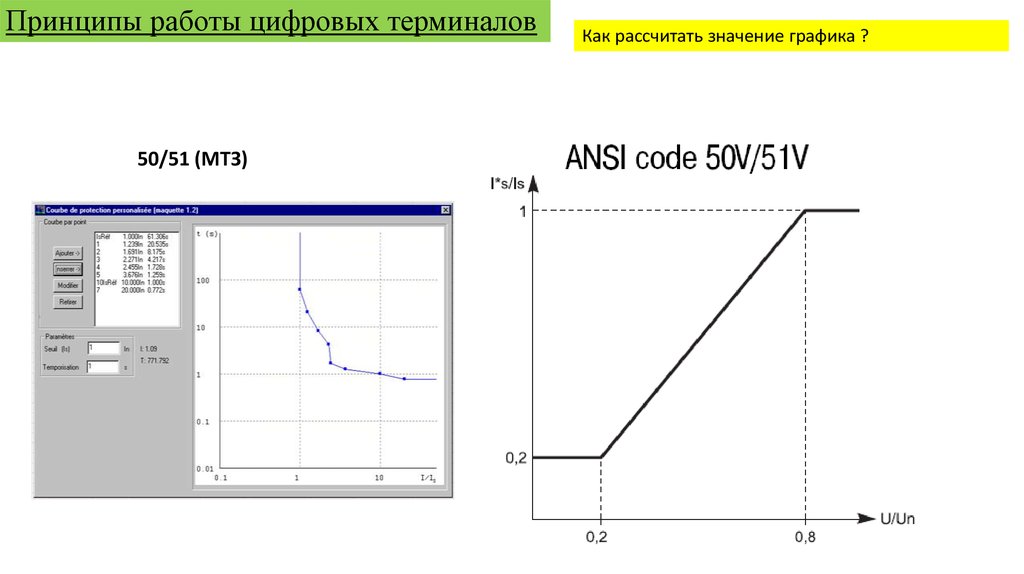
Принципы работы цифровых терминалов50/51 (МТЗ)
Как рассчитать значение графика ?
74.
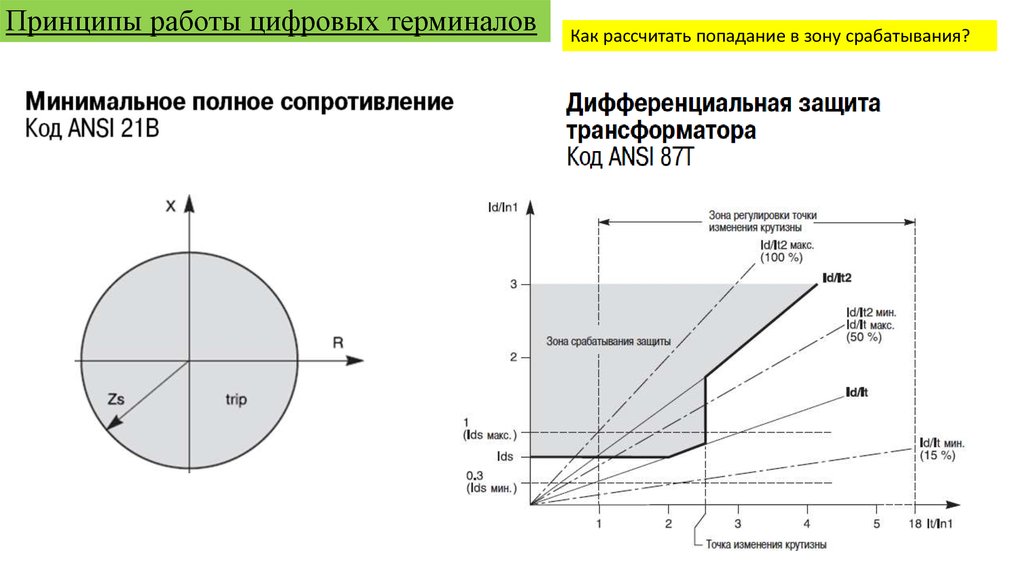
Принципы работы цифровых терминаловКак рассчитать попадание в зону срабатывания?
75.
Принципы работы цифровых терминаловКак рассчитать попадание в зону срабатывания?
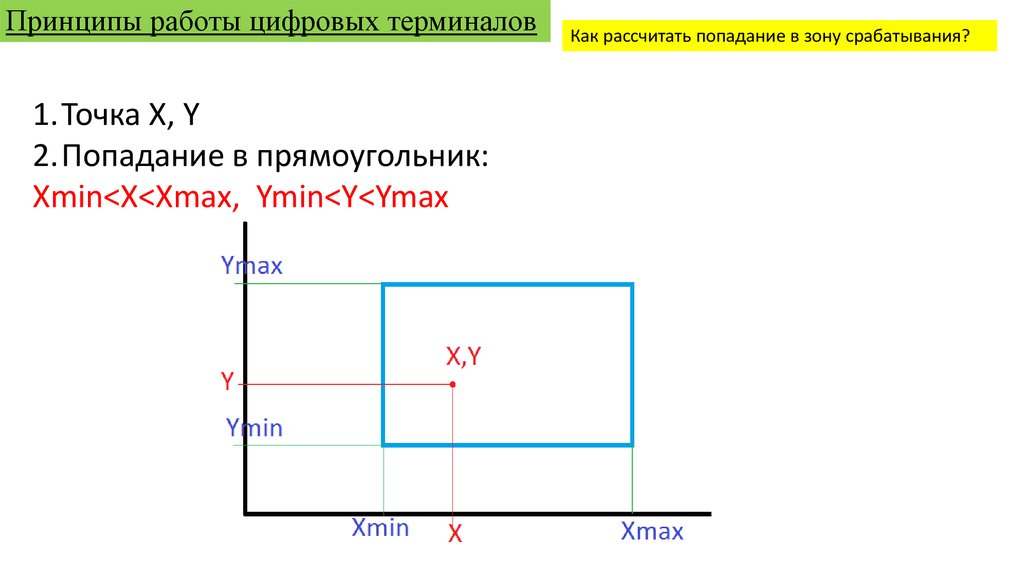
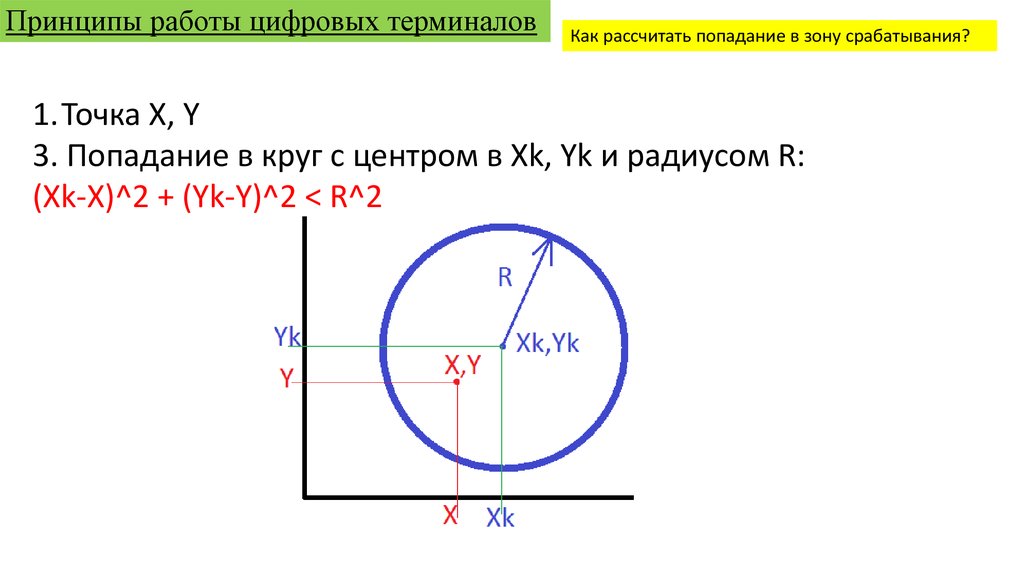
1.Точка X, Y
2.Попадание в прямоугольник:
Xmin<X<Xmax, Ymin<Y<Ymax
3. Попадание в круг с центром в Xk, Yk и радиусом R:
(Xk-X)^2 + (Yk-Y)^2 < R^2
4. Попадание в эллипс с центрами (X1,Y1), (X2,Y2) и суммой
расстояний эллипса до центров R
√[(X1-X)^2+(Y1-Y)^2]+ √[(X2-X)^2+(Y2-Y)^2] < R
76.
Принципы работы цифровых терминалов1.Точка X, Y
2.Попадание в прямоугольник:
Xmin<X<Xmax, Ymin<Y<Ymax
Как рассчитать попадание в зону срабатывания?
77.
Принципы работы цифровых терминаловКак рассчитать попадание в зону срабатывания?
1.Точка X, Y
3. Попадание в круг с центром в Xk, Yk и радиусом R:
(Xk-X)^2 + (Yk-Y)^2 < R^2
78.
Принципы работы цифровых терминаловКак рассчитать попадание в зону срабатывания?
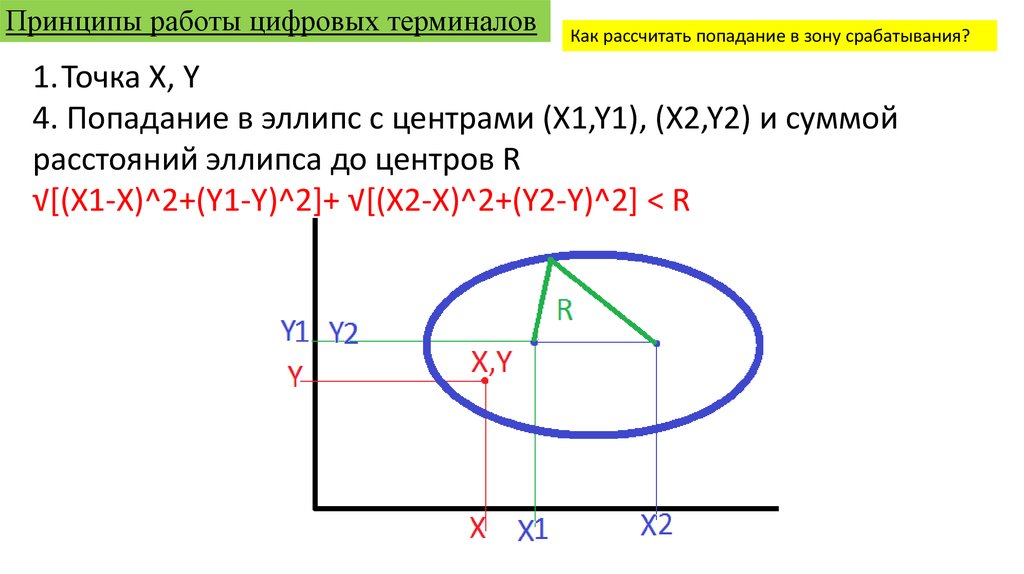
1.Точка X, Y
4. Попадание в эллипс с центрами (X1,Y1), (X2,Y2) и суммой
расстояний эллипса до центров R
√[(X1-X)^2+(Y1-Y)^2]+ √[(X2-X)^2+(Y2-Y)^2] < R
79.
Принципы работы цифровых терминаловПредварительное вычисление:
1. Разбиваем рабочий диапазон на
отрезки (прямоугольники)
2. Вычисляем значение графика на
отрезке (попадание прямоугольника в
зону срабатывания)
3. Получаем массив D(i) (значение
графика на i- том отрезке),
4. Получаем массив D(ij) (1 – попадание/
0 – не попадание в зону срабатывания)
5. Переводим координаты в индексы:
i = int(Х/dX), j = int(Y/dY)
6. Считываем значение графика из
массива D(i), попадание в зону
срабатывания из массива D(ij)
Как рассчитать попадание в зону срабатывания?
Значения D(I, j) = 0 или 1
80.
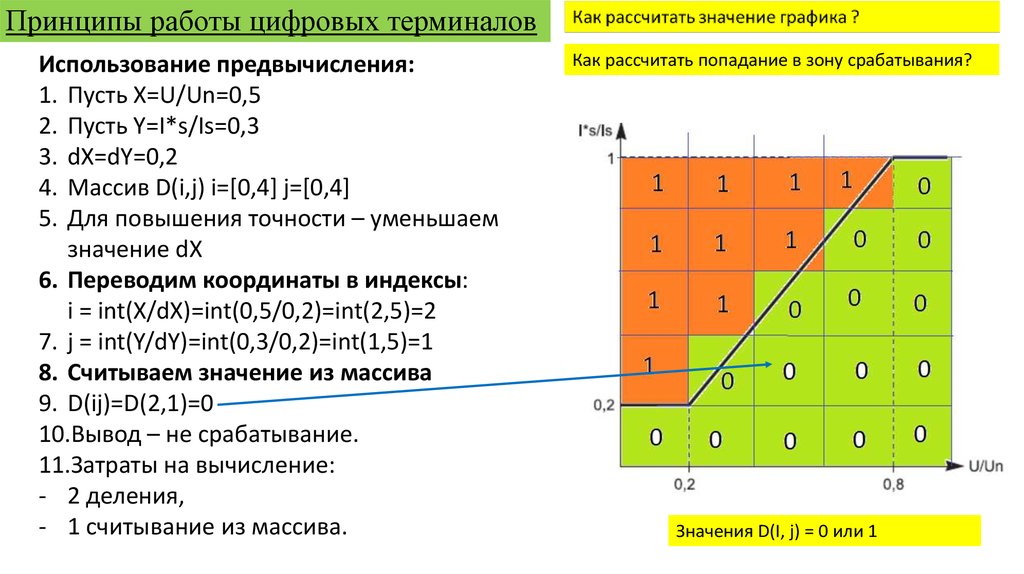
Принципы работы цифровых терминаловИспользование предвычисления:
1. Пусть X=U/Un=0,5
2. Пусть Y=I*s/Is=0,3
3. dX=dY=0,2
4. Массив D(i,j) i=[0,4] j=[0,4]
5. Для повышения точности – уменьшаем
значение dX
6. Переводим координаты в индексы:
i = int(Х/dX)=int(0,5/0,2)=int(2,5)=2
7. j = int(Y/dY)=int(0,3/0,2)=int(1,5)=1
8. Считываем значение из массива
9. D(ij)=D(2,1)=0
10.Вывод – не срабатывание.
11.Затраты на вычисление:
- 2 деления,
- 1 считывание из массива.
Как рассчитать попадание в зону срабатывания?
Значения D(I, j) = 0 или 1
81.
Использование гармоник82.
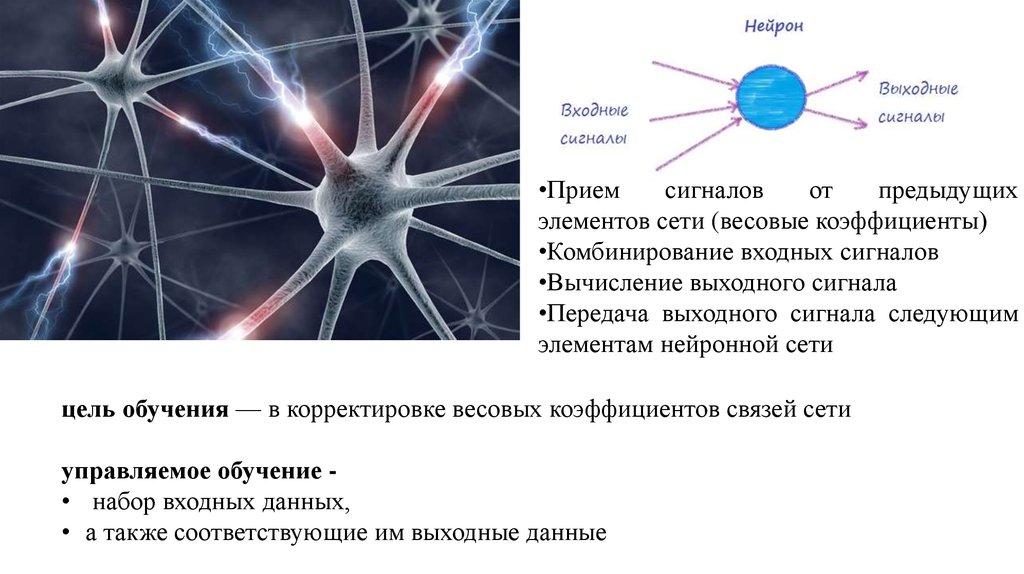
•Приемсигналов
от
предыдущих
элементов сети (весовые коэффициенты)
•Комбинирование входных сигналов
•Вычисление выходного сигнала
•Передача выходного сигнала следующим
элементам нейронной сети
цель обучения — в корректировке весовых коэффициентов связей сети
управляемое обучение • набор входных данных,
• а также соответствующие им выходные данные
83.
Два способа программирования:1. Если знаем алгоритм действий – пишем программу
(набор инструкций)
2. Если алгоритм не знаем – создаем нейронную
сеть,
- Обучаем нейронную сеть – подавая на вход
эталонные наборы сигналов (нормальный режим –
сеть должна выдать 0, переходный режим – сеть
должна выдать 1), при правильном выходе – подаем
на вход управления подаем 1, при неправильном
выходе 0, подаем тестовые сигналы – до тех пор,
пока сеть не начнет выдавать правильные сигналы
- Копируем созданную сеть (с ее коэффициентами
связи) – во все терминалы
84.
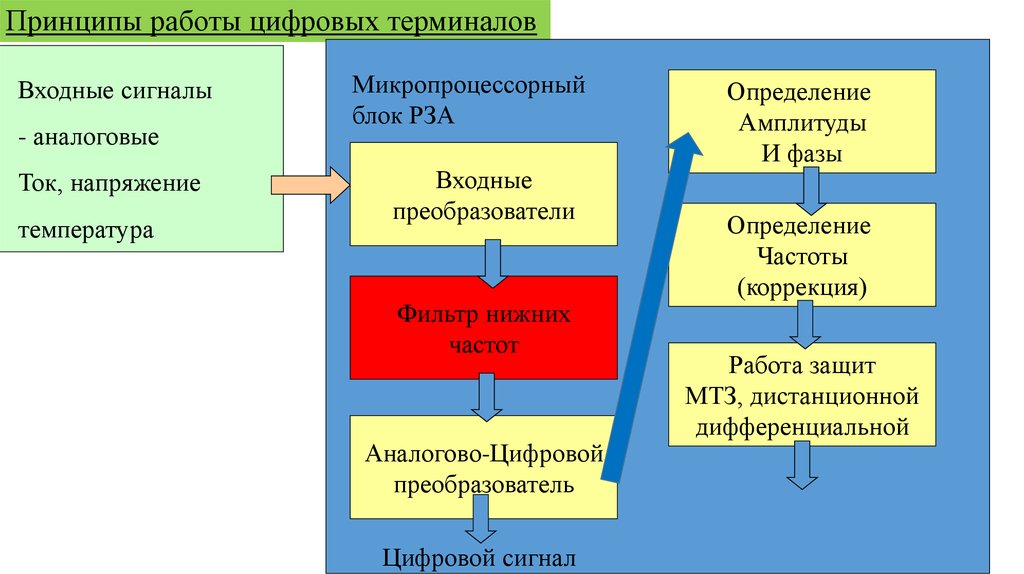
Принципы работы цифровых терминаловВходные сигналы
- аналоговые
Ток, напряжение
температура
Микропроцессорный
блок РЗА
Входные
преобразователи
Фильтр нижних
частот
Аналогово-Цифровой
преобразователь
Цифровой сигнал
Определение
Амплитуды
И фазы
Определение
Частоты
(коррекция)
Работа защит
МТЗ, дистанционной
дифференциальной
85.
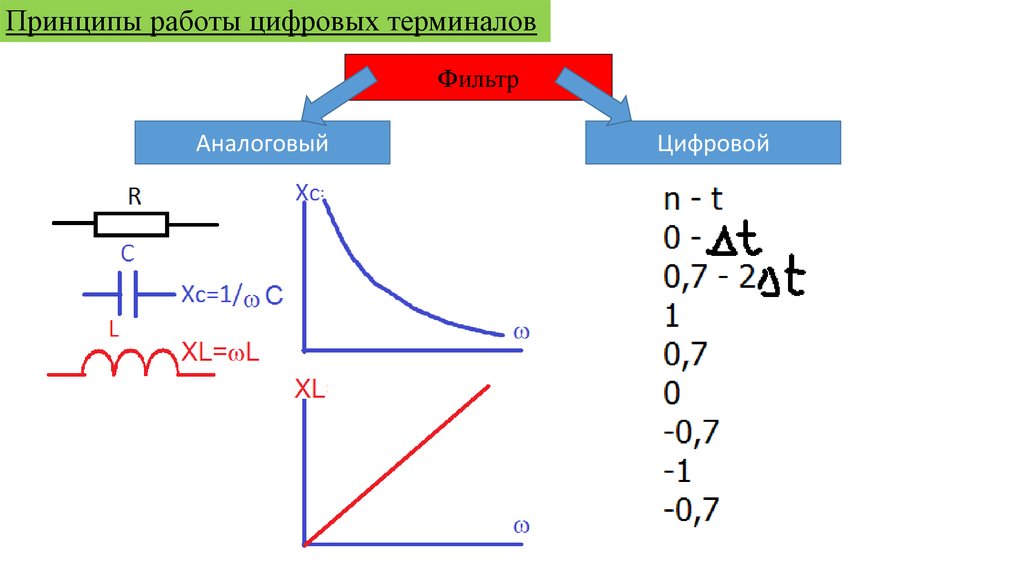
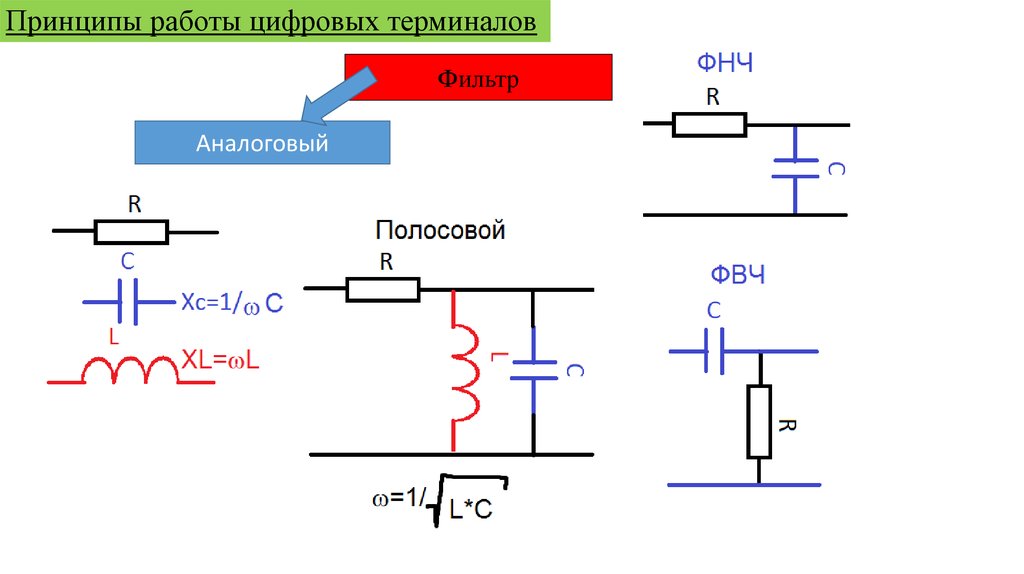
Принципы работы цифровых терминаловФильтр
Аналоговый
Цифровой
86.
Принципы работы цифровых терминаловФильтр
Аналоговый
87.
Принципы работы цифровых терминаловФильтр
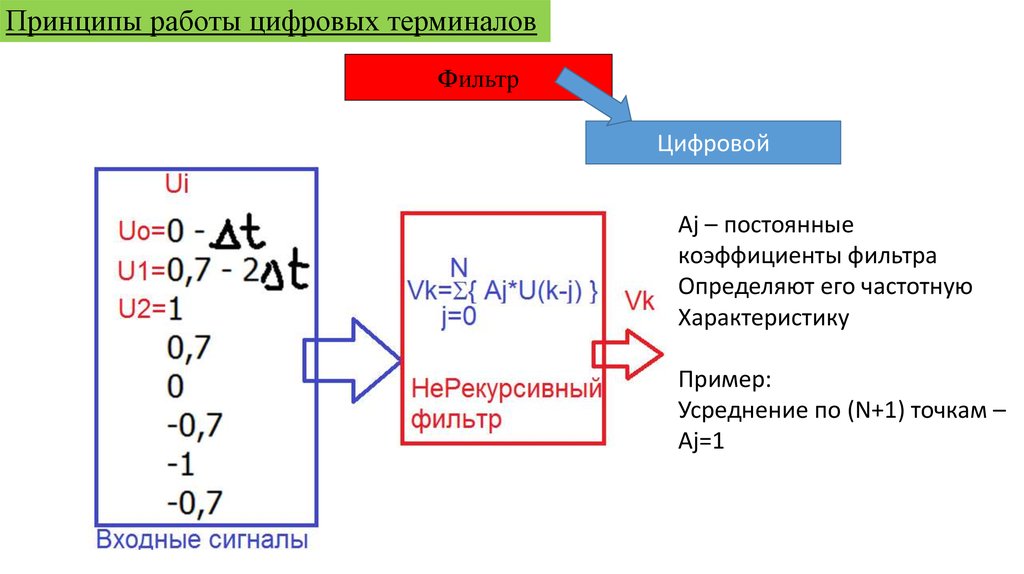
Цифровой
Aj – постоянные
коэффициенты фильтра
Определяют его частотную
Характеристику
Пример:
Усреднение по (N+1) точкам –
Aj=1
88.
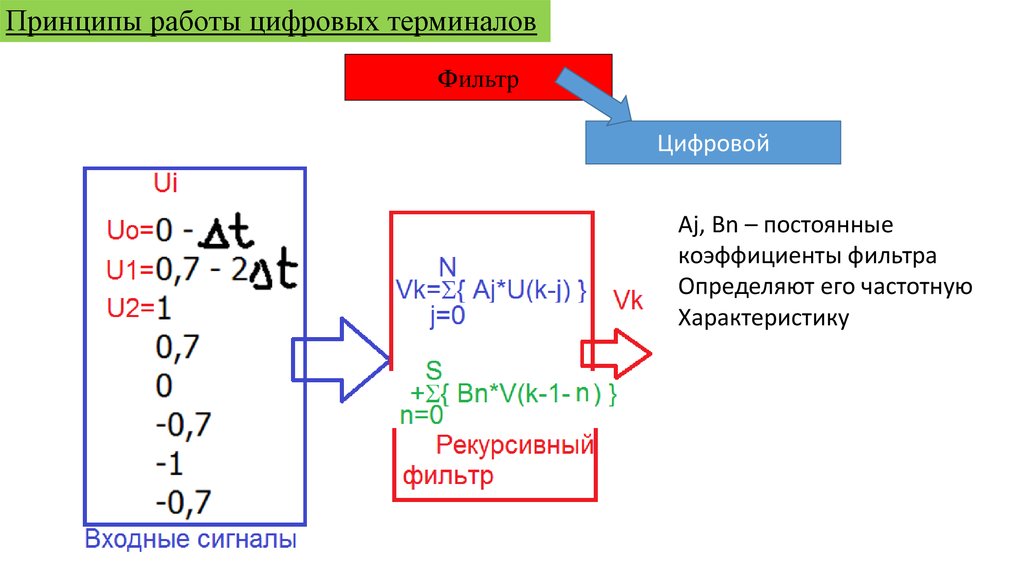
Принципы работы цифровых терминаловФильтр
Цифровой
Aj, Bn – постоянные
коэффициенты фильтра
Определяют его частотную
Характеристику
89.
Принципы работы цифровых терминаловВходные сигналы
- аналоговые
Ток, напряжение
температура
Программирование
Автоматики
(АПВ, АВР, ..)
Микропроцессорный
блок РЗА
Входные
преобразователи
Фильтр нижних
частот
Аналогово-Цифровой
преобразователь
Цифровой сигнал
Определение
Амплитуды
И фазы
Определение
Частоты
(коррекция)
Работа защит
МТЗ, дистанционной
дифференциальной
90.
Принципы работы цифровых терминаловПрограммирование автоматики:
Программирование
Автоматики
(АПВ, АВР, ..)
Где –
• контроллер РЗА (Sepam 40, 80),
• ПЛК (Zelio)
Языки программирования –
FBD (Function Block Diagram) (ПЛК Zelio),
LD (Ladder Diagram) (Zelio, Sepam 80),
ST (Structured Text),
логические уравнения (Sepam 40, 80).
91.
Принципы работы цифровых терминаловПрограммирование
Автоматики
(АПВ, АВР, ..)
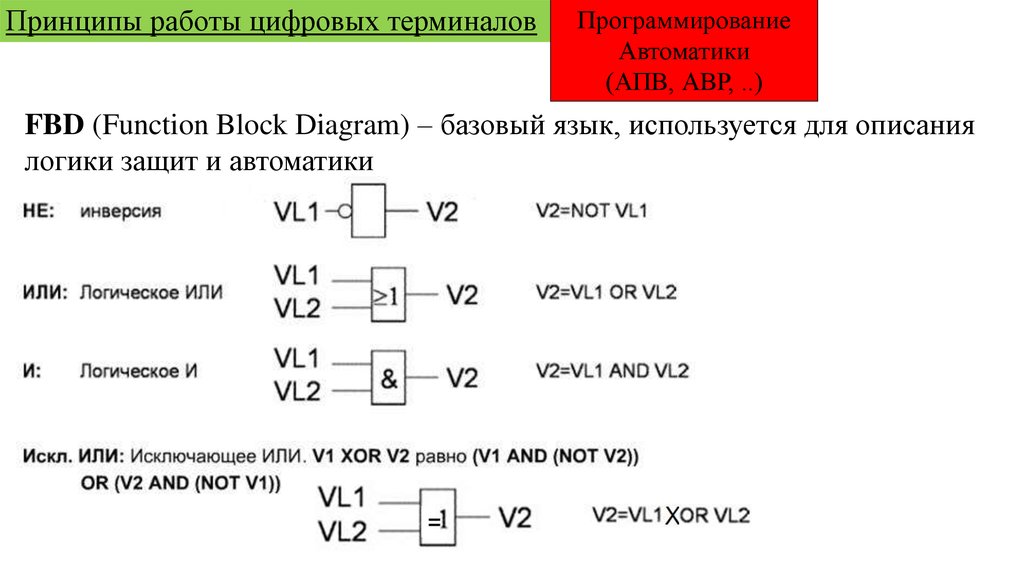
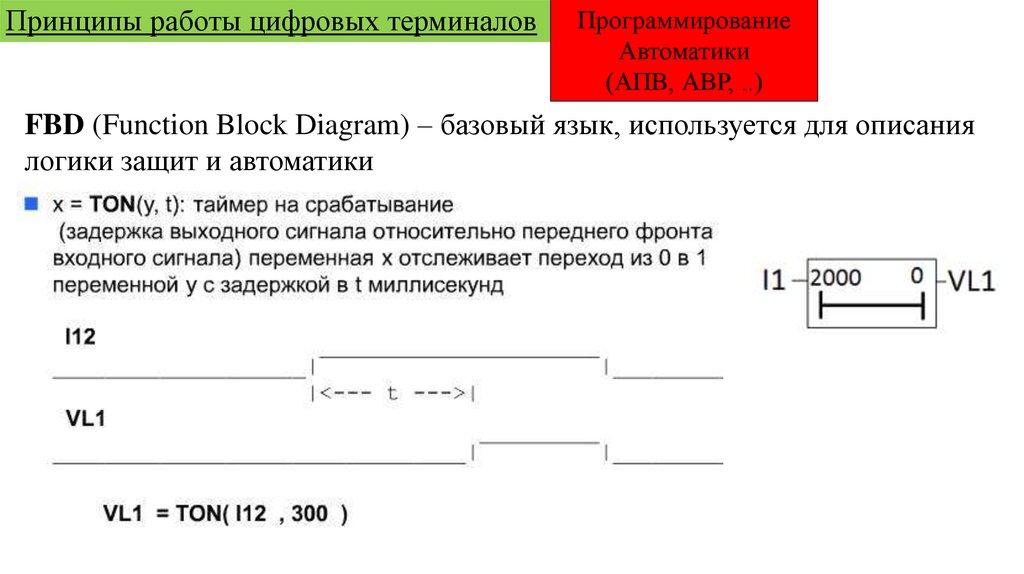
FBD (Function Block Diagram) – базовый язык, используется для описания
логики защит и автоматики
92.
Принципы работы цифровых терминаловПрограммирование
Автоматики
(АПВ, АВР, ..)
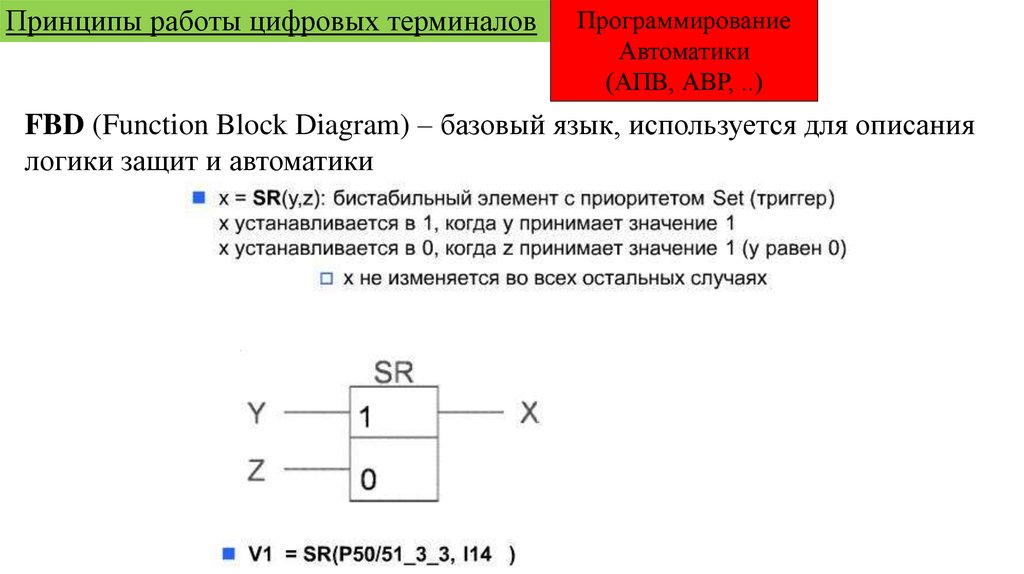
FBD (Function Block Diagram) – базовый язык, используется для описания
логики защит и автоматики
93.
Принципы работы цифровых терминаловПрограммирование
Автоматики
(АПВ, АВР, ..)
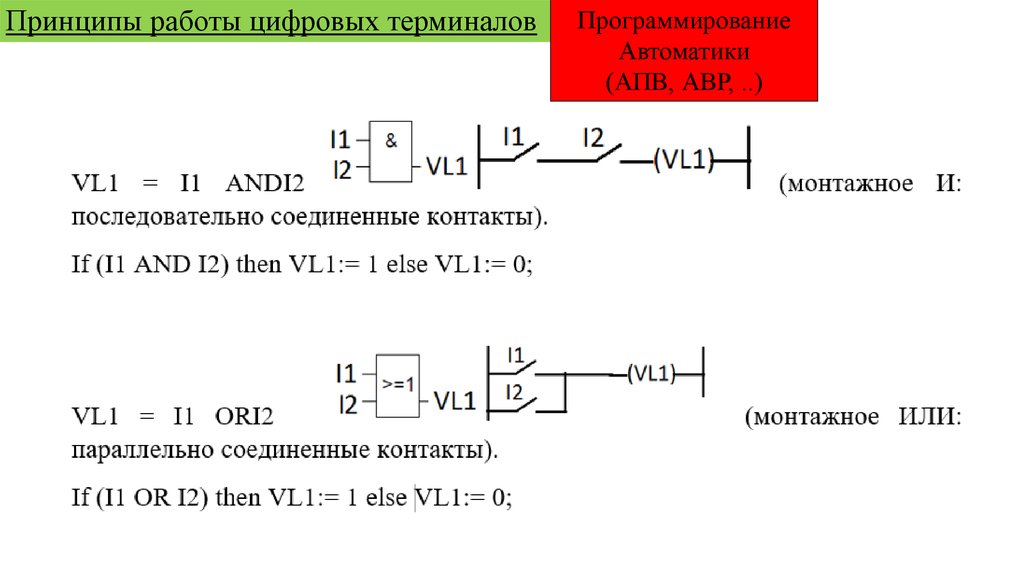
FBD (Function Block Diagram) – базовый язык, используется для описания
логики защит и автоматики
94.
Принципы работы цифровых терминаловПрограммирование
Автоматики
(АПВ, АВР, ..)
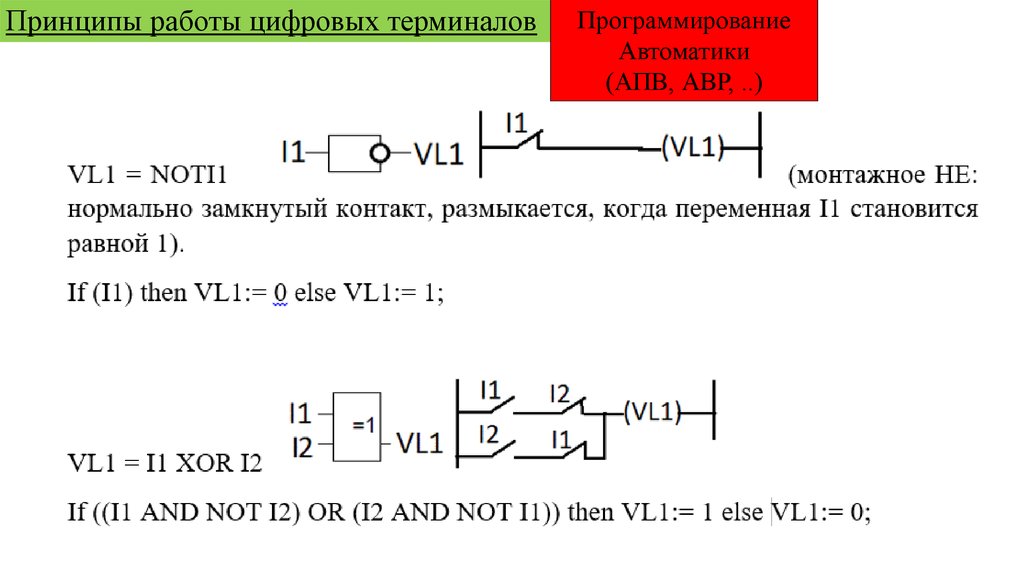
FBD (Function Block Diagram) – базовый язык, используется для описания
логики защит и автоматики
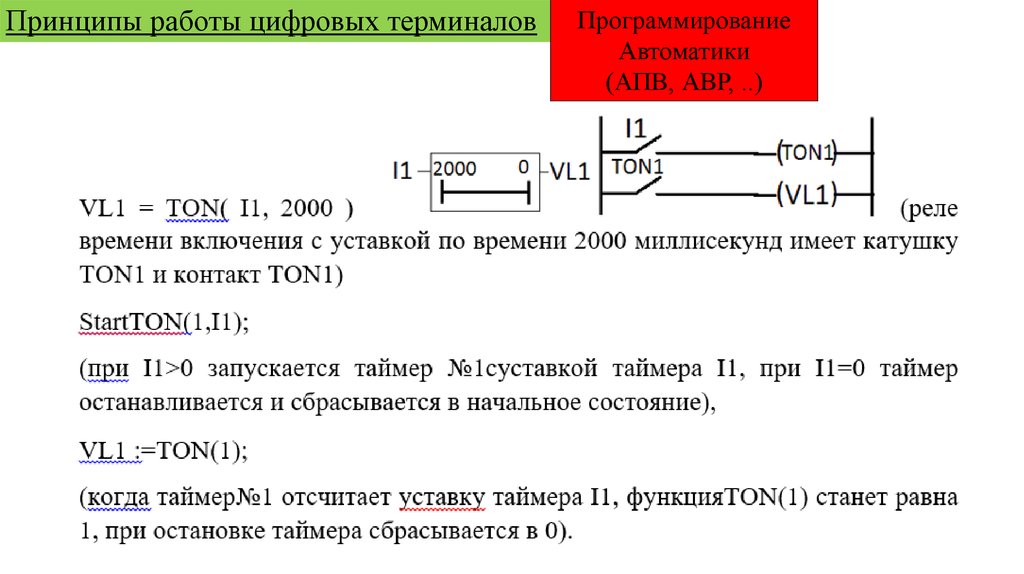
95.
Принципы работы цифровых терминаловПрограммирование
Автоматики
(АПВ, АВР, ..)
96.
Принципы работы цифровых терминаловПрограммирование
Автоматики
(АПВ, АВР, ..)
97.
Принципы работы цифровых терминаловПрограммирование
Автоматики
(АПВ, АВР, ..)
98.
Принципы работы цифровых терминаловПрограммирование
Автоматики
(АПВ, АВР, ..)