






 Программирование
ПрограммированиеПохожие презентации:





")
")



Цикловое управление манипулятором МП-9с c помощью TM-238
1.
Міністерство освіти і науки УкраїниДержавний вищий навчальний заклад
“Національний гірничий університет”
Кафедра електропривода
Авторизований навчальний центр “Schneider Electric”
Розробив: Яланський О.А., доцент кафедри електропривода
м. Дніпропетровськ
2012 - 2013
2. Цикловое управление манипулятором МП-9с c помощью TM-238
Цель работы: Рассмотреть различные подходы крешению одной типовой задачи циклового управления с
использованием разных языков программирования и
различных типов входных/выходных данных.
2
3. Цикловое управление манипулятором МП-9с c помощью TM-238
• Обеспечить движение схвата манипулятора позамкнутой траектории;
• Начальная установка руки и схвата выполняется
вручную.
3
4.
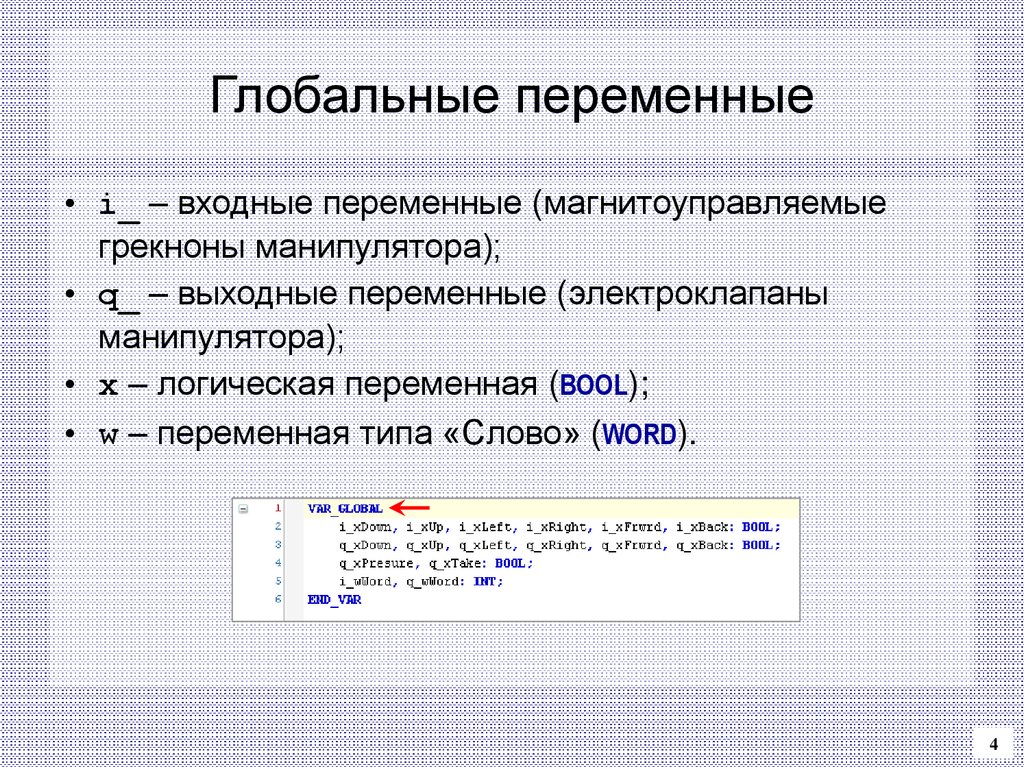
Глобальные переменные• i_ – входные переменные (магнитоуправляемые
грекноны манипулятора);
• q_ – выходные переменные (электроклапаны
манипулятора);
• x – логическая переменная (BOOL);
• w – переменная типа «Слово» (WORD).
4
5. Базовые варианты реализации
• Используются глобальные переменныевходов/выходов типа BOOL;
• Локальные вспомогательные переменные не
требуются;
• Определив текущее положение схвата, можно задать
движение по одной степени свободы к следующей
точке траектории.
5
6.
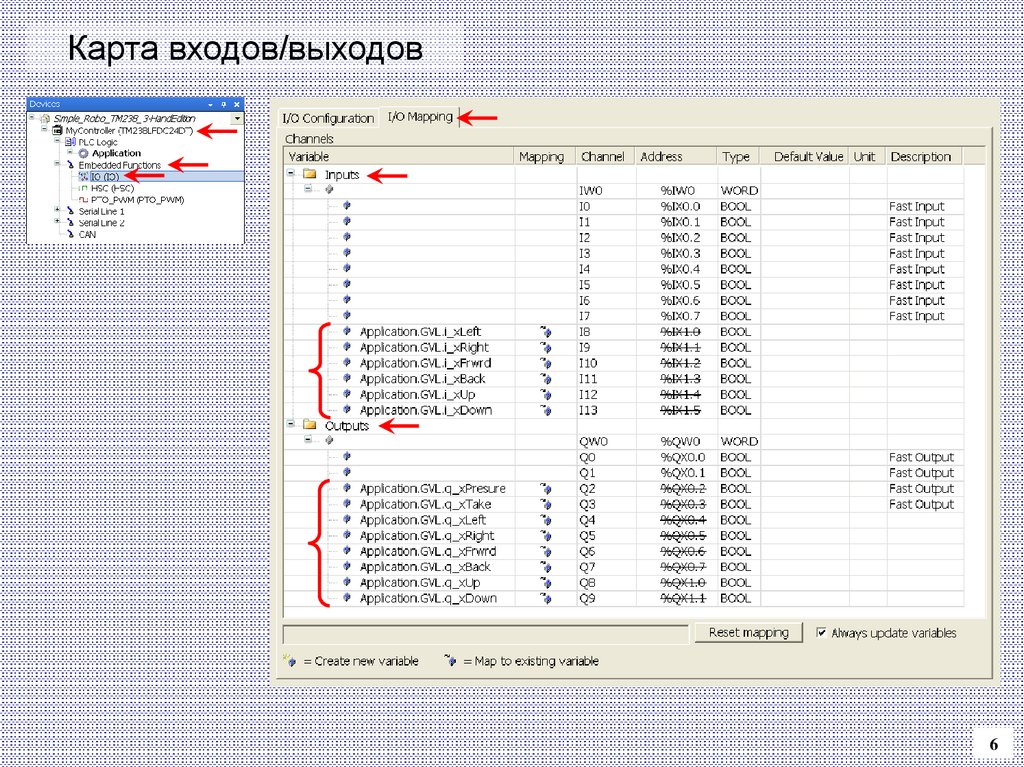
Карта входов/выходов6
7.
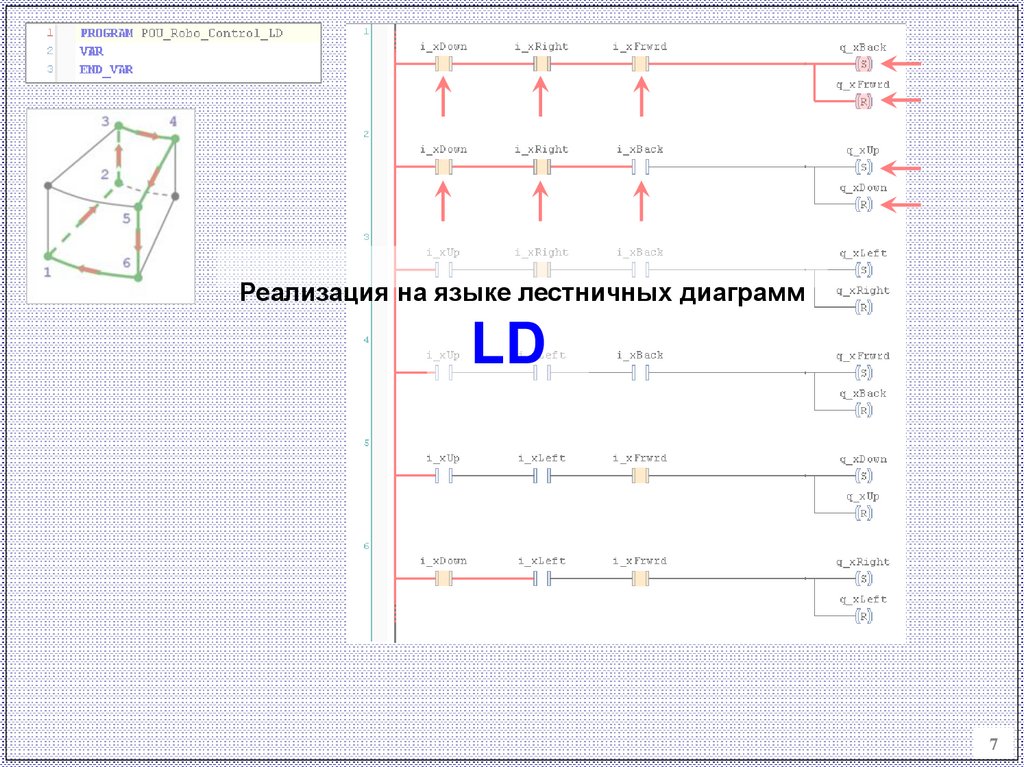
Реализация на языке лестничных диаграммLD
7
8.
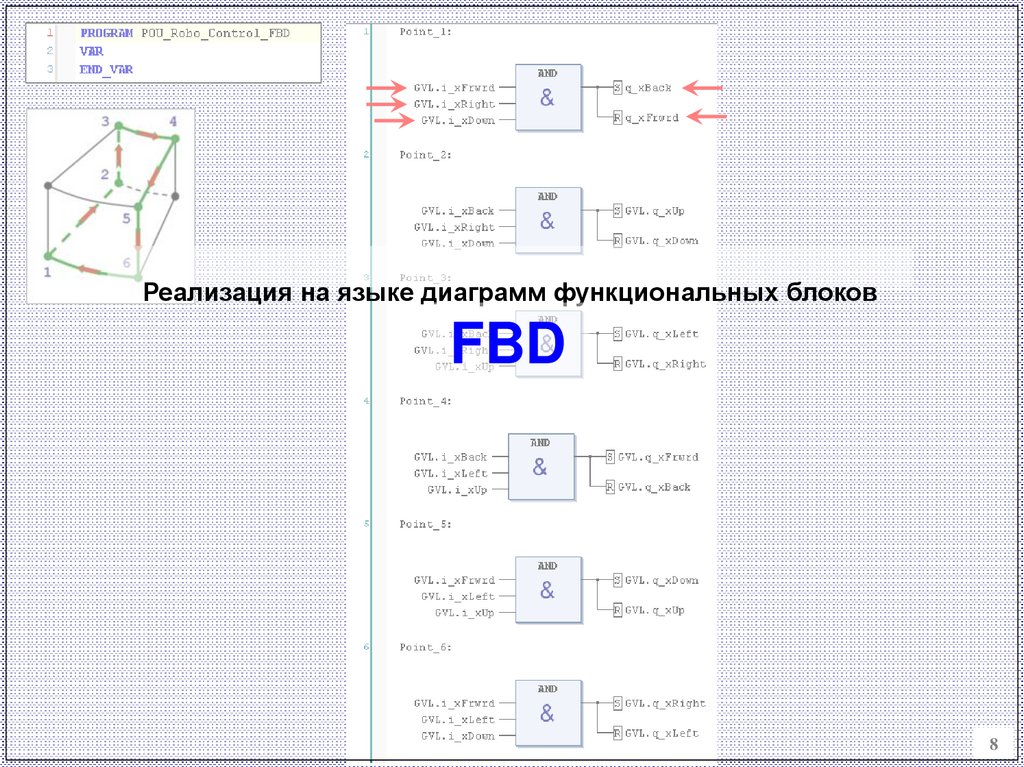
Реализация на языке диаграмм функциональных блоковFBD
8
9.
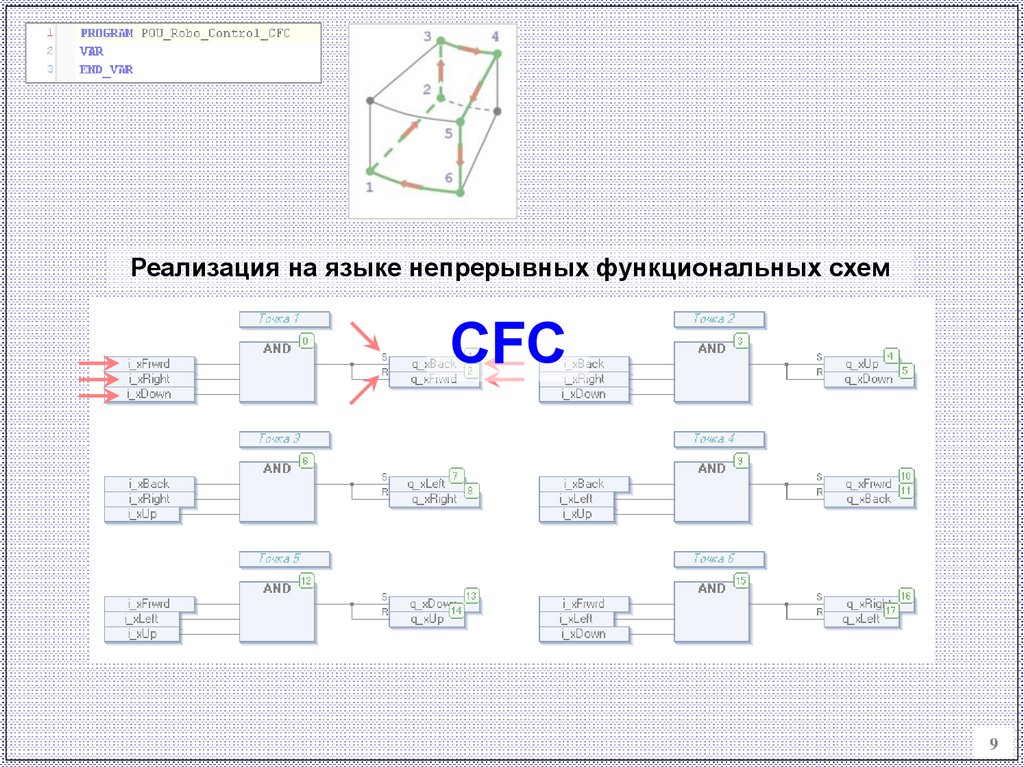
Реализация на языке непрерывных функциональных схемСFС
9
10.
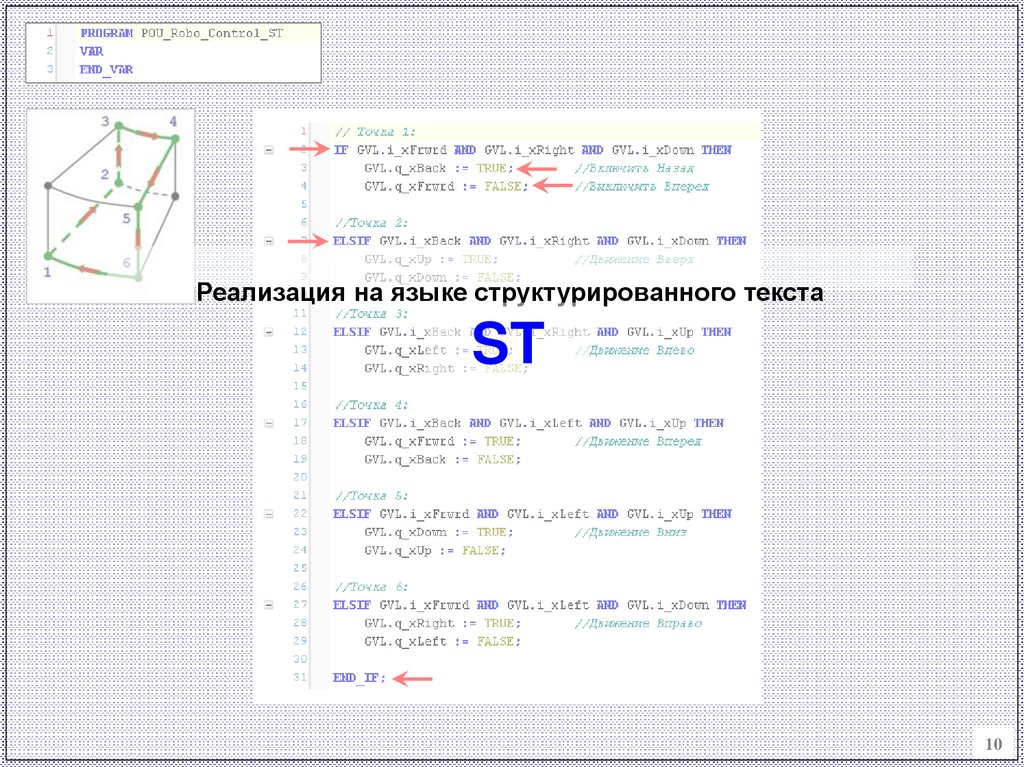
Реализация на языке структурированного текстаST
10
11.
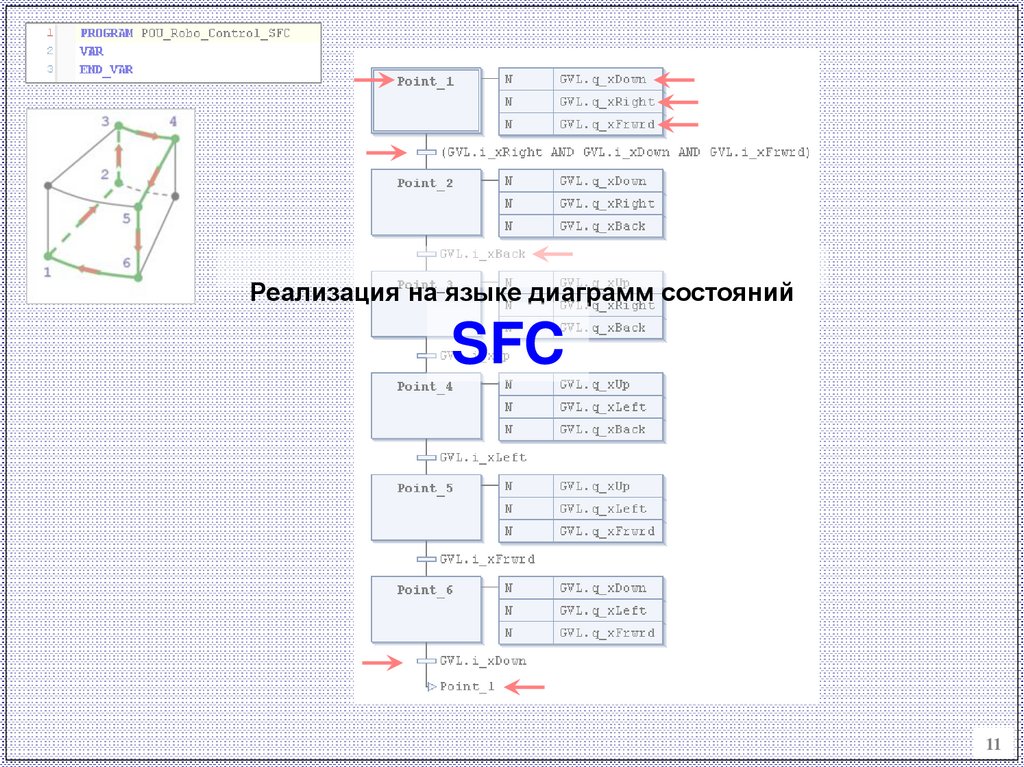
Реализация на языке диаграмм состоянийSFC
11
12. Дополнительные варианты реализации
• Возможно использование вспомогательныхлокальных переменных и функциональных
блоков;
• При попадании в точку траектории
увеличиваем значение счетчика номера
текущей точки;
• В соответствии с номером текущей точки
задаем движение к следующей точке
траектории.
12
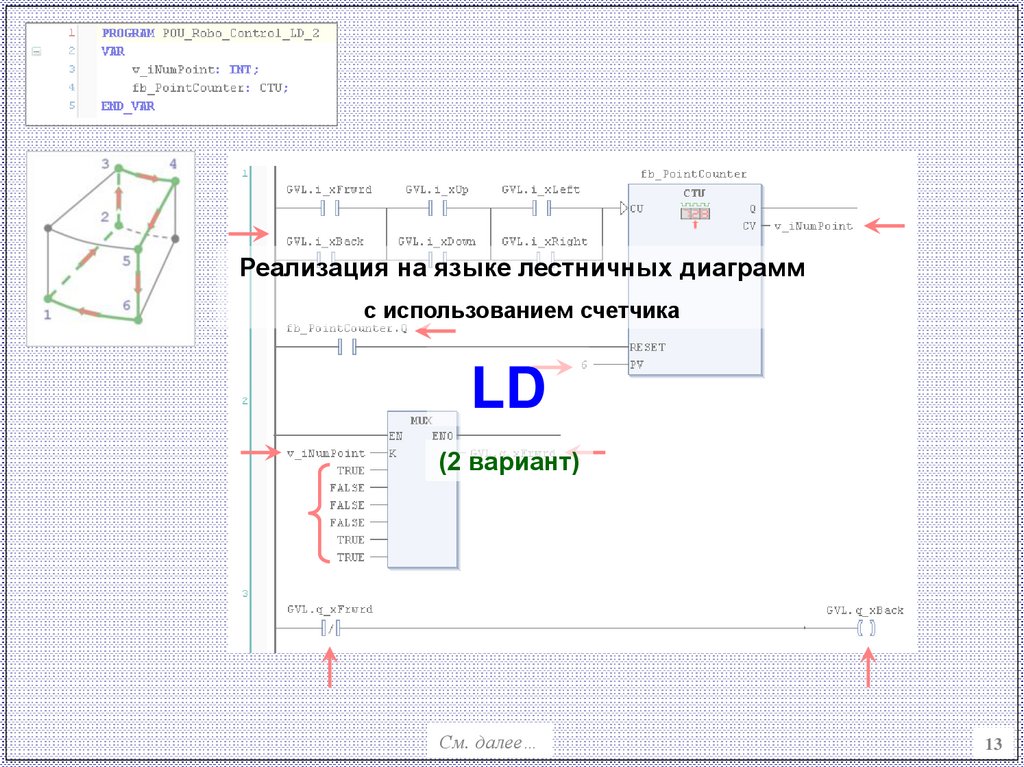
13.
Реализация на языке лестничных диаграммс использованием счетчика
LD
(2 вариант)
См. далее…
13
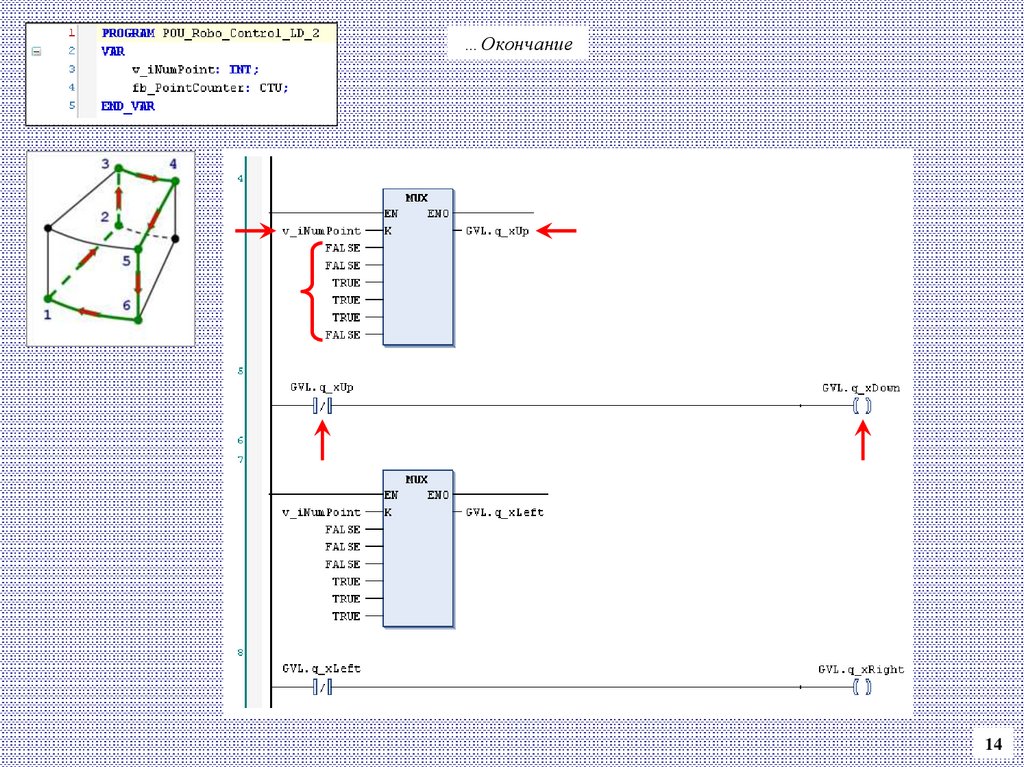
14.
…Окончание14
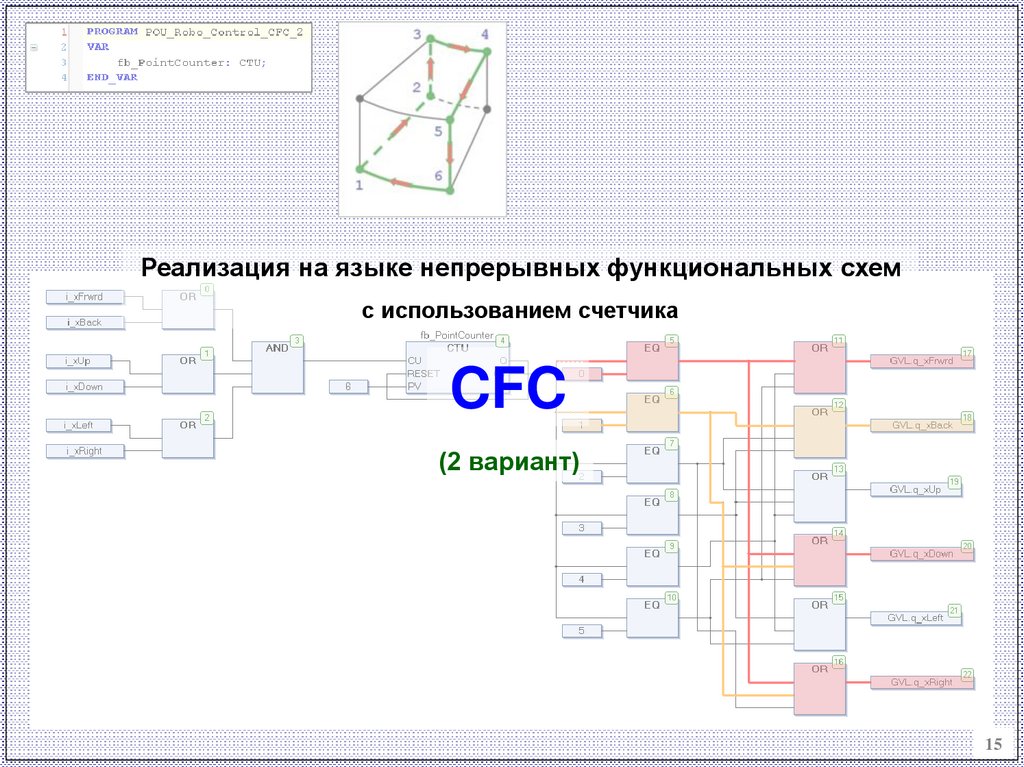
15.
Реализация на языке непрерывных функциональных схемс использованием счетчика
CFC
(2 вариант)
15
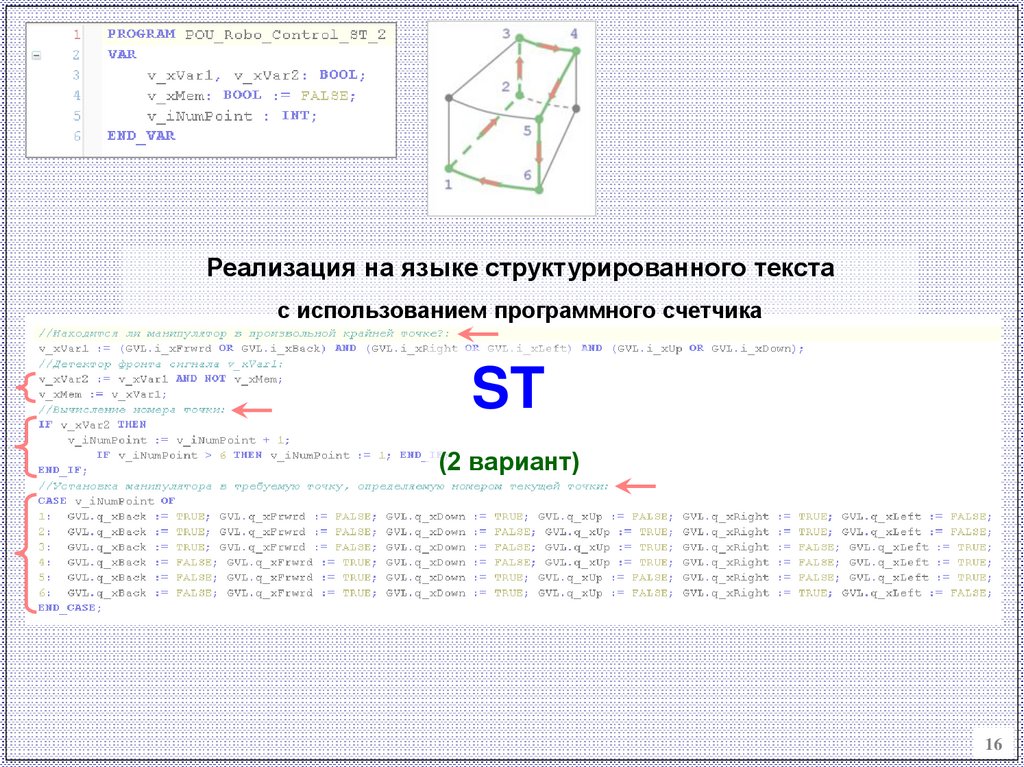
16.
Реализация на языке структурированного текстас использованием программного счетчика
ST
(2 вариант)
16
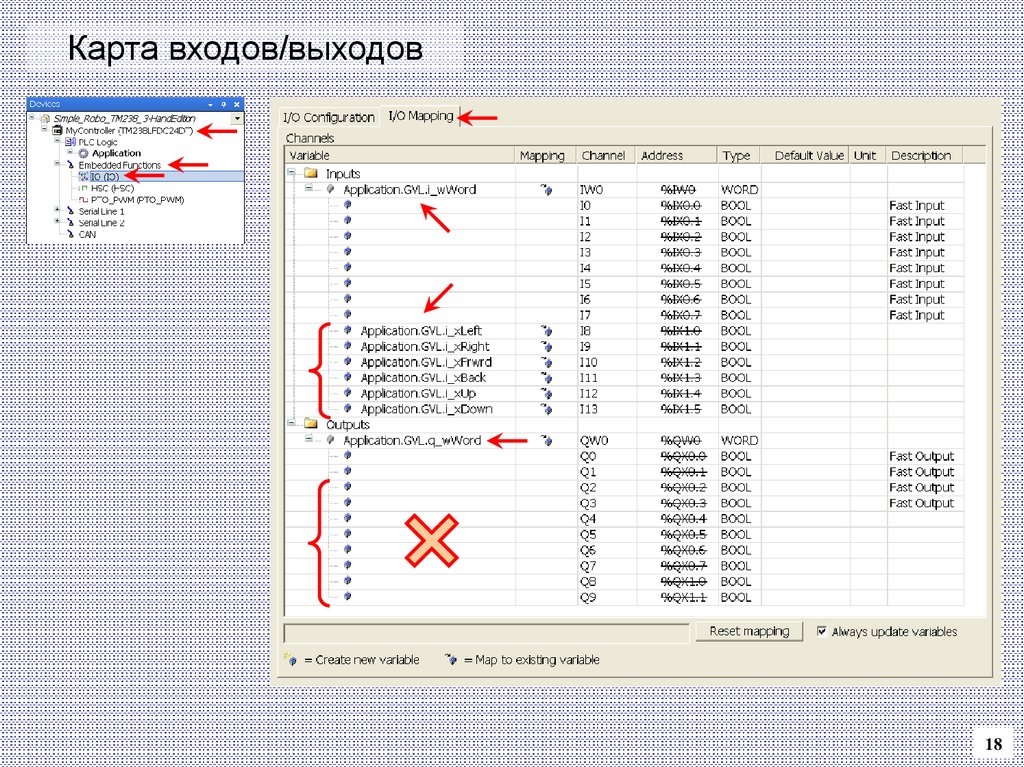
17. Дополнительные варианты реализации
• Используются глобальные переменныевходов/выходов типа WORD;
• Возможно использование вспомогательных
локальных переменных и функциональных блоков;
• При попадании в точку траектории увеличиваем
значение счетчика номера текущей точки;
• В соответствии с номером текущей точки задаем
движение к следующей точке траектории.
17
18.
Карта входов/выходов18
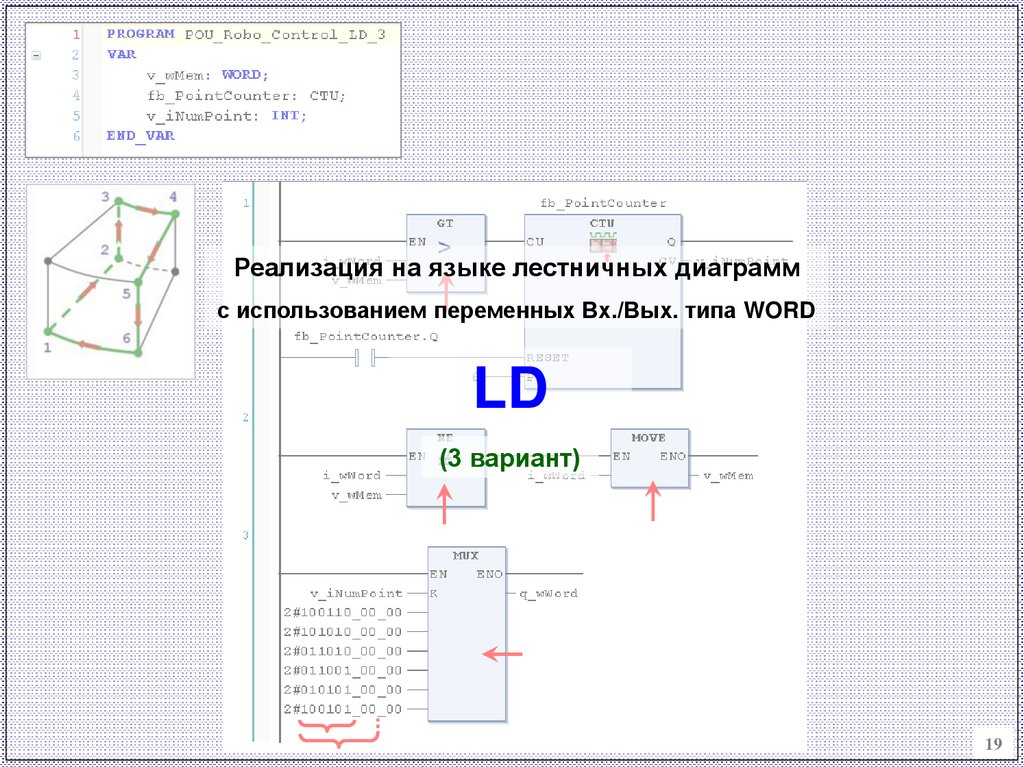
19.
Реализация на языке лестничных диаграммс использованием переменных Вх./Вых. типа WORD
LD
(3 вариант)
19
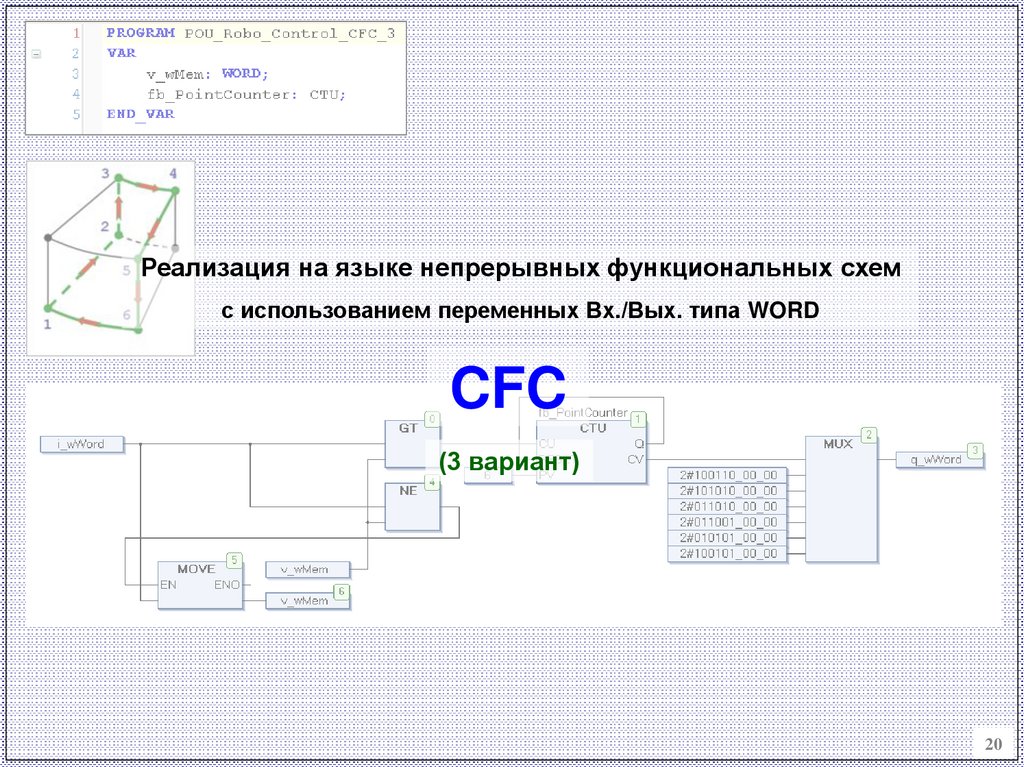
20.
Реализация на языке непрерывных функциональных схемс использованием переменных Вх./Вых. типа WORD
CFC
(3 вариант)
20
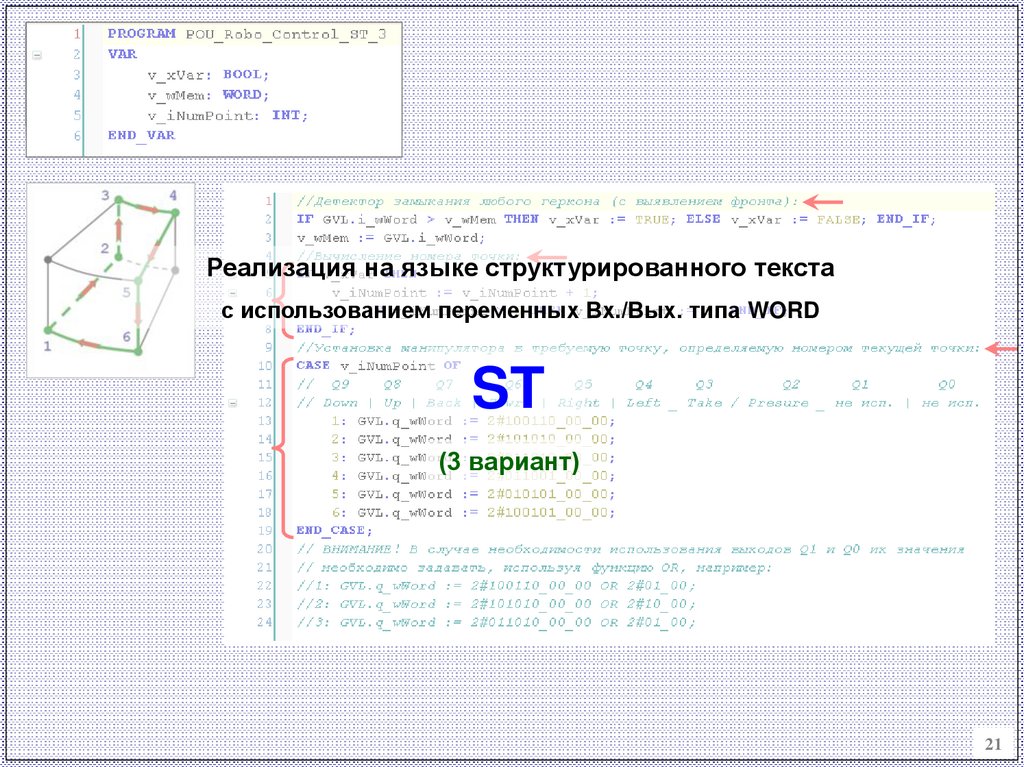
21.
Реализация на языке структурированного текстас использованием переменных Вх./Вых. типа WORD
ST
(3 вариант)
21
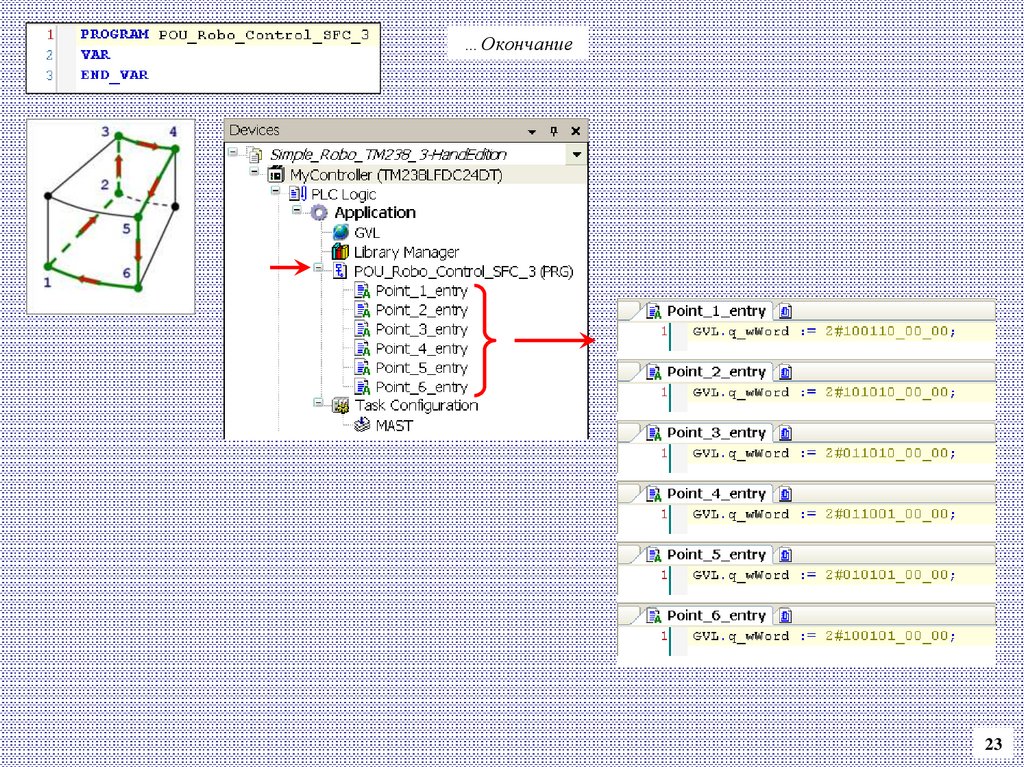
22.
Реализация на языке диаграмм состоянийс использованием переменных Вх./Вых. типа WORD
SFC
(3 вариант)
См. далее…
22
23.
…Окончание23
24. Задание
• Составить программы для обеспечения движениясхвата манипулятора по заданной траектории;
• По требованию преподавателя реализовать
движение схвата по разветвленной траектории;
• По требованию преподавателя реализовать
возвратно-поступательное движение схвата по
разомкнутой траектории.
24