











")


 Информатика
ИнформатикаПохожие презентации:










Моделирование цифровых систем управления самолетом
1. Моделирование цифровых систем управления самолетом.
ГРИГОРЬЕВ В.А.ВЕРСИЯ 2018
1
2. Содержание
1. Структурная схема цифровой системыуправления автопилотом самолета с
учетом нелинейных составляющих.
2. Схема сборки имитационной модели ИМ.
3. Цифровые регуляторы. Моделирование.
ВЕРСИЯ 2018
2
3.
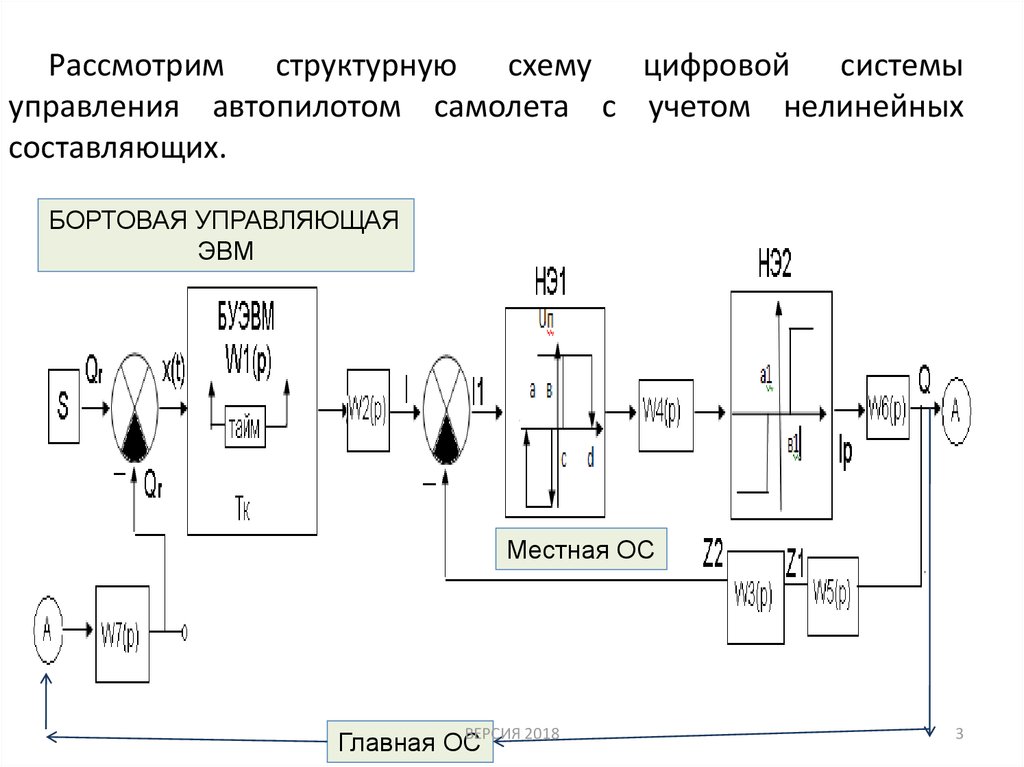
Рассмотрим структурную схему цифровой системыуправления автопилотом самолета с учетом нелинейных
составляющих.
БОРТОВАЯ УПРАВЛЯЮЩАЯ
ЭВМ
Местная ОС
ВЕРСИЯ 2018
Главная ОС
3
4.
ВЕРСИЯ 20184
5.
• Система управления содержит задатчиккурса S, формирующий заданное значение
курса самолета Qзадг .
• Блок сравнения формирует сигнал ошибки
x(t) как разность между заданным значением
и измеренным значением
x(t) = Qзадг - Qг
• где Qг – измеренное значение курса.
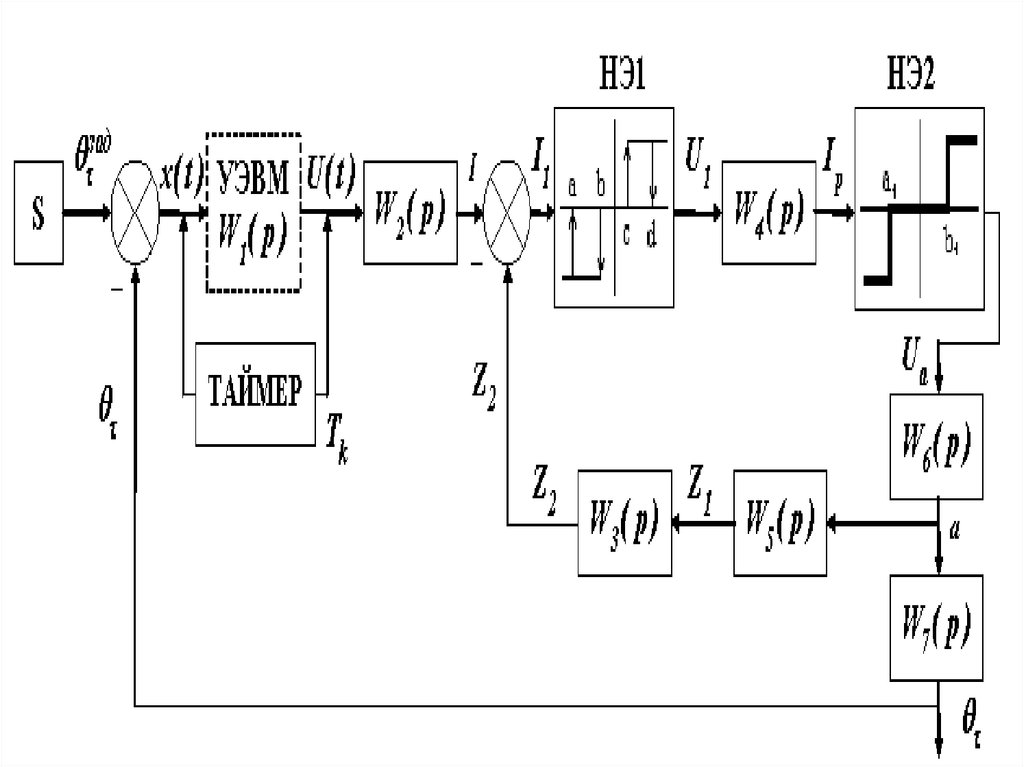
Схема включает бортовую управляющую
машину
БУЭВМ,
которая
реализует
дискретный алгоритм управления, для
формирования управляющего воздействия на
ВЕРСИЯ 2018
5
6.
интервале квантования Тк, где U(t) –управляющее
воздействие
на
исполнительные устройства самолета.
Таймер УЭВМ с интервалом квантования Тк
реализует подключение ЭВМ с помощью АЦП
и ЦАП.
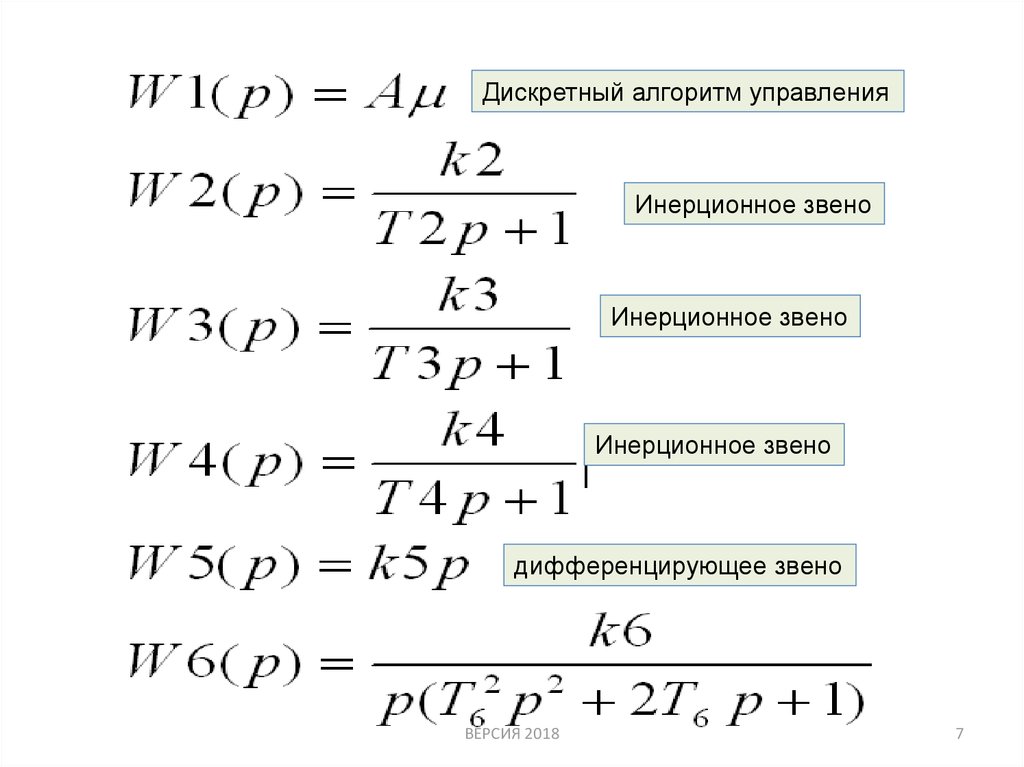
На основании анализа динамических
свойств конкретных элементов входящих в
систему
управления
получены
разработчиками их следующие передаточные
функции :
ВЕРСИЯ 2018
6
7.
Дискретный алгоритм управленияИнерционное звено
Инерционное звено
Инерционное звено
дифференцирующее звено
ВЕРСИЯ 2018
7
8.
• При программировании реальной моделисистемы
необходимо
моделировать
линейную часть системы (инерционные
звенья), например, методом Эйлера или
модифицированным методом Эйлера.
• Колебательные звенья приводятся к
системам дифференциальных уравнений
первого порядка и решаются методом РунгеКутта.
ВЕРСИЯ 2018
8
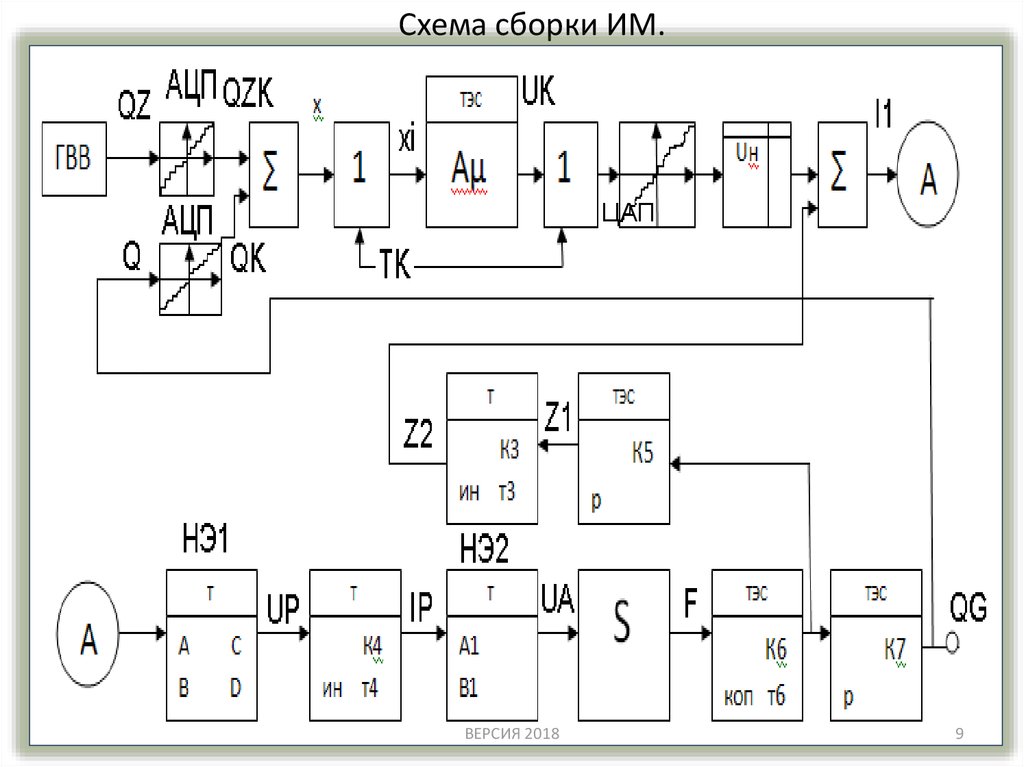
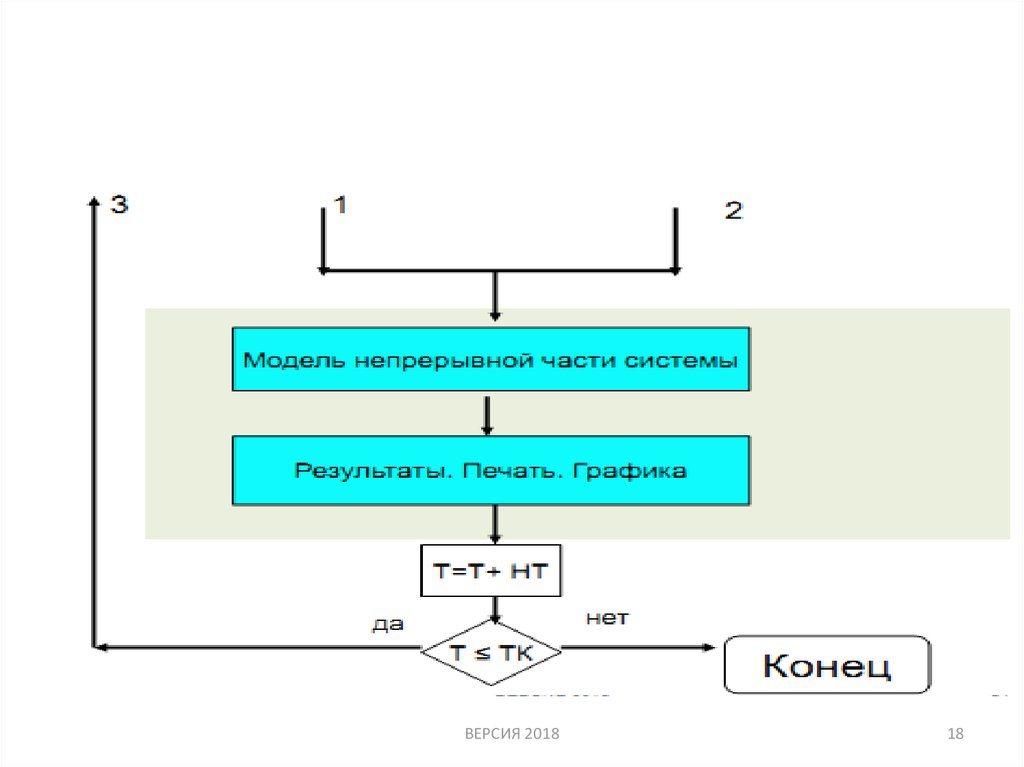
9.
Схема сборки ИМ.ЦАП
ВЕРСИЯ 2018
9
10. Второй вариант сборки модели
QGZПИД
QG
QG
ВЕРСИЯ 2018
10
11. 3. Цифровые регуляторы
Внепрерывных системах широко используются PIDрегуляторы, которые представляются идеализированным
уравнением:
• где: KP - коэффициент усиления пропорционального
канала; TIx - постоянная времени интегрального канала
(ВРЕМЯ ИЗОДРОМА); TDx - постоянная времени
дифференциального канала (ВРЕМЯ ПРЕДВОРЕНИЯ).
ВЕРСИЯ 2018
11
12.
• Для малых периодов дискретизации Tц (ИНТЕРВАЛАКВАНТОВАНИЯ) уравнение может быть преобразовано в
разностное без существенной потери в точности.
• Непрерывное интегрирование может быть представлено
с помощью метода прямоугольников , или метода
трапеций .
• Используем метод прямоугольников для аппроксимации
непрерывного интеграла и запишем PID-закон в
дискретном виде:
ВЕРСИЯ 2018
12
13.
В результате получен нерекуррентный (позиционный)алгоритм управления, который требует сохранения всех
предыдущих значений сигнала ошибки x[i], и в котором
каждый раз заново вычисляется управляющий сигнал
u[n].
• ЭТО ТРЕБУЕТ ЗНАЧИТЕЛЬНОЙ ПАМЯТИ (для хранения
массива Х) И ВРЕМЕНИ НА РАССЧЁТ АЛГОРИТМА
УПРАВЛЕНИЯ.
Для реализации программ закона регулирования на ЦВМ
более удобным является рекуррентный алгоритм.
• Он характеризуется тем, что для вычисления текущего
значения сигнала u[n] используется его предыдущее
значение u[n-1] и поправочный коэффициент, не
требующий существенных вычислительных затрат.
• Определим его:
ВЕРСИЯ 2018
13
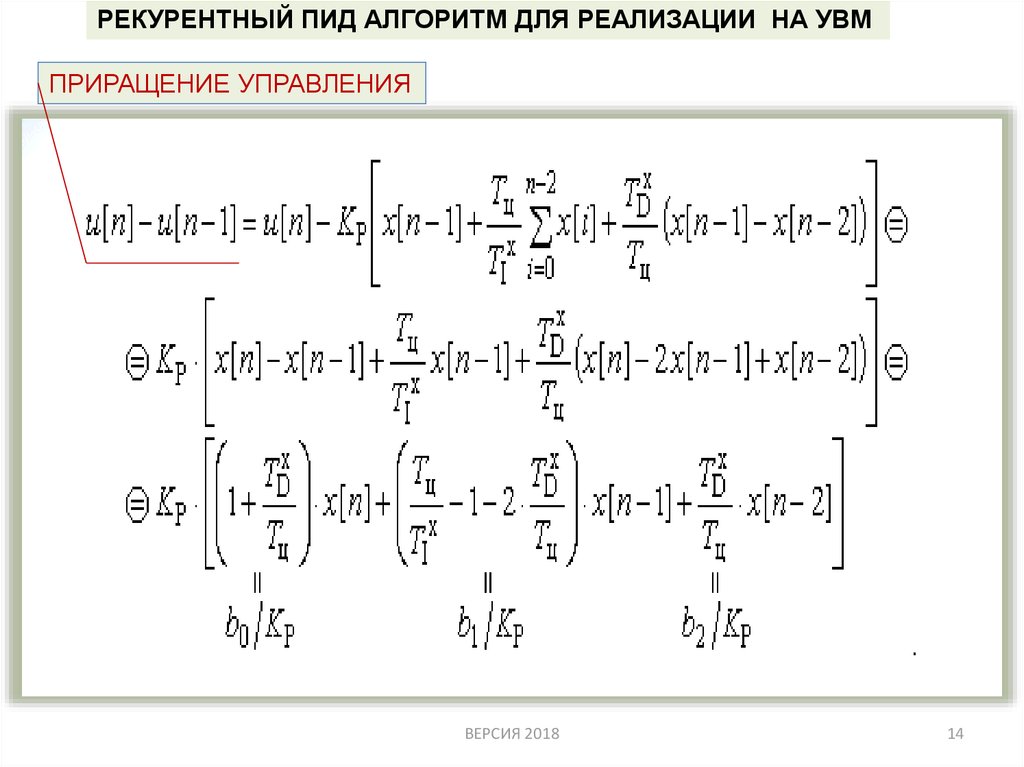
14.
РЕКУРЕНТНЫЙ ПИД АЛГОРИТМ ДЛЯ РЕАЛИЗАЦИИ НА УВМПРИРАЩЕНИЕ УПРАВЛЕНИЯ
ВЕРСИЯ 2018
14
15. ОПТИМИЗАЦИЯ РЕЖИМА СТАБИЛИЗАЦИИ
ОПТИМАЛЬНЫЙ ПРОЦЕСС БЕЗ УЧЕТА ОГРАНИЧЕНИЙИ СУЩЕСТВЕННЫХ НЕЛИНЕЙНОСТЕЙ
ОТКЛОНЕНИЕ ОТ КУРСА при координатных возмущениях
ВРЕМЯ
СЕК
ВЕРСИЯ 2018
15
16. ОПТИМИЗАЦИЯ РЕЖИМА СТАБИЛИЗАЦИИ
Х2- ПРОИЗВОДНАЯФАЗОВЫЙ ПОРТРЕТ ОПТИМАЛЬНЫЙ
ВЕРСИЯ 2018
Х1- ОШИБКА
16
17. Использование рекуррентного алгоритма для расчёта управляющего воздействия
ВЕРСИЯ 201817
18.
ВЕРСИЯ 201818
19.
Управление – это прежде всего информационный процесс,предполагающий
выполнение
функций
сбора,
обработки и анализа информации, её передачи и
хранения,
необходимых
для
выработки
соответствующих управленческих решений.
Современные управляющие системы являются сложными,
многофункциональными,
многорежимными,
распределенными системами.
Их базовую часть составляют логико-вычислительные
средства, специально предназначенные для решения
задач управления, обеспечивающие оптимальные (или
близкие к ним) режимы работы системы управления.
Такие средства называют управляющими электронными
вычислительными
машинами
(УЭВМ),
представляющими
собой
специализированные
вычислительные машины, используемые в качестве
центрального звена управляющей системы.
ВЕРСИЯ 2018
19
20. Обобщённая схема системы управления
ЛПР - лицо принимающее решенияВЕРСИЯ 2018
20
21. Функциональная схема системы управления
ВЕРСИЯ 201821
22. Управляющих ЭВМ и комплексы
Управляющих ЭВМ и комплексы - это программно- техническиекомплексы (ПТК), включающие в себя программируемые
контроллеры – управляющие устройства и инструментальные
программные системы для разработки и реализации
программно-аппаратного обеспечения всех уровней системы.
Программируемые контроллеры (ПРК) – это основа современных
управляющих систем, т.к. именно их структуры, в том числе и
сетевые,
оснащенные соответствующим системным и
прикладным ПО, выполняют все функции управляющих
вычислительных машин и комплексов, а также реализуют ряд
новых функций и возможностей.
ВЕРСИЯ 2018
22
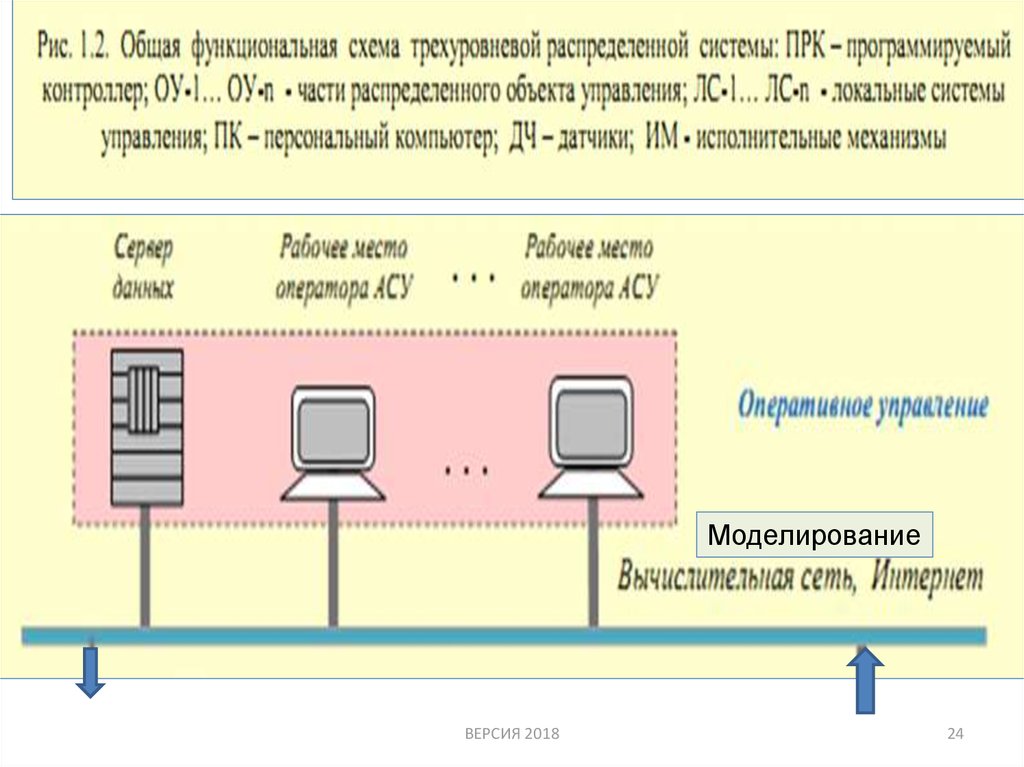
23. Программно-технические комплексы (ПТК)
• Выше было отмечено, что при разработкелогиковычислительных управляющих средств
необходимо
опираться на современные программно-технические
комплексы, сетевые и информационные технологии,
подобные средства представляют собой многоуровневую
иерархическую систему (рис.).
Моделирование:
• Одного контура управления с учётом квантования;
• Всех контуров управления ОУ с учетом дисциплины
обслуживания;
• Промышленной сети контроллеров;
• Информационно управляющей системы;
• Систем поддержки принятия решений.
ВЕРСИЯ 2018
23
24.
МоделированиеВЕРСИЯ 2018
24
25. Первый и второй уровни
МоделированиеВЕРСИЯ 2018
25
26. Взаимодействие компонентов УВК
ВЕРСИЯ 201826