









 Физика
ФизикаПохожие презентации:


")







Принципы измерения координат
1.
Санкт-Петербургский государственный университетаэрокосмического приборостроения
Программа дополнительной профессиональной
подготовки
«Радиолокационные системы и устройства
радиолокации»
Дисциплина №1
Теория и техника радиолокации
2. Лекция №4 ПРИНЦИПЫ ИЗМЕРЕНИЯ КООРДИНАТ
ЛЕКЦИЯ №4ПРИНЦИПЫ ИЗМЕРЕНИЯ КООРДИНАТ
Учебные вопросы:
1. Принцип измерения скорости
2. Неоднозначность измерения скорости. Слепая скорость.
3. Принцип измерения дальности
4. Слепые дальности и меры борьбы с ними
3. 1. Принцип измерения скорости
1. ПРИНЦИП ИЗМЕРЕНИЯ СКОРОСТИСкорость цели может быть определена по
величине доплеровского сдвига частоты сигнала,
возникающего
при
отражении
сигнала
от
движущегося объекта
FД=2VРАД/ λ где: VРАД - радиальная составляющая
скорости объекта, λ - длина волны;
Для этого используют приемник, имеющий
несколько каналов корреляционной обработки, для
каждого из которых создается эталонный сигнал с
определенными частотными параметрами.
Набор эталонных сигналов должен перекрывать
весь диапазон изменения частоты входных
сигналов.
4.
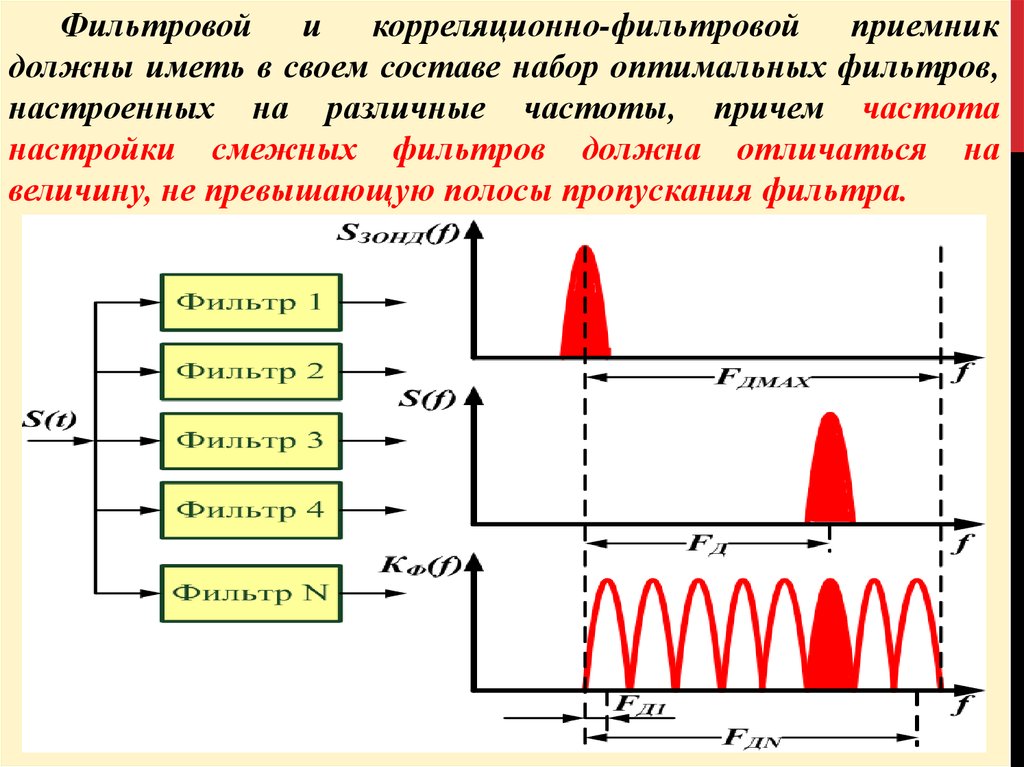
Фильтровой и корреляционно-фильтровой приемникдолжны иметь в своем составе набор оптимальных фильтров,
настроенных на различные частоты, причем частота
настройки смежных фильтров должна отличаться на
величину, не превышающую полосы пропускания фильтра.
5.
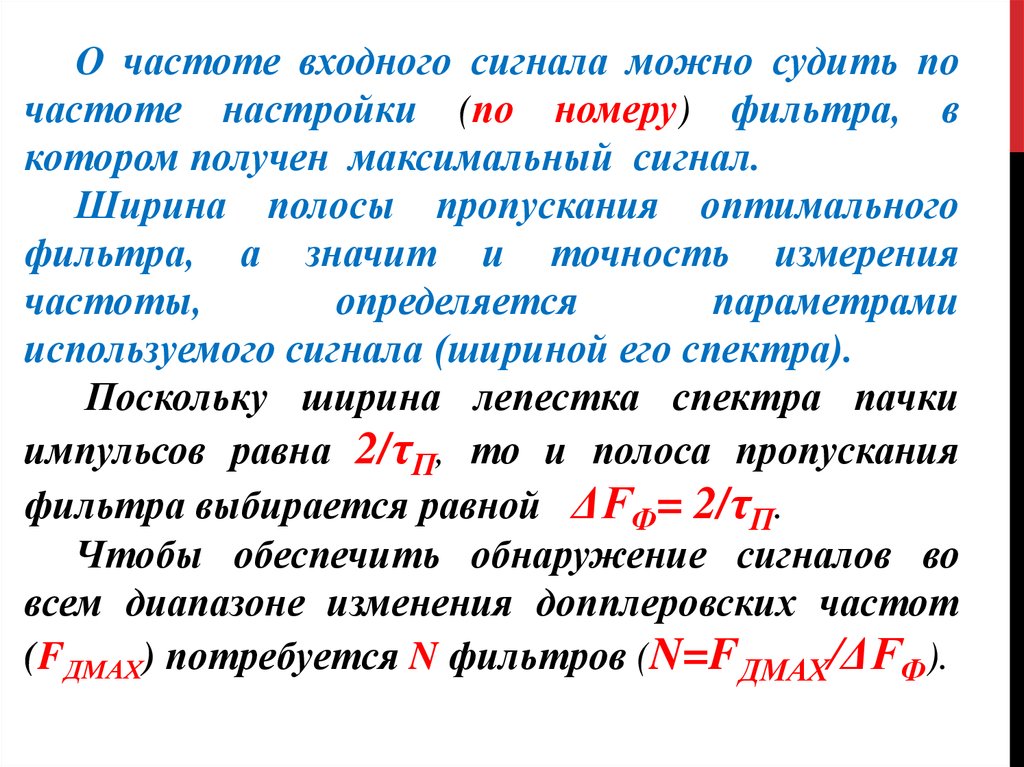
О частоте входного сигнала можно судить почастоте настройки (по номеру) фильтра, в
котором получен максимальный сигнал.
Ширина полосы пропускания оптимального
фильтра, а значит и точность измерения
частоты,
определяется
параметрами
используемого сигнала (шириной его спектра).
Поскольку ширина лепестка спектра пачки
импульсов равна 2/τП, то и полоса пропускания
фильтра выбирается равной ΔFФ= 2/τП.
Чтобы обеспечить обнаружение сигналов во
всем диапазоне изменения допплеровских частот
(FДMAX) потребуется N фильтров (N=FДMAX/ΔFФ).
6.
7.
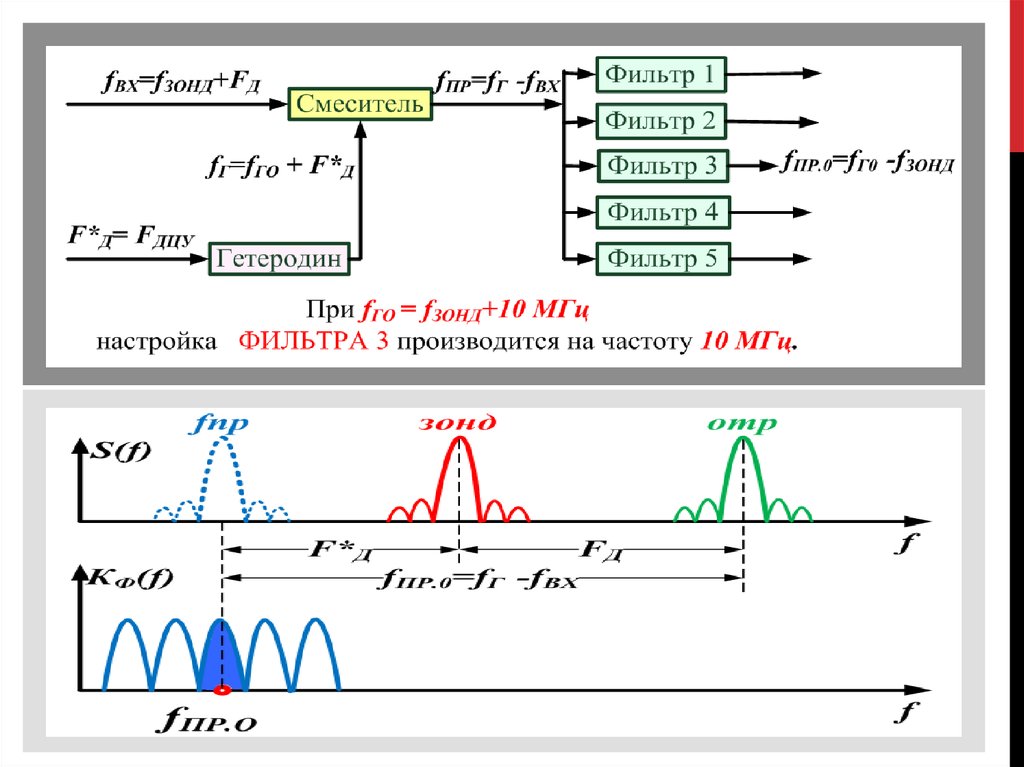
Центральныйфильтр
гребенки
настраивается на промежуточную частоту
fПР.О = fГО - fЗОНД, за измеренное значение FД
принимается величина F*Д, при которой сигнал
попадет в центральный фильтр гребенки.
Величина F*Д может быть получена от
внешних источников (F*Д = FДЦУ). Количество
фильтров в гребенке при этом определяется
точностью
целеуказания
(максимальная
ошибка ЦУ по скорости не должна превышать
±1/2 n ΔFФ ).
8.
Если максимальный сигнал получен вцентральном
фильтре,
то
ошибка
целеуказания нулевая.
Если ошибка целеуказания отлична от 0,
т.е. сигнал наблюдается в одном из
периферийных фильтров, ее устраняют
изменяя частоту гетеродина (т.е. F*Д) до
тех пор, пока сигнал не окажется в
центральном фильтре.
Таким образом будет получено оценочное
значение FД с точностью в 1/2 полосы
пропускания фильтра.
9. 2.НЕОДНОЗНАЧНОСТЬ ИЗМЕРЕНИЯ СКОРОСТИ. СЛЕПАЯ СКОРОСТЬ
10.
Решение проблемы обнаружения сигнала приполном
отсутствии
информации
о
цели
обеспечивается за счет использования в качестве
зондирующего сигнала пачки импульсов с низкой
частотой повторения F*ПОВТ. При этом диапазон
однозначного измерения скорости сокращается в N/n
раз, но зато при любом значении FД в полосу
пропускания гребенки из n фильтров попадает один из
лепестков спектра отраженного от цели сигнала.
Чтобы исключить возможность попадания в
фильтры сигналов для которых FД=0 (пассивных
помех), частота сигнала гетеродина fГ=fГО±F*Д в
устанавливается такой, чтобы лепестки спектра
пассивной помехи находились за пределами
суммарной полосы пропускания гребенки фильтров.
11.
Это обеспечивается при F*Д= (k+0,5)FПОВТ,где k - целое число. При этом суммарная
полоса пропускания гребенки фильтров
должна быть меньше расстояния между
соседними лепестками спектра (т.е. меньше
FПОВТ)).
12.
Так же в полосу пропускания гребенки фильтров не попадут и сигналыот целей, движущихся со скоростями, для которых FД кратна частоте
повторения импульсов. Такие скорости для которых FД = КFПОВТ
называют "слепыми скоростями". Обеспечить прием сигнала от этой
цели можно изменив частоту повторения импульсов. Перекрытие
"слепых" зон во всем диапазоне допплеровских частот обеспечивается
набором из m частот повторения.
Таким образом, для обнаружения цели при полном отсутствии
информации о ней, необходимо производить m - кратное зондирование
каждого углового направления с разной частотой повторения
импульсов в каждом зондировании.
13.
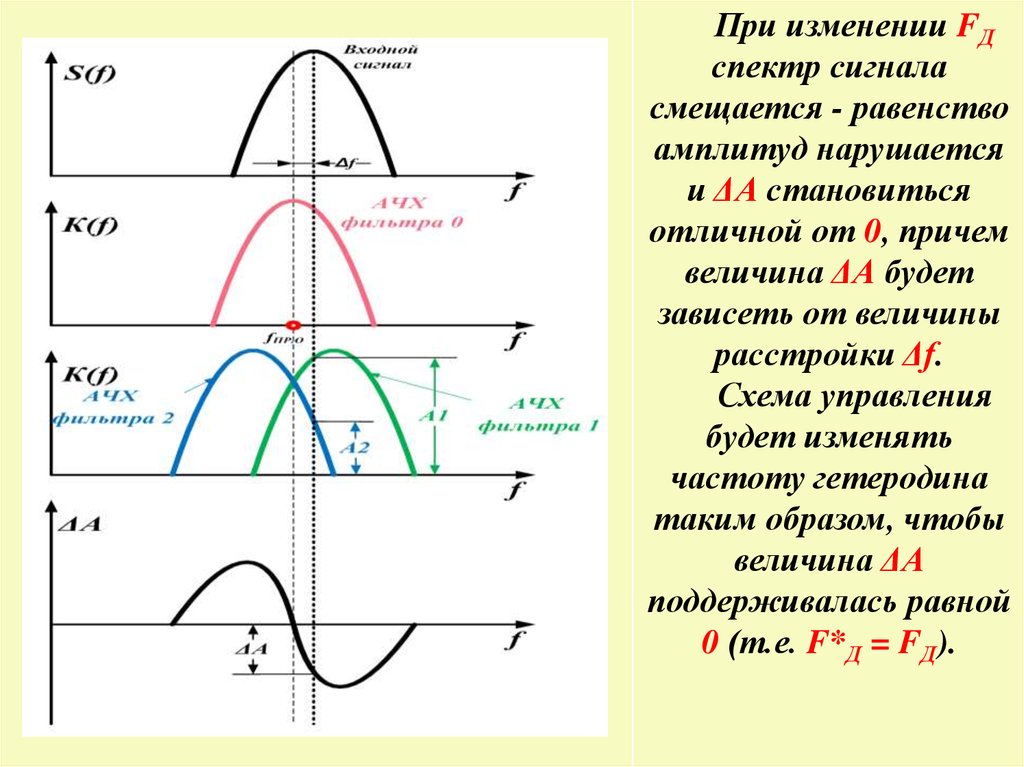
Для сопровождения цели по скорости используется следящаясистема, которая реализовывает слежение за частотой по
максимуму корреляционного интеграла (по максимуму сигнала на
выходе фильтра Ф0). В качестве измерительного инструмента
используется пара расстроенных относительно номинального
значения промежуточной частоты fПР.О фильтров Ф1 и Ф2, АЧХ
которых соответствует АЧХ оптимального фильтра Ф0.
14.
При изменении FДспектр сигнала
смещается - равенство
амплитуд нарушается
и ΔА становиться
отличной от 0, причем
величина ΔА будет
зависеть от величины
расстройки Δf.
Схема управления
будет изменять
частоту гетеродина
таким образом, чтобы
величина ΔА
поддерживалась равной
0 (т.е. F*Д = FД).
15.
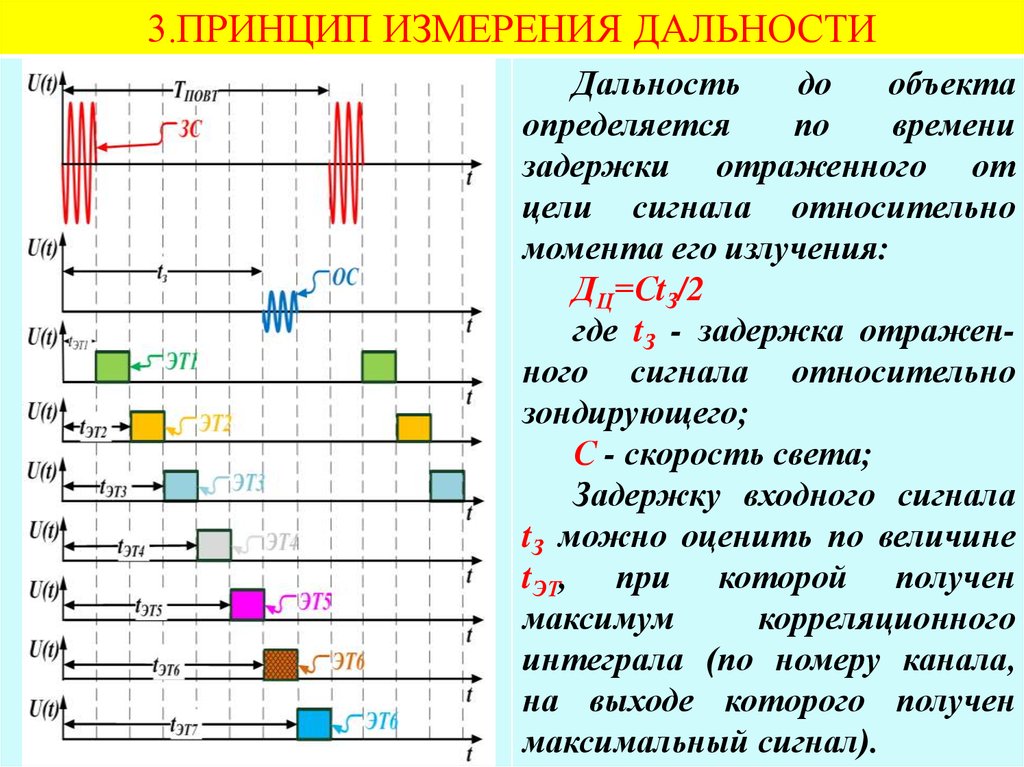
3.ПРИНЦИП ИЗМЕРЕНИЯ ДАЛЬНОСТИДальность
до
объекта
определяется
по
времени
задержки отраженного от
цели сигнала относительно
момента его излучения:
ДЦ=СtЗ/2
где tЗ - задержка отраженного сигнала относительно
зондирующего;
С - скорость света;
Задержку входного сигнала
tЗ можно оценить по величине
tЭТ, при которой получен
максимум
корреляционного
интеграла (по номеру канала,
на выходе которого получен
максимальный сигнал).
16.
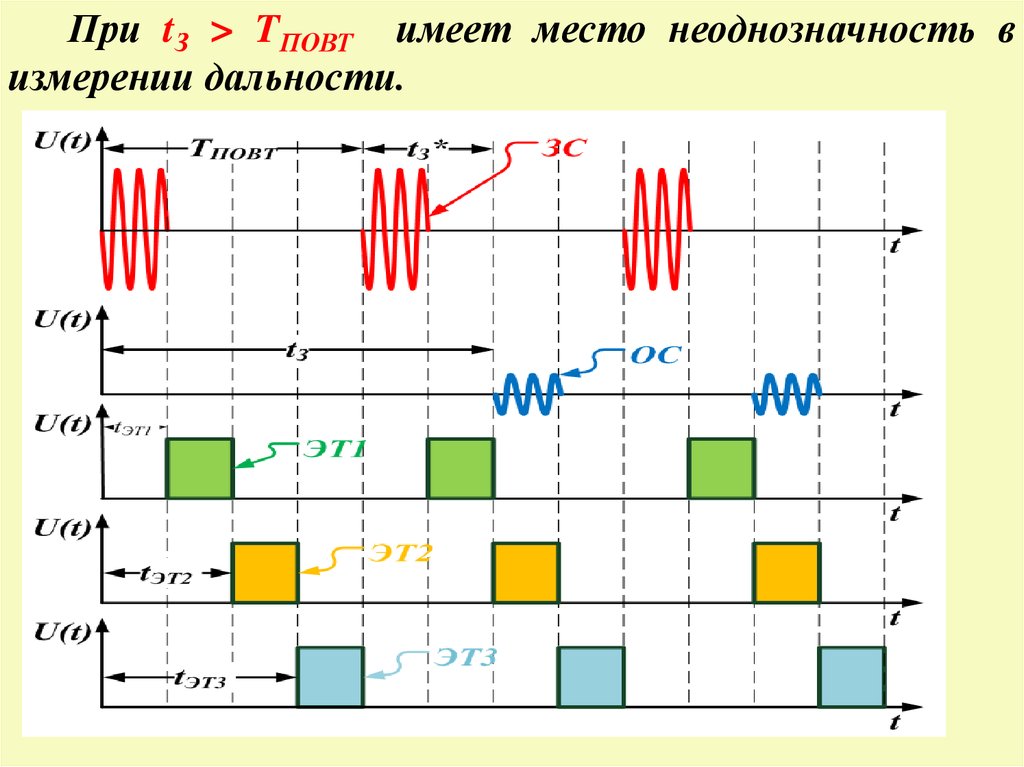
При tЗ > TПОВТ имеет место неоднозначность визмерении дальности.
17.
Набор эталонных сигналов должен полностьюперекрывать диапазон измерения, соответствующий периоду повторения излучаемых импульсов
ТПОВТ.
Необходимое для этого количество эталонных
сигналов (т.е. количество каналов приемника)
определяется соотношением:
N=КПЕР(ТПОВТ/τИ)-1
где КПЕР - коэффициент перекрытия импульсов.
Таким образом приемное устройство должно
иметь N каналов дальности в каждом из которых
установлено n скоростных фильтров.
18.
19. система для сопровождения цели по дальности
СИСТЕМА ДЛЯ СОПРОВОЖДЕНИЯ ЦЕЛИПО ДАЛЬНОСТИ
20.
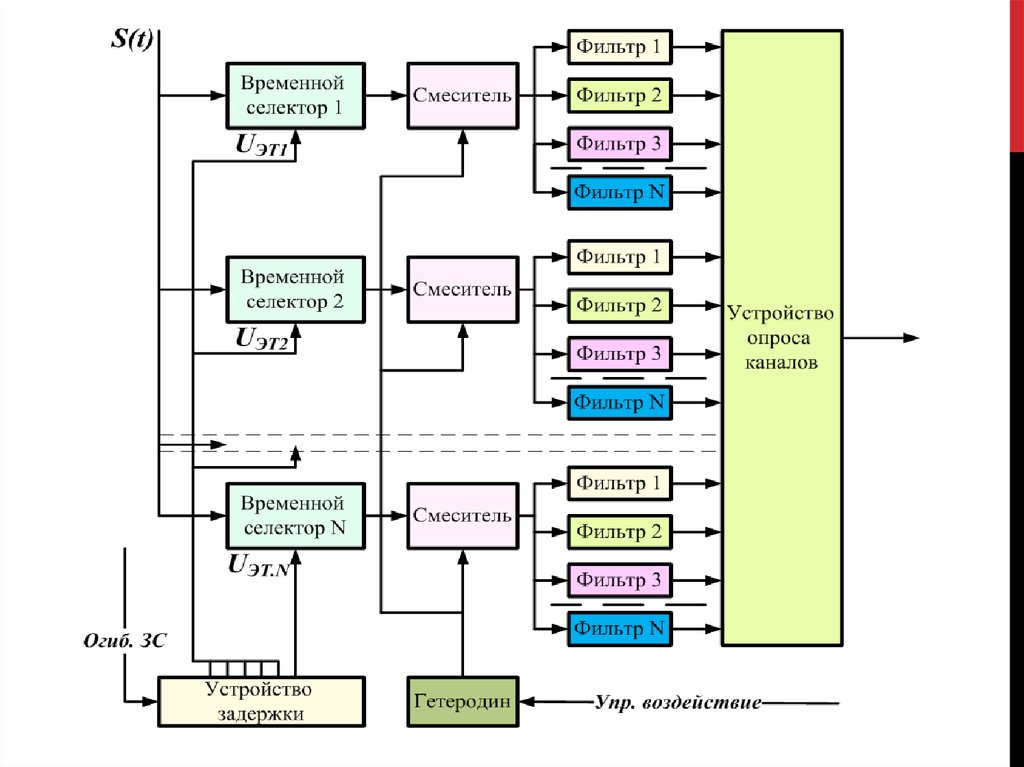
Следящая система дальности представляет собойкорреляционно-фильтровой
канал,
в
котором
формируется эталонный сигнал с изменяемой
относительно момента излучения задержкой tЭТ.
Задержка tЭТ должна устанавливаться такой, чтобы
получить максимум корреляционного интеграла, т.е.
максимальный сигнал на выходе КФК.
Для слежения за максимумом корреляционного
интеграла
используют
свойство
центральной
симметрии тела неопределенности во временной
области.
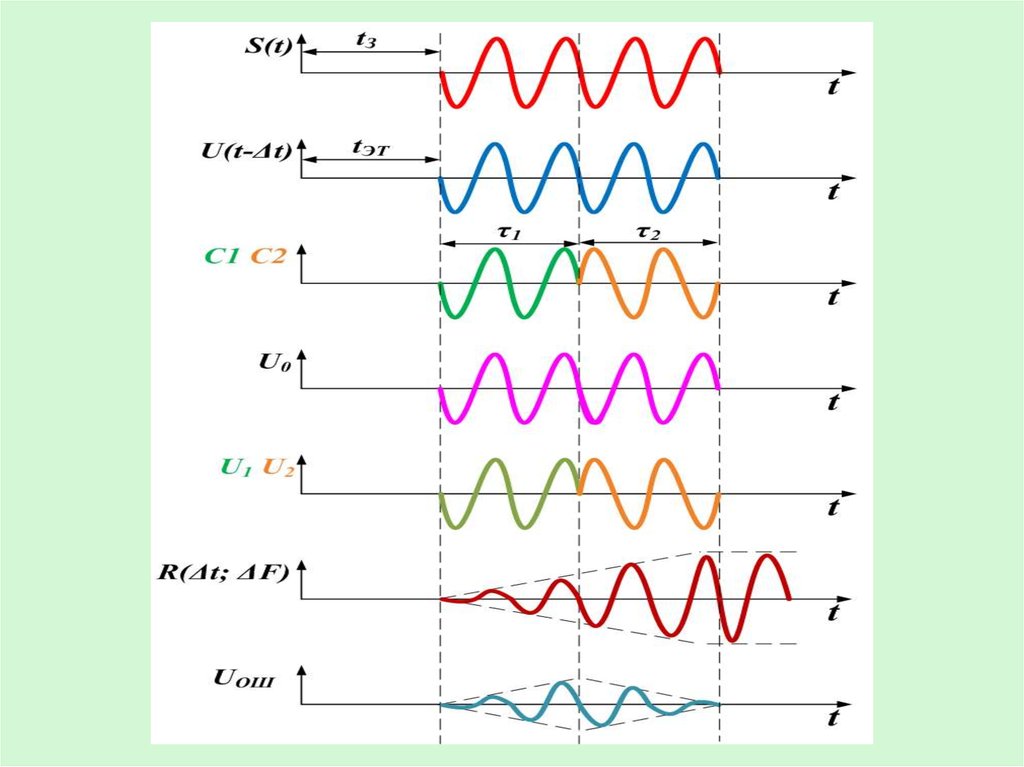
С этой целью в качестве эталонного сигнала
используют сдвоенные стробы С1 и С2, длительностью
τИ/2.
21.
22.
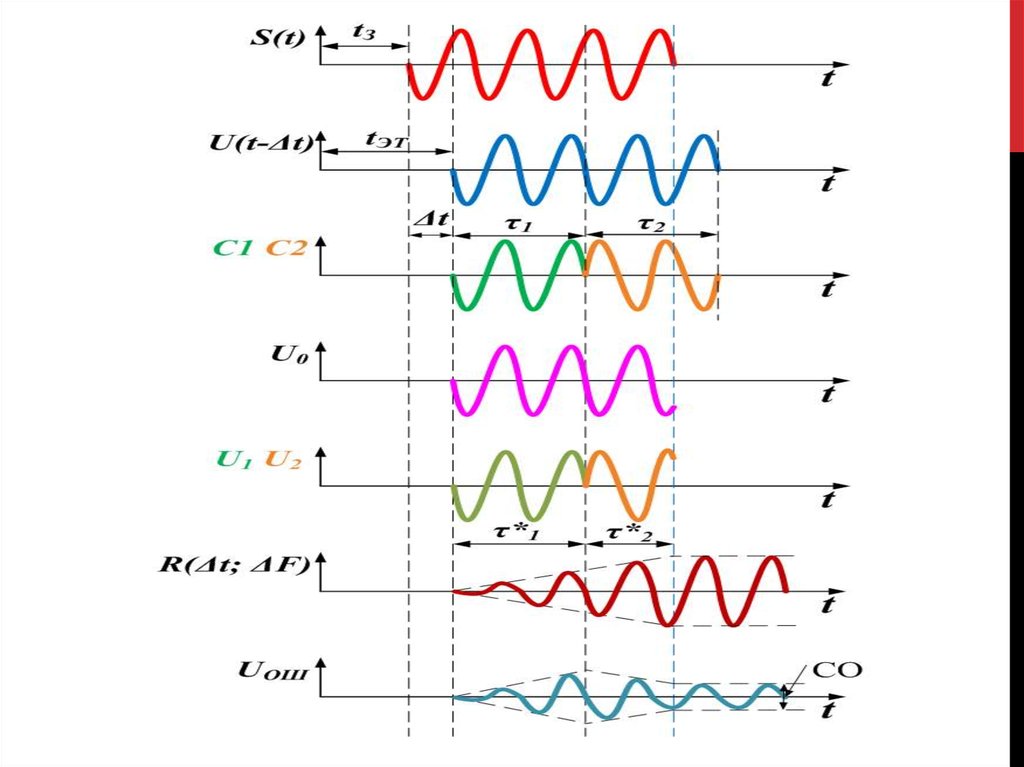
На выходе временного селектора будут получены дваимпульса (И1 и И2), длительность которых τ*1 и τ*2
зависит от степени перекрытия входного сигнала и
соответствующего строба. При совмещении стыка
стробов с центром тяжести сигнала τ1=τ2, а при
рассовмещении - равенство нарушается, причем
величина ошибки Δt = tЗ - tЭТ будет определяться
разностью τ*1-τ*2.
При воздействии импульса И1 в оптимальном
фильтре происходит накопление сигнала, причем его
амплитуда на выходе фильтра будет зависеть от
времени накопления, т.е. от длительности импульса
τ*1.
23.
Т.к импульс И2 имеет начальную фазу, отличающуюся на180 от начальной фазы импульса И1, то при его воздействии
(т.е. в течение интервала τ*2)
будет происходить
"гашение" сигнала ранее накопленного в фильтре.
По окончании действия
импульса И2 в фильтре
сохранится сигнал, амплитуда которого будет зависеть от
разности τ*1 - τ*2; при τ*1=τ*2 амплитуда сигнала будет
нулевой.
Наведение следящей системы осуществляется вводом в
схему формирования управляющего сигнала кода ДНАВ= ДЦУ ±
ΔД, где ΔД - задается оператором. Сигнала ошибки UОШ,
преобразовывается в цифровую форму в вычислительном
устройстве (ΔДОШ)
и
далее поступает в схему
формирования управляющего сигнала, где формируется код
Д=ДНАВ±ΔДОШI=ДЦ.
Исполнительным элементом следящей системы дальности
является устройство переменной задержки (УПЗ).
24.
25. 4. Слепые Дальности и меры борьбы с ними
4. СЛЕПЫЕ ДАЛЬНОСТИ И МЕРЫ БОРЬБЫ С НИМИВ
импульсных
РЛС,
сигналы от целей поступающие
в
момент
излучения
зондирующего
импульса
в
приемное
устройство
не
попадают.
tЗ=КТПОВТ
соответствующие
такой
задержке дальности называют
«слепыми».
Для различных периодов
повторения
импульсов
"слепыми"
будут
разные
участки дальности. Поэтому
обеспечить прием сигналов от
цели, находящейся в "слепой"
зоне можно, изменив период
повторения импульсов.
26. ПРИНЦИП УСТРАНЕНИЯ НЕОДНОЗНАЧНОСТИ В ИЗМЕРЕНИИ ДАЛЬНОСТИ.
Диапазон однозначного измерения дальностиопределяется расстоянием между соседними
максимумами
тела
неопределенности
по
временной оси, т.е. периодом повторения
импульсов. Определение однозначной дальности
до цели в рабочем диапазоне РЛС можно
обеспечить
применением
метода
многошкальных измерений («нониуса»). Суть
метода состоит в сопоставлении результатов
измерений, выполненных с помощью шкал с
разной ценой деления.
27.
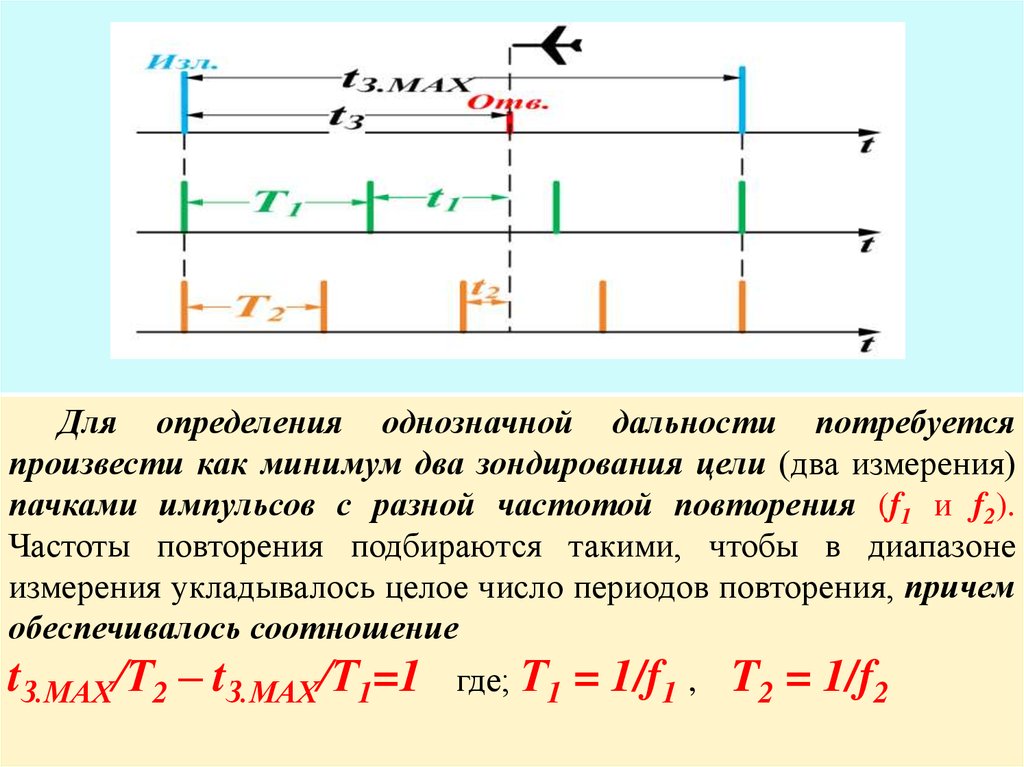
Для определения однозначной дальности потребуетсяпроизвести как минимум два зондирования цели (два измерения)
пачками импульсов с разной частотой повторения (f1 и f2).
Частоты повторения подбираются такими, чтобы в диапазоне
измерения укладывалось целое число периодов повторения, причем
обеспечивалось соотношение
tЗ.МАХ/Т2 – tЗ.МАХ/Т1=1
где; Т1
= 1/f1 , T2 = 1/f2
28.
Для произвольной дальности целизадержка
отраженного от нее сигнала на входе приемника будет
соответствовать:
- для частоты повторения f1:
tЗ = t1 + NT1
(#)
- для частоты повторения f2:
tЗ = t2 + KT2,
(#)
где t1 и t2 - задержка сигнала в пределах периода
повторения T1 и T2 (неоднозначная задержка); измерение t1 и
t2 обеспечивается многоканальным приемником.
N и К - целые числа.
Решение задачи определения однозначной (истинной)
дальности до цели сводится к определению N или К
29.
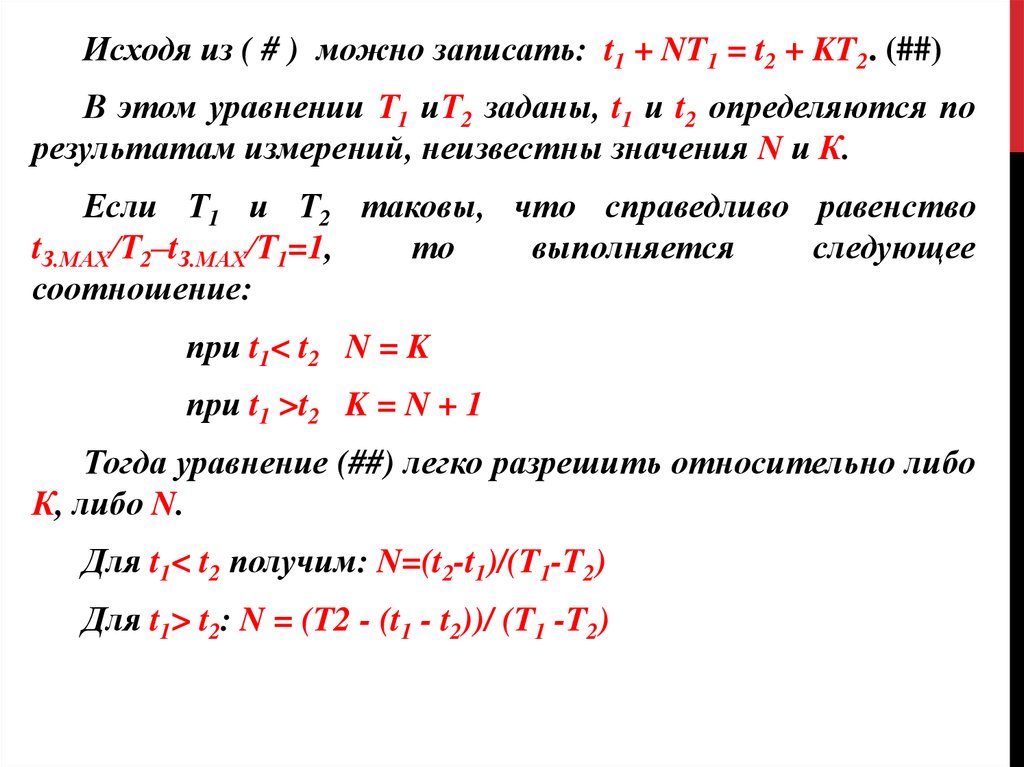
Исходя из ( # ) можно записать: t1 + NT1 = t2 + KT2. (##)В этом уравнении Т1 иТ2 заданы, t1 и t2 определяются по
результатам измерений, неизвестны значения N и К.
Если Т1 и Т2 таковы, что справедливо равенство
tЗ.МАХ/Т2–tЗ.МАХ/Т1=1,
то
выполняется
следующее
соотношение:
при t1< t2 N = K
при t1 >t2 K = N + 1
Тогда уравнение (##) легко разрешить относительно либо
К, либо N.
Для t1< t2 получим: N=(t2-t1)/(T1-T2)
Для t1> t2: N = (T2 - (t1 - t2))/ (T1 -T2)
30.
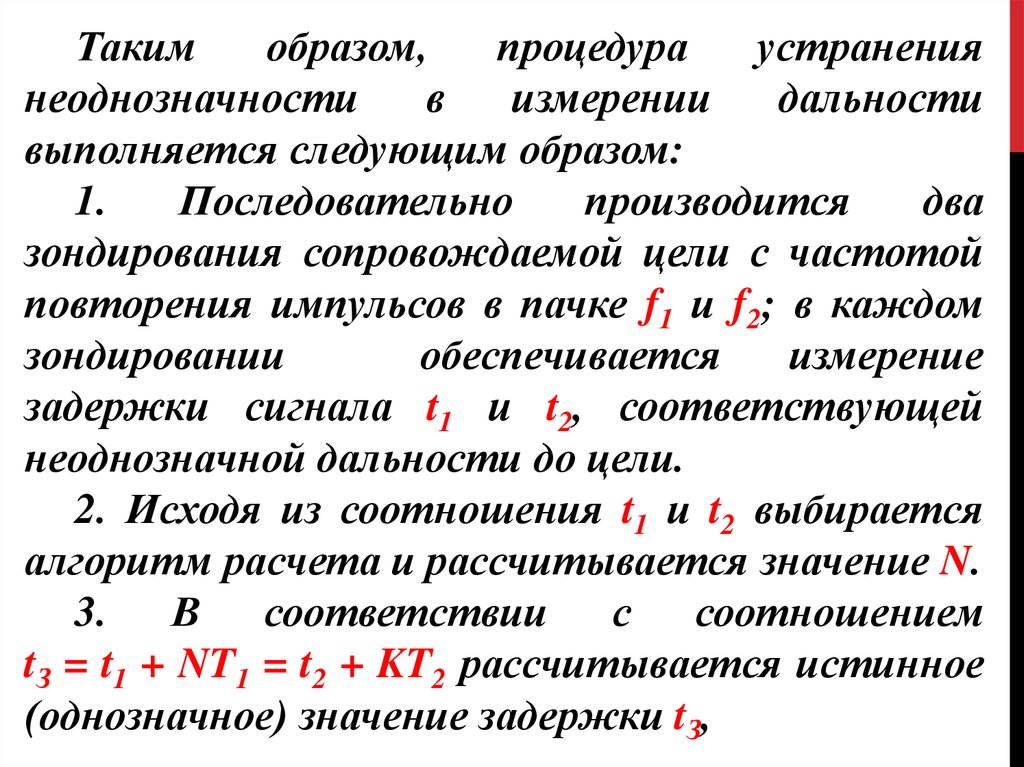
Такимобразом,
процедура
устранения
неоднозначности
в
измерении
дальности
выполняется следующим образом:
1.
Последовательно
производится
два
зондирования сопровождаемой цели с частотой
повторения импульсов в пачке f1 и f2; в каждом
зондировании
обеспечивается
измерение
задержки сигнала t1 и t2, соответствующей
неоднозначной дальности до цели.
2. Исходя из соотношения t1 и t2 выбирается
алгоритм расчета и рассчитывается значение N.
3. В соответствии с соотношением
tЗ = t1 + NT1 = t2 + KT2 рассчитывается истинное
(однозначное) значение задержки tЗ,
31.
Следует иметь в виду, что при невысокой точностиизмерения задержек t1 и t2 многоканальным приемником
истинная задержка tЗ может быть определена с ошибкой в один
или более периодов повторения, что недопустимо. Для
исключения возможной ошибки следует уменьшить ошибки
измерения, либо увеличить разность периодов повторения. При
увеличении же разности Т1 - Т2 вместо соотношения
(tЗ.МАХ/Т2 – tЗ.МАХ/Т1=1 ) получим:
tЗ.MAX / T2- tЗ.MAX / T1 = A ,
где А
= 2;3;4 .....
а значит в диапазоне измеряемой дальности будет А
интервалов неоднозначности.
32.
На практике для того, чтобы обеспечить определение N(т.е. устранение неоднозначности) без ошибки в требуемом
диапазоне измерения используют три измерительных
шкалы:
- основную (период повторения импульсов Т1 )
- нониусную «грубую» (период повторения импульсов Т2),
причем соотношение Т1 и Т2 обеспечивает выполнение
равенства (tЗ.МАХ/Т2 – tЗ.МАХ/Т1=1)
- нониусную «точную» (период повторения импульсов Т3),
причем соотношение Т1 и Т3 обеспечивает выполнение
соотношения tЗ.MAX / Т1 - tЗ.MAX / Т3 = A
Таким образом для устранения неоднозначности в
измерении
дальности
потребуется
произвести
три
зондирования цели с разной частотой повторения импульсов
(f1; f2; f3).
33.
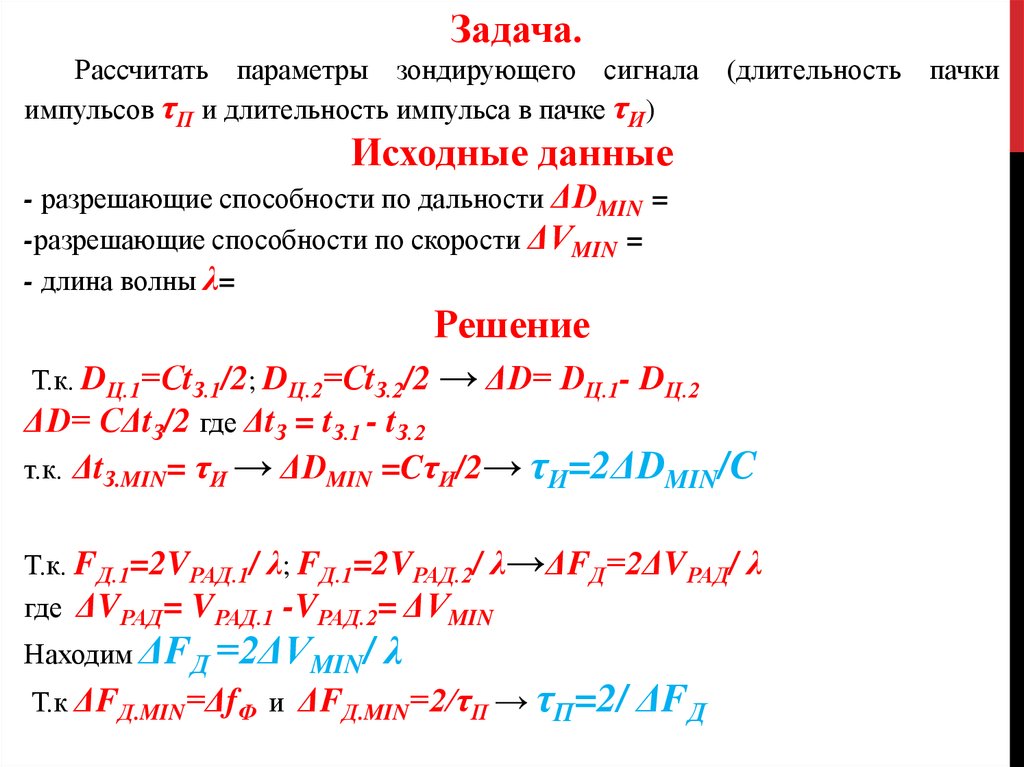
Задача.Рассчитать параметры зондирующего сигнала (длительность пачки
импульсов τП и длительность импульса в пачке τИ)
Исходные данные
- разрешающие способности по дальности ΔDMIN =
-разрешающие способности по скорости ΔVMIN =
- длина волны λ=
Решение
Т.к. DЦ.1=СtЗ.1/2; DЦ.2=СtЗ.2/2 → ΔD= DЦ.1- DЦ.2
ΔD= СΔtЗ/2 где ΔtЗ = tЗ.1 - tЗ.2
т.к. ΔtЗ.MIN= τИ → ΔDMIN =CτИ/2→ τИ=2ΔDMIN/C
Т.к. FД.1=2VРАД.1/ λ; FД.1=2VРАД.2/ λ→ΔFД=2ΔVРАД/ λ
где ΔVРАД= VРАД.1 -VРАД.2= ΔVMIN
Находим ΔFД =2ΔVMIN/
λ
Т.к ΔFД.MIN=ΔfФ и ΔFД.MIN=2/τП → τП=2/
ΔFД
34.
Изобразить радиолокационные сигналы во временной и частотной области(непрерывное колебание бесконечной длительности и одиночный радиоимпульса).
Изобразить радиолокационные сигналы во временной и частотной области
(одиночный видеоимпульс и импульс бесконечно малой длительности).
Изобразить радиолокационные сигналы во временной и частотной области
(когерентная пачка радиоимпульсов).
Изобразить схему корреляционного приемника. Дать определение когерентного
сигнала.
В чем выражается принцип неопределенности в радиолокации.
Требования к зондирующему сигналу. Требования к разрешающей способности и
точности измерений.
Изобразить схему и пояснить принцип корреляционно-фильтровой обработки сигнала.
Изобразить схему и пояснить принцип определения скорости цели в приемнике
осуществляющем корреляционно-фильтровую обработку сигнала.
Изобразить схему и пояснить принцип определения дальности до цели в приемнике
осуществляющем корреляционно-фильтровую обработку сигнала.
Неоднозначность измерения скорости. Слепая скорость. Причины возникновения и
способы решения данных проблем.
Принцип измерения дальности. Слепые дальности. Причины возникновения и способы
решения данных проблем.
Неоднозначность измерения дальности. Причины возникновения и способы решения
данных проблем.
35.
1.Изобразить радиолокационные сигналы во временной и частотной области(непрерывное колебание бесконечной длительности и одиночный радиоимпульса).
2.Изобразить радиолокационные сигналы во временной и частотной области
(одиночный видеоимпульс и импульс бесконечно малой длительности).
3.Изобразить радиолокационные сигналы во временной и частотной области
(когерентная пачка радиоимпульсов).
1.Изобразить схему и пояснить принцип корреляционно-фильтровой обработки
сигнала.
2.Изобразить схему и пояснить принцип определения скорости цели в приемнике
осуществляющем корреляционно-фильтровую обработку сигнала.
3.Изобразить схему и пояснить принцип определения дальности до цели в
приемнике осуществляющем корреляционно-фильтровую обработку сигнала.
1.Неоднозначность измерения скорости. Слепая скорость. Причины возникновения
и способы решения данных проблем.
2.Принцип измерения дальности. Слепые дальности. Причины возникновения и
способы решения данных проблем.
3.Неоднозначность измерения дальности. Причины возникновения и способы
решения данных проблем.