




 Физика
ФизикаПохожие презентации:
")









Эхометод измерения глубины
1.
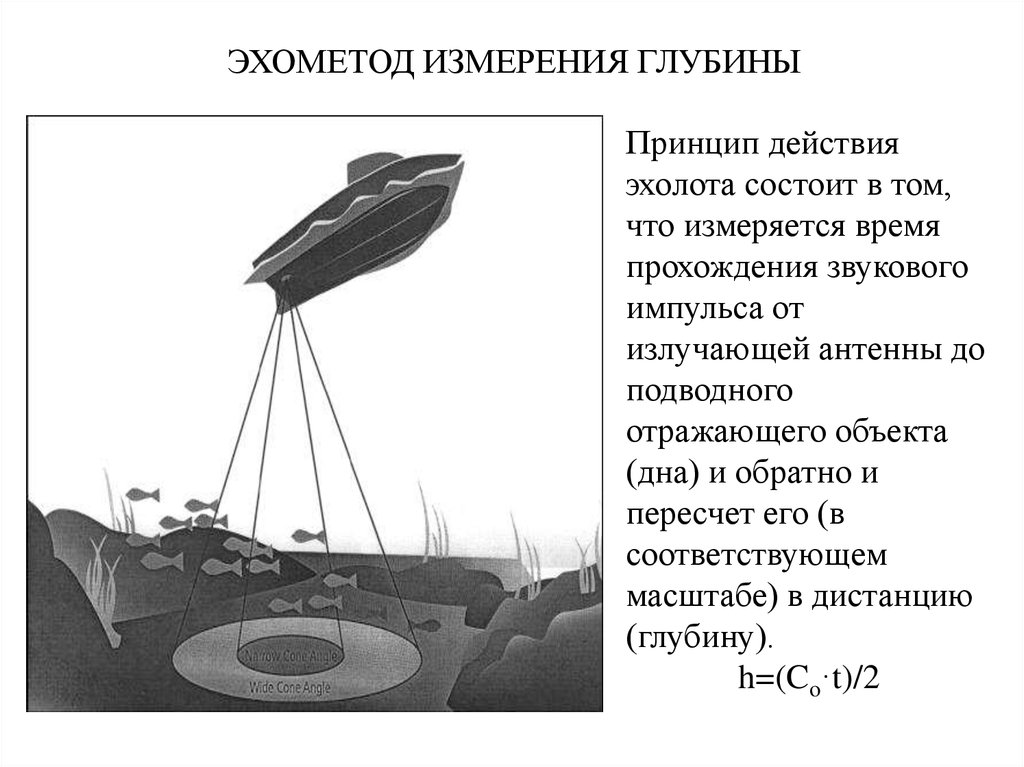
ЭХОМЕТОД ИЗМЕРЕНИЯ ГЛУБИНЫПринцип действия
эхолота состоит в том,
что измеряется время
прохождения звукового
импульса от
излучающей антенны до
подводного
отражающего объекта
(дна) и обратно и
пересчет его (в
соответствующем
масштабе) в дистанцию
(глубину).
h=(Co·t)/2
2.
3.
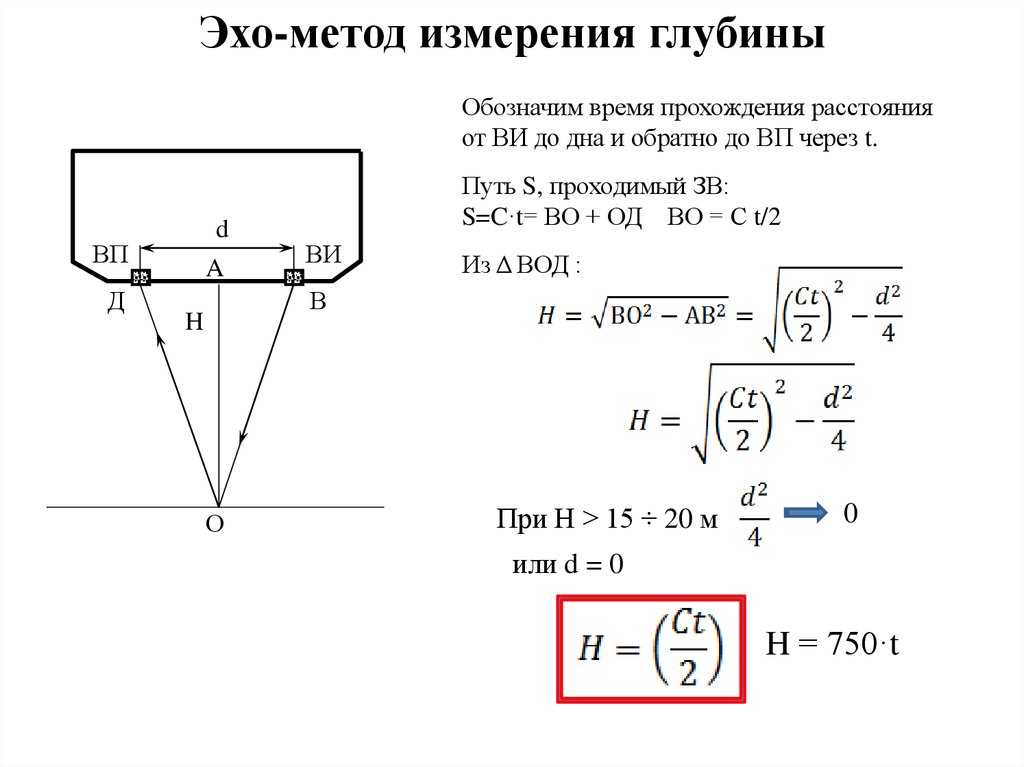
Эхо-метод измерения глубиныОбозначим время прохождения расстояния
от ВИ до дна и обратно до ВП через t.
d
ВП
Д
A
Путь S, проходимый ЗВ:
S=C·t= ВО + ОД ВО = С t/2
ВИ
Из Δ ВОД :
В
H
О
При Н > 15 ÷ 20 м
0
или d = 0
H = 750·t
4.
5.
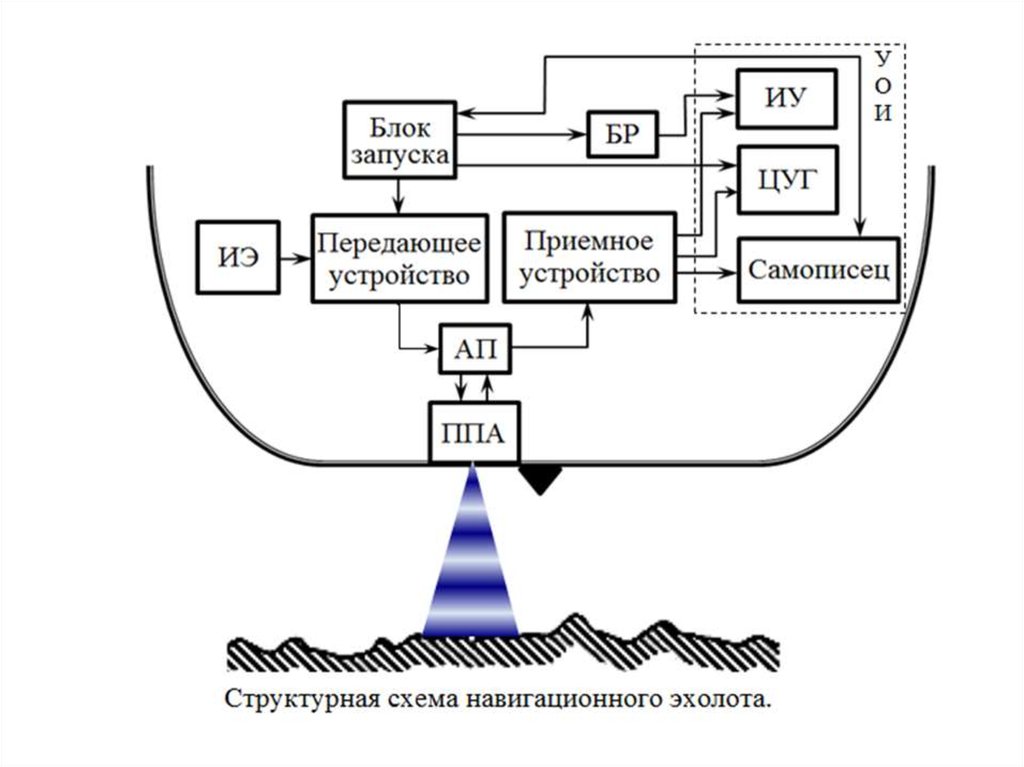
1. Источник энергии (ИЭ), предназначен дляобеспечения работы мощного передающего устройства.
2. Блок запуска (БЗ), предназначен для выработки
запускающих
импульсов,
которые
подаются
на
электронные схемы эхолота и определяют начало всех
процессов, синхронизируют взаимодействие устройств и
каналов эхолота.
3. Передающее устройство, предназначено для
формирования электрического зондирующего импульса по
форме, длительности τи, рабочей частоте fи, амплитуде,
частоте следования Fз.
4. Приемо-передающая антенна (ППА), и предназначена
для излучения ультразвуковых зондирующих импульсов и
приема эхо-сигналов. Обладает обратимыми свойствами.
6.
5.Антенный
переключатель
(АП),
предназначен для переключения приемопередающей антенны с передачи на прием и
обратно.
6. Приемное устройство предназначено для
усиления слабых электрических эхо-сигналов, их
выделения на фоне шумов и помех, обработки и
получения информации о глубине.
7. Блок разверток (БР) предназначен для
управления горизонтальной и вертикальной
развертками, их запуска в момент излучения
зондирующего импульса.
7.
8. Устройства отображения информации (УОИ) могутиспользоваться одного или нескольких типов:
Самописец,
предназначен
для
графического
отображения информации об измененной глубине в виде
эхограммы, ее документирования и долговременного
хранения.
В большинстве современных эхолотов вместо самописца
предусмотрено подключение внешних принтеров.
- Индикаторное устройство (ИУ), предназначено для
цифрового и графического отображения текущей глубины и
долговременного хранения ранее записанных эхограмм.
- Цифровой указатель глубины (ЦУГ), предназначен для
отображения текущего значения измеренной глубины в
цифровом виде, в том числе на дополнительных цифровых
репитерах.
8.
ИНДИКАТОРНавигационный эхолот Furuno F-2000
9.
Указательглубины
эхолота NASA
Clipper Depth
Навигационный эхолот JRC JFE-582
10.
Указатель глубинынавигационного эхолота НЭЛ-5
11. Основные параметры эхолота
К основным эксплуатационным параметрам относятся:- максимальная дальность действия,
- разрешающая способность по глубине,
- мертвая зона,
- точность измерения глубины.
К техническим параметрам относятся:
- излучаемая мощность,
- ширина характеристики направленности,
- длительность излучаемых импульсов,
- рабочая частота;
- частота следования зондирующих импульсов;
- коэффициент усиления и др.
12.
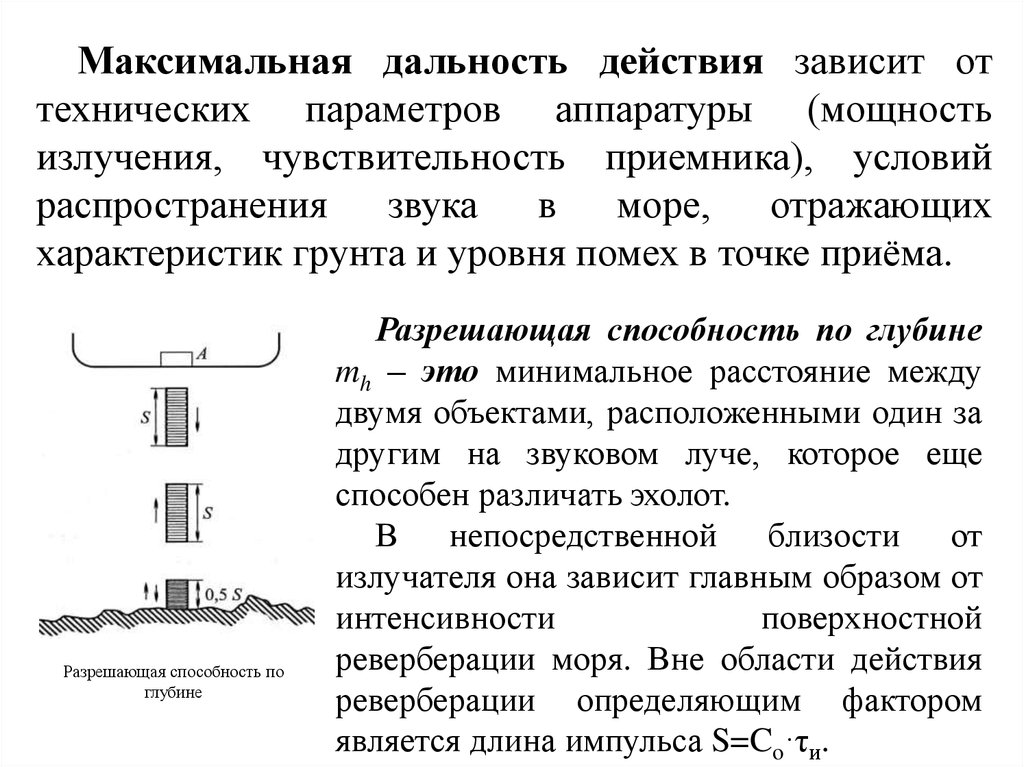
Максимальная дальность действия зависит оттехнических параметров аппаратуры (мощность
излучения, чувствительность приемника), условий
распространения
звука
в
море,
отражающих
характеристик грунта и уровня помех в точке приёма.
Разрешающая способность по
глубине
Разрешающая способность по глубине
mh – это минимальное расстояние между
двумя объектами, расположенными один за
другим на звуковом луче, которое еще
способен различать эхолот.
В непосредственной близости от
излучателя она зависит главным образом от
интенсивности
поверхностной
реверберации моря. Вне области действия
реверберации определяющим фактором
является длина импульса S=Co·τи.
13.
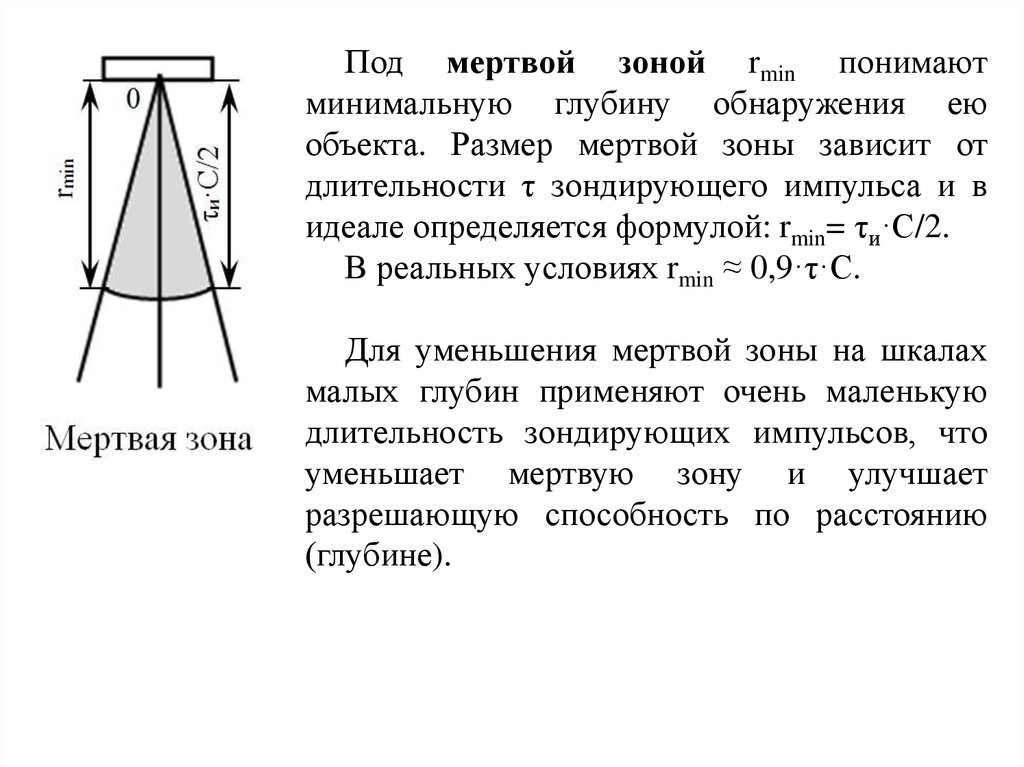
Под мертвой зоной rmin понимаютминимальную глубину обнаружения ею
объекта. Размер мертвой зоны зависит от
длительности τ зондирующего импульса и в
идеале определяется формулой: rmin= τи·С/2.
В реальных условиях rmin ≈ 0,9·τ·С.
Для уменьшения мертвой зоны на шкалах
малых глубин применяют очень маленькую
длительность зондирующих импульсов, что
уменьшает мертвую зону и улучшает
разрешающую способность по расстоянию
(глубине).
14.
Точность измерения глубиныПогрешности измерения могут быть подразделены на:
инструментальные и методические.
Инструментальные вызваны несовершенством конструкции
или неправильной регулировкой прибора;
Методические зависят от внешних факторов или вытекают
непосредственно из принципа действия эхолота.
1. Погрешность, обусловленная отклонением
действительной скорости звука от расчетной. При расчете
шкалы эхолота скорость распространения звука в воде
принимается постоянной и равной 1500 м/с. Однако в реальных
условиях скорость звука неодинакова как в различных районах
моря, так и в одной точке по глубине.
15.
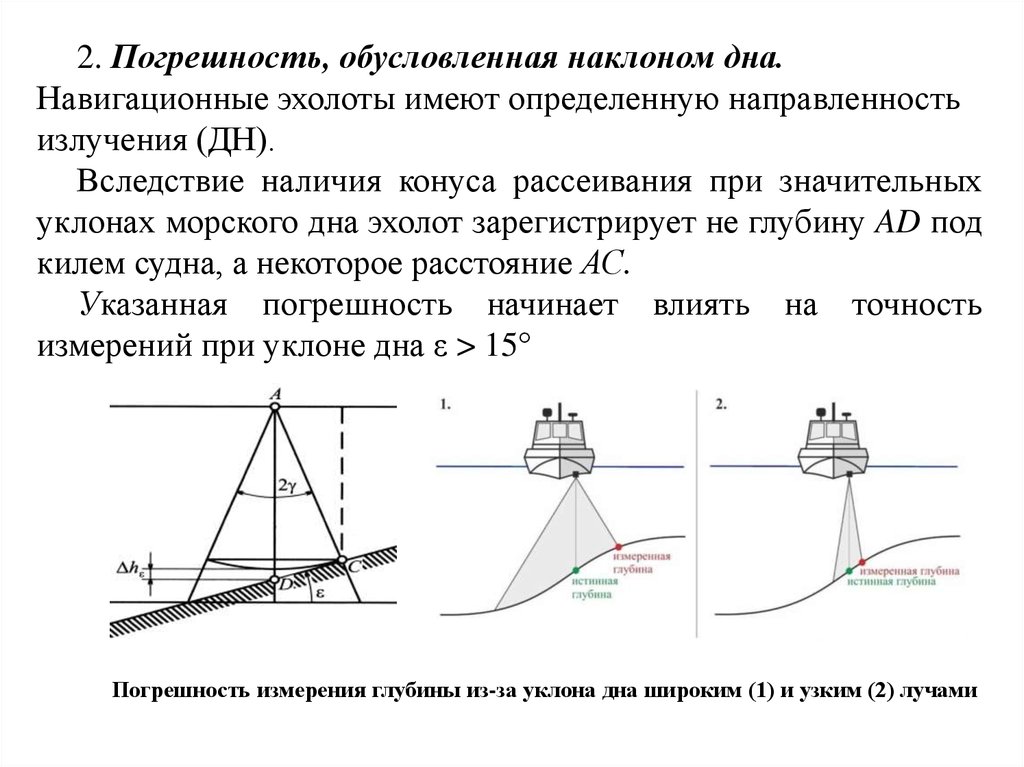
2. Погрешность, обусловленная наклоном дна.Навигационные эхолоты имеют определенную направленность
излучения (ДН).
Вследствие наличия конуса рассеивания при значительных
уклонах морского дна эхолот зарегистрирует не глубину AD под
килем судна, а некоторое расстояние АС.
Указанная погрешность начинает влиять на точность
измерений при уклоне дна ε > 15°
Погрешность измерения глубины из-за уклона дна широким (1) и узким (2) лучами
16.
ТЕХНИЧЕСКИЕ ПАРАМЕТРЫ ЭХОЛОТАМощность излучения - один из основных технических
параметров.
Большая мощность необходима для измерения больших
глубин.
Для работы на мелких глубинах необходима минимальная
мощность, для предотвращения влияния реверберации.
При большой мощности, мелкой глубине и высокой
отражающей способности дна на экране эхолота возможны
случаи «двойного дна», когда звуковые импульсы дважды
отражаются от дна и днища судна.
1-е эхо
2-е эхо
Двойное дно на экране эхолота
В современных эхолотах величина
мощности
выбирается
в
зависимости от установленного
диапазона
и
составляет
от
нескольких ватт до 10÷15 кВт.
Может выставляться вручную, в
зависимости от гидрологических и
других условий.
17.
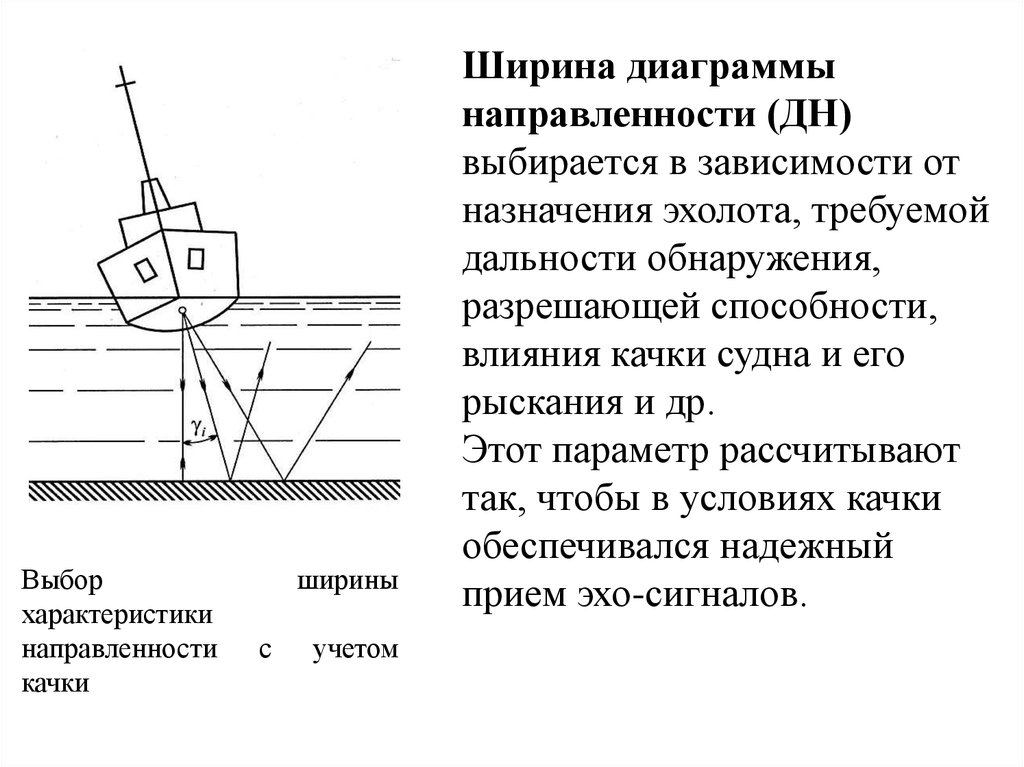
Выборхарактеристики
направленности
качки
ширины
с
учетом
Ширина диаграммы
направленности (ДН)
выбирается в зависимости от
назначения эхолота, требуемой
дальности обнаружения,
разрешающей способности,
влияния качки судна и его
рыскания и др.
Этот параметр рассчитывают
так, чтобы в условиях качки
обеспечивался надежный
прием эхо-сигналов.
18.
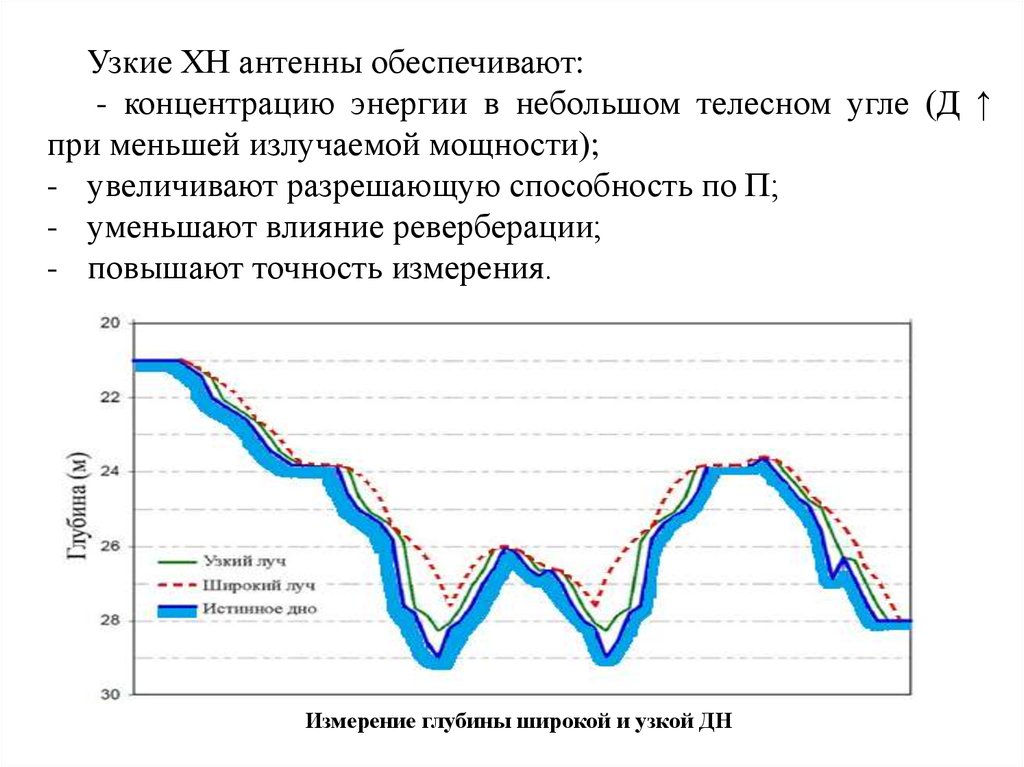
Узкие ХН антенны обеспечивают:- концентрацию энергии в небольшом телесном угле (Д ↑
при меньшей излучаемой мощности);
- увеличивают разрешающую способность по П;
- уменьшают влияние реверберации;
- повышают точность измерения.
Измерение глубины широкой и узкой ДН
19.
Параметры зондирующих импульсовИмпульсы различаются по форме огибающей, по заполняющей частоте,
длительности и частоте следования. Чаще всего применяются импульсы
прямоугольной формы. Их огибающая имеет прямоугольную форму и
заполняется 30÷40 колебаниями рабочей частоты fр.
Длительность τи импульса выбирают с учетом следующих
противоречивых условий:
1. Чем больше τи , тем меньший уровень шума воспринимает приемник;
2. Энергии импульса. Она пропорциональна τи, поэтому с увеличением τи
возрастает его дальность распространения;
3. Длительность зондирующего импульса. Она определяет мертвую зону,
разрешающую способность и энергетическую дальность действия эхолота.
- Чем меньше τи, тем выше порог возникновения кавитации.
- Уменьшение τи приводит к улучшению разрешающей способности по
глубине. Однако ухудшается порог чувствительности приемного тракта, что
приводит к уменьшению дальности действия аппаратуры.
В эхолотах, как правило, предусматриваются импульсы посылки как
короткой (0,5÷1) мс, так и большой длительности (20÷30) мс.
20.
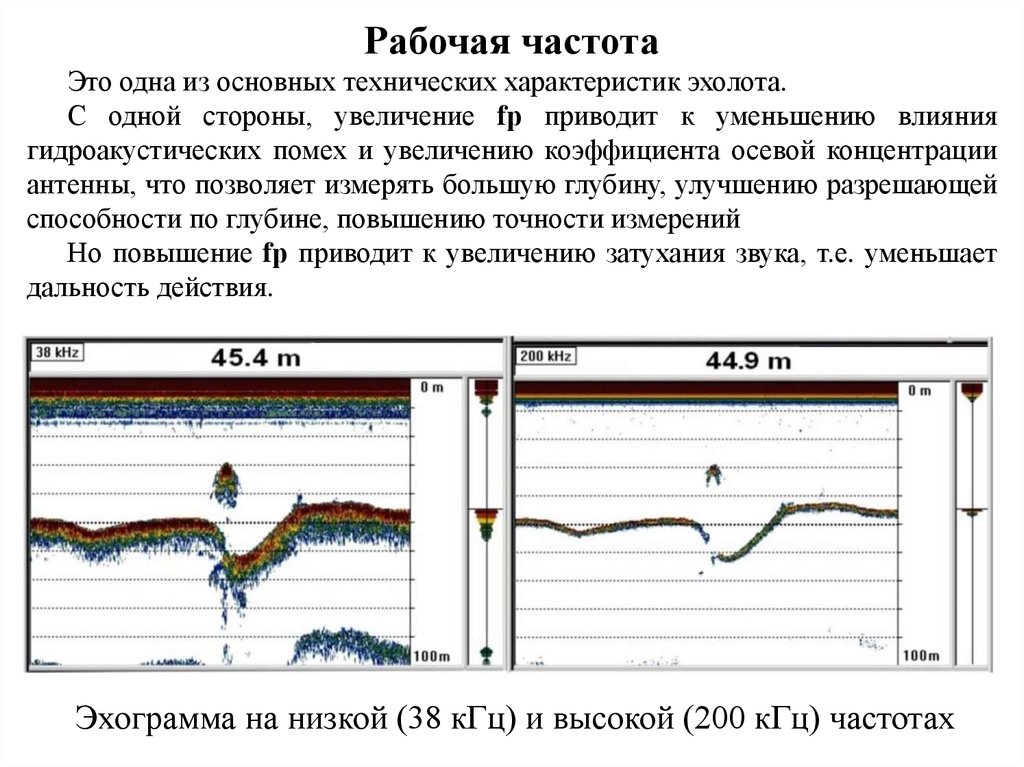
Рабочая частотаЭто одна из основных технических характеристик эхолота.
С одной стороны, увеличение fр приводит к уменьшению влияния
гидроакустических помех и увеличению коэффициента осевой концентрации
антенны, что позволяет измерять большую глубину, улучшению разрешающей
способности по глубине, повышению точности измерений
Но повышение fр приводит к увеличению затухания звука, т.е. уменьшает
дальность действия.
Эхограмма на низкой (38 кГц) и высокой (200 кГц) частотах
21.
Частота следования зондирующих импульсовЧастота
Fп
определяет
количество
принимаемых эхо-сигналов в единицу времени
т. е. информации об отражающих объектах
(увеличивается число отраженных от объекта
сигналов), что облегчает выделение полезных
сигналов на фоне помех и шумов.
Частота Fп посылок зависит от выбранного
диапазона глубины hmax и значения расчетной
скорости со звука Cо.
Учитывая данные условия, для каждого
диапазона эхолота рассчитывается своя Fп,
Fп =30·Cо/hmax.
22.
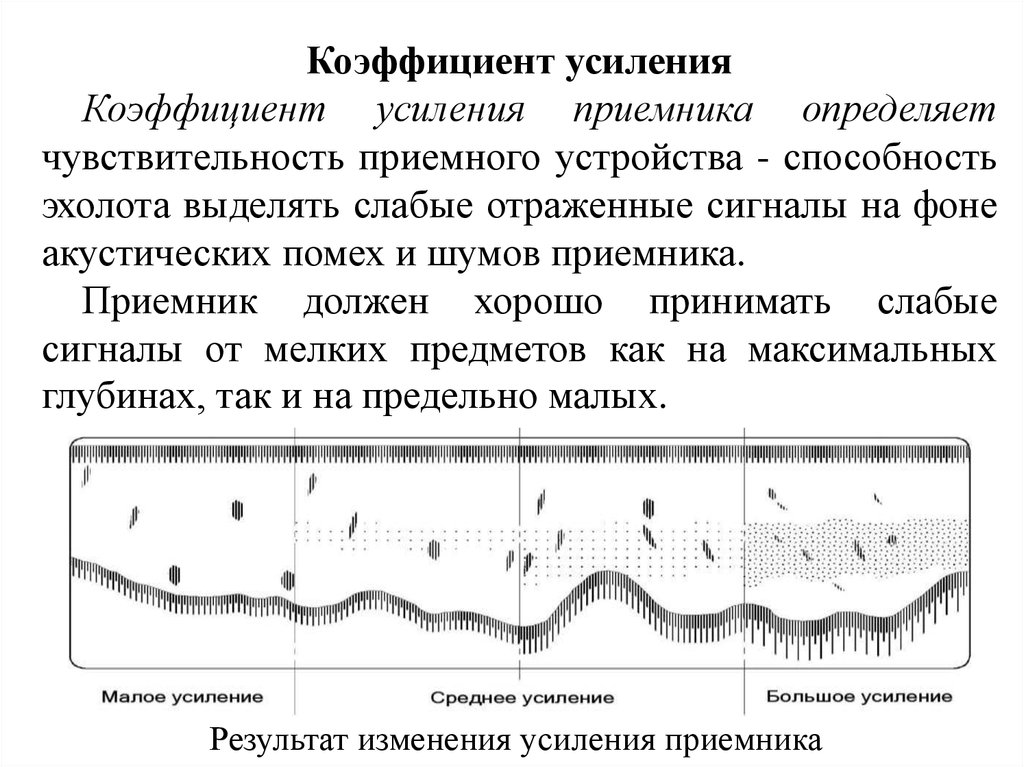
Коэффициент усиленияКоэффициент усиления приемника определяет
чувствительность приемного устройства - способность
эхолота выделять слабые отраженные сигналы на фоне
акустических помех и шумов приемника.
Приемник должен хорошо принимать слабые
сигналы от мелких предметов как на максимальных
глубинах, так и на предельно малых.
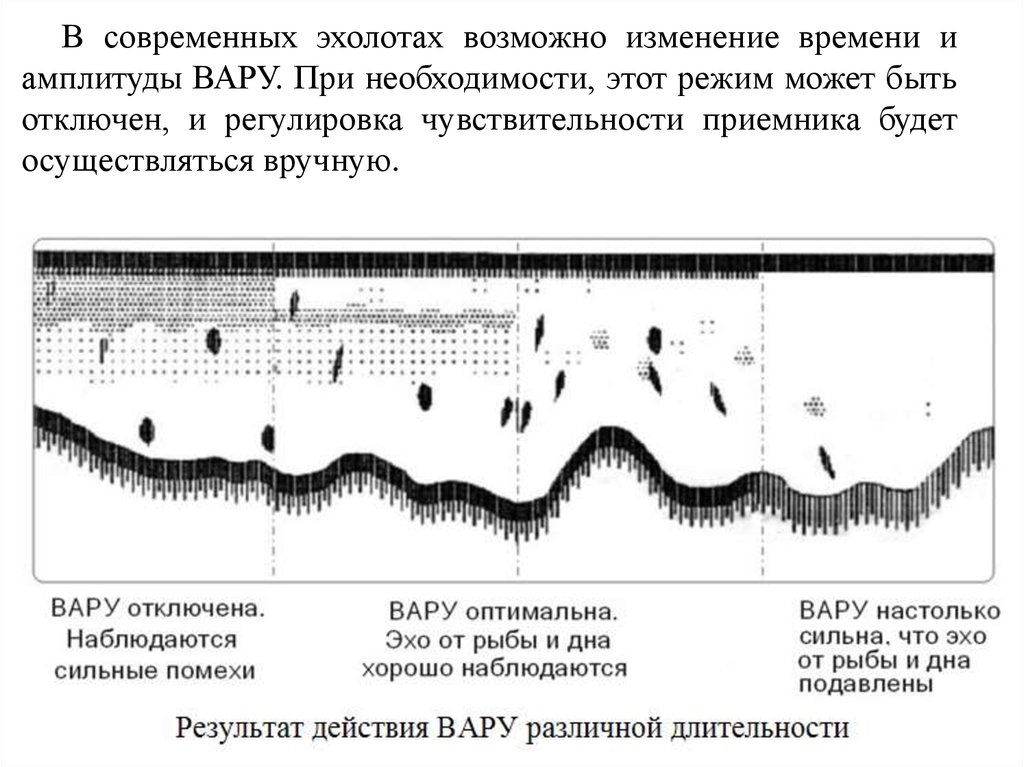
Результат изменения усиления приемника
23.
В реальных условиях существуют одновременно,накладываясь друг на друга, поверхностная, объемная
и
донная
реверберации.
Флюктуирующая
реверберация маскирует эхо-сигнал сильнее, чем
монотонно убывающая, отрицательно сказывается на
работе эхолота, т. к. она маскирует эхо-сигнал,
пришедший с малых глубин.
Борьба
с
реверберационной
помехой
осуществляется:
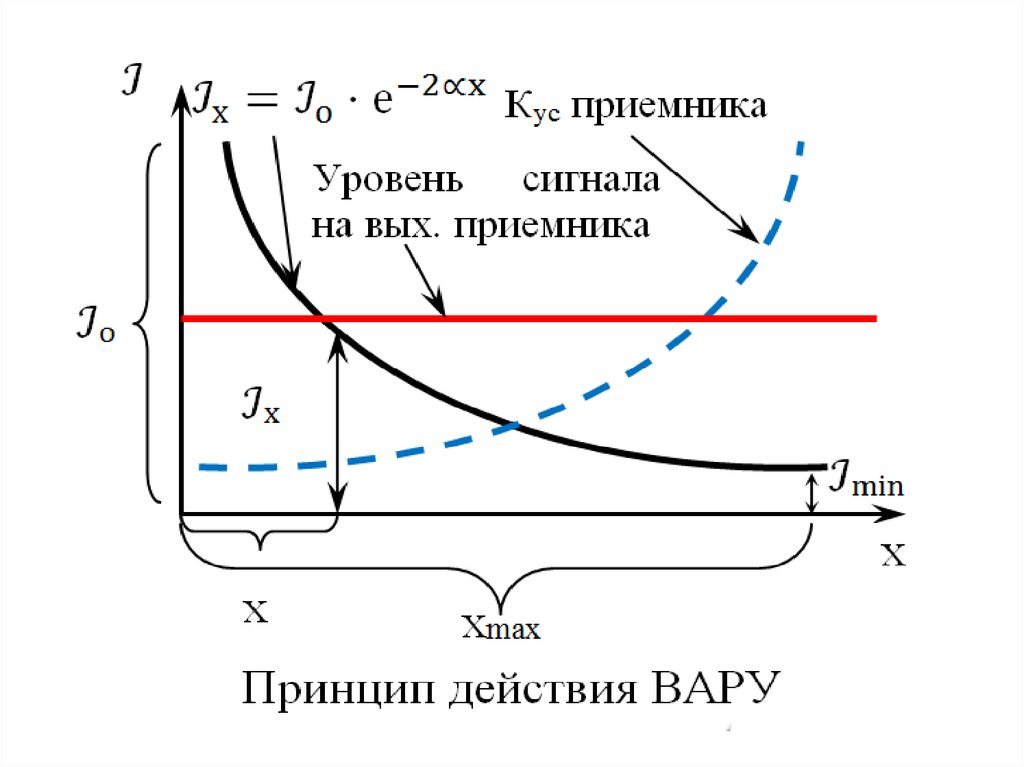
1. Введением временной регулировки усиления
(ВАРУ).
2. Применением более короткой посылки при малых
глубинах;
3. Повышением направленности акустических
антенн.
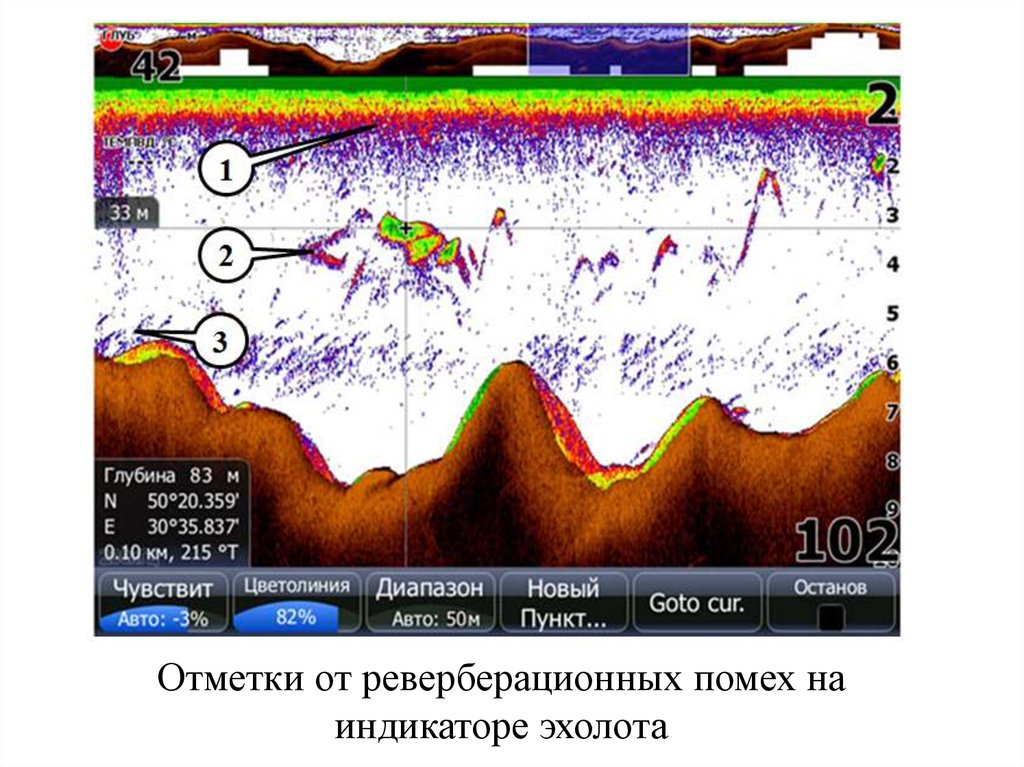
24.
Отметки от реверберационных помех наиндикаторе эхолота
25.
26.
В современных эхолотах возможно изменение времени иамплитуды ВАРУ. При необходимости, этот режим может быть
отключен, и регулировка чувствительности приемника будет
осуществляться вручную.
27.
Выбор места установки антенны1. Колебания гидродинамического давления при изменении
скорости судна в районе антенны должны быть минимальными.
2. Антенны необходимо располагать как можно дальше от
машин, механизмов, гребных валов и других устройств,
создающих помехи.
3. Впереди антенны и вблизи нее (на расстоянии не менее 3 м)
не должно быть никаких выступающих частей или отверстий,
выбрасывающих воду, насыщенную воздухом.
4. На пути сигнала, излученного антенной, и эхо-сигнала (в
пределах ДН) не должно быть препятствий, которые могут
отражать звук.
28.
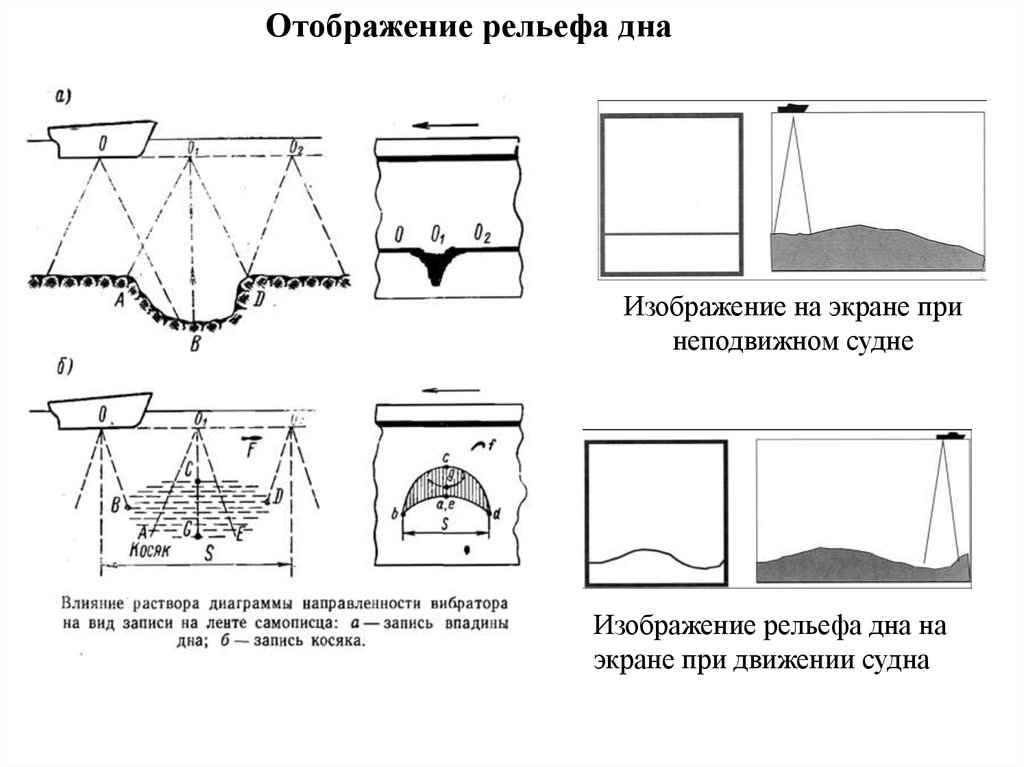
Отображение рельефа днаИзображение на экране при
неподвижном судне
Изображение рельефа дна на
экране при движении судна
29.
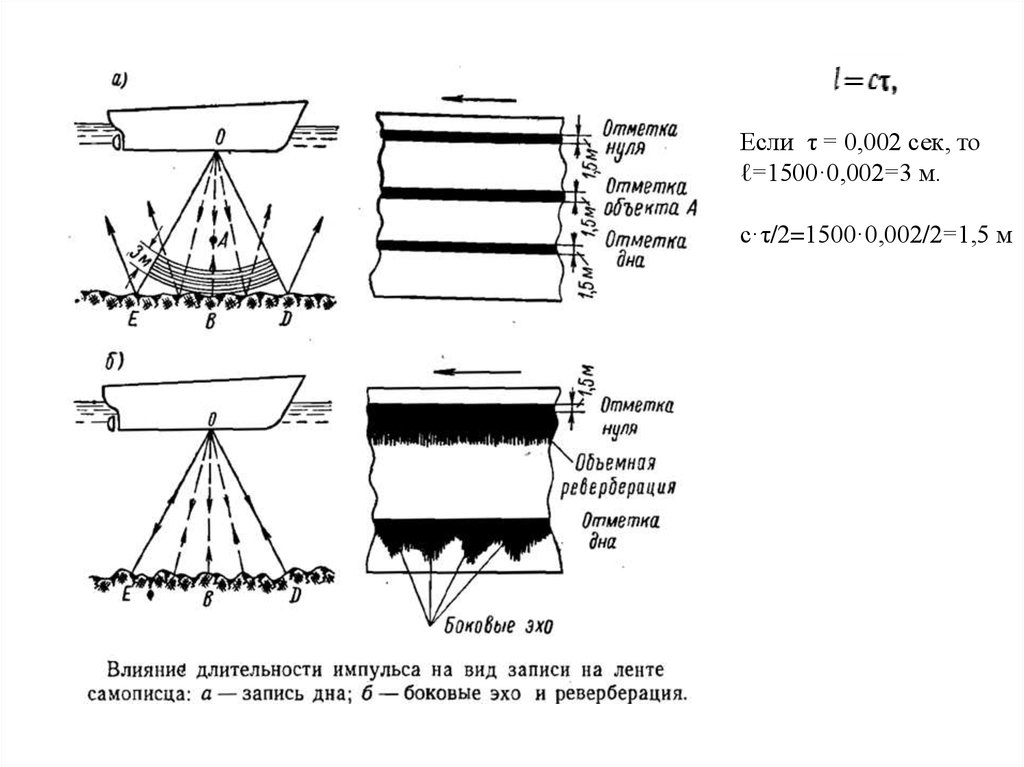
Если τ = 0,002 сек, тоℓ=1500·0,002=3 м.
с·τ/2=1500·0,002/2=1,5 м
30.
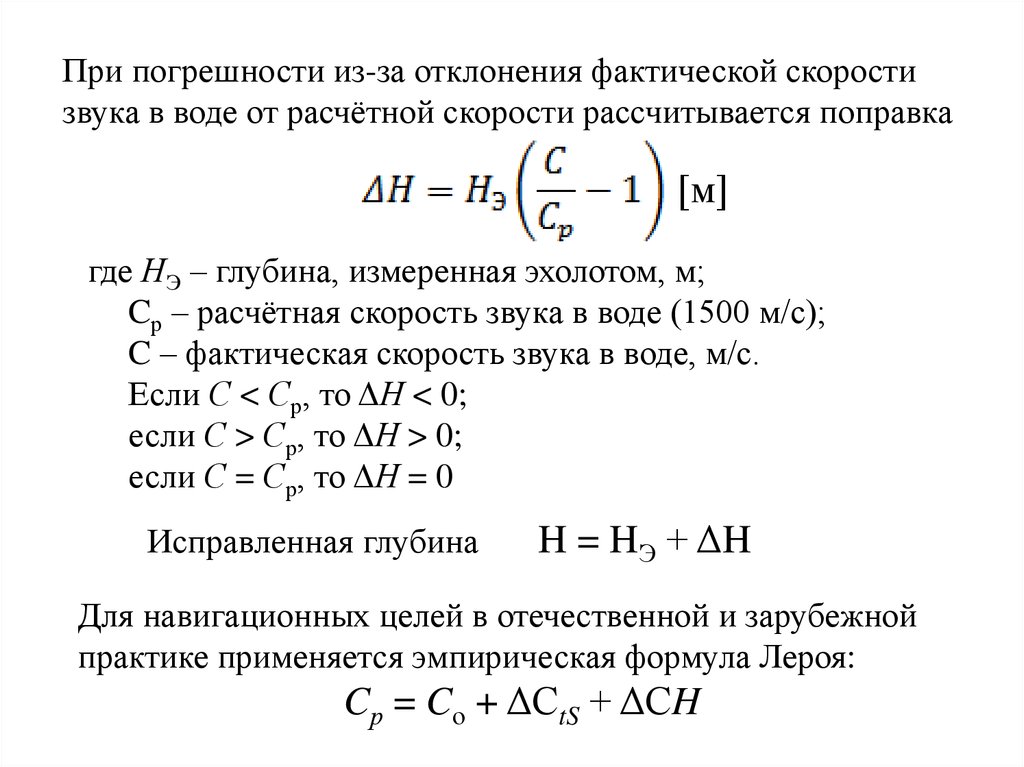
При погрешности из-за отклонения фактической скоростизвука в воде от расчётной скорости рассчитывается поправка
[м]
где НЭ – глубина, измеренная эхолотом, м;
Cр – расчётная скорость звука в воде (1500 м/с);
C – фактическая скорость звука в воде, м/с.
Если С < Ср, то ΔН < 0;
если С > Ср, то ΔН > 0;
если С = Ср, то ΔН = 0
Исправленная глубина
H = HЭ + ΔH
Для навигационных целей в отечественной и зарубежной
практике применяется эмпирическая формула Лероя:
Cр = Cо + ΔСtS + ΔСH
31.
Для практических вычислений скорости звука в воде в МТ-2000 настр. 267 имеется Таблица 2.9. “Скорость звука в морской воде”:
Таблицы 2.9.а), предназначенной для получения величины
поправки ΔСtS,
Таблицы 2.9.б), с помощью которой можно определить величину
поправки ΔСН.
Информацию о температуре и солёности воды в районе
предстоящего
плавания
можно
получить
из
гидрометеорологического очерка соответствующей лоции, а
также из справочной Таблицы 5.35. на стр. 449 МТ-2000
“Температура, солёность и плотность поверхностных вод
Мирового океана”.
32.
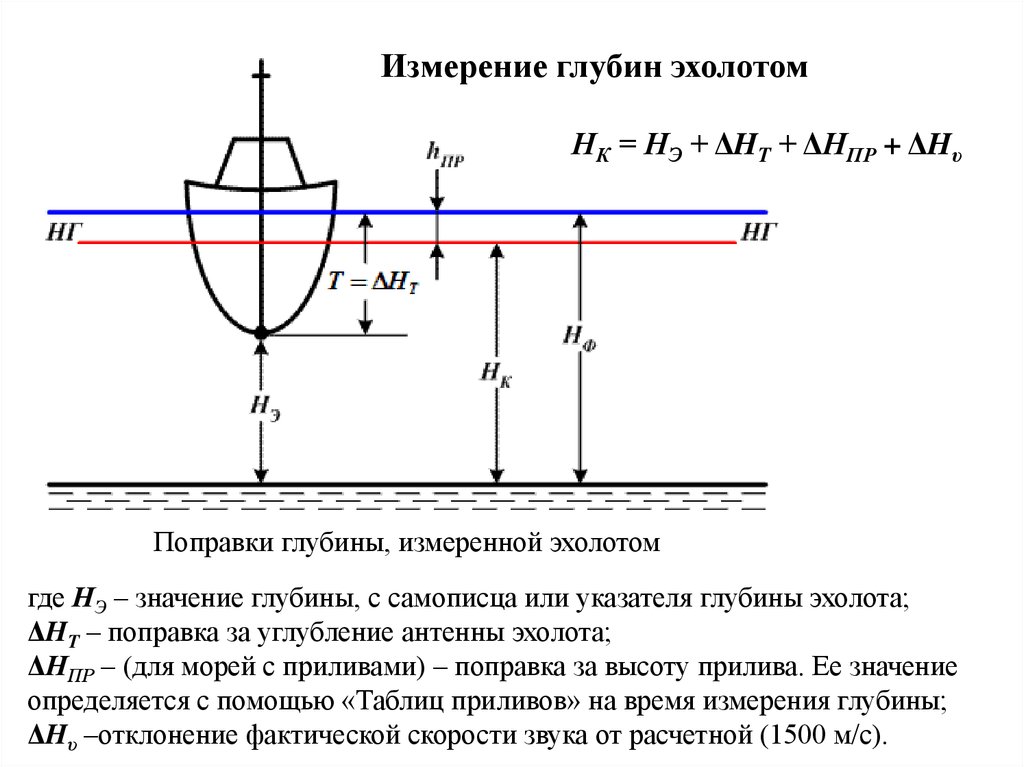
Измерение глубин эхолотомНК = НЭ + ΔHT + ΔНПР + ΔHυ
Поправки глубины, измеренной эхолотом
где НЭ – значение глубины, с самописца или указателя глубины эхолота;
ΔHT – поправка за углубление антенны эхолота;
ΔНПР – (для морей с приливами) – поправка за высоту прилива. Ее значение
определяется с помощью «Таблиц приливов» на время измерения глубины;
ΔHυ –отклонение фактической скорости звука от расчетной (1500 м/с).
33.
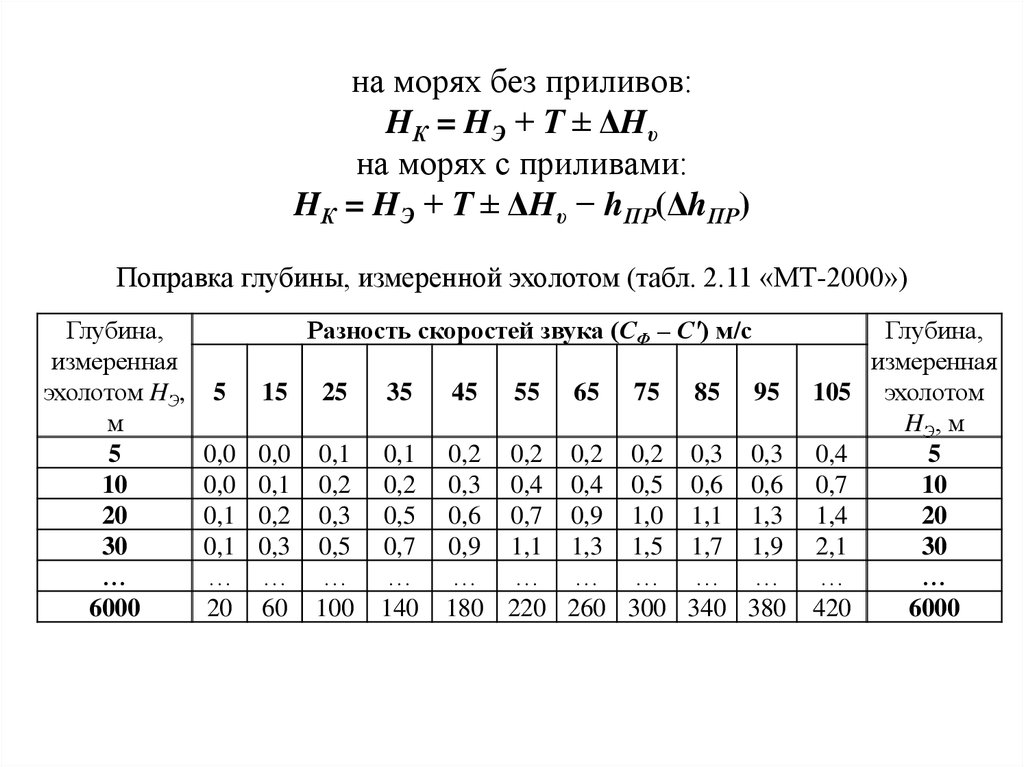
на морях без приливов:HК = HЭ + Т ± ΔHυ
на морях с приливами:
HК = HЭ + Т ± ΔHυ − hПР(ΔhПР)
Поправка глубины, измеренной эхолотом (табл. 2.11 «МТ-2000»)
Глубина,
измеренная
эхолотом HЭ,
м
5
10
20
30
…
6000
Разность скоростей звука (СФ – С′) м/с
5
0,0
0,0
0,1
0,1
…
20
15
25
35
45
55
65
75
85
95
105
0,0 0,1
0,1 0,2
0,2 0,3
0,3 0,5
… …
60 100
0,1
0,2
0,5
0,7
…
140
0,2 0,2
0,3 0,4
0,6 0,7
0,9 1,1
… …
180 220
0,2
0,4
0,9
1,3
…
260
0,2
0,5
1,0
1,5
…
300
0,3
0,6
1,1
1,7
…
340
0,3
0,6
1,3
1,9
…
380
0,4
0,7
1,4
2,1
…
420
Глубина,
измеренная
эхолотом
HЭ, м
5
10
20
30
…
6000
34.
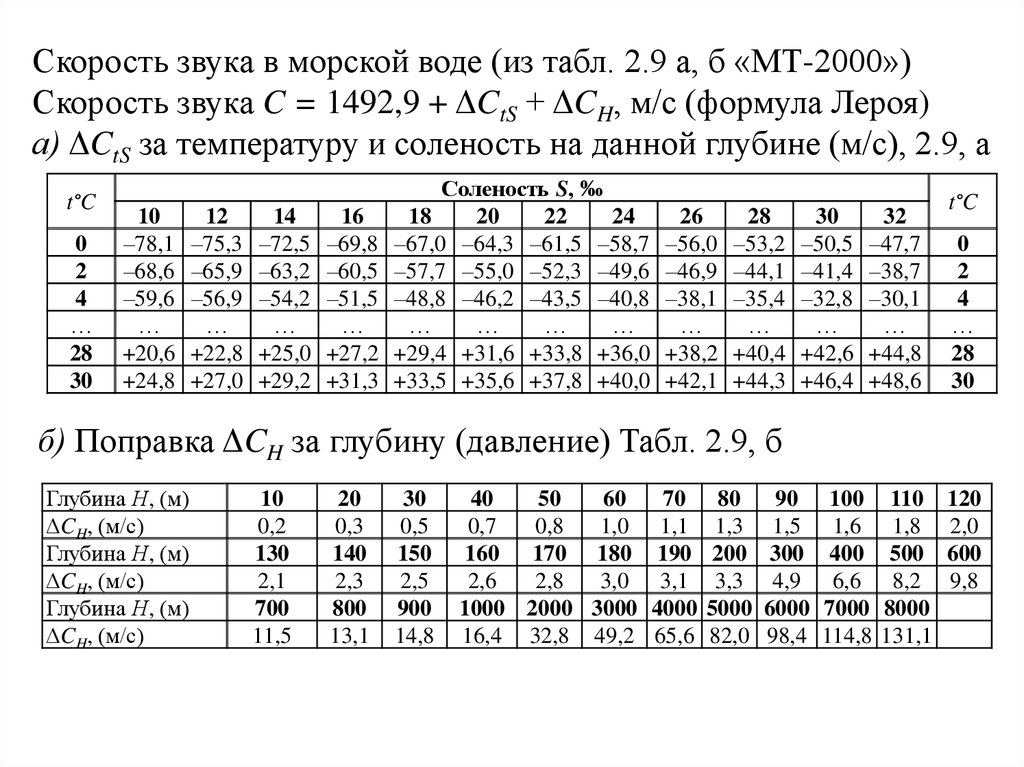
Скорость звука в морской воде (из табл. 2.9 а, б «МТ-2000»)Скорость звука C = 1492,9 + ΔCtS + ΔCH, м/с (формула Лероя)
а) ΔCtS за температуру и соленость на данной глубине (м/с), 2.9, а
t°C
0
2
4
…
28
30
10
–78,1
–68,6
–59,6
…
+20,6
+24,8
12
–75,3
–65,9
–56,9
…
+22,8
+27,0
14
–72,5
–63,2
–54,2
…
+25,0
+29,2
16
–69,8
–60,5
–51,5
…
+27,2
+31,3
Соленость S, ‰
18
20
22
24
–67,0 –64,3 –61,5 –58,7
–57,7 –55,0 –52,3 –49,6
–48,8 –46,2 –43,5 –40,8
…
…
…
…
+29,4 +31,6 +33,8 +36,0
+33,5 +35,6 +37,8 +40,0
26
–56,0
–46,9
–38,1
…
+38,2
+42,1
28
–53,2
–44,1
–35,4
…
+40,4
+44,3
30
–50,5
–41,4
–32,8
…
+42,6
+46,4
32
–47,7
–38,7
–30,1
…
+44,8
+48,6
t°C
0
2
4
…
28
30
б) Поправка ΔCH за глубину (давление) Табл. 2.9, б
Глубина Н, (м)
ΔCH, (м/с)
Глубина Н, (м)
ΔCH, (м/с)
Глубина Н, (м)
ΔCH, (м/с)
10
0,2
130
2,1
700
11,5
20
0,3
140
2,3
800
13,1
30
0,5
150
2,5
900
14,8
40
50
60
0,7
0,8
1,0
160 170 180
2,6
2,8
3,0
1000 2000 3000
16,4 32,8 49,2
70
1,1
190
3,1
4000
65,6
80
1,3
200
3,3
5000
82,0
90
1,5
300
4,9
6000
98,4
100
1,6
400
6,6
7000
114,8
110
1,8
500
8,2
8000
131,1
120
2,0
600
9,8