








")











 Электроника
ЭлектроникаПохожие презентации:










Алгоритмы траекторной обработки данных
1.
АЛГОРИТМЫ ТРАЕКТОРНОЙОБРАБОТКИ ДАННЫХ
2. ОСНОВНЫЕ ПОНЯТИЯ ТРАЕКТОРНОЙ ОБРАБОТКИ ДАННЫХ
Отметкарадара
Траектория
Строб
Канал
автосопровождения
Мультирадарные
Алгоритмы
траектории
сопровождения целей
3.
ОТМЕТКА РАДАРАОтметка радара соответствует обнаружению объекта
радаром в определенный момент времени.
Отметка несет информацию:
о координатах обнаруженного ВС
дополнительную информацию (при наличии активного канала)
Для конкретного радара могут быть заданы области, где
он заведомо не должен получать отметок. При приходе
отметки в такой области она будет игнорироваться.
4.
ТРАЕКТОРИЯТраектория представляет из себя набор:
информации о параметрах движения цели
(координаты, скорость, курс, высоту, ускорение);
дополнительных сведений
(бортовой номер самолета, степень устаревания информации
по причине пропусков, текущие параметры сглаживания и др.).
Траектория используется для:
прогнозирования положения цели;
определения скорости и курса цели в любой момент времени, независимо от
прихода отметок.
Траектория может находиться в трех состояниях:
нулевого цикла;
захвата;
сопровождения.
Для получения информации о ВО используются только траектории на
сопровождении.
5.
ПОНЯТИЕ СТРОБАСТРОБ - ограниченная область пространства, в которой
с заданной вероятностью ожидается появление ВС
Строб используют
наблюдения.
Положение
строба
вычисляется
до
получения
информации о положении цели на очередном шаге
Область строба должна покрывать то множество точек,
где может находиться отметка.
Управление стробом носит упреждающий характер.
Во многих АС УВД при задании положения строба, его
формы и размеров используется вероятностный подход.
для
обеспечения
устойчивого
6.
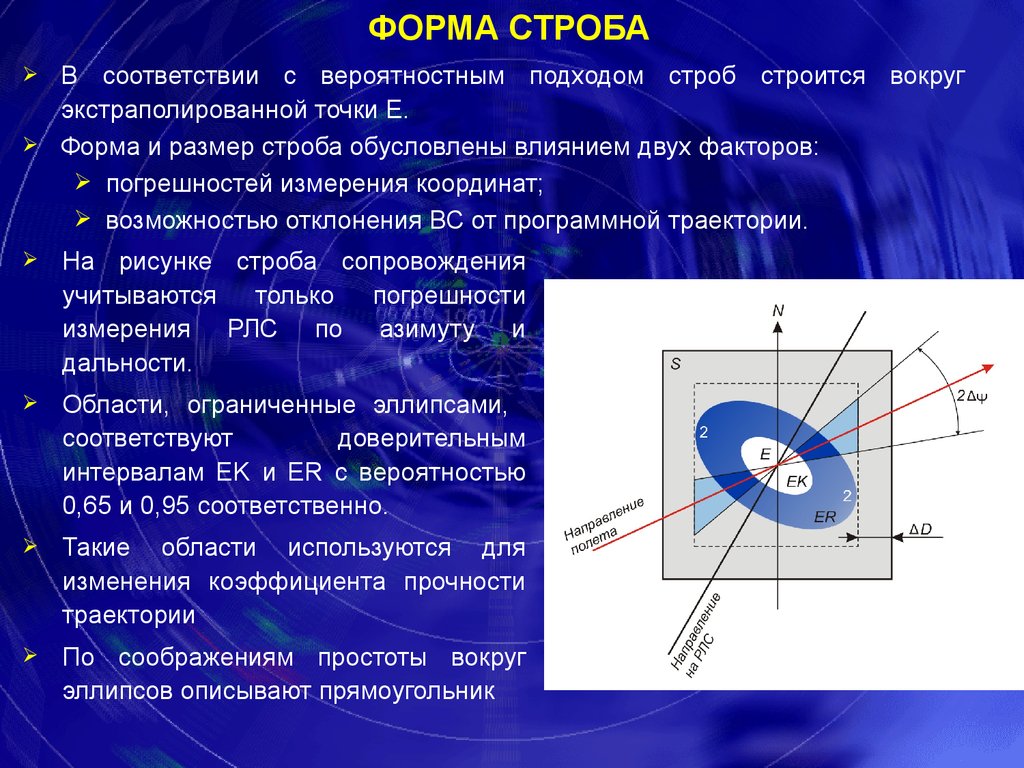
ФОРМА СТРОБАВ соответствии с вероятностным подходом строб строится вокруг
экстраполированной точки Е.
Форма и размер строба обусловлены влиянием двух факторов:
погрешностей измерения координат;
возможностью отклонения ВС от программной траектории.
На рисунке строба сопровождения
учитываются
только
погрешности
измерения РЛС по азимуту и
дальности.
Области, ограниченные эллипсами,
соответствуют
доверительным
интервалам EK и ER с вероятностью
0,65 и 0,95 соответственно.
Такие области используются для
изменения коэффициента прочности
траектории
По соображениям простоты вокруг
эллипсов описывают прямоугольник
7.
НАЗНАЧЕНИЕ СТРОБАСтроб предназначен для привязки пришедшей отметки радара к
существующей траектории.
Строб содержит - сведения об области и времени прихода отметки.
Область задается, как правило, в виде сектора кольца.
Промежуток времени, в который возможен приход отметки,
определяется временем обзора локатора и угловыми размерами
строба.
Для построения строба используется следующая информация:
текущая
оценка координат,
погрешность этих оценок;
скорости,
курса
и
текущая
маневренные характеристики цели;
качество сопровождения траектории на предыдущем этапе.
Возможно построение нескольких стробов.
Один строб строится в предположении о прямолинейном движении,
второй - в предположении присутствия маневра.
8. ИДЕНТИФИКАЦИЯ ОТМЕТОК И РАЗРЕШЕНИЕ СПОРНЫХ СИТУАЦИЙ
α αmaxx x e dx , z ze dz
Dmin D 0 Dmax
H 0 H э dh
9. СТРОБ МАНЕВРА
10. АВТОЗАХВАТ И СОПРОВОЖДЕНИЕ ЦЕЛИ
11. КАНАЛ АВТОСОПРОВОЖДЕНИЯ
Автосопровождение - процесс последовательного наблюдения задвижением отдельного объекта (цели).
В процессе сопровождения вся информация о сопровождаемой
цели записывается в определенную область памяти, называемую
каналом автосопровождения (КАС).
Данные КАС, обновляются на каждом очередном обзоре.
Номер КАС может указываться в формуляре сопровождения.
Перед выполнением вычислений, связанных с оцениванием новых
данных, выполняется идентификация вновь поступивших данных
с целью, уже находящейся в процессе сопровождения.
Количество КАС в современных АС УВД достигает нескольких
сотен (и даже тысяч).
12. СОСТАВ КАНАЛА АВТОСОПРОВОЖДЕНИЯ
номер формуляра;оценки координат (точечные, интервальные);
оценки параметров движения (скорости, путевого угла и др.);
координаты центра строба (экстраполированные) и параметры,
определяющие его размер и форму;
параметры
сглаживания
(коэффициенты
коэффициент прочности траектории);
количество пропусков;
бортовой номер (код ответчика или позывной – при наличии
вторичного канала);
высота (эшелон), запас топлива и другая дополнительная
информация, содержащаяся в формуляре сопровождения (при
наличии вторичного канала).
другая доступная и полезная информация о данном рейсе (в том
числе и плановая).
сглаживания,
13. АЛГОРИТМ СОПРОВОЖДЕНИЯ ТРАЕКТОРИЙ
1Получение отметки радара
Попадание
в строб существующей
траектории
Да
Нет
Нет
Обновление параметров
траектории (сглаживание)
Да
Отметка активного
канала?
Создание траектории
нулевого цикла
Nметок = Nметок + 1
Создание траектории
в режиме захвата
Нет
Нет
Обзор закончился?
1
Nметок > Nпор
Да
Да
Нет
Изменение режима
сопровождения траектории
(захват/сопровождение)
Есть траектории
без меток?
Да
Нет
Nметок < Nпор
Да
1
Траектория удаляется
14.
ДОПОЛНЕНИЯ К АЛГОРИТМУ СОПРОВОЖДЕНИЯ ТРАЕКТОРИЙ1.
Установлен следующий порядок проверки стробов на попадание
отметки:
строб
маневра (больший по
принадлежности к траектории;
объему)
–
определение
строб прямолинейного движения – критерий наличия или
отсутствия маневра.
2.
После идентификации отметки выполняется сглаживание ее
параметров.
3.
Коэффициенты сглаживания являются динамической величиной и
зависят от "качества" сопровождения траектории в предыдущие
моменты времени:
при
наличии
пропусков
или
обнаружении
коэффициенты сглаживания увеличиваются
маневра,
при устоявшемся сопровождении траектории коэффициенты
сглаживания уменьшаются.
15.
ДОПОЛНЕНИЯ К АЛГОРИТМУ СОПРОВОЖДЕНИЯ ТРАЕКТОРИЙ4.
Траектория нулевого цикла переводится в режим захвата с
приходом в ее строб второй отметки.
5.
Особенность траекторий в режиме захвата:
высокая вероятность того, что траектория ложная;
низкая точность информации о курсе и скорости.
6.
Траектории в режиме захвата, сопровождаются так же, как и
находящиеся в стадии сопровождения, но с несколько другими
параметрами:
больший размер строба;
более жесткий критерий уничтожения траектории;
большие величины коэффициентов сглаживания.
7.
Если на протяжении нескольких обзоров радара траектория в
режиме захвата стабильно сопровождается, то она переводится в
канал сопровождения.
16.
МУЛЬТИТРАЕКТОРНАЯ ОБРАБОТКАПрименяется для обеспечения стабильного сопровождения ВС
путем анализа информации, поступающей сразу от нескольких
радаров.
В
реальных
условиях
радары
обладают
различной
эффективностью (дальность, частота обзора, рельеф, здания,
переотражения и т.д.)
Для получения наиболее информативной картины ДВО нужно
использовать данные от нескольких радаров.
Для этого необходимо учитывать особенностей и возможностей
радаров, применительно к конкретным участкам зоны действия
системы УВД.
В
зависимости
от
обстоятельств,
при
формировании
мультирадарной траектории может использоваться траектория
только от одного радара, или сразу от нескольких, взятые с
различными весами.
17.
МУЛЬТИРАДАРНЫЕ ТРАЕКТОРИИМультирадарная траектория представляет собой совокупность
нескольких обычных траекторий, которые были отнесены к
одному и тому же ВС.
Траектории, в которых параметры движения цели близки,
привязываются к одной мультирадарной траектории.
Если коды ответчиков двух траекторий совпадают, то критерий
привязки становится менее жестким.
Две мультирадарные траектории, имеющие близкие параметры,
также могут быть склеены и объединены в одну.
Мультирадарная
траектория
несет
свою
собственную
информацию о параметрах движения цели, которую она
формирует из информации от отдельных радаров.
18.
ФОРМИРОВАНИЕ МУЛЬТИРАДАРНОЙ ТРАЕКТОРИИВариант «монорадар»:
Предусматривает
использование
только
одной из траекторий, игнорируя остальные.
Такой прием используется на участках, где
один из радаров:
имеет значительное преимущество
перед другими;
может обеспечить устойчивое
сопровождение ВС без использования
дополнительной информации.
Какой радар использовать в данном
настройками мультирадарной обработки.
случае
-
определяется
Могут быть заданы несколько областей, в которых будут определены
абсолютные приоритеты радаров.
Радары с меньшими приоритетами не будет учитываться.
19.
ФОРМИРОВАНИЕ МУЛЬТИРАДАРНОЙ ТРАЕКТОРИИВариант «виртуальный радар»:
Суть метода состоит в сочетании независимой обработки
информации от каждого отдельного источника и совместной
обработки, результаты которой интерпретируются как виртуальный
радар.
Результирующая траектория представляет собой комбинацию
траекторий от разных радаров, взятых с различными весами.
Веса траекторий рассчитываются на основе статических весов.
Статические
веса
задаются
мультирадарной обработки.
Статический вес траектории зависит:
вручную,
от погрешности данного радара,
количества ложных отметок,
вероятности пропуска отметки,
наличия лепестков и переотражений.
как
параметры
20. АЛГОРИТМ МУЛЬТИРАДАРНОЙ ТРАЕКТОРИИ (МРТ)
21. ПОЯСНЕНИЮ К АЛГОРИТМУ МРТ
1.Выполняется поиск простых траекторий от реальных радаров,
которые не привязаны ни к какой МРТ. Для каждой из них заводится
мультирадарная траектория.
2.
Перебираем МРТ, время жизни которых не превысило заданное
число (10–15) отсчетов. Ищем среди них близкие, (расхождение в
курсе, местоположении и высоте для которых не превышает
заданных ограничений). Если находятся такие траектории, то
«склеиваем» их в одну.
3.
Для каждой МРТ рассчитываем веса входящих в нее траекторий.
За основу берем статические (ранее назначенные) веса. Для
траекторий с плохим качеством (наличие пропусков) веса
уменьшаются
в
соответствии
с
заранее
назначенным
коэффициентом.
4.
Рассчитываем координаты, скорость и курс цели для
мультирадарной траектории как линейную комбинацию параметров
входящих в нее реальных траекторий с соответствующими весами.
5.
Выдаем рассчитанные параметры целей в качестве отсчетов
виртуального радара для построения траекторий, прогноза и пр.
22. ПОСТРОЕНИЕ МУЛЬТИРАДАРНОЙ ТРАЕКТОРИИ
23. СОВМЕСТНОЕ ИСПОЛЬЗОВАНИЕ ДАННЫХ РЛ-КОНТРОЛЯ И АЗН
Построение интегральных траекторийВ ситуациях, когда зоны перекрытия РЛ-контроля и системы АЗН чередуются
с областями ВП, где информация о положении наблюдаемого объекта
поступает лишь от одной из этих систем, при переходе от одной ситуации
такого рода к другой возникает задача «стыковки» траекторий.
Юстировка радаров
Целесообразно использовать для юстировки радаров в целях измерения
ошибок как систематических, так и вызванных влиянием переотражений,
боковых лепестков и пр.
Контроль достоверности данных АЗН
Для защиты от «грубых» ошибок возможно использовать данные от РЛК.
Обеспечение полноты информации о ВО на борту ВС
Функция TIS-В (Traffic Information Service-broadcast) является функцией АТМ,
при которой ЦЛПД служит для передачи не только АЗН данных, но и
РЛ-данных с Земли о координатах ВС, не имеющего оборудования АЗН.
24.
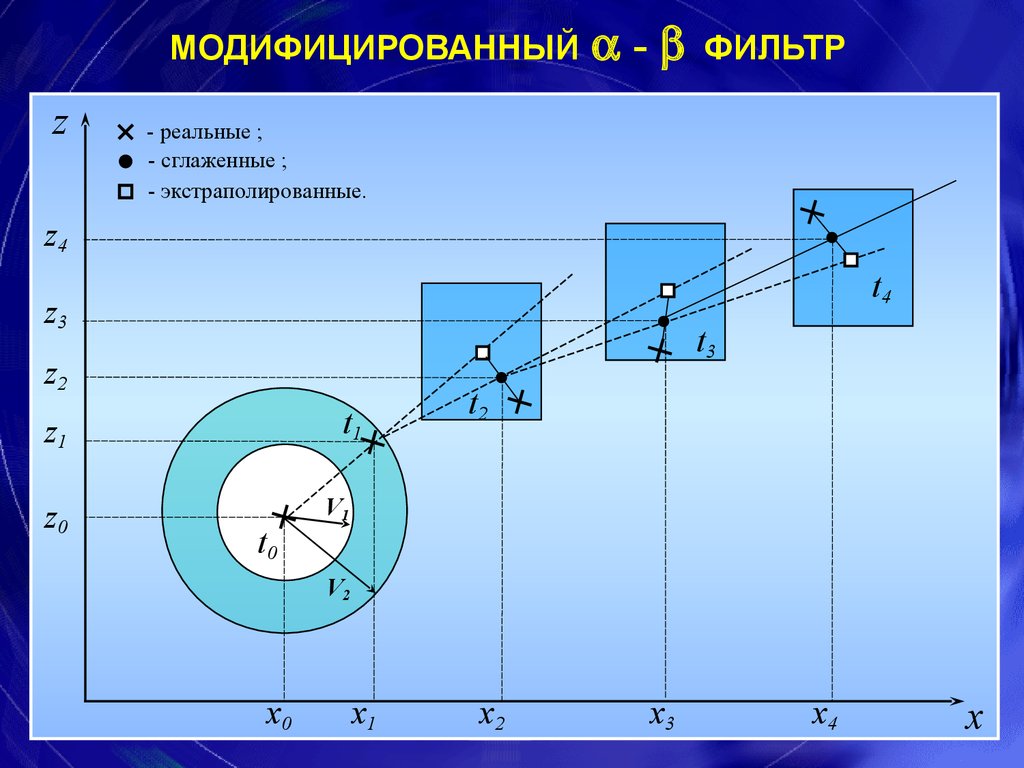
МОДИФИЦИРОВАННЫЙz
-
ФИЛЬТР
- реальные ;
- сглаженные ;
- экстраполированные.
z4
t4
z3
t3
z2
t1
z1
z0
t0
t2
V1
V2
x0
x1
x2
x3
x4
x
25. СКОЛЬЗЯЩЕЕ СГЛАЖИВАНИЕ ПО - ФИЛЬТРУ
СКОЛЬЗЯЩЕЕ СГЛАЖИВАНИЕ ПО - ФИЛЬТРУ- коэффициент сглаживания координат, = РМ / ЕР, (1 0 )
- коэффициент сглаживания скорости, = РМ / ЕР, (1 0 )
для гражданских ВС: = (0,3 - 0,5), = (0,1 - 0,3).
ЭКСТРАПОЛИРОВАННЫЕ
КООРДИНАТЫ
СГЛАЖЕННЫЕ
КООРДИНАТЫ
ИЗМЕРЕННЫЕ
КООРДИНАТЫ
26. ЗАВИСИМОСТЬ КОЭФФИЦИЕНТА СГЛАЖИВАНИЯ КООРДИНАТ ОТ ЧИСЛА НАБЛЮДЕНИЙ
27. ЗАВИСИМОСТЬ КОЭФФИЦИЕНТА СГЛАЖИВАНИЯ СКОРОСТИ ОТ ЧИСЛА НАБЛЮДЕНИЙ
28.
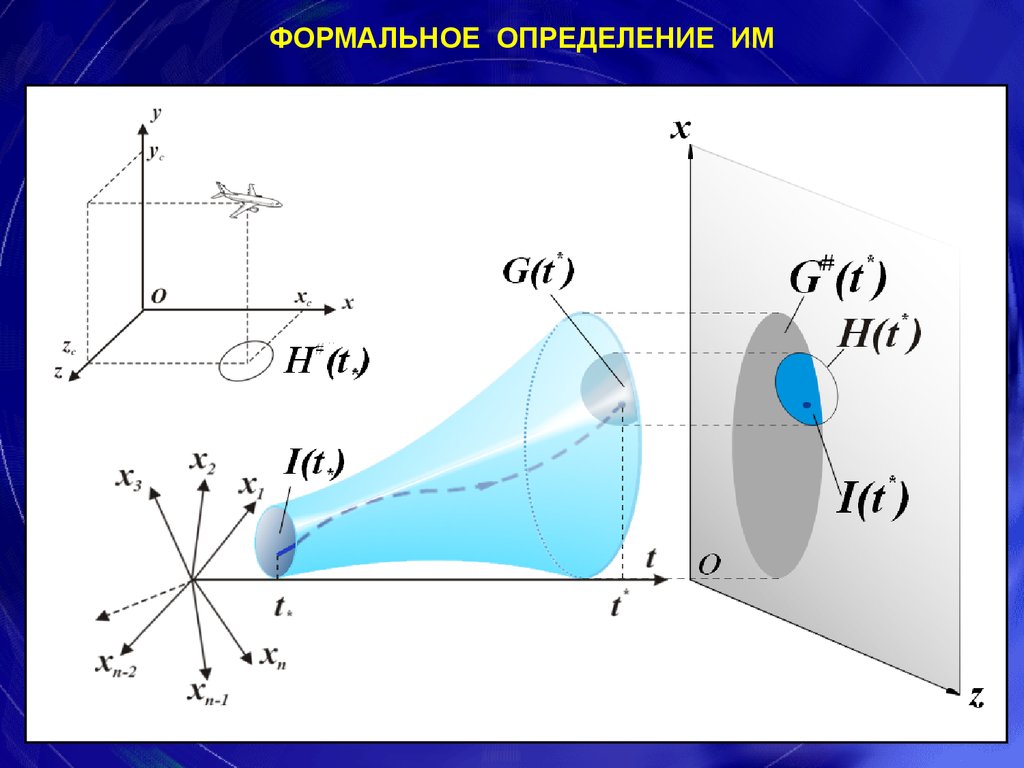
ФОРМАЛЬНОЕ ОПРЕДЕЛЕНИЕ ИМ29.
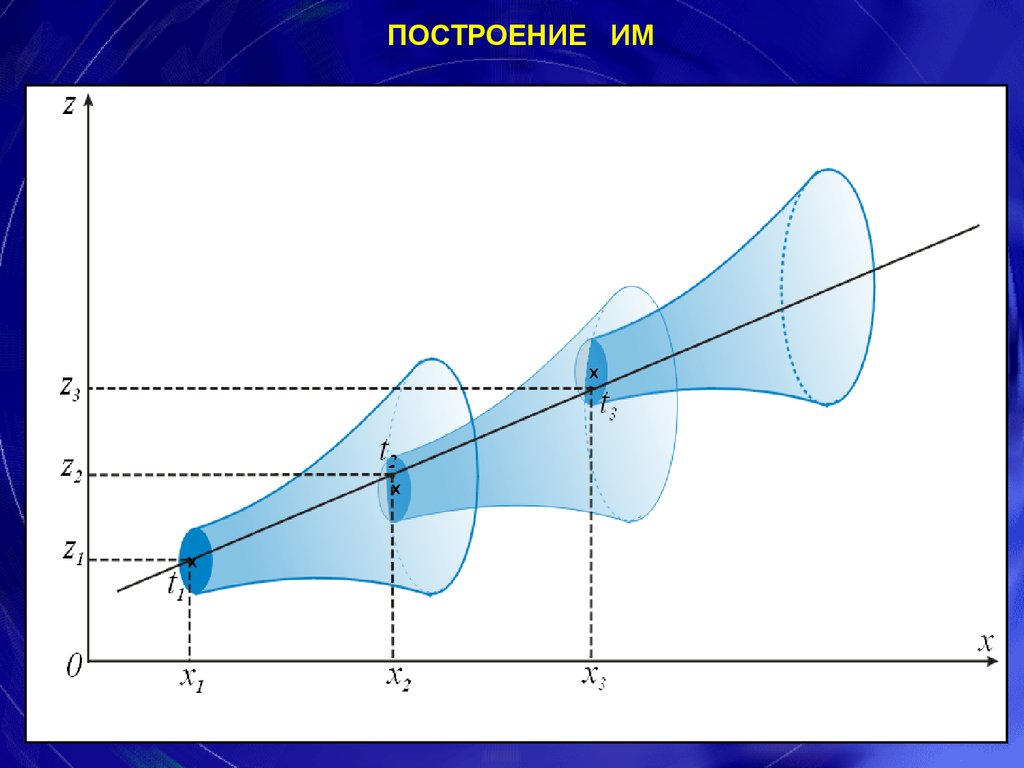
30.
ПОСТРОЕНИЕ ИМx
x
x
31.
МНОЖЕСТВО ПРОГНОЗА И МНОЖЕСТВО НЕОПРЕДЕЛЕННОСТИ ЗАМЕРАмножество
прогноза
множество
неопределенности
информационное
множество
32.
СРЫВ СОПРОВОЖДЕНИЯ33.
АЛГОРИТМ ПОСТРОЕНИЯ ИНФОРМАЦИОННОЙ ТРУБКИНачало
Ввод исходных данных
Ввод очередного замера
Да
Нет
Замер
совместный
?
Вычисление статистик
Нет
( ) 1
Да
Построение ИМ
Переход
на альтернативную
модель
Расчет размеров
информационной
трубки
Расчет точечной
оценки
Нет
Окончани
е
работы?
Да
Конец
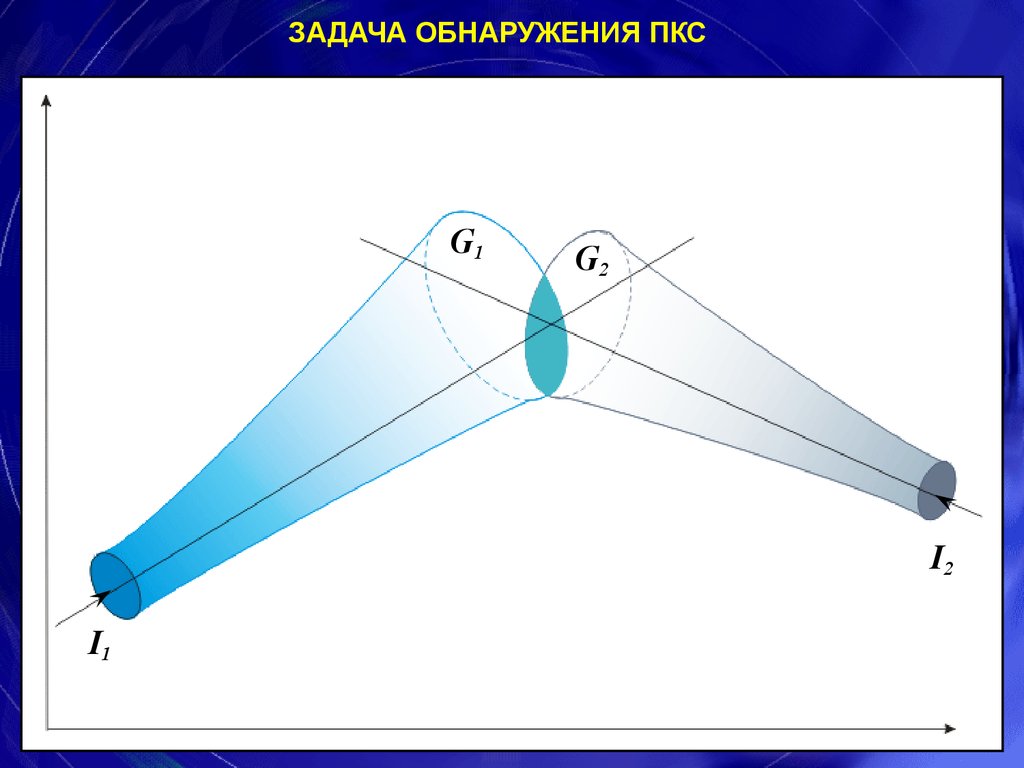
34.
ЗАДАЧА ОБНАРУЖЕНИЯ ПКСG11
G
G2
I2
I1
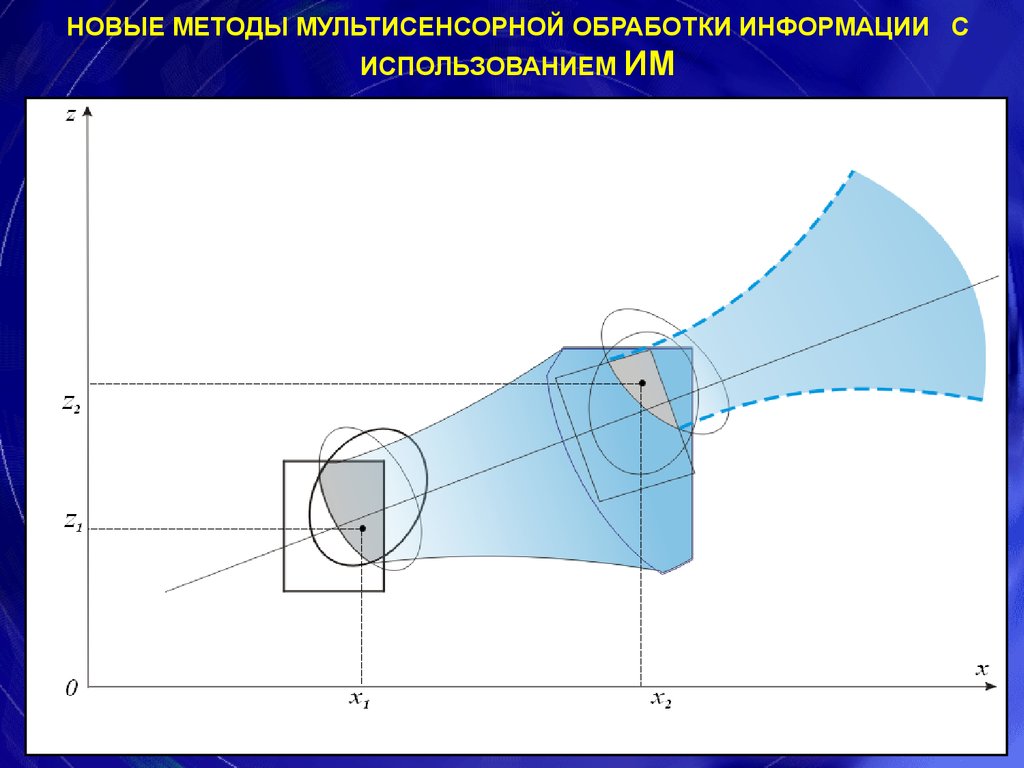
35.
НОВЫЕ МЕТОДЫ МУЛЬТИСЕНСОРНОЙ ОБРАБОТКИ ИНФОРМАЦИИ СИСПОЛЬЗОВАНИЕМ ИМ
36.
НОВЫЕ МЕТОДЫ МУЛЬТИСЕНСОРНОЙ ОБРАБОТКИ ИНФОРМАЦИИ СИСПОЛЬЗОВАНИЕМ ИМ
37.
СРАВНЕНИЕ ФИЛЬТРОВХарактер помехи сильно отличается от нормального (скачки)
Получение гарантированной оценки (отсутствия срывов сопровождения), особенно при
маневрах (внеплановых)