








 Программное обеспечение
Программное обеспечениеПохожие презентации:










Самодельный робот-манипулятор с дистанционным управлением
1. Самодельный робот-манипулятор с дистанционным управлением
Презентацию для конкурса«Кулибины» подготовил
Ученик 10 «БЛ» класса
МБОУ «СШ №1»
Кузнецов Максим
2.
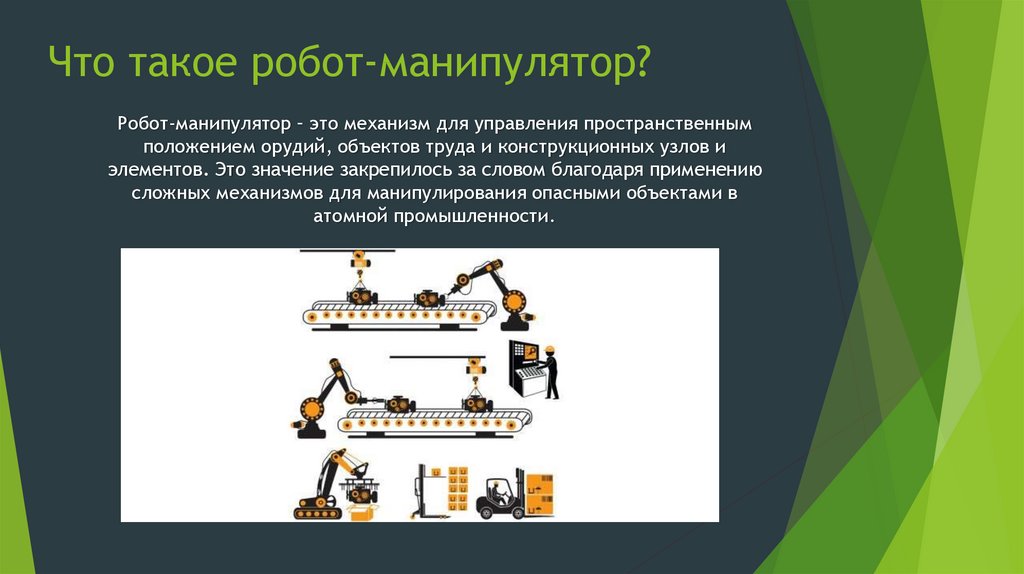
Что такое робот-манипулятор?Робот-манипулятор – это механизм для управления пространственным
положением орудий, объектов труда и конструкционных узлов и
элементов. Это значение закрепилось за словом благодаря применению
сложных механизмов для манипулирования опасными объектами в
атомной промышленности.
3.
Зачем нам делать свой собственныйманипулятор и в чём его отличие от
промышленных?
Промышленные манипуляторы не
предназначены для использования в
некоммерческих целях. Они дорогие,
массивные, опасные и из-за этого не
используются в домах. Тогда каким
должен быть домашний манипулятор
и какую работу должен выполнять?
4.
Каким должен быть манипулятор?Робот должен быть небольших размеров, но достаточно поворотливым для
выполнения команд. Ради популяризации и общедоступности придется
сильно удешевить как сам манипулятор, так и его производство. Нужно
будет использовать легкие и прочные материалы, такие как: фанера,
пластмасса, углеводородные материалы, стеклоткань, легкие сплавы и др.
Манипулятор должен быть сборным и
разборным, что положительно
скажется на их производстве, а если
пользователь не захочет собирать
прибор сам, то можно будет заказать
мастера.
5.
Также нужно дать пользователям возможность самим дополнять нашегоробота, дать возможность подключать электронные компоненты, которые
нужны лично ему. К примеру: камеру, часы, динамики, датчики света,
светодиоды, дополнительные колени и многое др.
6.
Теперь самый главный вопрос, азачем людям нужен манипулятор?
Главным образом манипуляторы
нужны для людей с ограниченными
возможностями: что-то подать,
принести, достать с верхней полки,
просто подержать. Для остальных
манипуляторы могут пригодиться в
основном для удалённых работ. Вы
дистанционно подключаетесь к
манипулятору и, управляя им,
например, закрываете окно. Это лишь
небольшая часть практических
функций для манипулятора. Но ведь
его можно использовать и для
развлечений, для игр.
7.
Итак, что у нас уже естьМатериалом для корпуса, ввиду свой
практичности и доступности, была
выбрана фанера.
Для максимальной гибкости, подвижности и
грузоподъёмности были выбраны коллекторные
двигатели с редуктором, управлять которыми будет
среда ардуино через плату L298N, благодаря чему
проект получиться дешевым и легко видо- или
програмноизменяемым.
8.
Первая модель, длянаглядности и простоты будет
управляться дистанционно
через ИК пульт
9.
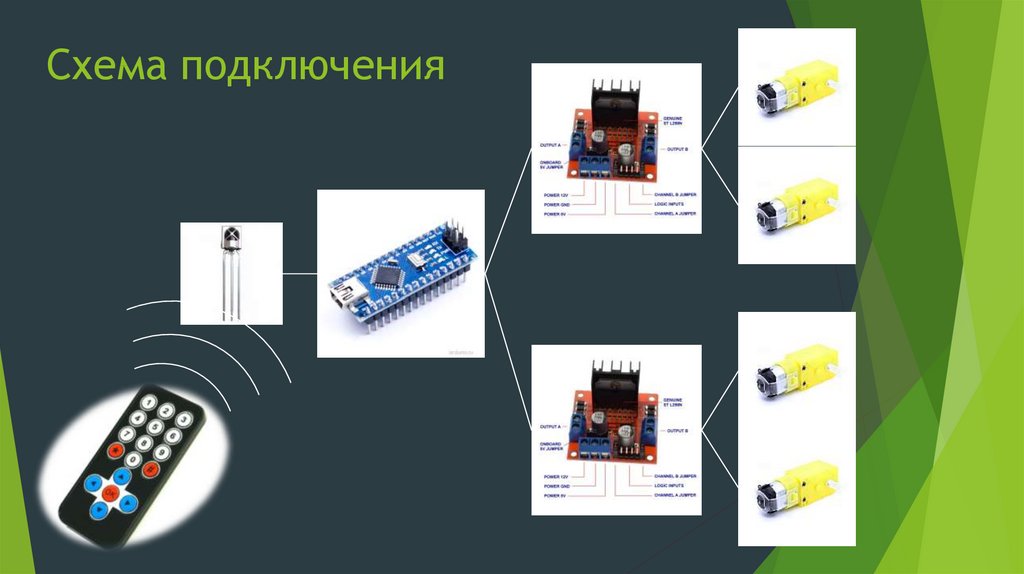
Схема подключения10.
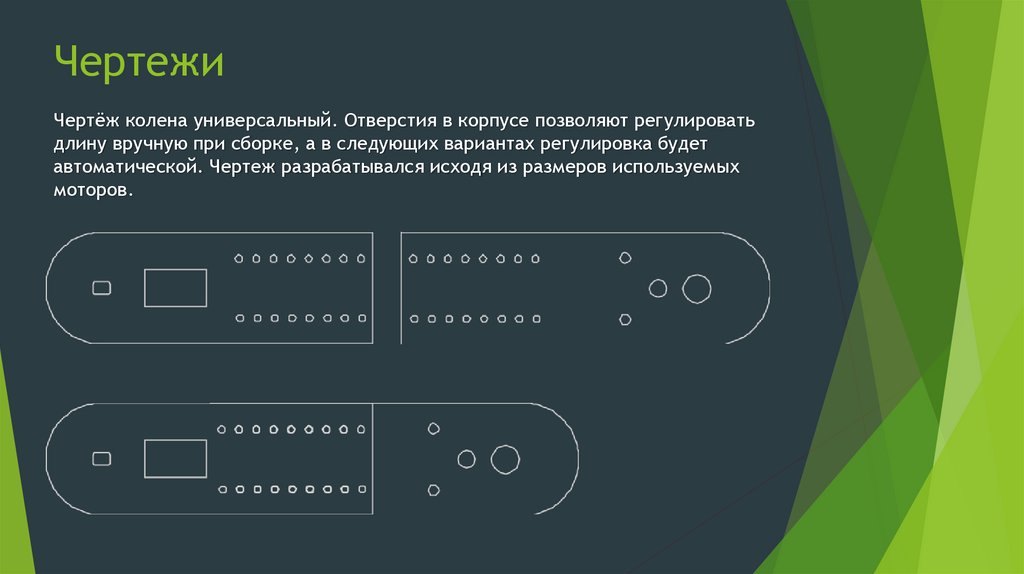
ЧертежиЧертёж колена универсальный. Отверстия в корпусе позволяют регулировать
длину вручную при сборке, а в следующих вариантах регулировка будет
автоматической. Чертеж разрабатывался исходя из размеров используемых
моторов.
11.
КлешняВарианты клешней с сервомашинкой.