




 Электроника
ЭлектроникаПохожие презентации:








")

Структурная схема ДЗ (эсэ)
1.
LкК
Q
Q
Q
ТV
а в с
А
В
С
Iв
YАТ
Iа + ОТ
КZАВ КL1
ТАV
КТ
_
ТV1
Iв
Iс
Iс
ТV1
Iа
ТV1
Uав КZ
ВС
ТАV
Uвс КZ
СА
ТАV
+ ОТ
КL2
_
+ ОТ
+ ОТ
Uса
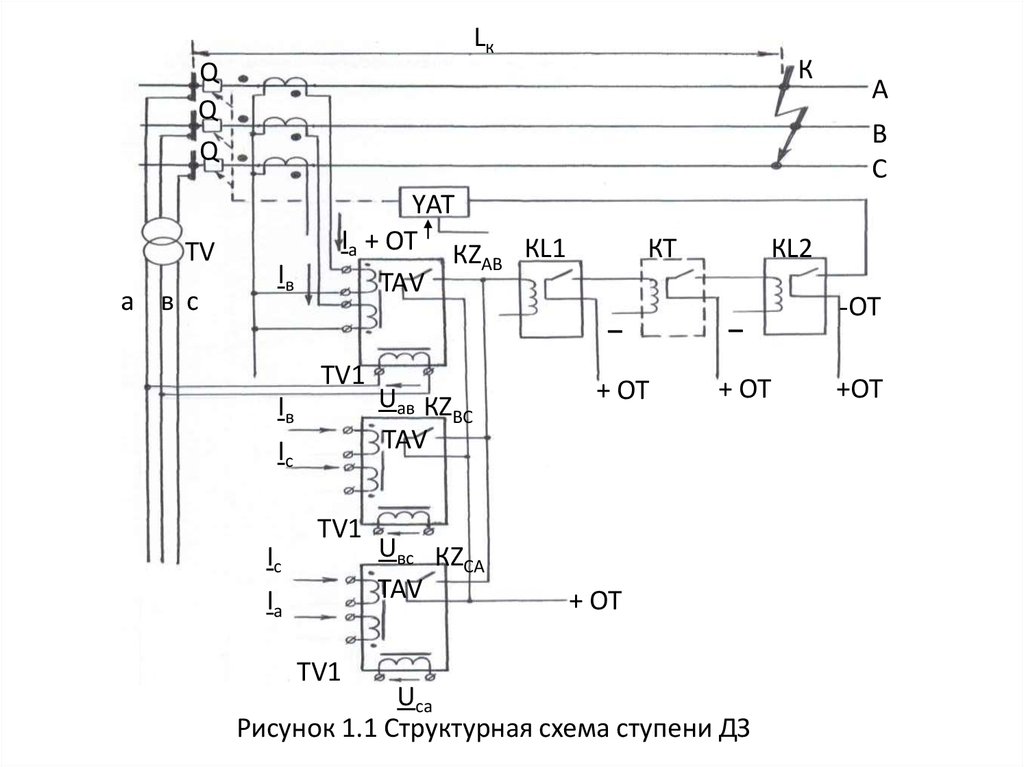
Рисунок 1.1 Структурная схема ступени ДЗ
-ОТ
+ОТ
2.
UшZ л,потр
3 Iф
U ав
Iа I в
U ш. м ф
3 I к ,ф
I к ,ф Z к
I к ,ф
Uр
Iр
Zp
(1.1)
(1.2)
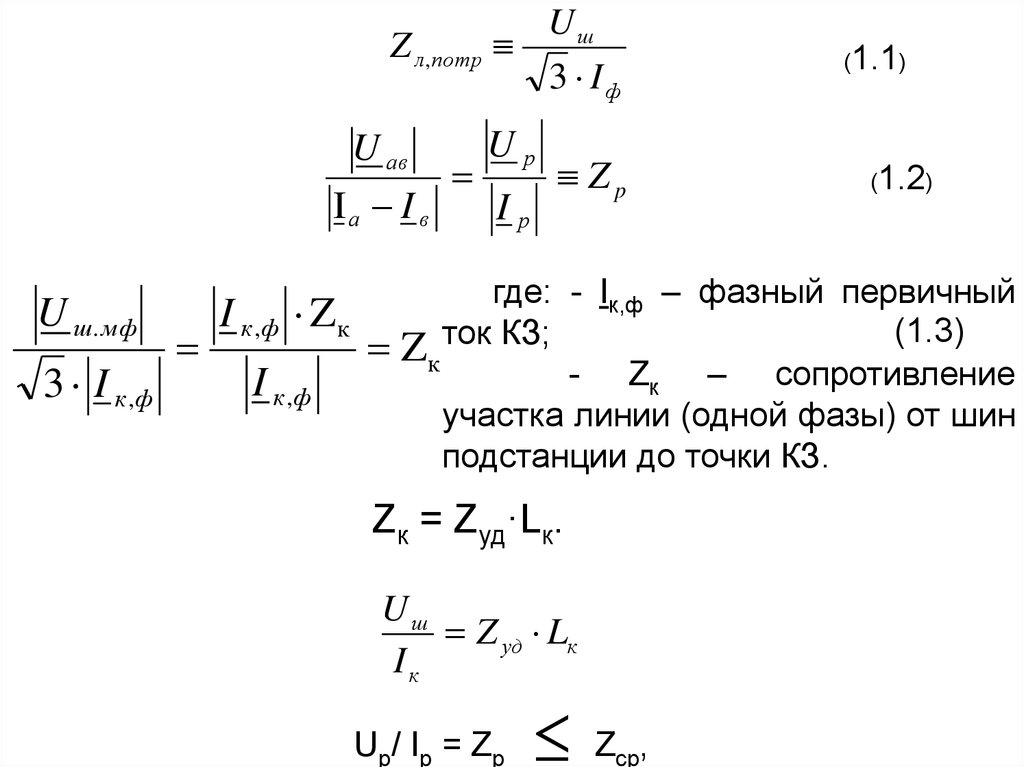
где: - Iк,ф – фазный первичный
(1.3)
Zк ток КЗ;
- Zк – сопротивление
участка линии (одной фазы) от шин
подстанции до точки КЗ.
Zк = Zуд·Lк.
Uш
Z уд Lк
Iк
Uр/ Iр = Zр
Zср,
3.
GAKZ1
A
Q1 К4
W1
Uр
Iр
КЗ
«а»
AKZ2
БQ3
К2
W2
«б»
AKZ3
ВQ5
К1 W3
«в»
U'р
Iр
I pV
Z p Z p Z p Z pV
Uр
I p
U p
U pV
U p
I p
I'р
Lк
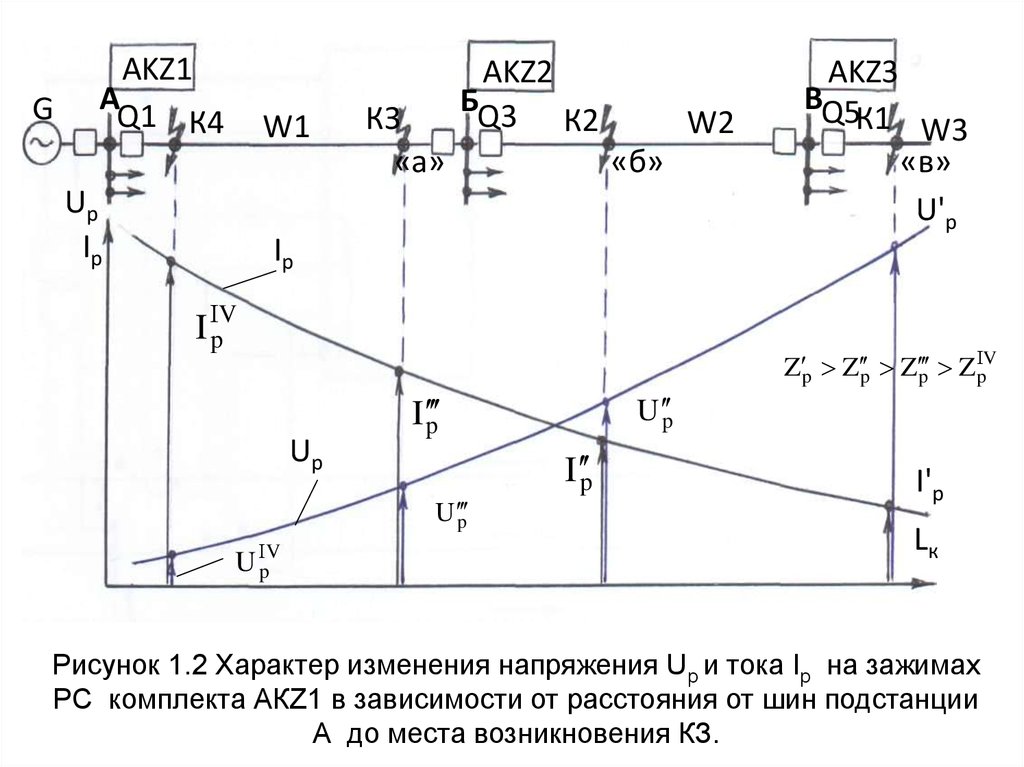
Рисунок 1.2 Характер изменения напряжения Uр и тока Iр на зажимах
РС комплекта АКZ1 в зависимости от расстояния от шин подстанции
А до места возникновения КЗ.
4.
AG
АКZ1
Q1
Б
АКZ2
В
Q3
W1
W2
«а»
W3
Z
cp
Z cp
t
Q5
«б»
t t
cp
АКZ3
Z cp (0,8 0,9)ZW1
t
cp
t cp
ℓ(Z)
tоткл, ( t KZ t KL1 t KL 2 ) tоткл.ВВ tср АКZ1 tсрAKZ1 0,5c; tср АКZ1 tср АКZ1 0,5c.
Рисунок 1.3 Ступенчатая характеристика
дистанционной защиты
5.
3 I к ,ф Z кU АВ
U p U ав
KU
KU
(1.4)
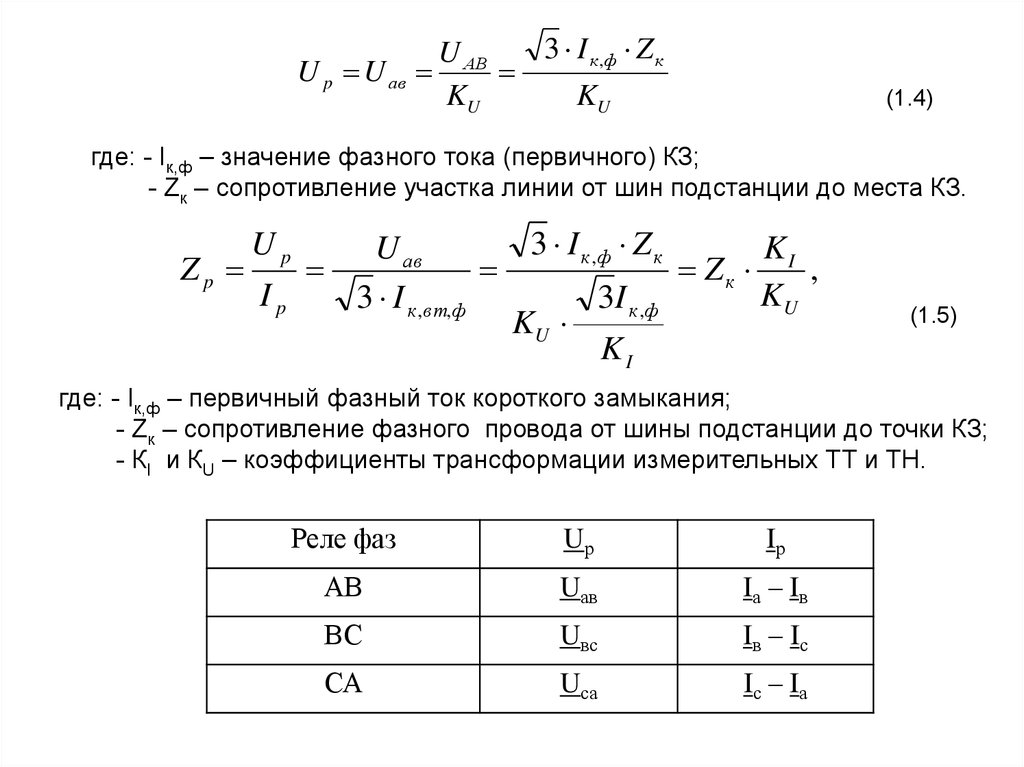
где: - Ік,ф – значение фазного тока (первичного) КЗ;
- Zк – сопротивление участка линии от шин подстанции до места КЗ.
Zp
Up
Ip
3 I к ,ф Z к
U ав
KI
Zк
,
KU
3 I к ,вт,ф
3I к ,ф
KU
KI
(1.5)
где: - Ік,ф – первичный фазный ток короткого замыкания;
- Zк – сопротивление фазного провода от шины подстанции до точки КЗ;
- КІ и КU – коэффициенты трансформации измерительных ТТ и ТН.
Реле фаз
Uр
Iр
АВ
Uав
Iа – Iв
ВС
Uвс
Iв – Iс
СА
Uса
Iс – Iа
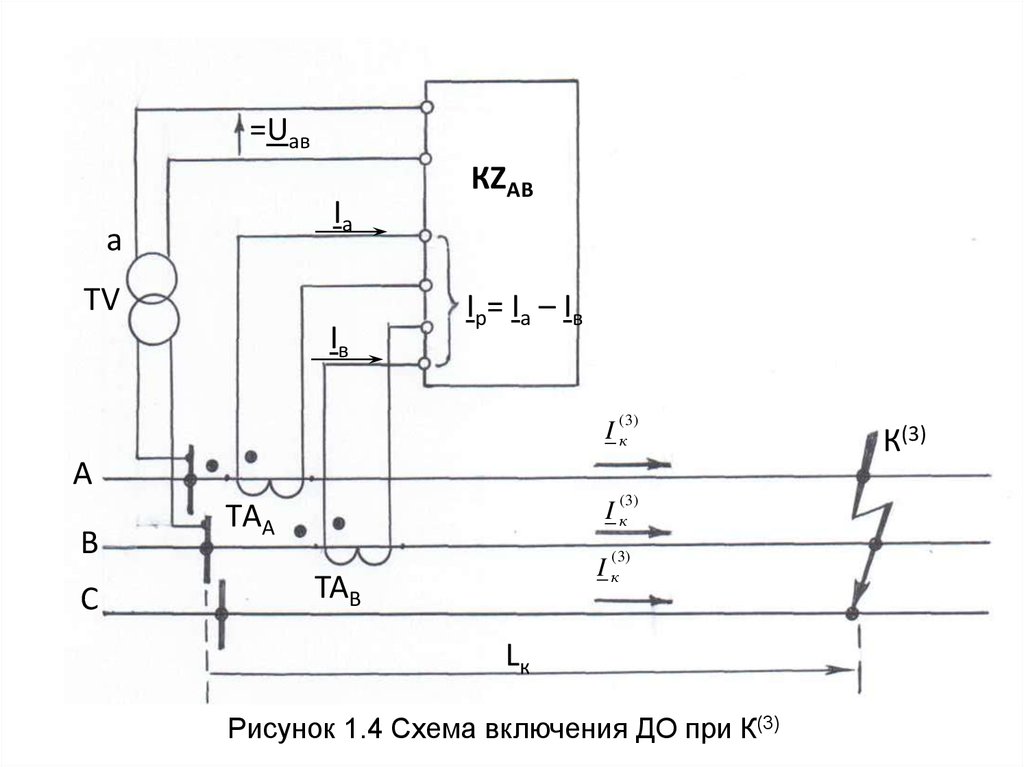
6.
=UавІа
а
ТV
Ів
КZАВ
Ір= Іа – Ів
( 3)
Iк
А
В
С
( 3)
ТAA
Iк
( 3)
Iк
ТАВ
Lк
Рисунок 1.4 Схема включения ДО при К(3)
К(3)
7.
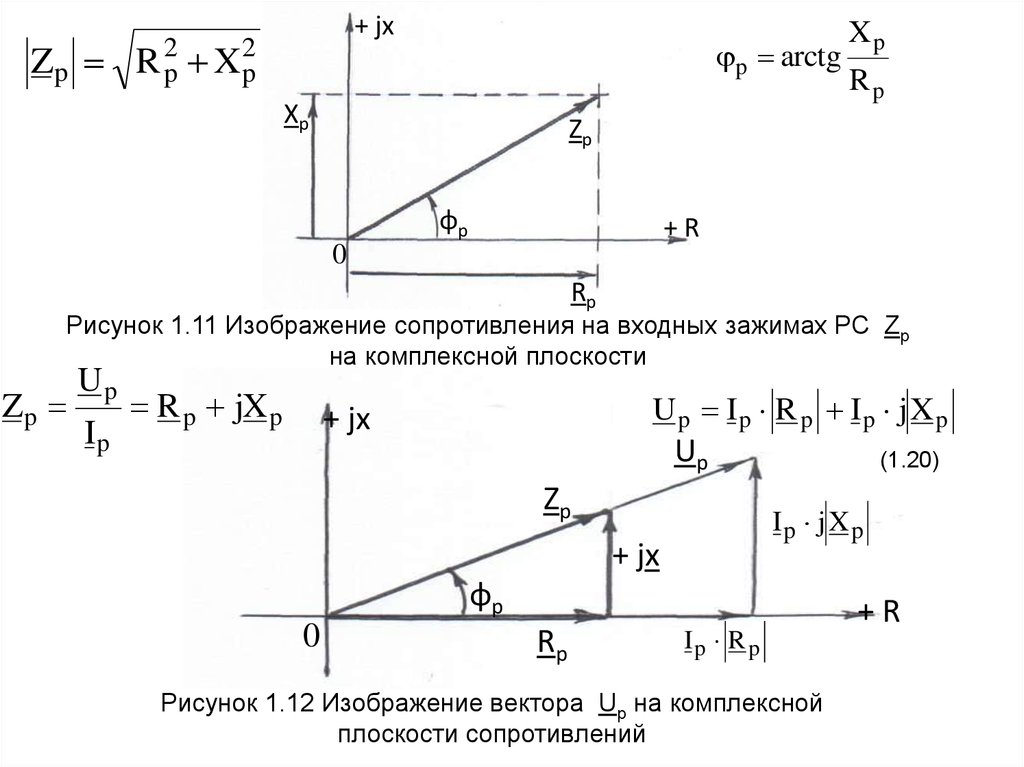
ZpR 2p
+ jx
X 2p
p arctg
Xp
Xp
Rp
Zp
φp
+R
0
Rp
Рисунок 1.11 Изображение сопротивления на входных зажимах РС Zр
на комплексной плоскости
Up
Zp
R p jX p + jx
U p Ip R p Ip j X p
Ip
U
(1.20)
p
Zp
Ip j Xp
+ jx
φp
0
Rр
Ip R p
Рисунок 1.12 Изображение вектора Uр на комплексной
плоскости сопротивлений
+R
8.
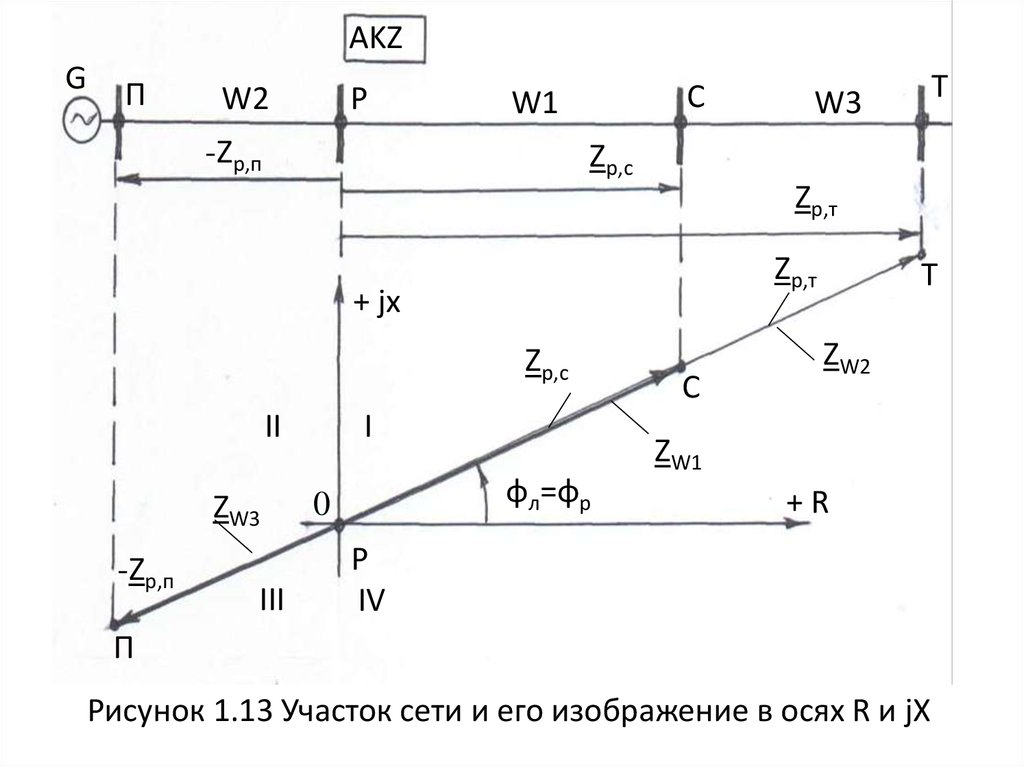
AKZG
П
W2
Р
С
W1
-Zp,п
Т
W3
Zp,с
Zp,т
Zp,т
+ jx
Zp,с
II
ZW3
-Zp,п
III
I
ZW2
ZW1
φл=φp
0
С
Т
+R
Р
IV
П
Рисунок 1.13 Участок сети и его изображение в осях R и jX
9.
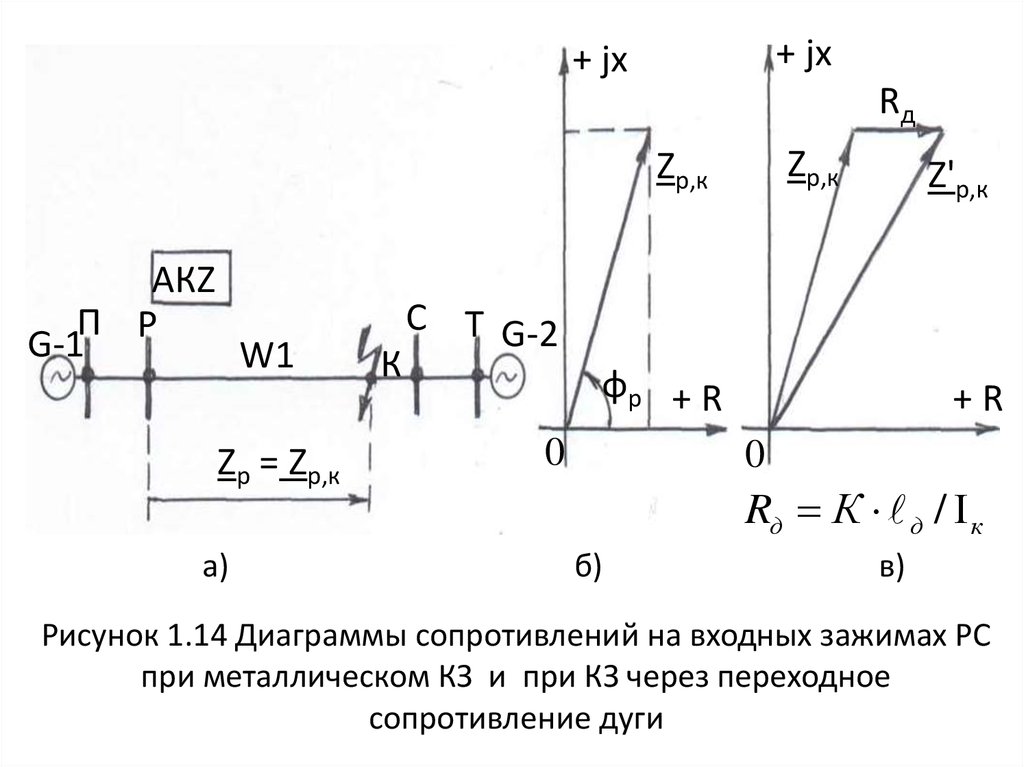
+ jx+ jx
Rд
Zp,к
Zp,к
АКZ
П Р
G-1
W1
Zp = Zp,к
а)
К
Z'p,к
С Т G-2
φp + R
0
+R
0
Rд К д / к
б)
в)
Рисунок 1.14 Диаграммы сопротивлений на входных зажимах РС
при металлическом КЗ и при КЗ через переходное
сопротивление дуги
10.
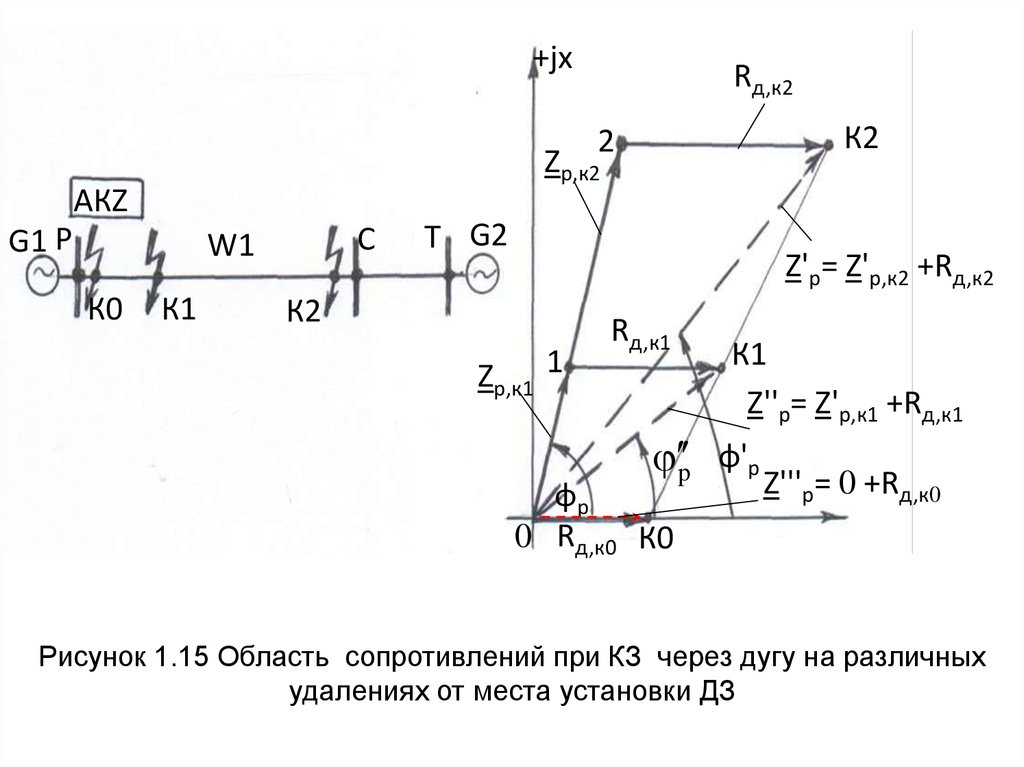
+jxRд,к2
К2
2
Zр,к2
АКZ
G1 Р
С
W1
К0
К1
Т G2
Z'р= Z'р,к2 +Rд,к2
К2
Zр,к1
1
Rд,к1
К1
Z''р= Z'р,к1 +Rд,к1
p φ'р
φр
0 Rд,к0 К0
Z'''р= 0 +Rд,к0
Рисунок 1.15 Область сопротивлений при КЗ через дугу на различных
удалениях от места установки ДЗ
11.
Zср,+20°+б Zср,+10°
φм.ч.+20°
АКZ
G Р
+а
φм.ч.+10°
φр=φм.ч. К3
φм.ч.=65°
φм.ч.=55°
φм.ч.-10°
φм.ч.-20°
φм.ч.=45°
+R
Lр,к
К2
Zср,-10°
-а
1
К
С
Zср,max при φр
=φм.ч.
-б
Zср,-20°
Рисунок 1.16, поясняющий зависимость величины Zр
(сопротивление на зажимах РС) от значения φр
12.
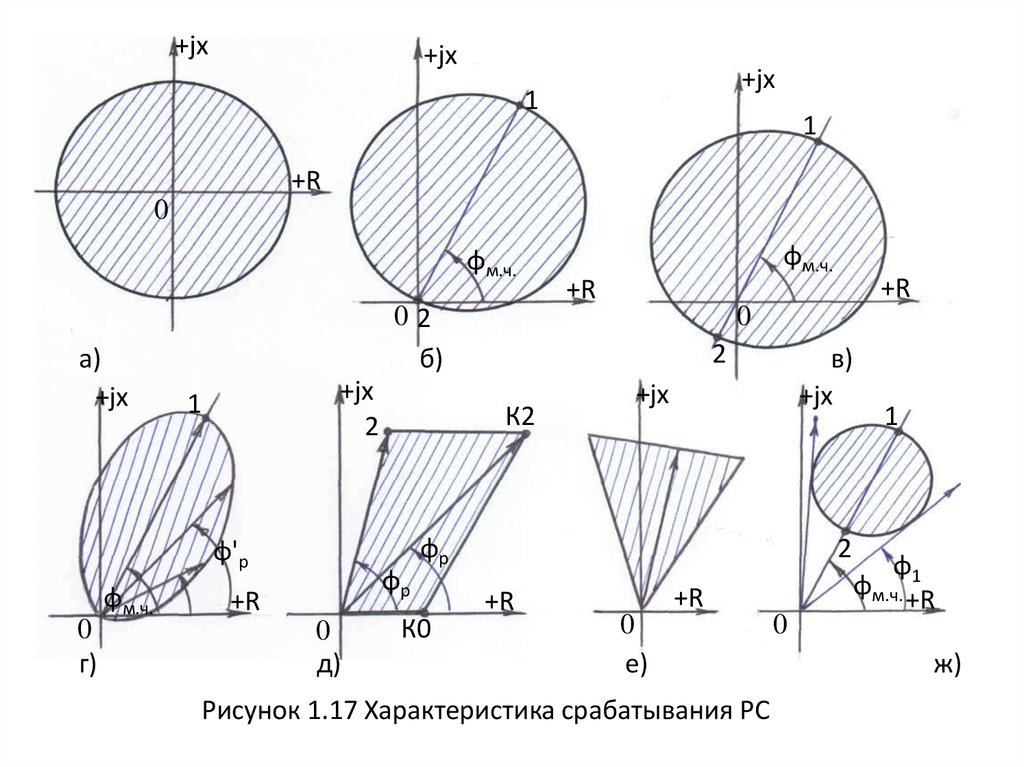
+jx+jx
+jx
1
1
+R
0
φм.ч.
а)
+jx
02
б)
+jx
2
1
φ'р
0
г)
φм.ч.
+R
0
д)
+R
в)
+jx
+jx
φр
К0
+R
0
2
К2
φр
φм.ч.
2
+R
0
е)
+R
Рисунок 1.17 Характеристика срабатывания РС
0
1
φ1
φм.ч.
+R
ж)
13.
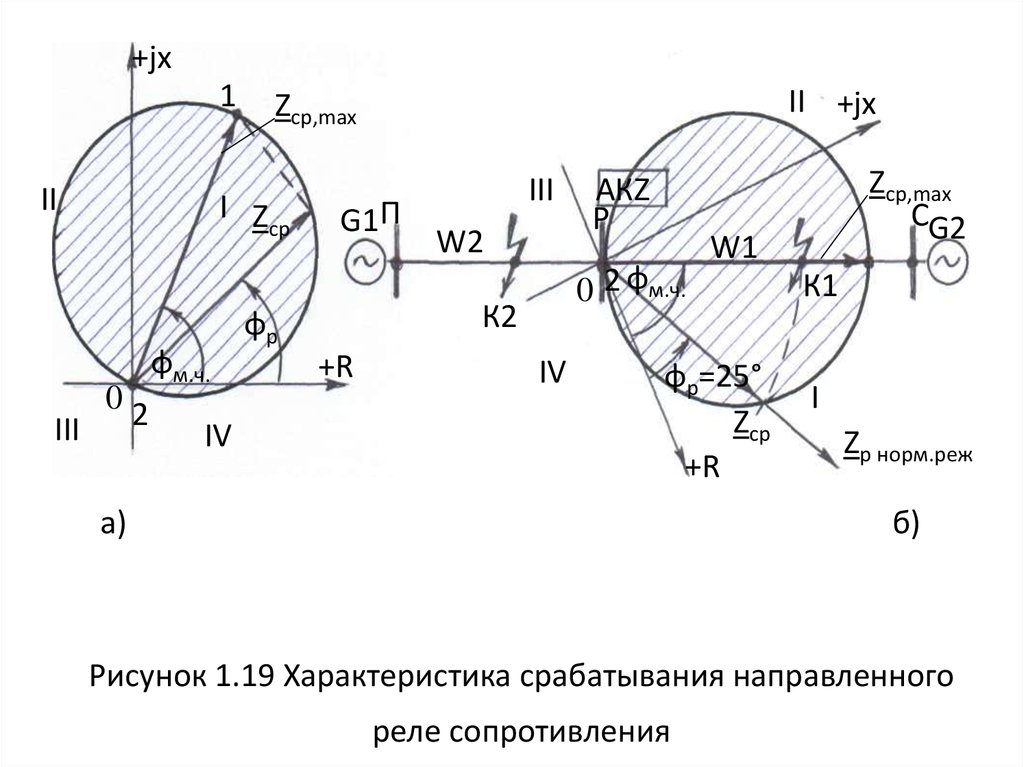
+jx1
II
III
I Z
ср
02
φм.ч.
IV
II +jx
Zср,max
G1П
III
W2
0 2 φм.ч.
К2
φр
+R
АКZ
Р
IV
W1
φр=25°
Zср
+R
a)
Zср,max
СG2
К1
I
Zр норм.реж
б)
Рисунок 1.19 Характеристика срабатывания направленного
реле сопротивления
14.
III
G1 П
W2
«2»
+jx
Zср
АКZ
C T G2
W1
W3
«1»
φм.ч
III
+jx
C «1» Z'
r
φм.ч
IV
+R
I
II
III Z''ср «2»
+R
IV
a)
б)
Рисунок 1.20 Характеристика срабатывания реле сопротивления
в третий квадрант
15.
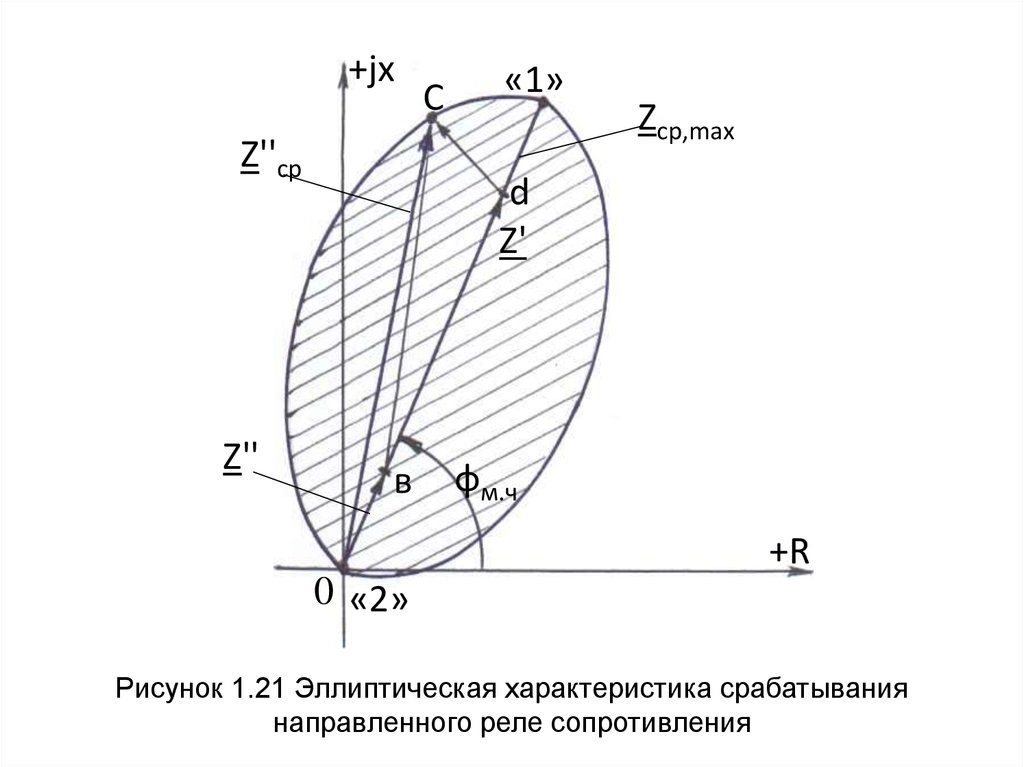
+jxZ''ср
Z''
С
«1»
Zср,max
d
Z'
в
φм.ч
+R
0 «2»
Рисунок 1.21 Эллиптическая характеристика срабатывания
направленного реле сопротивления
16.
a 10Hб
0% 2H
в
R19
20%
R15
VD3
L1
0,5
в
4Н
а б
C1
R1
TАV
0,25
0,5
1,0
65°
W"2
R2
VD1
VS1
R7
6H
X3
1%
0,65 0,8 1,5
9Н
20%
40%
60%
80%
R6
НИ
C2
VD2
80°
TV1
R16 R17
VS2
15%
10%
5%
0%
R9 H8
R10
R11
0,25
R3
0,5
1,0 W' 65%
X2 2
80° Uав
R12
65°
R25
R26
R8
R13
W"2
R4
TV2
6в
80% R5
5H
7H 2в
R24
R5
X1
4в
0%
6% 1H
12%
20%
W'2 W1 С4
Рисунок 2.7 Схема внутренних соединений РС КРС-2
8в
17.
G1+jx
Iк1 AKZ
2
W1
K1
1
W2
Iк2
G2
K2
φp= φм.ч.=80°
+R
- КI·Iр
КU·Uр
Uраб
Uторм
|Uраб|>|Uторм|
Uраб
+ КI·Iр
КU·Uр
Uторм= КU·Uр+ КI·Iр
|Uторм| > |Uраб|
18.
ХВ1контроль
R2
Iа
+5%
R6
R1 R3 R4
-6%
R8
Iв
ДТ
-0,5
-0,25
-20%
-100%
VD2
3
УЗЕЛ ИЗМЕРЕНИЯ
R12
УЗЕЛ
ВЫХО
ДА
-7,5В
УЗЕЛ СРАВНЕНИЯ
R19
SВ4
А2
А5
U2
С2
R17
ХР2
SВ7
R11
12
6
t-
R38
φмч=65º(80º)
ХВ6
t+
ФИН
SВ6
UН=КU·Uр
R51
(-10В)
ХВ5
Iz2
25
R50
0,75
VD1
R18
100
50
Uав
SВ5
R14
ХР3
U1
SВ8
R10
ХВ2 N%
ТV1
А4
0,5
R9
II
ХР1
С1
R16
R15
-12%
1
R13
А1
φмч=65º(80º)
R7
SВ1 SВ2
ДН
Iz1
SВ3
R49
ХВ3
ФИЛЬТР-СУММАТОР
R5
ТА1
+5%÷+50%
ХР4
смещение
R41
R21
R22
С3
С4
КОНТУР
ПАМЯТИ
АЗ
поляризация
УЗЕЛ ФОРМИРОВАНИЯ
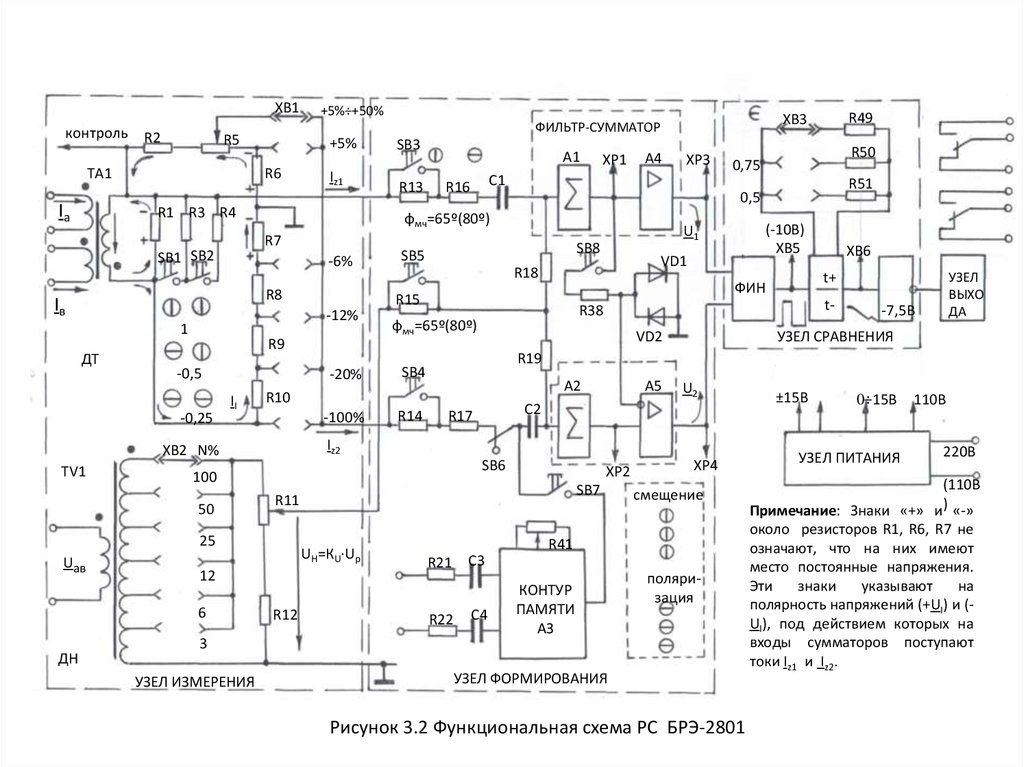
Рисунок 3.2 Функциональная схема РС БРЭ-2801
±15В
0÷15В
УЗЕЛ ПИТАНИЯ
110В
220В
(110В
Примечание: Знаки «+» и ) «-»
около резисторов R1, R6, R7 не
означают, что на них имеют
место постоянные напряжения.
Эти
знаки
указывают
на
полярность напряжений (+UІ) и (UІ), под действием которых на
входы сумматоров поступают
токи Iz1 и Iz2.
19.
+jx1
+jx
+jx
1Z
уст.
Zуст.ном
1
Zуст.
x'
φм.ч
5%
2
50% +R
2
5%
+R
+R
2
б)
а)
в)
+jx
1
+jx
+jx
1
+R
1
ε
ε
100%
ε
2
+R
+R
6%
12%
20%
г)
д)
е)
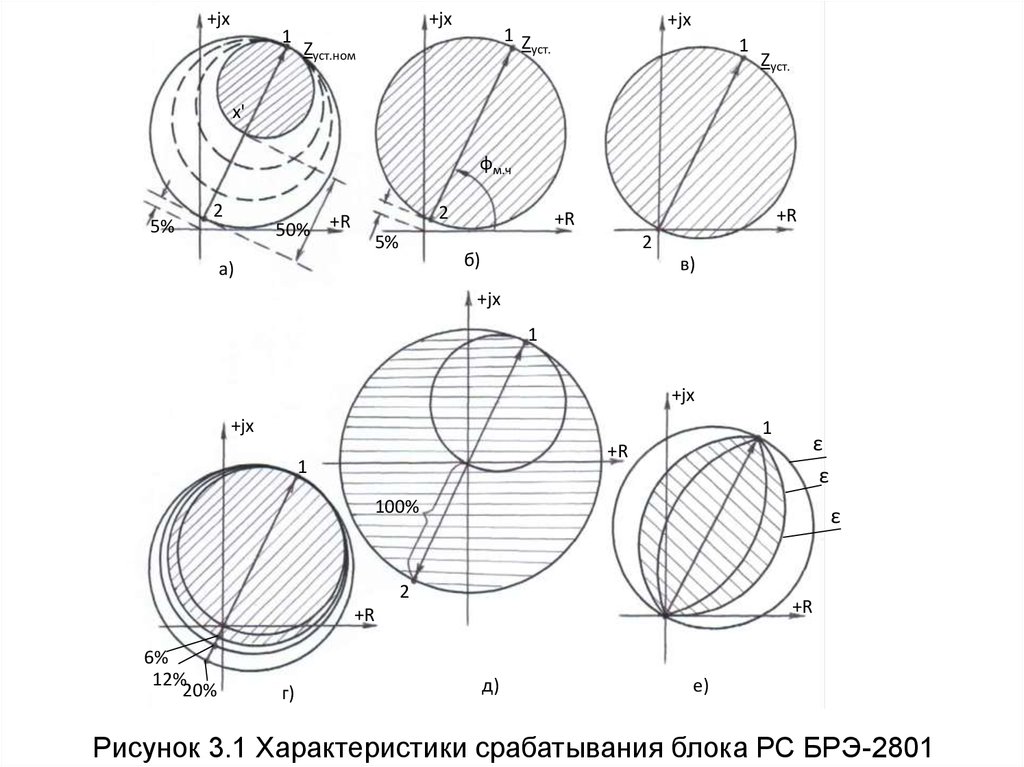
Рисунок 3.1 Характеристики срабатывания блока РС БРЭ-2801
20.
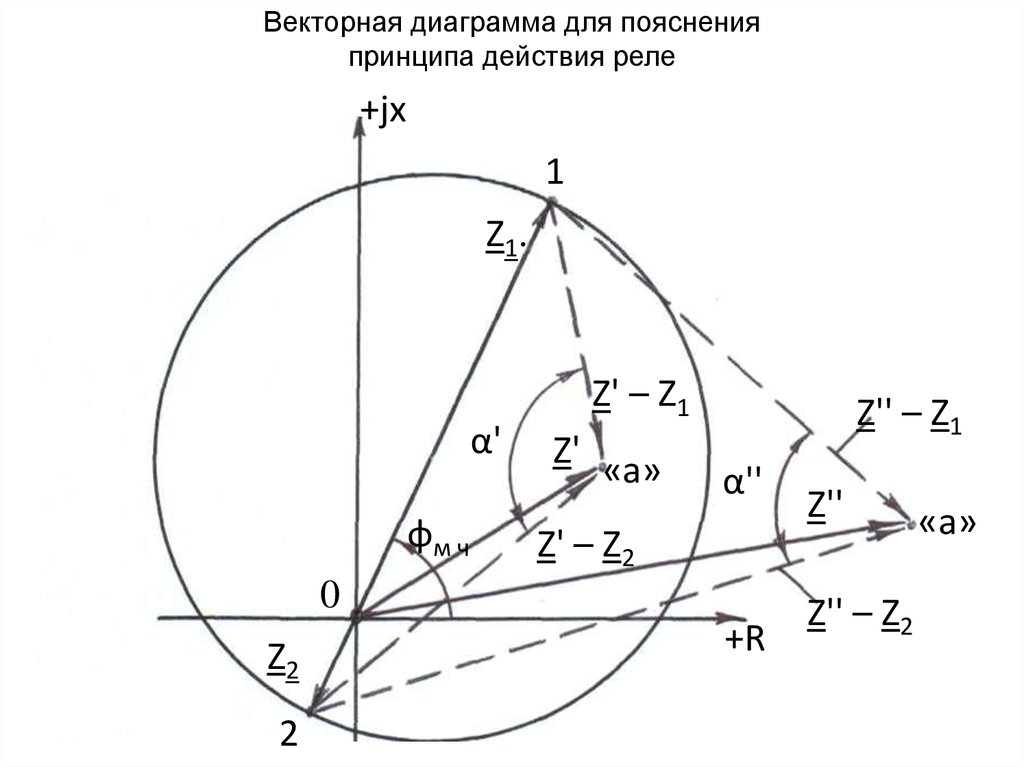
Векторная диаграмма для поясненияпринципа действия реле
+jx
1
Z1.
Z' – Z1
α'
φм ч
Z'
«а»
Z'' – Z1
α''
Z' – Z2
0
Z2
2
+R
Z''
Z'' – Z2
«а»
21.
+jx.
Z1 1
<d >2
a
Z''
a
αф
a
Z'' – Z1
αф
a
90ºa
+R
a
Z'' – Z2
2 Z2
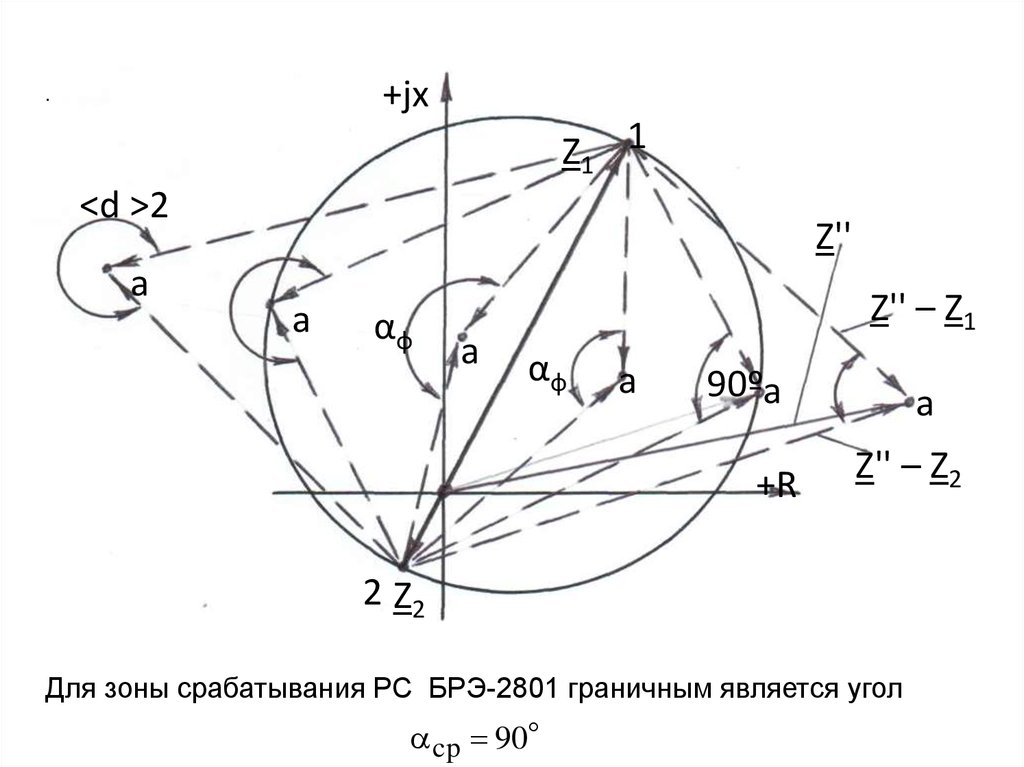
Для зоны срабатывания РС БРЭ-2801 граничным является угол
cp 90
22.
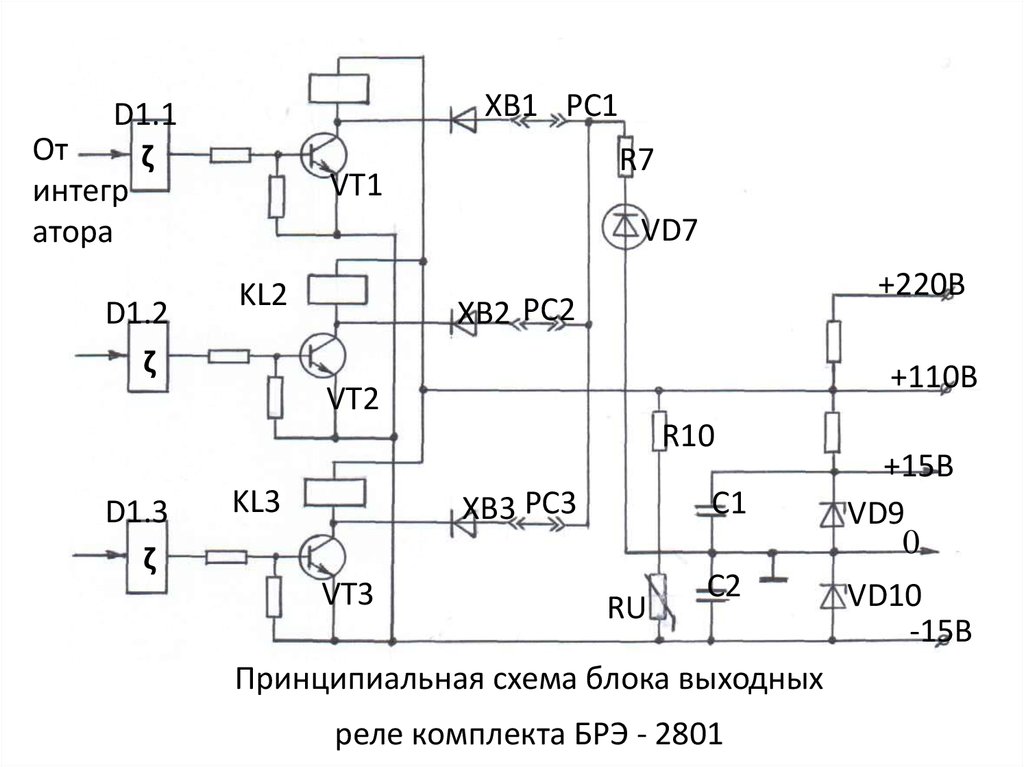
ХВ1 РС1D1.1
От
ζ
интегр
атора
D1.2
ζ
R7
VT1
VD7
KL2
+220В
ХВ2 РС2
+110В
VT2
R10
D1.3
ζ
KL3
ХВ3 РС3
VT3
С1
RU
С2
Принципиальная схема блока выходных
реле комплекта БРЭ - 2801
+15В
VD9
0
VD10
-15В