

 БЖД
БЖДПохожие презентации:



")






В. А. Каштанов, О. Б. Зайцева О минимаксных подходах в задачах безопасности
1.
В. А. Каштанов, О. Б. ЗайцеваО МИНИМАКСНЫХ ПОДХОДАХ В
ЗАДАЧАХ БЕЗОПАСНОСТИ
Копылов Михаил
Высшая школа экономики, Москва, 2018
www.hse.ru
2.
АннотацияВ статье исследуется модель управляемого полумарковского
процесса с катастрофами применительно к проблеме
безопасности.
фото
Создается математическая модель
Вводятся характеристики (показатели) безопасности.
Устанавливается связь характеристик надежности и
характеристик безопасности.
Анализируется ситуация выбора оптимальной стратегии
управления в условиях неполной информации о характеристиках
надежности системы.
фото
Высшая школа экономики, Москва, 2018
3.
Проблемабезопасности
Безопасность - свойство процесса функционирования системы.
фото
Основная проблема заключается в выработке стратегии управления
процессами функционирования и существования (эволюции)
субъектов, которая обеспечивала бы оптимальное в каком-то смысле
течение этих процессов
фоо
фото
Высшая школа экономики, Москва, 2018
4.
Управляемый полумарковский процесс скатастрофами
Управляемый полумарковский процесс с катастрофами:
Y (t )=(ξ (t) , u( t) , θ(t ) , η(t )),
фото
ξ(t )=ξν (t ) ,
u( t)=uν (t )+ 1 ,
о
θ( t)=θ ν(t )+1 ,
η( t)=ην (t )+1 ,
ν (t)=sup {n : ∑ θ k ≤t } - считающий процесс
k ≤n
θ 0=0
Высшая школа экономики, Москва, 2018
фото
5.
Управляемый полумарковский процесс скатастрофами
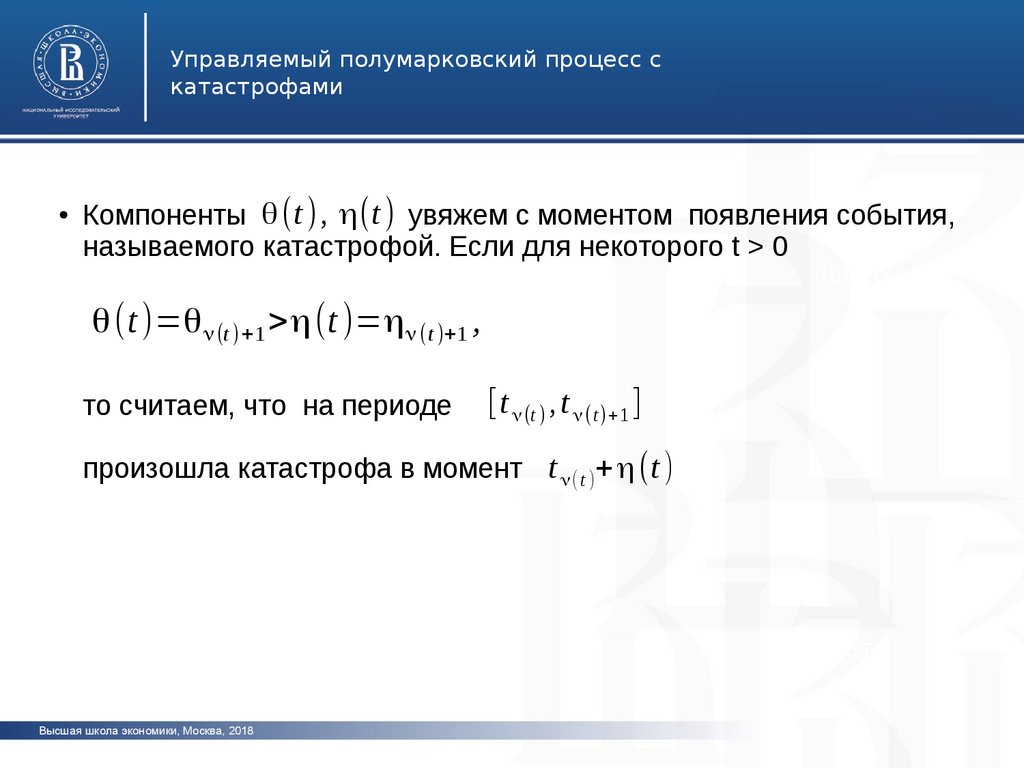
Компоненты θ (t), η(t) увяжем с моментом появления события,
называемого катастрофой. Если для некоторого t > 0
фото
θ (t)=θ ν (t )+1 >η(t)=ην (t )+1 ,
то считаем, что на периоде
[t ν (t ) , t ν (t)+1 ]
о
произошла катастрофа в момент t ν (t )+ η(t)
фото
Высшая школа экономики, Москва, 2018
6.
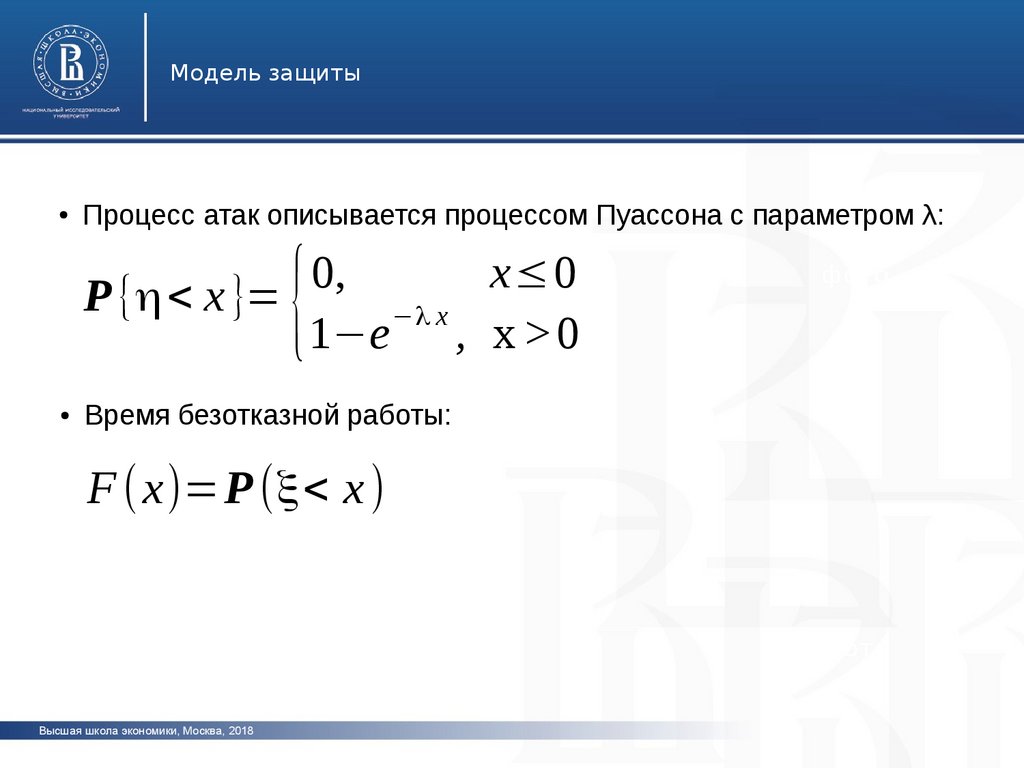
Модель защитыПроцесс атак описывается процессом Пуассона с параметром λ:
{
0,
x≤0
P {η< x }=
−λ x
1−e , x > 0
фото
Время безотказной работы:
F (x)=P (ξ< x )
о
фото
Высшая школа экономики, Москва, 2018
7.
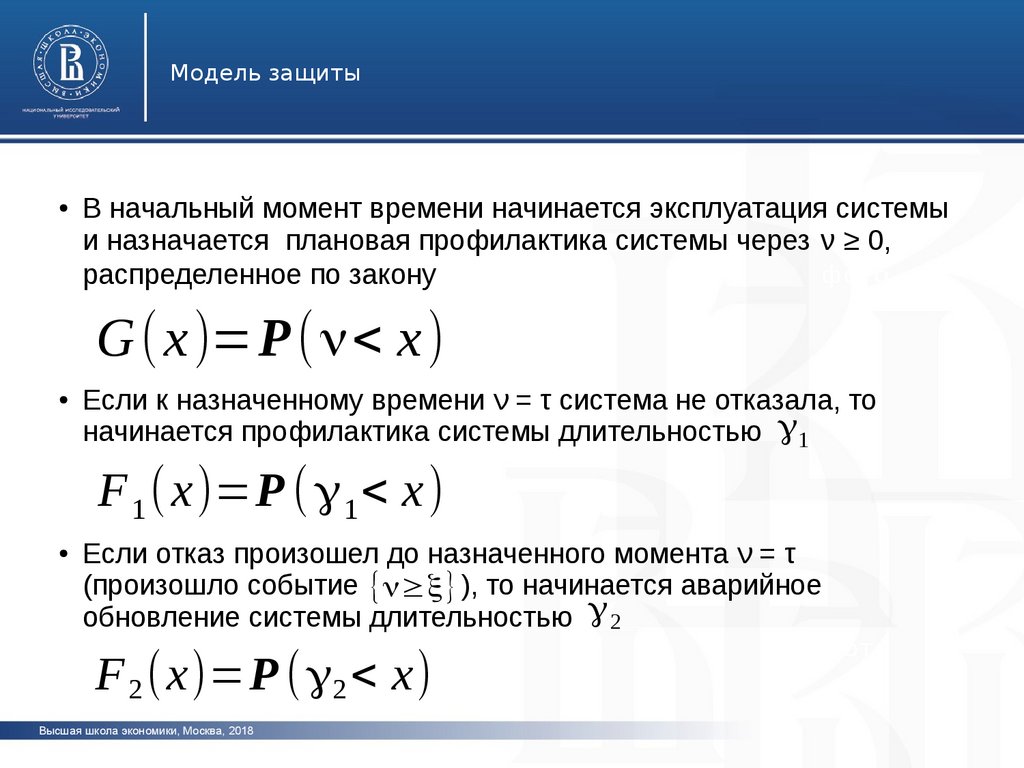
Модель защитыВ начальный момент времени начинается эксплуатация системы
и назначается плановая профилактика системы через ν ≥ 0,
фото
распределенное по закону
G ( x )=P ( ν< x )
Если к назначенному времени ν = τ система не отказала, то
начинается профилактика системы длительностью γ1
F 1 ( x)=P ( γ 1 < x)
о
Если отказ произошел до назначенного момента ν = τ
(произошло событие {ν≥ξ} ), то начинается аварийное
обновление системы длительностью γ 2
F 2 ( x)=P ( γ2 < x)
Высшая школа экономики, Москва, 2018
фото
8.
Построение управляемого полумарковского процессас катастрофами
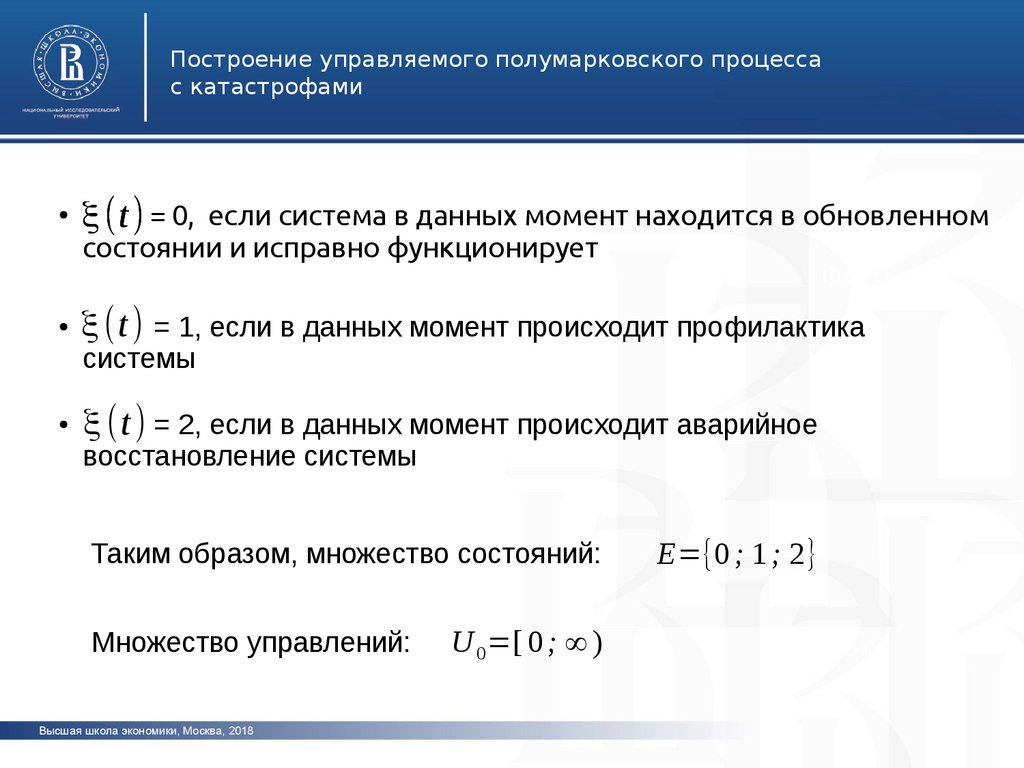
ξ (t) = 0,
если система в данных момент находится в обновленном
состоянии и исправно функционирует
фото
ξ (t) = 1, если в данных момент происходит профилактика
системы
ξ (t) = 2, если в данных момент происходит аварийное
о
восстановление системы
Таким образом, множество состояний:
Множество управлений:
Высшая школа экономики, Москва, 2018
U 0 =[ 0 ; ∞ )
E={0 ; 1 ; 2}
фото
9.
Построение полумарковского ядраQi 0 (t ,u)=P {ξ n+1 = 0, θn+1 < t | ξ n = i , θn = τ , un = u}
= P {γi < t }=F i (t ), i=1, 2
фото
Q ij (t ,u)= 0 , j=1, 2
Q01 (t ,u)=P {ξ n+1= 1, θn+1 < t | ξn = 0, θn =
τ , un = u}
о
u>t
= P {ν< t , ν≤ ξ | ν= u}= 0,
F̄ (u),
u≤ t
{
Q02 (t ,u)=P {ξ n+1= 2, θ n+1 < t | ξ n= 0, θ n= τ , un = u}
u>t
фото
= P {ν> ξ , t > ξ | ν= u}= F (t ),
F (u),
u≤ t
{
Высшая школа экономики, Москва, 2018
10.
Построение управляемого полумарковского процессас катастрофами
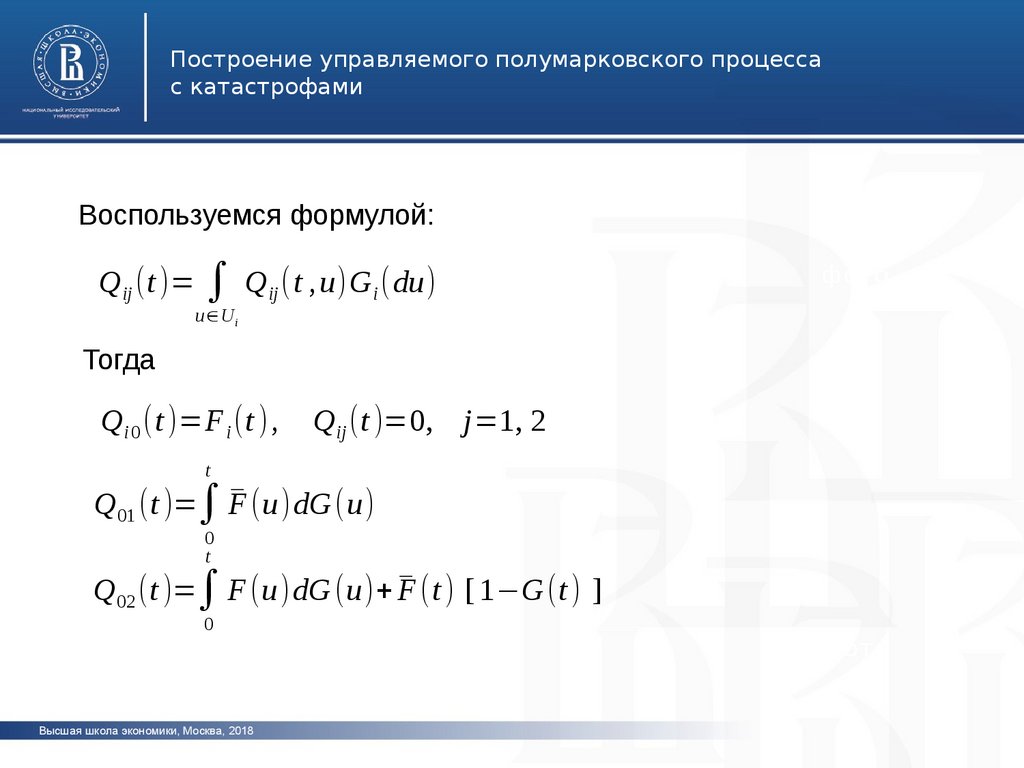
Воспользуемся формулой:
Q ij (t )=
∫
фото
Q ij (t ,u)G i (du)
u∈U i
Тогда
Q i 0 (t )=F i (t ),
Q ij (t )=0, j=1, 2
t
о
Q 01 (t )=∫ F̄ (u)dG (u)
0
t
Q 02 (t )=∫ F (u)dG (u)+ F̄ (t ) [ 1−G(t ) ]
0
Высшая школа экономики, Москва, 2018
фото
11.
Построение управляемого полумарковского процессас катастрофами
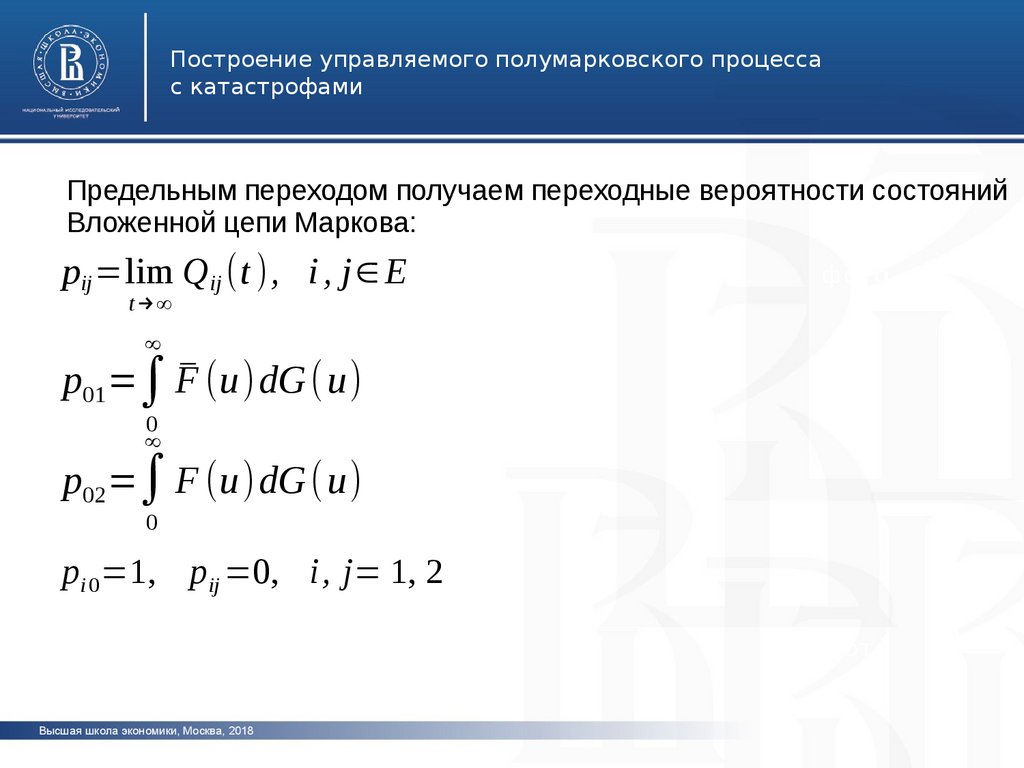
Предельным переходом получаем переходные вероятности состояний
Вложенной цепи Маркова:
pij =lim Qij (t ), i , j∈ E
фото
t →∞
∞
p01=∫ F̄ (u)dG(u)
0
∞
p02=∫ F (u)dG(u)
о
0
pi 0=1, pij =0, i , j= 1, 2
фото
Высшая школа экономики, Москва, 2018
12.
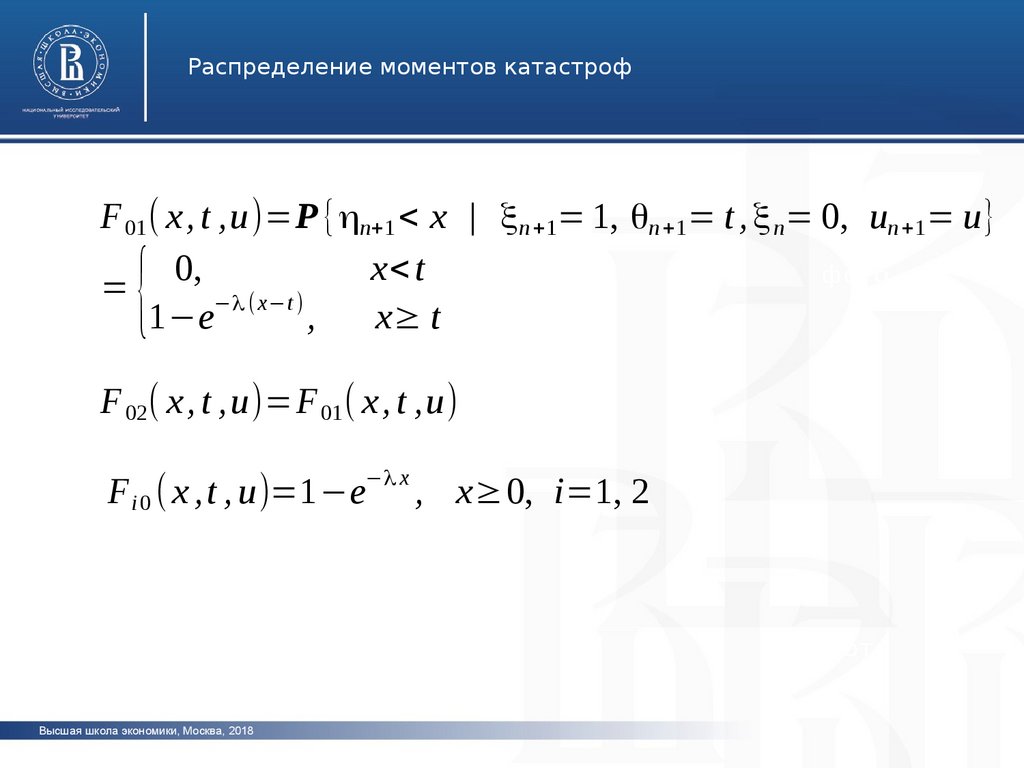
Распределение моментов катастрофF 01( x , t ,u)=P {ηn+1 < x | ξn +1= 1, θn +1= t , ξ n= 0, un +1= u}
0,
x< t
фото
=
1−e−λ (x−t ) ,
x≥ t
{
F 02( x , t ,u)=F 01( x , t ,u)
−λ x
Fi 0 (x ,t , u)=1−e
о
, x≥0, i=1, 2
фото
Высшая школа экономики, Москва, 2018
13.
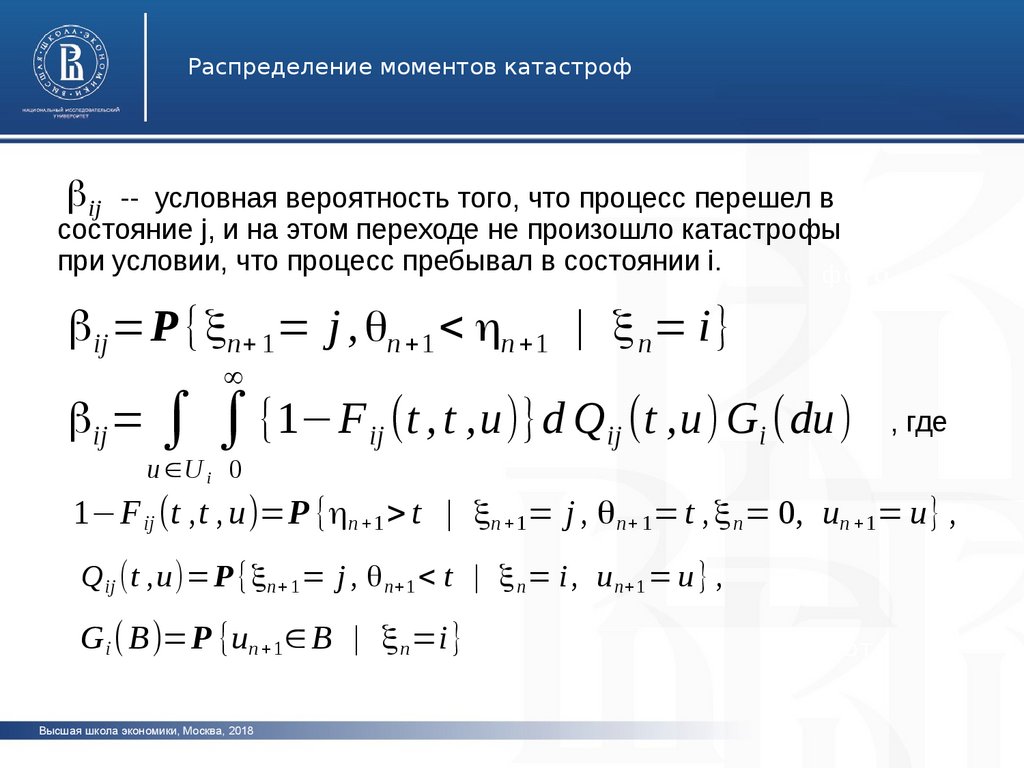
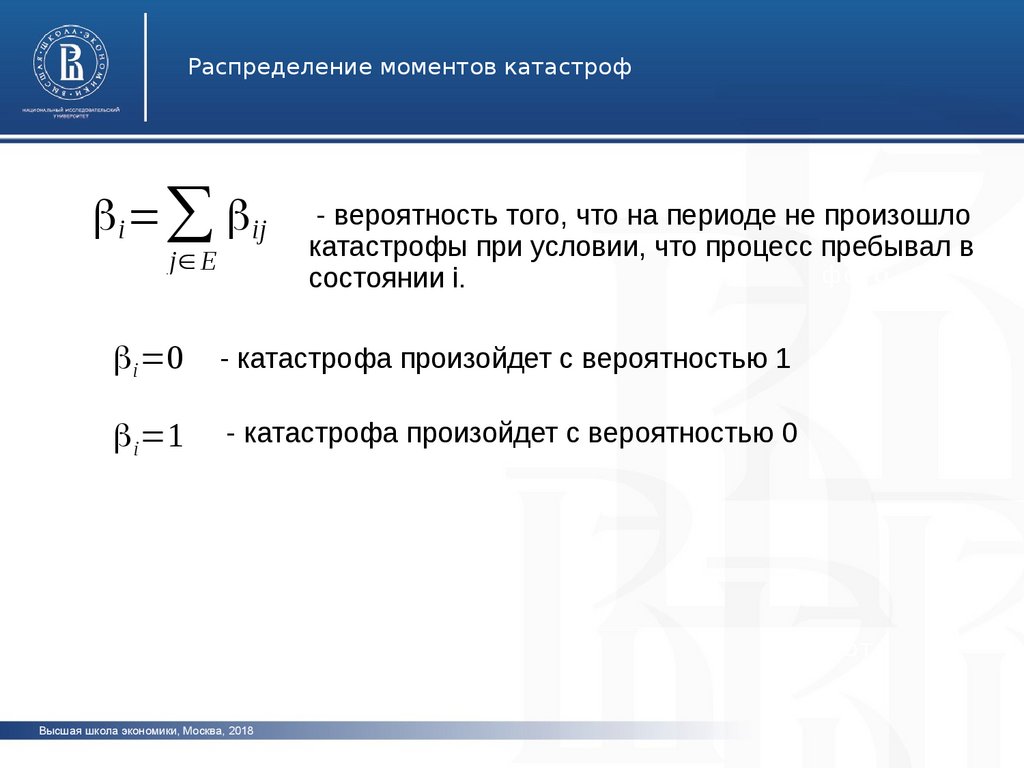
Распределение моментов катастрофβij
-- условная вероятность того, что процесс перешел в
состояние j, и на этом переходе не произошло катастрофы
при условии, что процесс пребывал в состоянии i.
фото
βij =P {ξn+ 1= j , θn +1 < ηn +1 | ξ n= i }
βij = ∫
∞
∫ {1−F ij (t , t ,u)}d Qij (t ,u) Gi (du)
u ∈U i 0
о
, где
1−F ij (t ,t , u)=P {ηn +1 > t | ξn +1= j , θ n+ 1= t , ξ n= 0, un +1= u} ,
Qij (t ,u)=P {ξn+ 1= j , θ n+1 < t | ξ n= i , u n+1 = u } ,
G i ( B)=P {un +1∈ B | ξ n=i}
Высшая школа экономики, Москва, 2018
фото
14.
Распределение моментов катастрофβi=∑ βij
j∈ E
- вероятность того, что на периоде не произошло
катастрофы при условии, что процесс пребывал в
фото
состоянии i.
βi=0
- катастрофа произойдет с вероятностью 1
βi=1
- катастрофа произойдет с вероятностью 0
βi=0
о
фото
Высшая школа экономики, Москва, 2018
15.
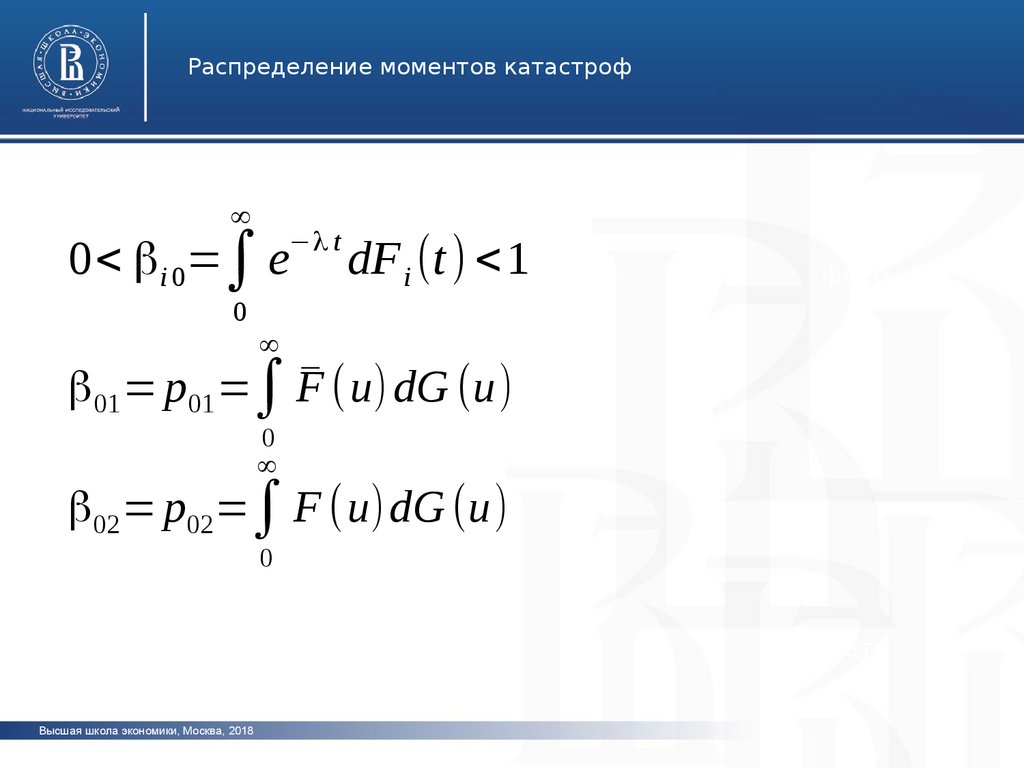
Распределение моментов катастроф∞
−λ t
0< βi 0=∫ e
dF i (t) < 1
фото
0
∞
β01= p01=∫ F̄ (u) dG (u)
0
∞
о
β02= p02=∫ F (u)dG (u)
0
фото
Высшая школа экономики, Москва, 2018
16.
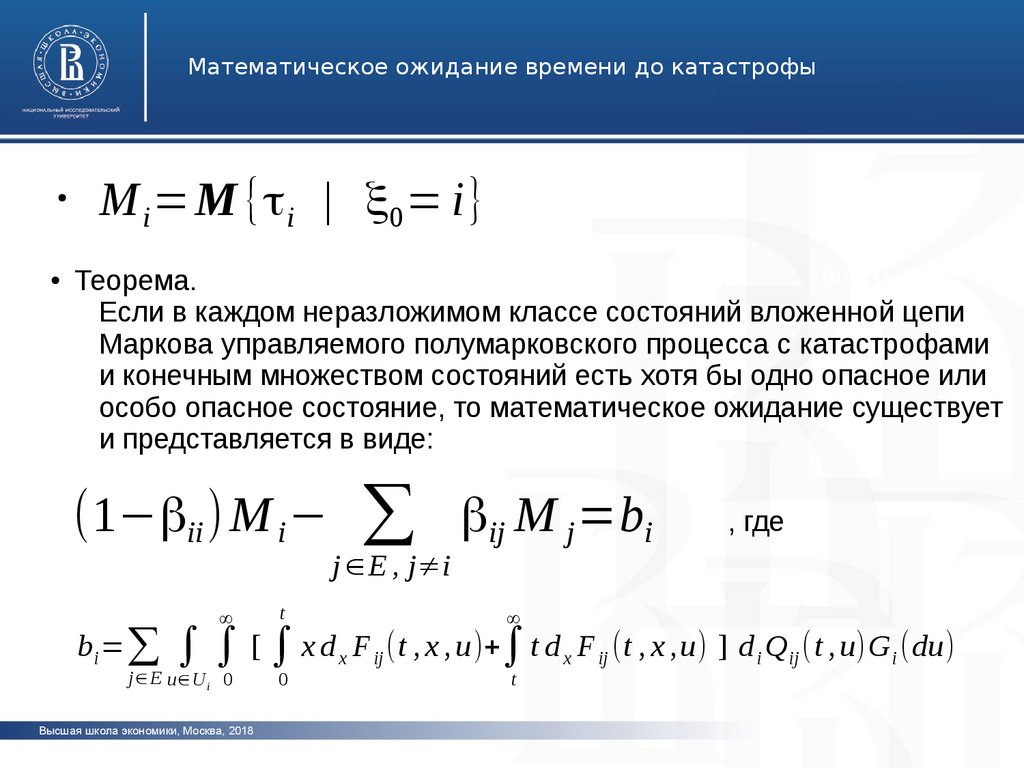
Математическое ожидание времени до катастрофыM i =M {τ i | ξ0 = i}
фото
Теорема.
Если в каждом неразложимом классе состояний вложенной цепи
Маркова управляемого полумарковского процесса с катастрофами
и конечным множеством состояний есть хотя бы одно опасное или
особо опасное состояние, то математическое ожидание существует
и представляется в виде:
о
(1−βii ) M i −
∑
βij M j =bi
, где
j ∈E , j≠i
∞
t
j∈E u∈U i 0
0
bi =∑
∞
, u)G i (du)
∫ ∫ [ ∫ x d x F ij (t , x , u)+∫ t d x F ij (t , x ,u) ] d i Qij (tфото
Высшая школа экономики, Москва, 2018
t
17.
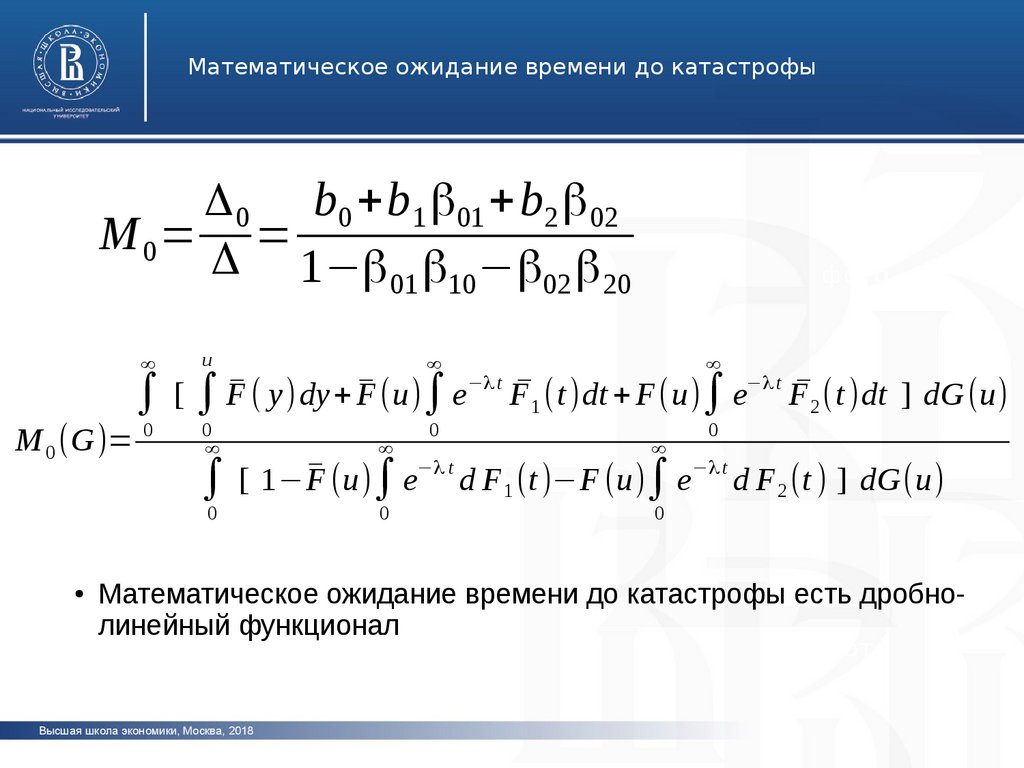
Математическое ожидание времени до катастрофыΔ 0 b0 +b 1 β01 +b2 β 02
M 0= =
Δ 1−β 01 β10−β02 β 20
∞
u
0
0
∞
∞
0
0
∞
∫ [ ∫ F̄ ( y) dy + F̄(u)∫ e
M 0 (G)=
0
−λ t
фото
∞
F̄ 1 (t)dt + F(u)∫ e−λ t F̄ 2 (t)dt ] dG (u)
∞о
0
∫ [ 1− F̄ (u)∫ e−λ t d F 1 (t)−F (u)∫ e−λ t d F 2 (t ) ] dG(u)
0
Математическое ожидание времени до катастрофы есть дробнолинейный функционал
фото
Высшая школа экономики, Москва, 2018
18.
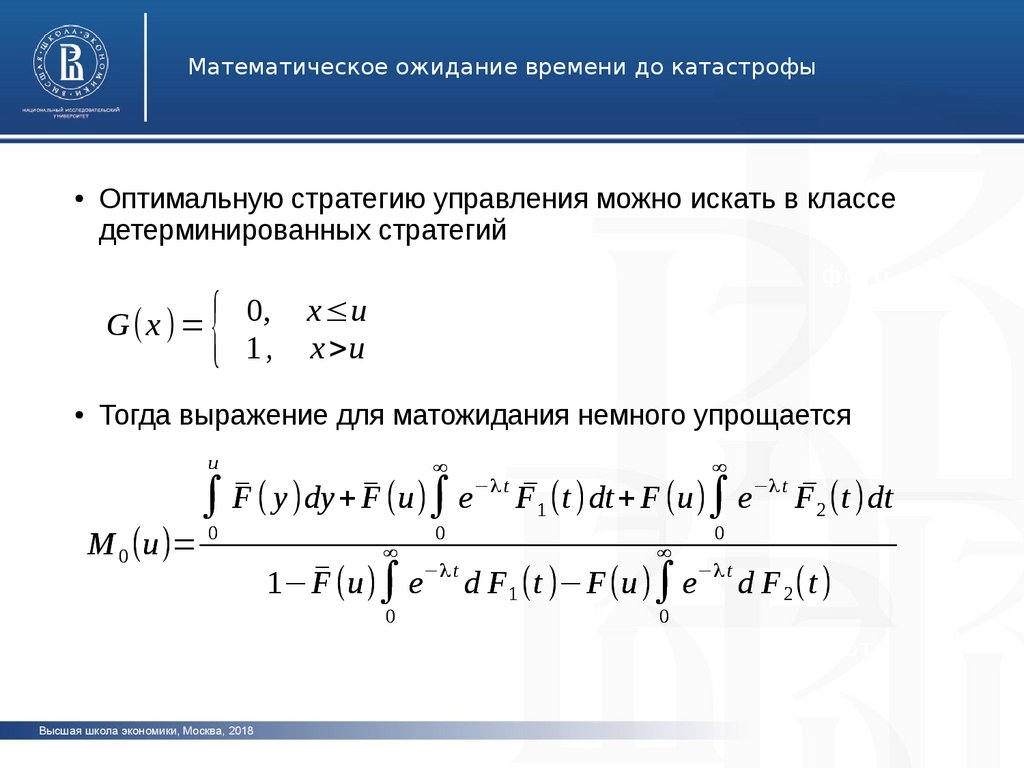
Математическое ожидание времени до катастрофыОптимальную стратегию управления можно искать в классе
детерминированных стратегий
фото
G(x ) =
{
0,
1,
x≤u
x >u
Тогда выражение для матожидания немного упрощается
u
∞
о
∫ F̄ ( y)dy+ F̄ (u)∫ e
M 0 (u)=
0
∞
1− F̄ (u)∫ e
0
0
−λ t
−λ t
∞
F̄ 1 (t) dt+ F (u)∫ e−λ t F̄ 2 (t) dt
∞
d F 1 (t )−F(u)∫ e
−λ t
0
−λ t
d F 2 (t)
0
фото
Высшая школа экономики, Москва, 2018
19.
Максимизация математического ожидания временидо катастрофы
Находим оптимальное управление
V 0 (u 0 )=max M 0 (u)
фото
u≥0
Вывод: нужно назначать проведение предупредительных
о
профилактик через u0 , тогда получим максимальное
математическое ожидание времени до катастрофы
фото
Высшая школа экономики, Москва, 2018
20.
Управление при неполной информацииРассмотрим две ситуации:
1) В результате статистических испытаний определяются
фотозначения
функций распределения F в отдельных точках.
W - множество распределений, которые в n заданных точках
принимают заданное значение.
Тогда можно считать, что F∈W
о
2) В результате статистически испытаний определяются
оценки матожидания.
W - множество распределений с фиксированным
математическим ожиданием.
Тогда можно считать, что F∈W
Высшая школа экономики, Москва, 2018
фото
21.
Постановка задачи при неполной информацииМатематическое ожидание времени до катастрофы зависит
еще и от распределения F
фото
Задача. Найти
max inf M 0 (F ,G)
G∈Ω F ∈W
о
А также распределения F 0, G 0 , на которых этот максимум
достигается
фото
Высшая школа экономики, Москва, 2018
22.
101000, Россия, Москва, Мясницкая ул., д. 20Тел.: (495) 621-7983, факс: (495) 628-7931
www.hse.ru