















 Программное обеспечение
Программное обеспечениеПохожие презентации:










ПО робоавтомобиля: алгоритмы распознавания и управления
1.
ПО робоавтомобиля: алгоритмыраспознавания и управления
ООО «ПопковРоботикс»
Пешкичев Роман
2017 год
2.
Структура презентацииЗадачи программного обеспечения
беспилотного транспорта
Алгоритмы
Вопросы-ответы
3.
Задачи ПО беспилотникаЛокализация на местности
4.
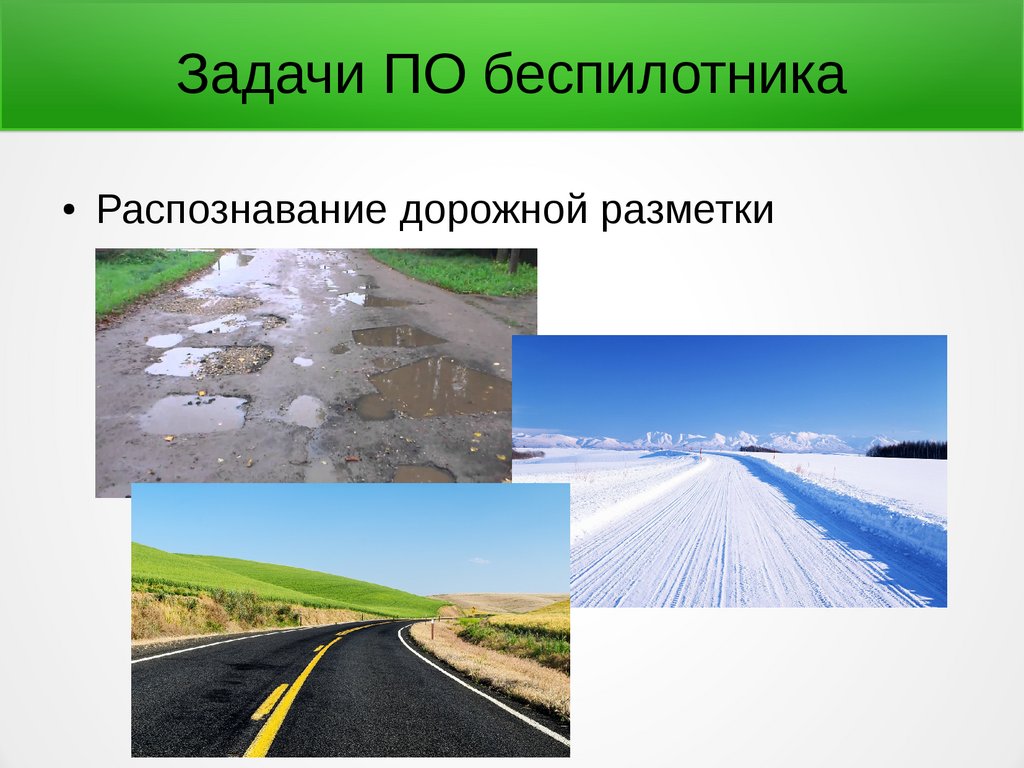
Задачи ПО беспилотникаРаспознавание дорожной разметки
5.
Задачи ПО беспилотникаРаспознавание знаков дорожного движения
и светофоров
6.
Задачи ПО беспилотникаРаспознавание автомобилей, пешеходов,
животных и любых других объектов на
дороге
7.
Задачи ПО беспилотникаПринятие решений (управление машиной)
8.
Цели создания моделиОбучение основам компьютерного зрения
Тестирование алгоритмов в модельных
условиях
9.
Задачи ПО модели беспилотникаРаспознавание упрощенной разметки
Распознавание знаков дорожного движения
и светофоров
Распознавание других моделей
беспилотников
Распознавание моделей пешеходов
Принятие решений (управление моделью)
10.
Распознавание объектовСтруктура алгоритмов
Получение изображений
Предварительная обработка
Сегментация
Классификация
11.
Предварительная обработкаУменьшение размерности
Перевод в другую цветовую модель
Коррекция/Нормализация
12.
СегментацияБинаризация
13.
СегментацияВыделение контуров
14.
СегментацияРазрастание регионов
15.
Классификация16.
КлассификацияСравнение с шаблоном
17.
КлассификацияСравнение (не)инвариантных характеристик
18.
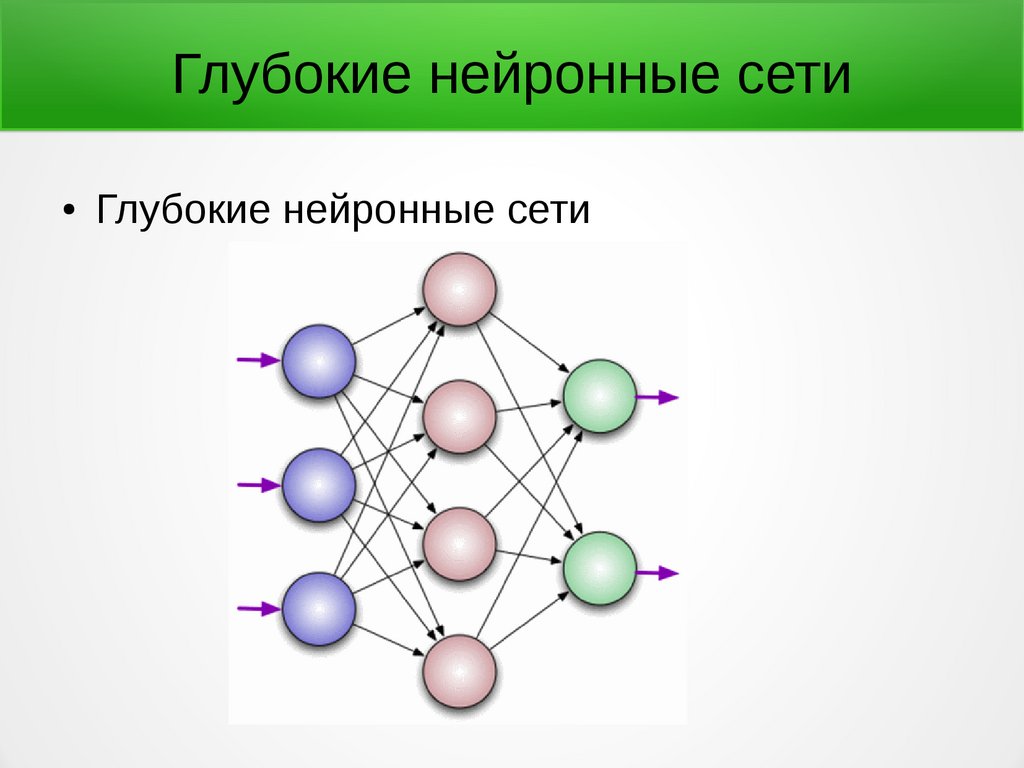
Глубокие нейронные сетиГлубокие нейронные сети