 Математика
МатематикаПохожие презентации:



")






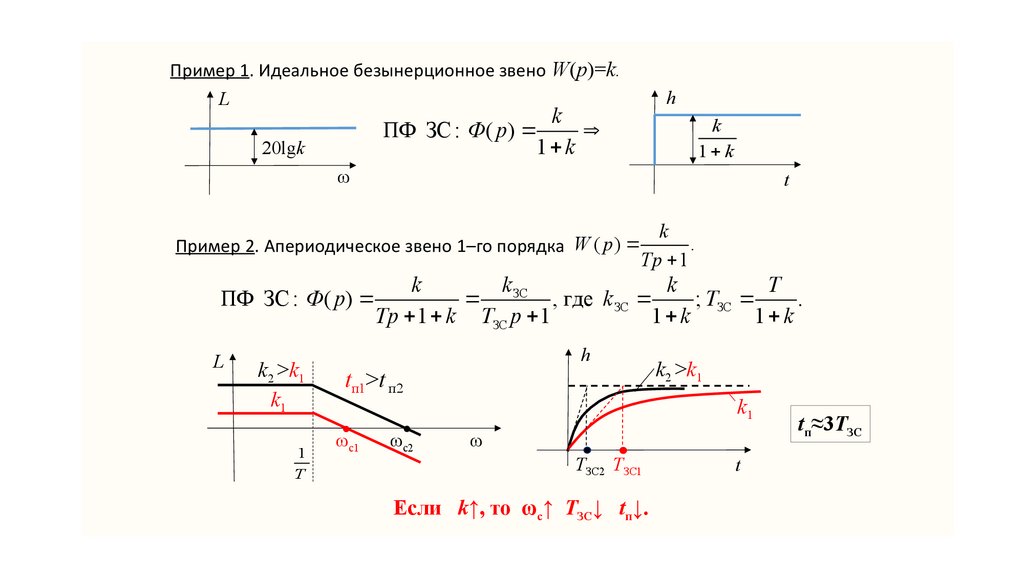
Проблема качества систем автоматического управления. Тема 4
1.
Проблема качества систем автоматического управленияВеличины, определяющие качество процессов в САУ, называются показателями
качества
(характеристиками
качества).
Они
являются
количественными
характеристиками.
Пример 1. Стоимость системы С. 2. Установившаяся ошибка системы еуст и т.д.
Диаграмма качества Вышнеградского И.А. (n=3).
Наиболее полно статические и динамические характеристики отражает ошибка
системы
e(t)=g(t)-y(t).
Для оценки качества:
1. На вход системы подают типовые воздействия.
2. Определяется не мгновенное значение ошибки, а проверяются некоторые условия,
которым должна удовлетворять САУ.
Эти условия называются критериями качества. Они являются качественными
характеристиками.
Пример 2. min C – КК. 2. еуст<eдоп и т.д..
2.
Основные критерии качестваКритерии точности. Определяют условия, которым должна
удовлетворять ошибка системы при некоторых типовых внешних
воздействиях;
Критерии запаса устойчивости. Определяют условия, которым
должен удовлетворять запас устойчивости;
Критерии быстродействия. Определяют ограничения на
длительность переходного процесса в системе;
Комплексные (интегральные) критерии. Дают обобщенную
оценку некоторых свойств системы.
3.
Показатели точностиОсновные подходы к оценке точности
Детерминистский
–
внешние
воздействия представляют собой
известные функции от времени.
Оценка точности производится по
величине еуст, возникающей при
подаче на САУ типовых внешних
воздействий.
Вероятностный
–
внешние
воздействия представляют собой
случайные (чаще стационарные)
процессы.
Оценка
точности
производится по вероятностным
характеристикам
ошибки
(например, по величине СКО).
Недостаток – система рассчитывается
на максимальные внешние
воздействия.
Т.о.
неоправданно
завышаются требования к системе, что
приводит к усложнению.
Недостаток
расчеты.
–
более
сложные
4.
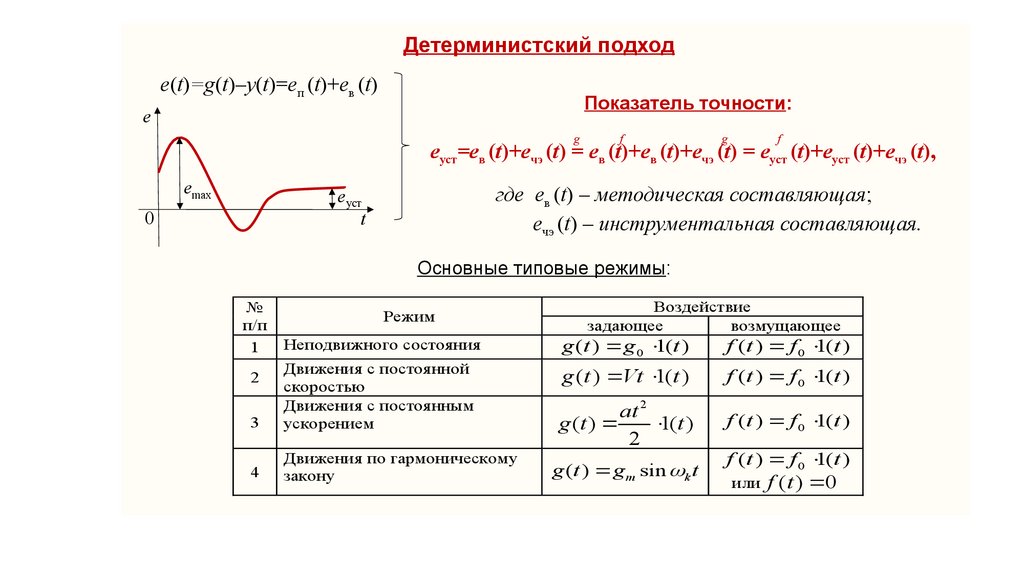
Детерминистский подходe(t)=g(t)–y(t)=eп (t)+eв (t)
Показатель точности:
е
g
f
g
f
еуст=eв (t)+eчэ (t) = eв (t)+eв (t)+eчэ (t) = eуст (t)+eуст (t)+eчэ (t),
еmax
где eв (t) – методическая составляющая;
eчэ (t) – инструментальная составляющая.
еуст
t
0
Основные типовые режимы:
№
п/п
1
Режим
Воздействие
задающее
возмущающее
Неподвижного состояния
g (t ) g 0 1(t )
f (t ) f 0 1(t )
g (t ) Vt 1(t )
f (t ) f 0 1(t )
3
Движения с постоянной
скоростью
Движения с постоянным
ускорением
at 2
g (t )
1(t )
2
f (t ) f 0 1(t )
4
Движения по гармоническому
закону
2
g (t ) g m sin k t
f (t ) f 0 1(t )
или
f (t ) 0
5.
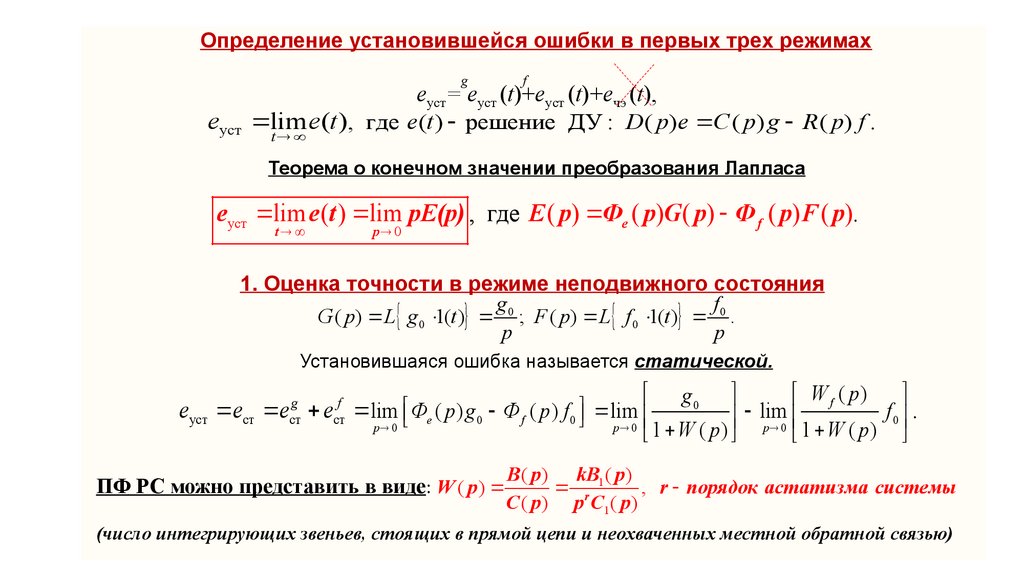
Определение установившейся ошибки в первых трех режимахg
f
еуст= eуст (t)+eуст (t)+eчэ (t),
eуст lim e(t ), где e(t ) решение ДУ : D( p)e C ( p) g R( p) f .
t
Теорема о конечном значении преобразования Лапласа
eуст lim e (t ) lim pE(p) , где E ( p) Фe ( p)G ( p) Ф f ( p) F ( p).
t
p 0
1. Оценка точности в режиме неподвижного состояния
g
f
G ( p ) L g 0 1(t ) 0 ; F ( p) L f 0 1(t ) 0 .
p
p
Установившаяся ошибка называется статической.
eуст
W f ( p)
g0
ест е е lim Фe ( p ) g 0 Ф f ( p ) f 0 lim
lim
f0 .
p 0
p 0 1 W ( p)
p 0 1 W ( p)
g
ст
f
ст
ПФ РС можно представить в виде: W ( p)
B ( p) kB1 ( p)
r
, r порядок астатизма системы
C ( p) p C1 ( p)
(число интегрирующих звеньев, стоящих в прямой цепи и неохваченных местной обратной связью)
6.
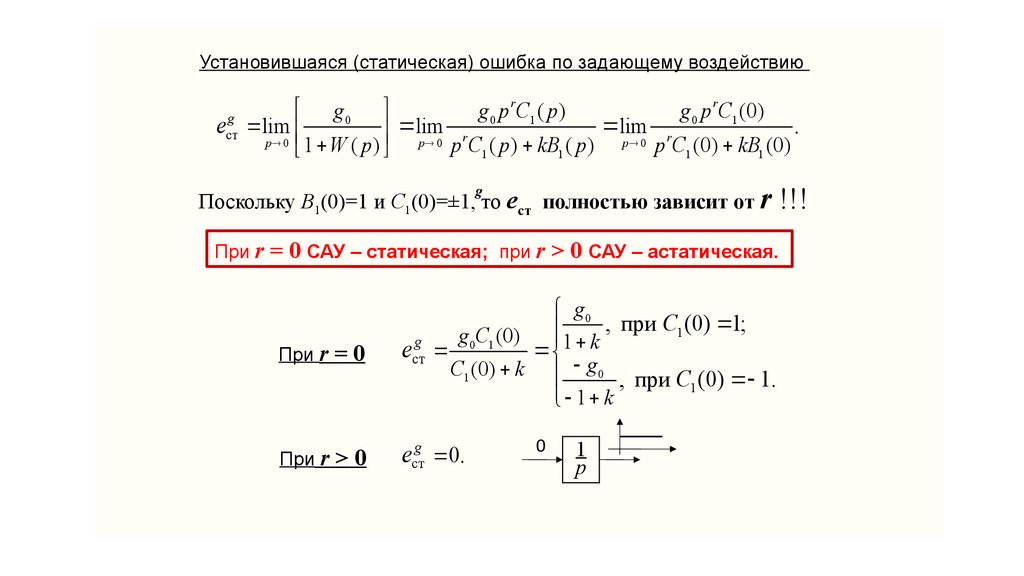
Установившаяся (статическая) ошибка по задающему воздействиюg 0 p r C1 ( p )
g 0 p r C1 (0)
g0
е lim
lim r
lim r
.
p 0 1 W ( p )
p 0 p C ( p ) kB ( p )
p 0 p C (0) kB (0)
1
1
1
1
g
ст
Поскольку В1(0)=1 и С1(0)=±1, то ест полностью зависит от r
g
При r
= 0 САУ – статическая; при r > 0 САУ – астатическая.
При r
При
=0
r>0
g0
, при C1 (0) 1;
g
C
(0)
естg 0 1
1 k
C1 (0) k g 0
, при C1 (0) 1.
1 k
естg 0.
0
1
р
!!!
7.
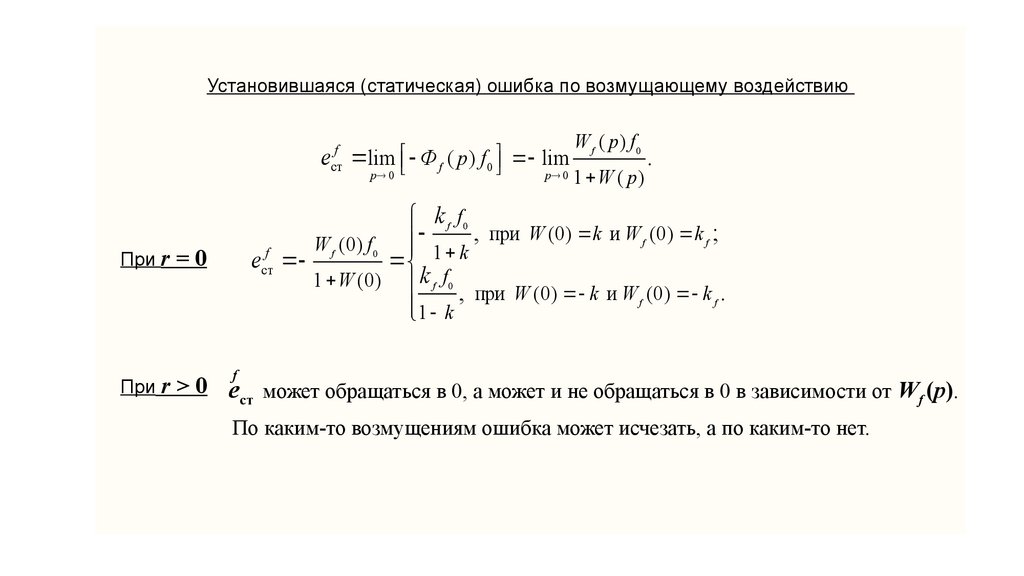
Установившаяся (статическая) ошибка по возмущающему воздействиюf
ст
е lim Ф f ( p ) f 0 lim
При r
При
p 0
p 0
Wf ( p) f0
1 W ( p)
.
k f f0
, при W (0) k и W f (0) k f ;
W
(0)
f
0
естf f
1 k
1 W (0) k f f 0
, при W (0) k и W f (0) k f .
1 k
=0
f
r > 0 ест может обращаться в 0, а может и не обращаться в 0 в зависимости от Wf (p).
По каким-то возмущениям ошибка может исчезать, а по каким-то нет.
8.
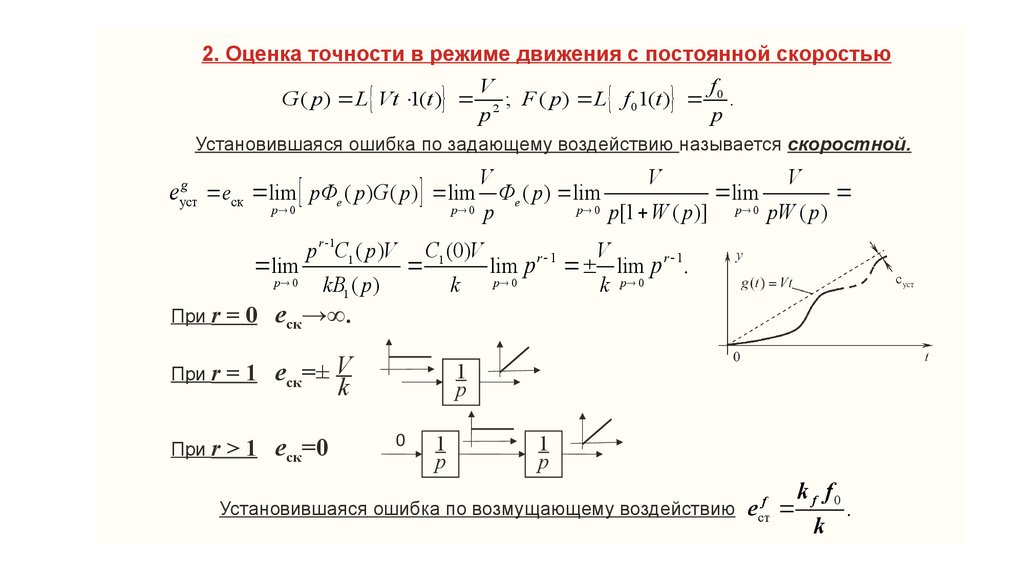
2. Оценка точности в режиме движения с постоянной скоростьюV
f
G ( p ) L Vt 1(t ) 2 ; F ( p ) L f 01(t ) 0 .
p
p
Установившаяся ошибка по задающему воздействию называется скоростной.
V
g
еуст
eск lim pФe ( p )G ( p ) lim Фe ( p) lim
p 0
lim
p 0
p 0
p r 1C1 ( p )V
kB1 ( p )
При r
= 0 ecк→∞.
При r
= 1 ecк=± V
При r
> 1 ecк=0
C1 (0)V
k
p
p 0
V
p[1 W ( p )]
lim
p 0
V
pW ( p )
V
lim p r 1 lim p r 1.
p 0
k p 0
1
р
k
0
1
р
1
р
Установившаяся ошибка по возмущающему воздействию e
f
ст
k f f0
k
.
9.
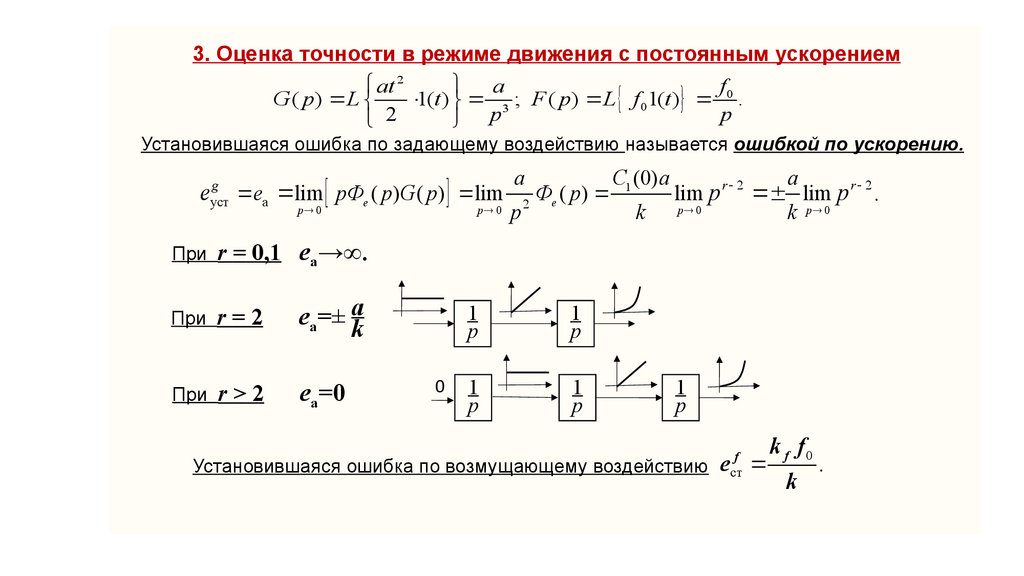
3. Оценка точности в режиме движения с постоянным ускорениемat 2
a
f
G ( p ) L
1(t ) 3 ; F ( p) L f 01(t ) 0 .
p
2
p
Установившаяся ошибка по задающему воздействию называется ошибкой по ускорению.
g
еуст
ea lim pФe ( p)G ( p) lim
p 0
При
r = 0,1 eа→∞.
При
r=2
eа=± а
k
При
r>2
eа=0
p 0
0
a
C1 (0) a
p
k
Фe ( p )
2
1
р
1
р
1
р
1
р
a
lim p r 2 lim p r 2 .
p 0
k p 0
1
р
Установившаяся ошибка по возмущающему воздействию e
f
ст
k f f0
k
.
10.
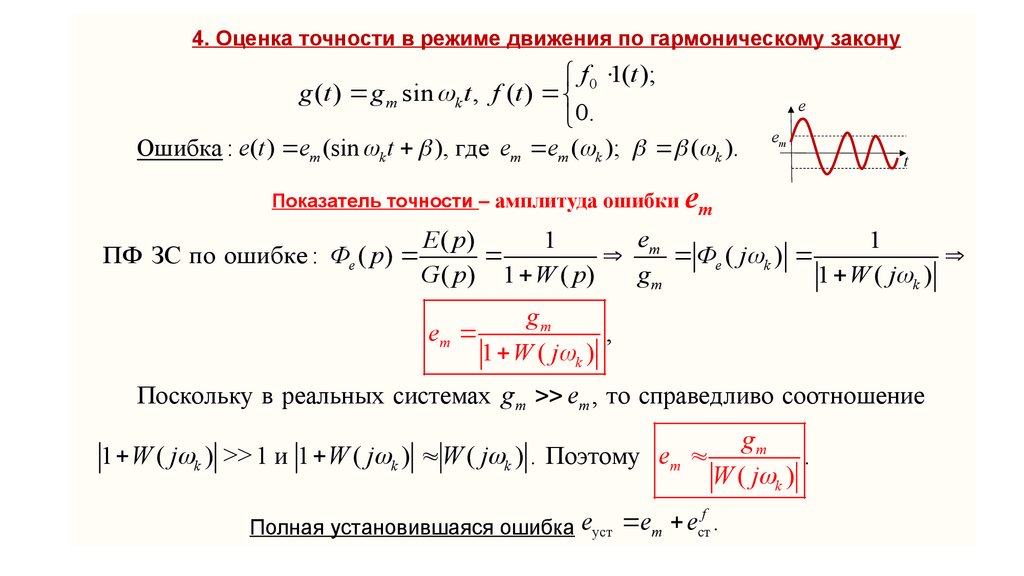
4. Оценка точности в режиме движения по гармоническому законуf 0 1(t );
g (t ) g m sin k t , f (t )
0.
Ошибка : e(t ) em (sin k t ), где em em ( k ); ( k ).
e
em
t
Показатель точности – амплитуда ошибки em
em
Е ( p)
1
1
ПФ ЗС по ошибке : Фе ( p)
Фe ( j k )
G ( p) 1 W ( p)
gm
1 W ( j k )
em
gm
,
1 W ( j k )
Поскольку в реальных системах g m em , то справедливо соотношение
gm
1 W ( j k ) >> 1 и 1 W ( j k ) W ( j k ) . Поэтому em
.
W ( j k )
f
e
е
e
Полная установившаяся ошибка уст
т
ст .
11.
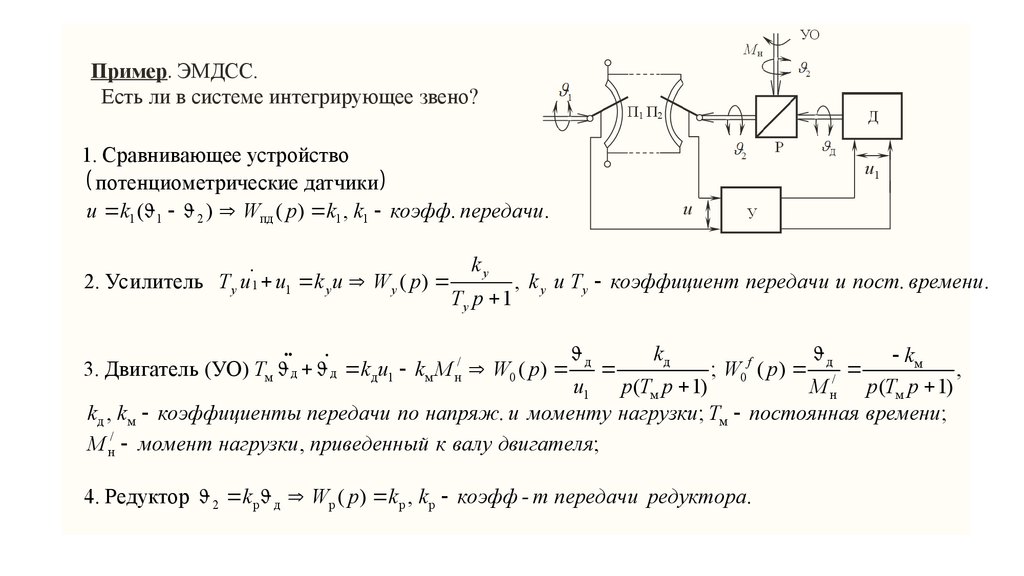
УОПример. ЭМДСС.
Есть ли в системе интегрирующее звено?
1. Сравнивающее устройство
потенциометрические датчики
u k1 ( 1 2 ) Wпд ( p ) k1 , k1 коэфф. передачи.
ky
2. Усилитель Ty u 1 u1 k y u Wy ( p )
Ty p 1
u1
u
, k y и Ty коэффициент передачи и пост. времени.
д
kд
д
kм
f
3. Двигатель (УО) Tм д
; W0 ( p ) /
,
д k д u1 kм М W0 ( p )
u1 р (Tм p 1)
М н р(Tм p 1)
kд , kм коэффициенты передачи по напряж. и моменту нагрузки; Tм постоянная времени;
М н/ момент нагрузки , приведенный к валу двигателя;
/
н
4. Редуктор 2 kр д Wр ( p) kр , kр коэфф - т передачи редуктора.
12.
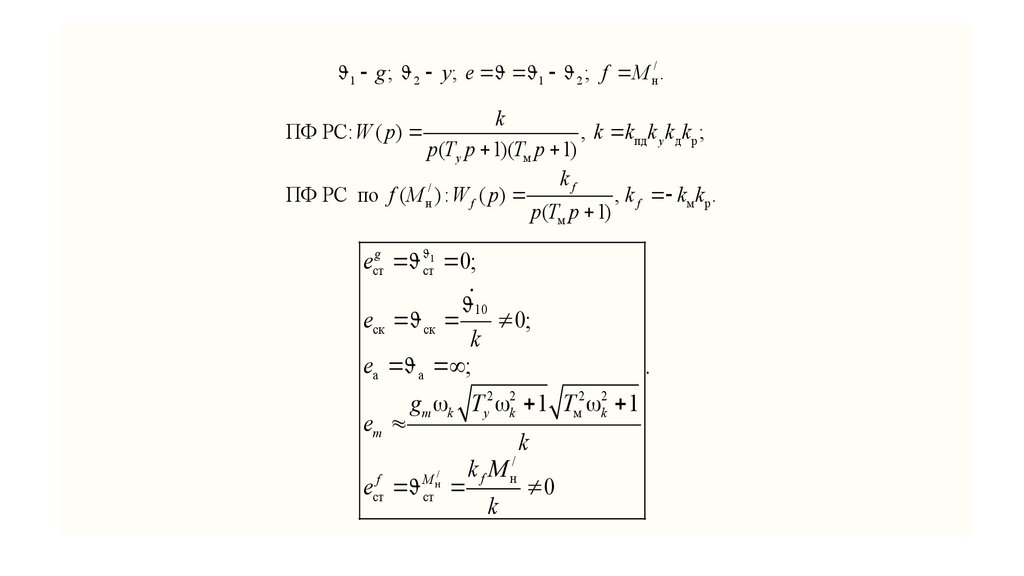
1 g ; 2 y; e 1 2 ; f М н/ .k
, k kпд k y kд kp ;
р(Ty p 1)(Tм p 1)
kf
/
ПФ РС по f ( М н ) : W f ( p)
, k f kм kp .
р (Tм p 1)
ПФ РС: W ( p)
eстg ст1 0;
10
0;
k
ea a ;
eск ск
em
g m k Ty2 k2 1 Tм2 k2 1
М н/
eстf ст
k f М н/
k
k
0
.
13.
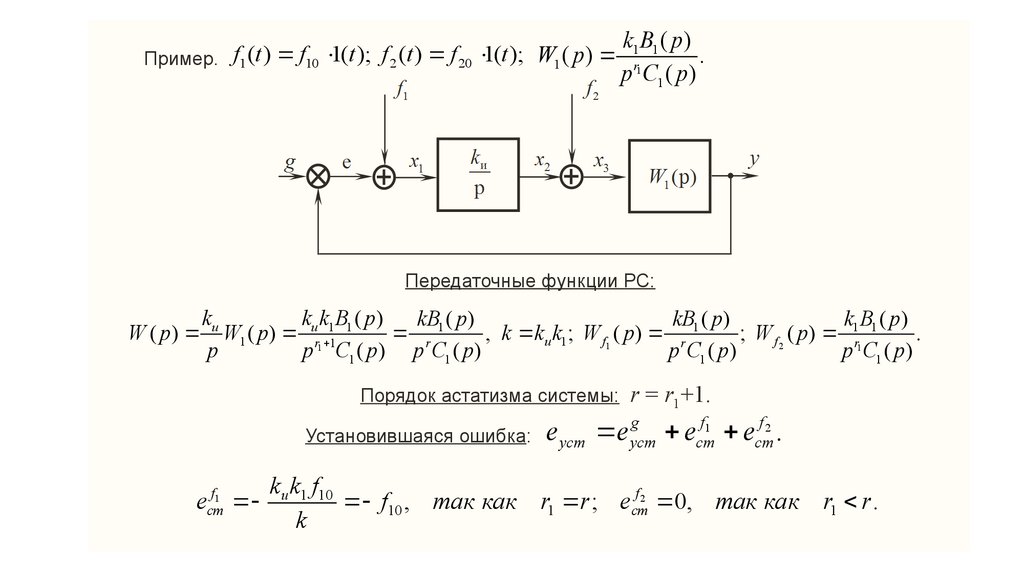
Пример. f1 (t ) f10 1(t ); f 2 (t ) f 20 1(t ); W1 ( p )k1 B1 ( p)
.
r1
p C1 ( p)
Передаточные функции РС:
W ( p)
kи
k k B ( p)
kB ( p)
kB ( p)
k B ( p)
W1 ( p) иr1 11 1
r1
, k kи k1 ; W f1 ( p) r 1
; W f 2 ( p) 1r1 1
.
p
p C1 ( p ) p C1 ( p)
p C1 ( p )
p C1 ( p )
Порядок астатизма системы:
Установившаяся ошибка:
kи k1 f10
e
f10 , так как
k
f1
ст
r = r1+1.
f1
g
eуст eуст
eст
eстf 2 .
r1 r ; eстf2 0, так как
r1 r .
14.
Оценка качества переходных процессовОшибка САУ:
e(t)=eп (t)+eв (t).
Рассматривается eп (t)!
Показатели качества переходных процессов (динамические характеристики)
1. Запас устойчивости ЗС (характеризует удаленность САУ от КГУ).
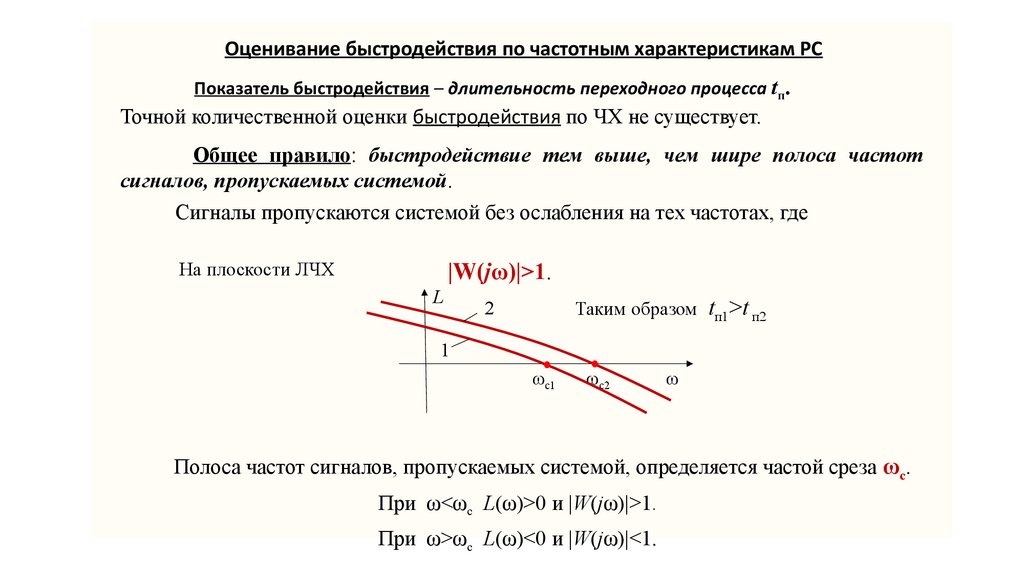
2. Быстродействие (характеризуется длительностью переходного процесса tп).
(теоретически tп→∞).
Основные пути оценивания качества переходных процессов
1. По переходной характеристике ЗС.
2. По частотным характеристикам РС.
3. По расположению корней ХУ ЗС.
4. По интегральным показателям.
15.
Оценка качества переходных процессов по переходнойПереходная характеристика?
Как по ней оценить
точность системы?
характеристике
ЗС
у
ууст
1
у
σ%=0%
ууст
2Δ
2
у
σ%≈7%
ууст
2Δ
3
2Δ
уmax
0
tп
t
0
tп
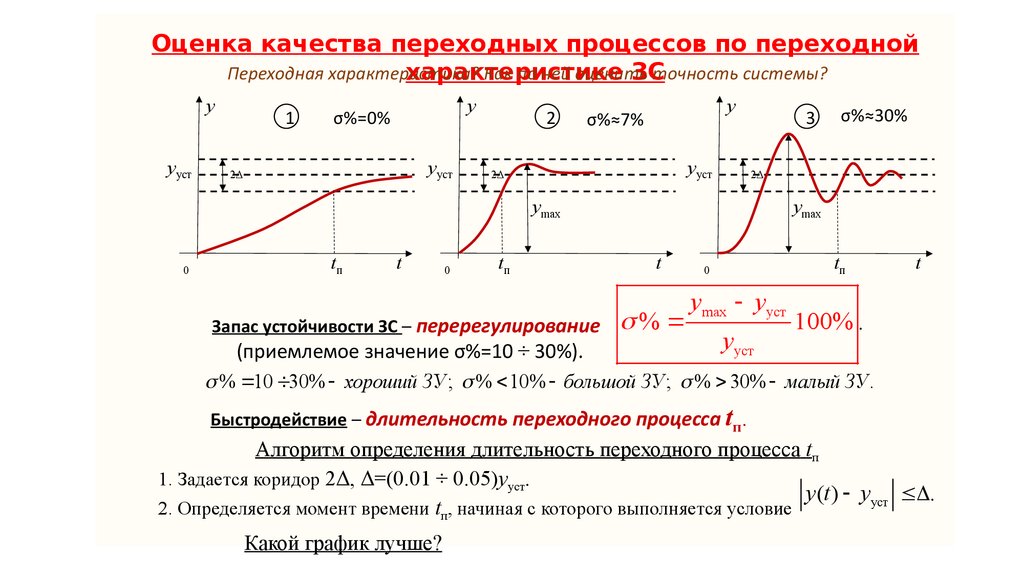
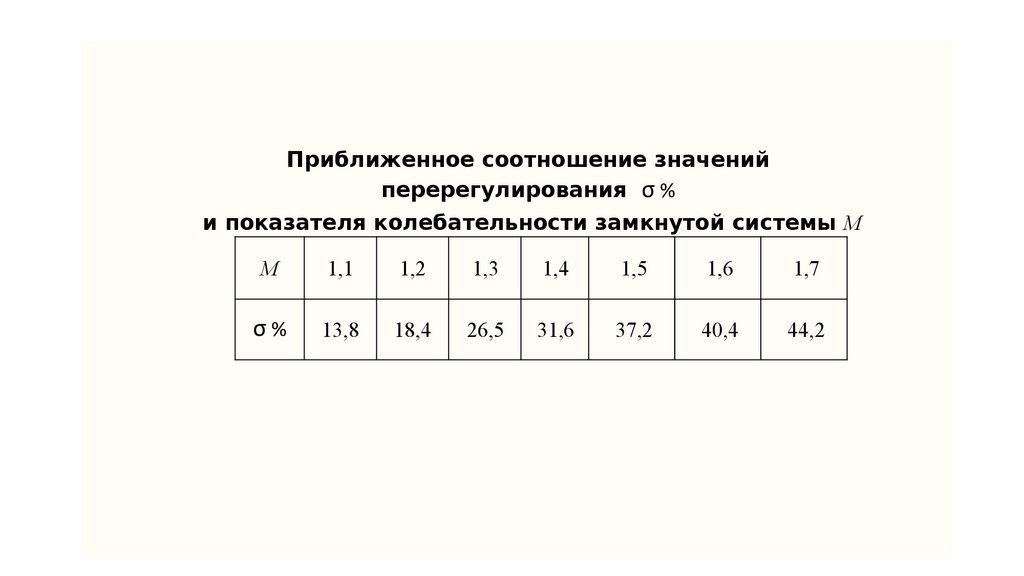
Запас устойчивости ЗС – перерегулирование
σ%≈30%
уmax
t
%
0
ymax yуст
tп
t
100% .
yуст
(приемлемое значение σ%=10 ÷ 30%).
% 10 30% хороший ЗУ ; % 10% большой ЗУ ; % 30% малый ЗУ .
Быстродействие – длительность переходного процесса tп.
Алгоритм определения длительность переходного процесса tп
1. Задается коридор 2Δ, Δ=(0.01 ÷ 0.05)ууст.
y (t ) yуст .
2. Определяется момент времени tп, начиная с которого выполняется условие
Какой график лучше?
16.
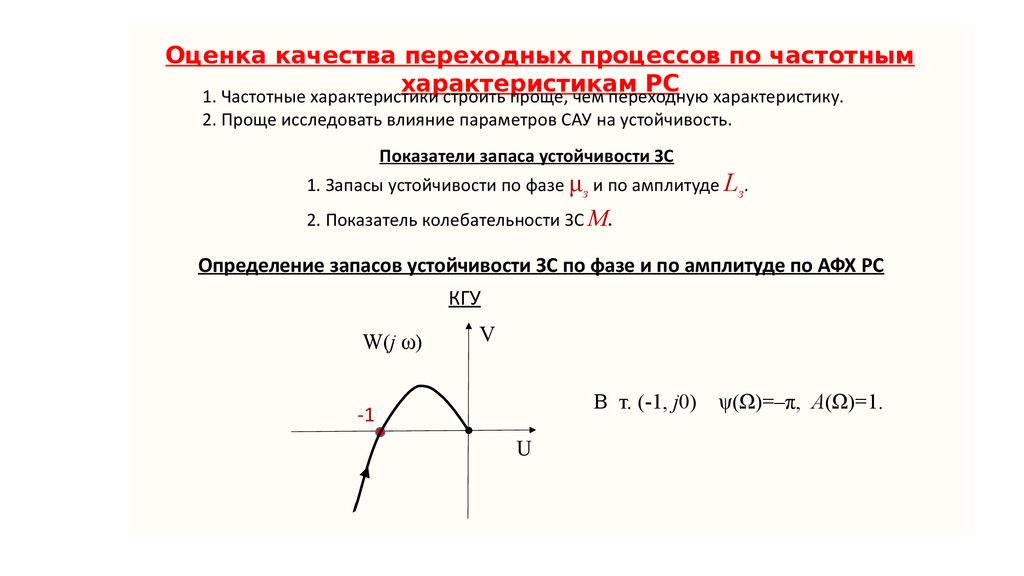
Оценка качества переходных процессов по частотнымхарактеристикам РС
1. Частотные характеристики строить проще, чем переходную характеристику.
2. Проще исследовать влияние параметров САУ на устойчивость.
Показатели запаса устойчивости ЗС
1. Запасы устойчивости по фазе μз и по амплитуде Lз.
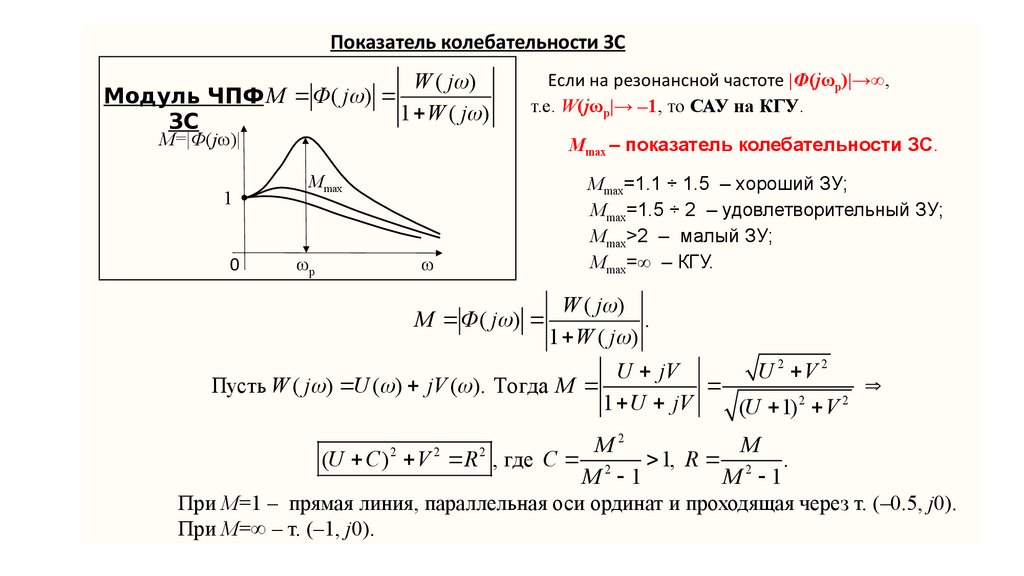
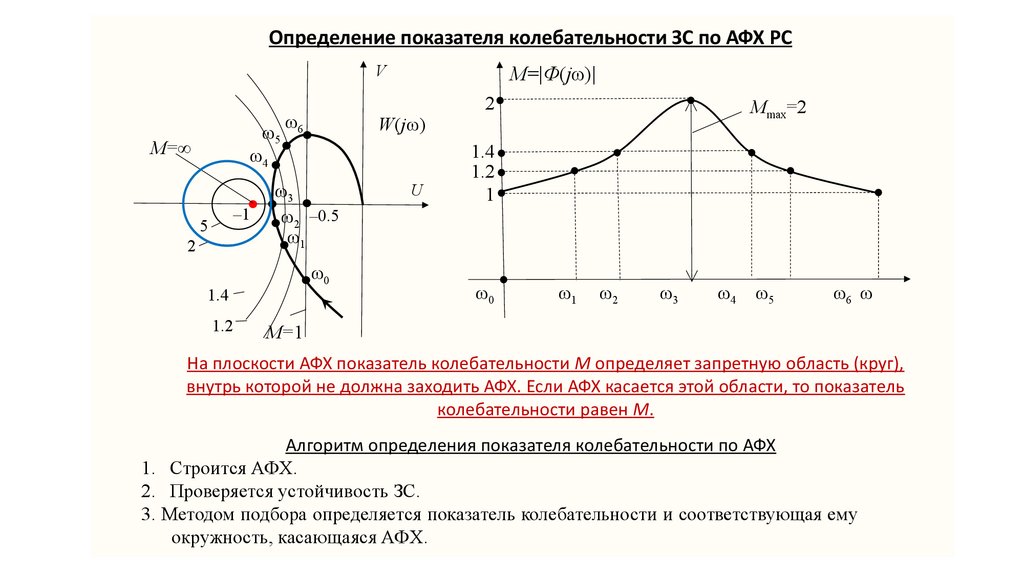
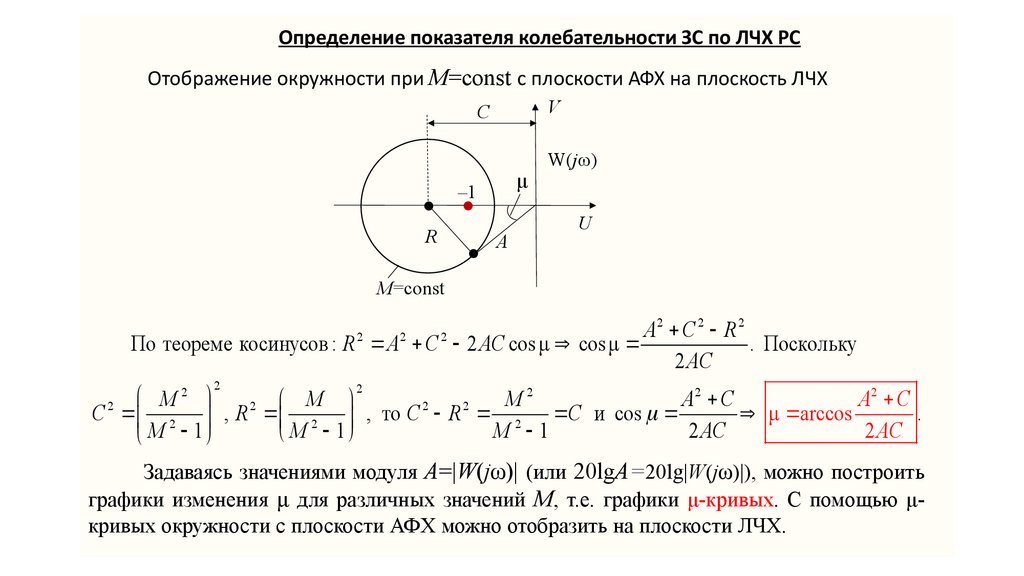
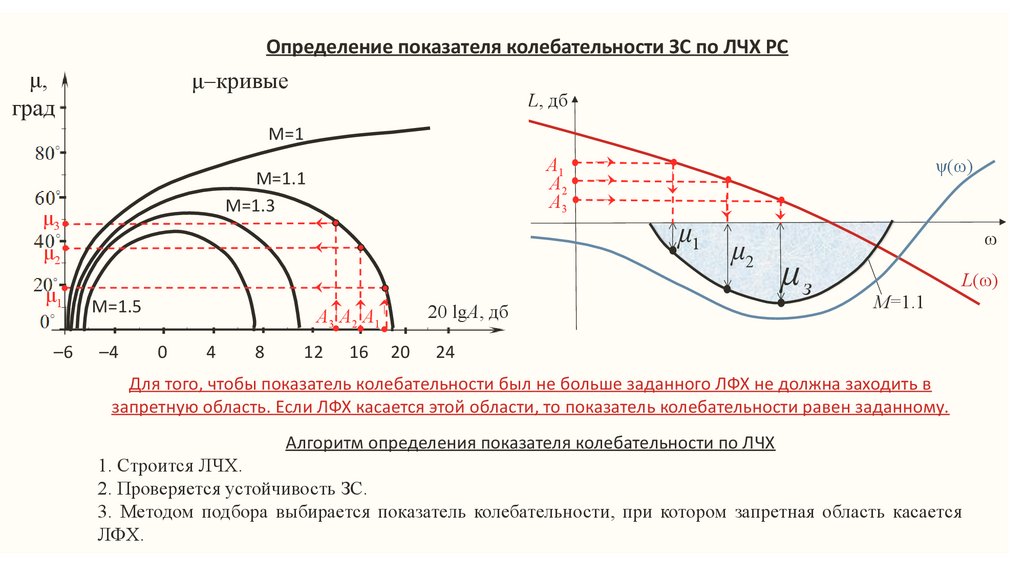
2. Показатель колебательности ЗС М.
Определение запасов устойчивости ЗС по фазе и по амплитуде по АФХ РС
КГУ
W(j ω)
V
В т. (-1, j0)
-1
U
ψ(Ω)=–π, А(Ω)=1.
17.
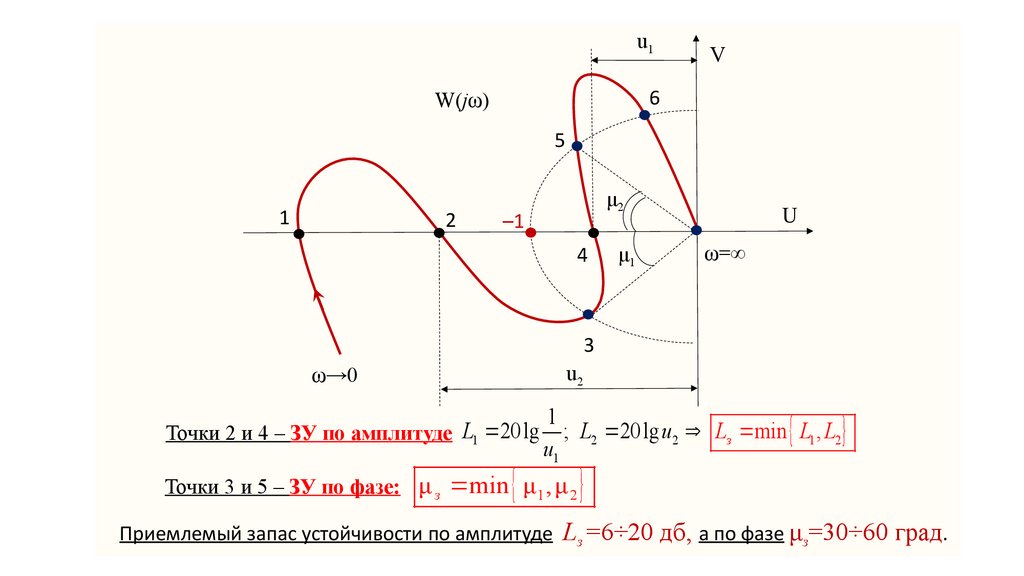
u1W(jω)
V
6
5
1
2
μ2
–1
4
μ1
U
ω=∞
3
ω→0
Точки 2 и 4 – ЗУ по амплитуде L1 20lg
u2
1
; L2 20lg u2 Lз min L1 , L2
u1
Точки 3 и 5 – ЗУ по фазе: μ з min μ1 ,μ 2
Приемлемый запас устойчивости по амплитуде Lз =6÷20 дб, а по фазе μз=30÷60 град.
18.
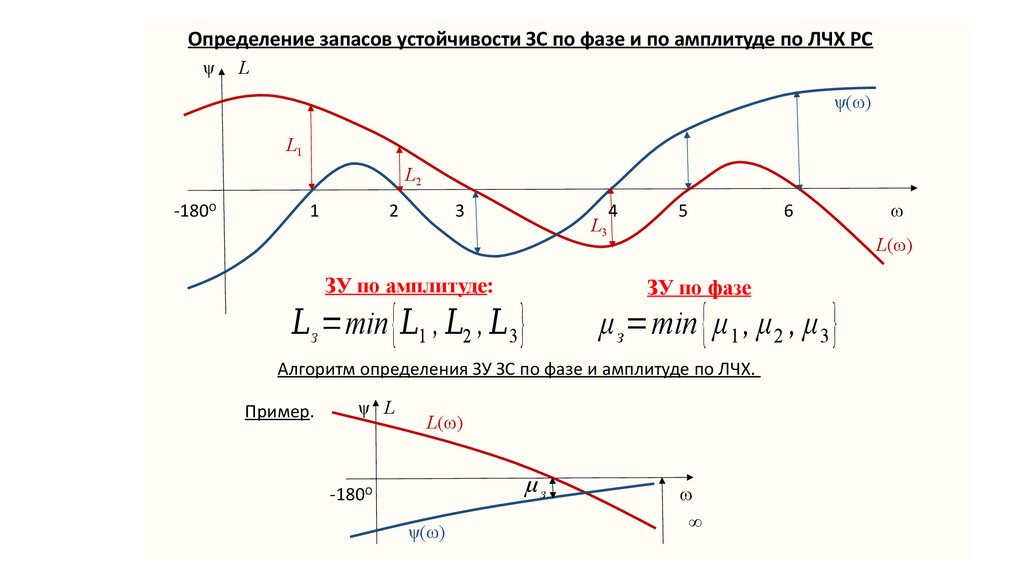
Определение запасов устойчивости ЗС по фазе и по амплитуде по ЛЧХ РСψ
L
ψ(ω)
L1
L2
-180О
1
2
3
L3
ЗУ по амплитуде:
4
5
μ з=min { μ 1 , μ 2 , μ 3 }
Алгоритм определения ЗУ ЗС по фазе и амплитуде по ЛЧХ.
ψ L
L(ω)
μз
-180О
ψ(ω)
ω
L(ω)
ЗУ по фазе