")















")






.")
 Математика
Математика Физика
ФизикаПохожие презентации:
")
 = поступательное + вращательное")



")


")
 движение точки")
Плоскопараллельное движение твердого тела (плоское)
1. Плоскопараллельное движение твердого тела (плоское)
Плоскопараллельным (плоским) движением твердоготела называется такое движение, при котором все точки
тела движутся в плоскостях, параллельных одной
неподвижной плоскости, которая называется основной
плоскостью
.
2. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ
zРассмотрим произвольное сечение.
Произвольные точки сечения А и B
спроецируем на основную плоскость.
A
B
Прямые АА1, ВВ1,
параллельны , следовательно
движение этих прямых
поступательное
C
D
y
x
В1
А1
Основная плоскость
Вывод: Для исследования
плоскопараллельного движения
тела достаточно изучить
движение одной плоскости
этого тела параллельной
основной.
3. Уравнения плоскопараллельного движения
Точка А - полюсy
B
yА
o
x A f1 (t )
φ
y A f 2 (t )
A
f 3 (t )
xА
x
4.
Пример плоскопараллельного движения твердоготела
5. Разложение плоскопараллельного движения на простейшие виды движения
Плоскопараллельное движение можно разложить на поступательноедвижение вместе с полюсом и вращательное вокруг оси,
проходящей через полюс.
Было АВ
Стало А1В1
y
А
z
k
Угол φ не зависит
от выбора полюса
В
А2
В1
φ
А1
x
w &k
φ
В2
&k
e w& &
6. Геометрическая интерпретация теоремы
Теорема о скоростях точек тела при плоскопараллельномдвижении
Геометрическая
Скорость произвольной точки
интерпретация теоремы
плоской фигуры равна
геометрической сумме скорости
полюса и вращательной
скорости этой точки вокруг
VBA
В
оси, проходящей через полюс .
VB
VA
VB VA VBA
VBA AB
ω
VA
А
7. Теорема о проекциях скоростей двух точек тела на прямую, соединяющую эти точки
Проекции скоростей двух точек тела на прямую,соединяющую эти точки, равны.
VB VA VBA
пр ABVA пр ABVB
VBA AB
A
VA
VA
α
B
β
V Ax
VA cosα = VB cosβ
VBA
x
α
VB
VBx
8.
VAМгновенный центр
скоростей
B
A
VB
P
Выберем точку P за полюс
Мгновенным центром скоростей
(МЦС) называется точка связанная
с телом, скорость которой в
данный момент времени равна
нулю.
Точка P – мгновенный центр
скоростей. VP=0
VA VP VAP
VAP AP
VB VP VBP
VBP BP
Точка P находится на пересечении перпендикуляров,
восстановленных к скоростям в точках «А» и «В»
9.
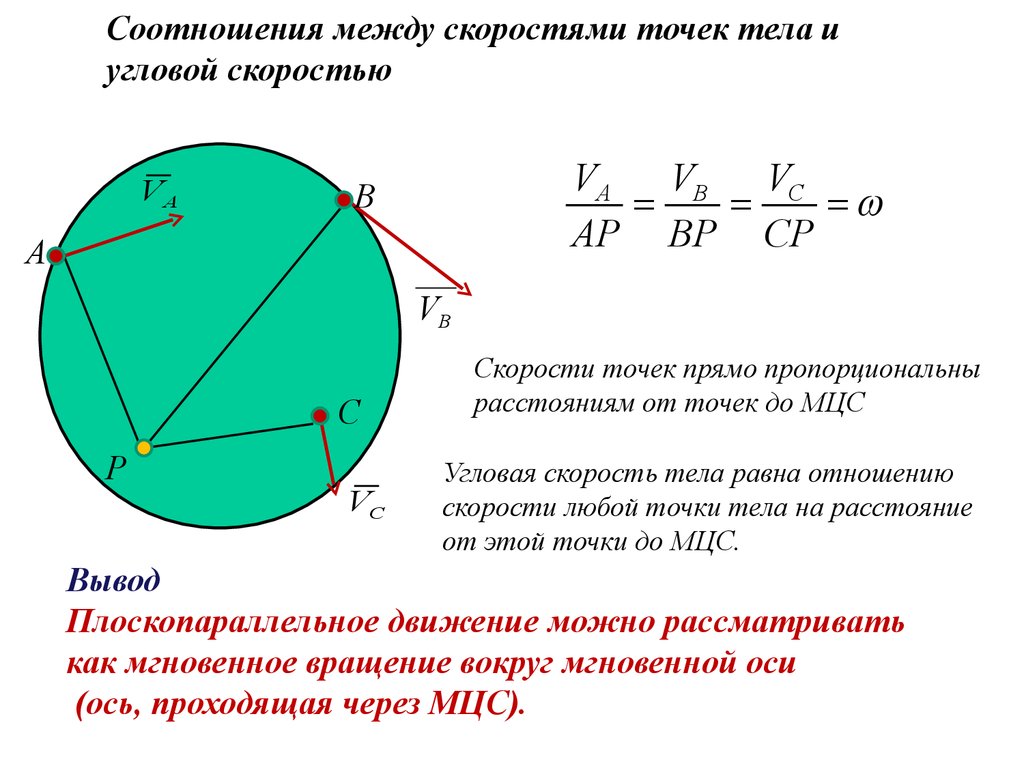
Соотношения между скоростями точек тела иугловой скоростью
VA
VA VB VC
w
AP BP CP
B
A
VB
С
P
VС
Скорости точек прямо пропорциональны
расстояниям от точек до МЦС
Угловая скорость тела равна отношению
скорости любой точки тела на расстояние
от этой точки до МЦС.
Вывод
Плоскопараллельное движение можно рассматривать
как мгновенное вращение вокруг мгновенной оси
(ось, проходящая через МЦС).
10. Скорости двух точек тела параллельны друг другу, не равны между собой и перпендикулярны прямой соединяющей эти точки.
VAА
VA
А
Р
В
VB
VB
Р
В
11. Скорости двух точек параллельны, но не перпендикулярны прямой, соединяющей эти точки.
VAА
w
VA
AP
0
Движение тела поступательное
В
VB
МЦС в бесконечности
VA VB
12. 4. Тело катится без скольжения по неподвижной поверхности.
VAА
VС
С
ω
P МЦС
Vp 0
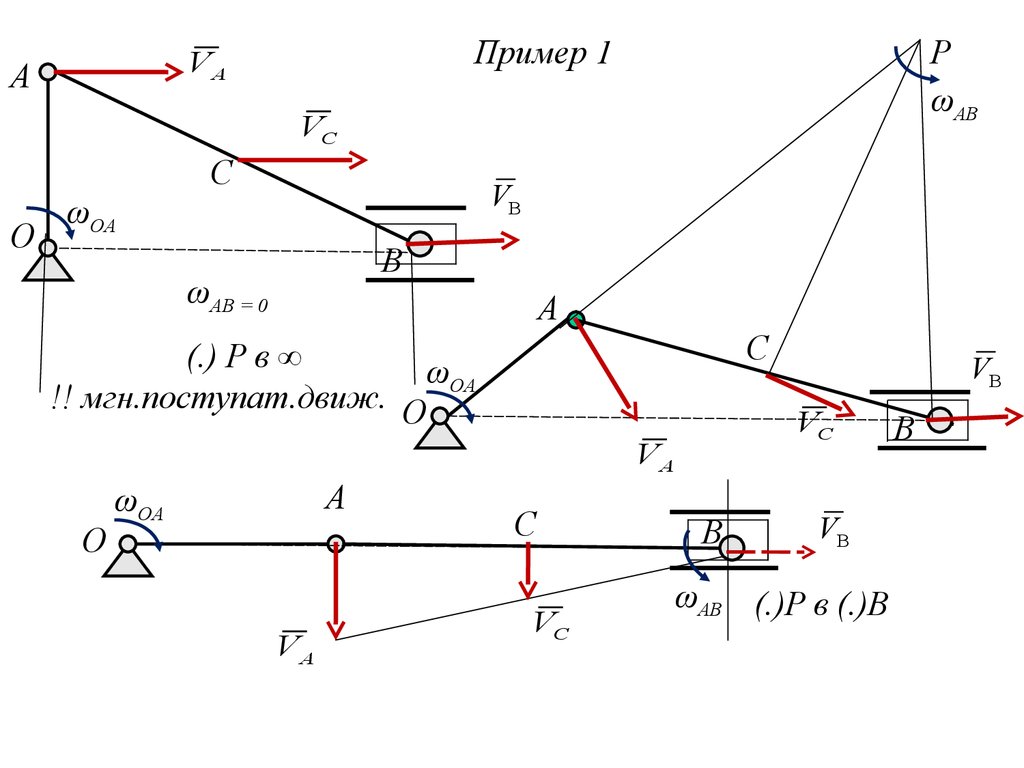
13.
Пример 1VA
A
P
ωAB
VС
C
O
VB
ωOA
B
ωAB = 0
A
C
(.) P в ∞
ωOA
!! мгн.поступат.движ. O
VС
VA
O
A
ωOA
VA
C
VС
VB
B
VB
ωAB (.)P в (.)В
B
14. Постановка задачи: Найти для заданного положения механизма скорости, указанных точек, угловые скорости всех звеньев и ускорения двух точе
Постановка задачи:Найти для заданного положения механизма скорости, указанных точек,
угловые скорости всех звеньев и ускорения двух точек.
с
Дано : wОА 3с 1 ; e ОА 4с 2 ; ОА 4см; АВ 4см; r 2см
ВВ
D
Определить : V A ;VB ;VC ;VD ; a A ; aB ; aC ; aD
1.Определение скоростей
1.1 С помощью мгновенного центра скоростей.
A
1.2 С помощью плана скоростей.
600
2.Определение ускорений
600
e ОА
wОА
O
2.1 С помощью теоремы ускорений.
15. Для заданного положения механизма определить скорости всех указанных точек и угловые скорости всех звеньев.
СVС Определить : VA ;VB ;VC ;VD ; w AB ; wд
PAB w AB
60
Дано : wОА 3с 1 ; e OA 4с 2 ; ОА 4см; АВ 4см; r 2см
Рд
0
wд
В
VB
A
VA
600
600
D
Решение:
1. Построить механизм в масштабе!!!
2.Анализ движения звеньев системы.
VD
Стержень OA вращательное
движение VA OA
Точка В движется по прямой
направляющей диска
e ОА
wОА
O
Стержень АВ плоскопара ллельное
движение. Точка РАВ МЦС
Диск плоскопара ллельное
движение. Точка Рд МЦС
VB Рд B ; VC РдC ; VD Рд D
16. 3.Определение скоростей с помощью мгновенного центра скоростей
VA wOA OA 3 4 12см / сС
PAB w AB
600
ВВ
Рд
wд
VС
VB
В
D
VD
Стержень АВ плоскопараллельное
движение. Точка РАВ МЦС
w АВ
VA
APAB
w АВ
VA
APAB
124 3c 1 ;
VB
BPAB
VB w АВ BPAB 3 4 12см / с
A
VA
Диск плоскопара ллельное
600
600
движение. Точка Р АВ МЦС
e ОА
wОА
O
wд
VB
BPд
VС
CPд
wд VrB V2Dr
VD
DPд
VB
1
;
w
6
с
д
r
2
VC
r
VC wд СPд 6 2 2 17см / с
VD wд DPд 6 4 24см / с
17. 4.Построение плана скоростей Графическое изображение векторов скоростей точек плоской фигуры
.4 Построение плана скоростей
Графическое изображение векторов скоростей точек плоской фигуры
V A OA; V A 12см / с
VСD
С
VСB
ВВ
О1
VB
VA
оa
D
o
VBA
60
600
VB
VD
О1 B
О1 D
ob
od
r
2r
0,5
VD 2VB 24см / с
e ОА
O
VC oc V 8,5 2 17см / с
6см
VB ob V 6 2 12см / с
b
wОА
VB V A VBA ; VBA AB
a
0
A
v 2 1c масштабный коэффициен т скорости
VA
12
2
c
VC VB VCB ; VCB CB
d
VC VD VCD ; VCD CD
18. Свойства плана скоростей
1. Одноименные отрезки плана скоростей и механизмавзаимно перпендикулярны.
2. Одноименные отрезки плана скоростей и механизма
прямо пропорциональны.
3. Одноименные фигуры плана скоростей и механизма подобны
и повернуты друг относительно друга на угол 900
19. Правило оформления ИДЗ К.
Титульный лист.«Кинематический анализ плоского механизма.»
1. Формат отчета: А4
2. Лист 1. Схема механизма. Постановка задачи. Дано.
3. Лист 2. Схема механизма в масштабе.
Аналитическое определение скоростей (МЦС) и ускорений.
4. Лист 3. Схема механизма в масштабе.
Графическое определение скоростей (план скоростей).
20. Защита задания Найти скорость точки К (двумя способами)
СPAB w AB
60
0
VК
A
VA
ВВ
Рд
wд
VС
VB
o
D
VD
a
К
k
b
600
600
e ОА
wОА
O
d
c
21. Теорема о сложении ускорений точек при плоскопараллельном движении тела
Вa ц BA
900
a вр BA
Ускорение произвольной точки тела
при его плоскопараллельном движении равно
векторной сумме ускорения полюса,
вращательного и центростремительного
ускорений этой точки при вращении вокруг
полюса.
aB a A a a
вр
BA
A
w
ц
ВА
вр
вр
aВА
ε AB; aВА
АВ
ц
a ВА
ω 2 AB;
aA
ц
a ВА
направлено по АВ от( ) В к ( ) А
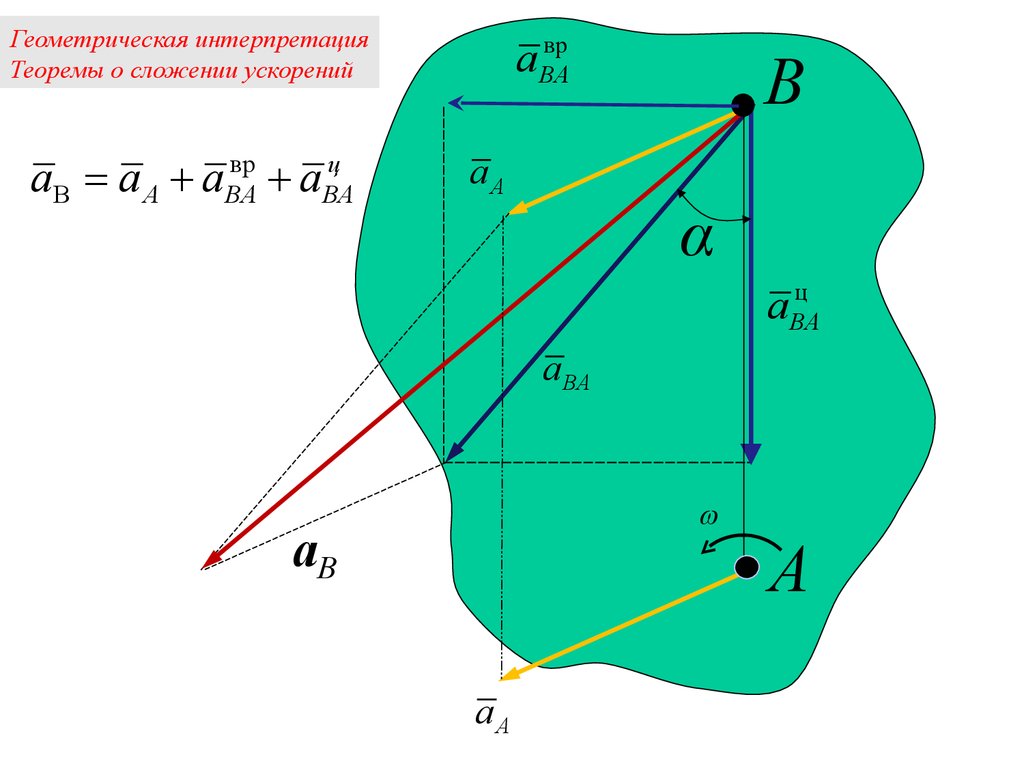
22.
Геометрическая интерпретацияТеоремы о сложении ускорений
вр
ц
aB a A aBA
aВА
вр
a BA
aA
B
α
a
ц
BA
aBA
w
aB
A
aA
23. Постановка задачи: Найти для заданного положения механизма ускорения всех указанных точек и угловые ускорения всех звеньев.
:Постановка задачи Найти для заданного положения механизма
ускорения всех указанных точек и угловые ускорения всех звеньев.
С
Дано : wОА 3с 1 ; e ОА 4с 2 ; ОА 4см; АВ 4см; r 2см
ВВ
P
Определить : a A ; a B ; aC ; aD ; e АВ ; e д
D
2.Определение ускорений
2.1 С помощью теоремы ускорений.
A
600
2.2 С помощью плана ускорений.
600
e ОА
wОА
O
24. Аналитическое определение ускорений.
Cn
aA aA aA
B
aBA
a A w 2 OA OA 9 4 36см / с 2
D
вр
a A e OA OA 4 4 16см / с 2
y
a A 36 2 16 2 39,4см / с 2
aB
600
A
a
A
x
n
(*)
2
Проведем оси координат и спроецируем (*) на эти оси
e OA
O
a B a A a ц BA a вр BA
a ц BA w AB AB 9 4 36см / с 2
600
aA
wOA
ОА 4см; АВ 4см; r 2см
wд 6с 1
w АВ 3c 1 ;
n
ц
a BA
Дано : wОА 3с 1 ; e OA 4c 2 ;
a В cos 300 a A cos 300 a n A cos 600 a ц BA
aВ
a A cos 30 0 a n A cos 60 0 a ц BA
cos 30 0
78,3см / с 2
aВ cos 600 a A cos 600 a n A cos 300 a вр BA
a вр BA aВ cos 600 a A cos 600 a n A cos 300
a вр BA 39,15 8 31,21 16 e АВ АВ
e АВ 164 4с 2
25. Найти ускорения всех указанных точек и угловое ускорение диска.
a вр PBa
x
a вр CB
C
ц
CB
P
a
ц
Дано : wд 6с 1 ; r 2см; aB 78,3см / с 2
ц
В a DB
В
PB
Определить : a P ; aC ; aD ; e д
eд
a
DB
a
PB
a D aB a ц DB a вр DB
aВ
R
78, 3
2
39,15с 2
aB e д r
2
a вр PB e д r
проецируем на оси x и y :
a px a ц PB ; a py a вр PB a B 0
aP a ц PB w 2 д r 72см / с 2
(*)
a вр DB e д r 39,15 2 78,3см / с 2
Спроецируем (*) на оси координат
aDx a ц DB 72
DB
wд r 36 2 72см / с
y
aDy a
d (VВ )
dt R
2
ц
aB
вр
a P a B a ц PB a вр PB ;
D
вр
dw д
dt
aB 156,6
aD 72 2 156,6 2 172,4см / с 2
a ц DB wд r 36 2 72см / с 2
2
Аналогично определяем ускорение (.) С
aC aB a ц CB a вр CB
aСx a вр СB 78,3
aСy a ц СB aB 150,3
aС ( 78,3) 2 150,32 169,5см / с 2
26.
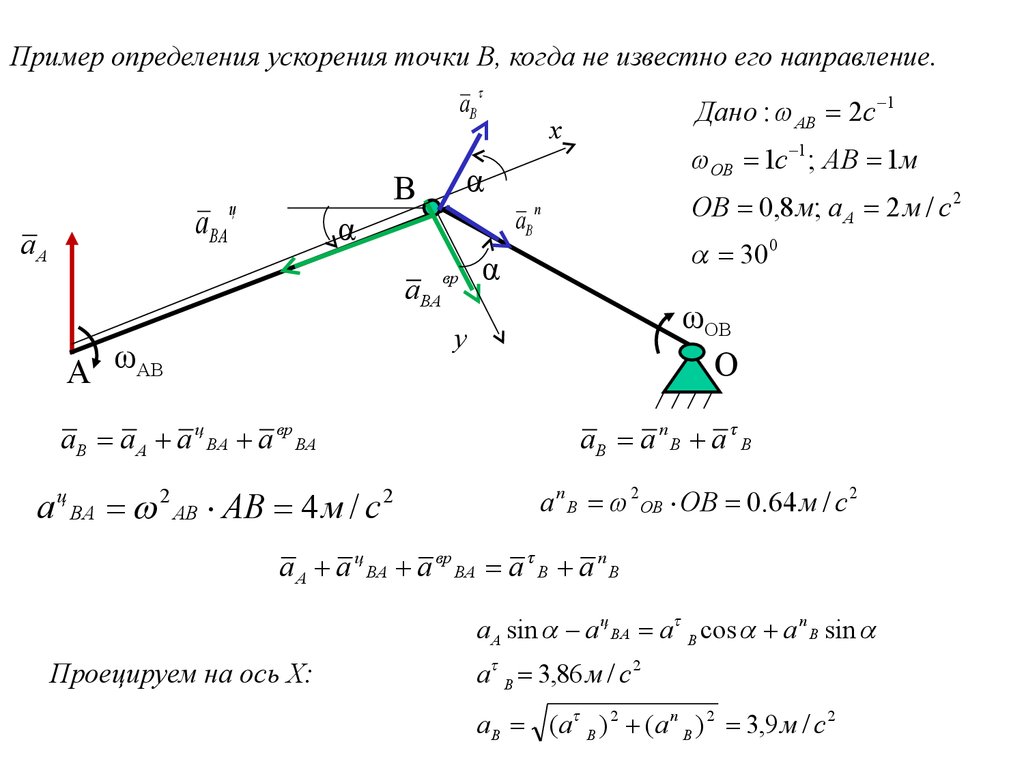
Пример определения ускорения точки В, когда не известно его направление.aB
aBA
aA
a
BA
w
aB
вр
OB 0,8 м; a A 2 м / с 2
n
30 0
α
ωOB
О
aB a n B a B
a B a A a ц BA a вр BA
2
wOB 1c 1 ; AB 1м
y
А ωAB
ц
x
α
aBA
Дано : w AB 2c 1
α
В
ц
AB
AB 4 м / с
2
a n B w 2 OB OB 0.64 м / с 2
a A a ц BA a вр BA a B a n B
a A sin a ц BA a B cos a n B sin
Проецируем на ось X:
a B 3,86 м / с 2
aB (a B ) 2 (a n B ) 2 3,9 м / с 2
27. Свойства плана ускорений
Построение плана ускорений.Свойства плана ускорений
• 1. Одноименные отрезки плана ускорений и механизма
прямо пропорциональны.
• 2. Одноименные фигуры плана ускорений и механизма
подобны.
• Одноименные отрезки плана ускорений и механизма
подобны и одноименные фигуры плана ускорений и
механизма повернуты друг относительно друга на угол α
= arctg(ԑ/ω2) , где ԑ и ω соответствующего звена
механизма
28. План ускорений Графическое изображение векторов ускорений точек плоской фигуры
a n A w 2 OA OA 36см / с 2 ; a A e OA OA 16см / с 2 ;C
a P w 2 д r 72см / с 2 ; a 10 c12 м. коэфф. ускорения
aP
P
B
aBA
ц
a BA
вр
o1n1
D
an A
a
3,6см
p1
n1
aB
60
A
a
A
n
a1
60
0
aA
wOA
k1
b1
e OA
O
aD a о1d1 10 17.3 173см / с 2
1,6см
PD BD CB r
p1d1 b1d1 b1c1
o1 p1
aP
a
7,2см
aB a A a ц BA a вр BA
a ц BA w 2 AB AB 36см / с 2
a1k1
a ц BA
a
3,6см
aB a o1b1 10 7,8 78см / с 2
PB
BD
BC PD; b1c1 p1d1
d1
a A
a
a A a o1a1 10 3,9 39см / с 2
о1
0
n1a1
p1b1
b1d1
1
с1
aС a о1с1 10 16,9 169см / с 2
29. Защита. Найти ускорение точки М или точки L (два способа).
C2
aP
P
aBA
aМ aB a ц МB a вр МB
B
ц
a BA
вр
aB
M
a ц МB wд r 72см / с 2
D
о1
p1
m1
n1
L
a
A
a1
600
A
n
600
aA
wOA
a вр МB e д r 78,3см / с 2
k1
b1
e OA
O
d1
с1