










 Электроника
ЭлектроникаПохожие презентации:







")


Электрические машины постоянного тока
1.
БГТУ «ВОЕНМЕХ» им. Д.Ф. Устиновакафедра электротехники, О8
Лекция 12
Электрические машины постоянного тока
1
2.
Классификация двигателей постоянного тока1. С независимым возбуждением
2. С постоянными магнитами
3.
Классификация двигателей постоянного токаIа IЯ IВ
3. Двигатель параллельным возбуждением
4.
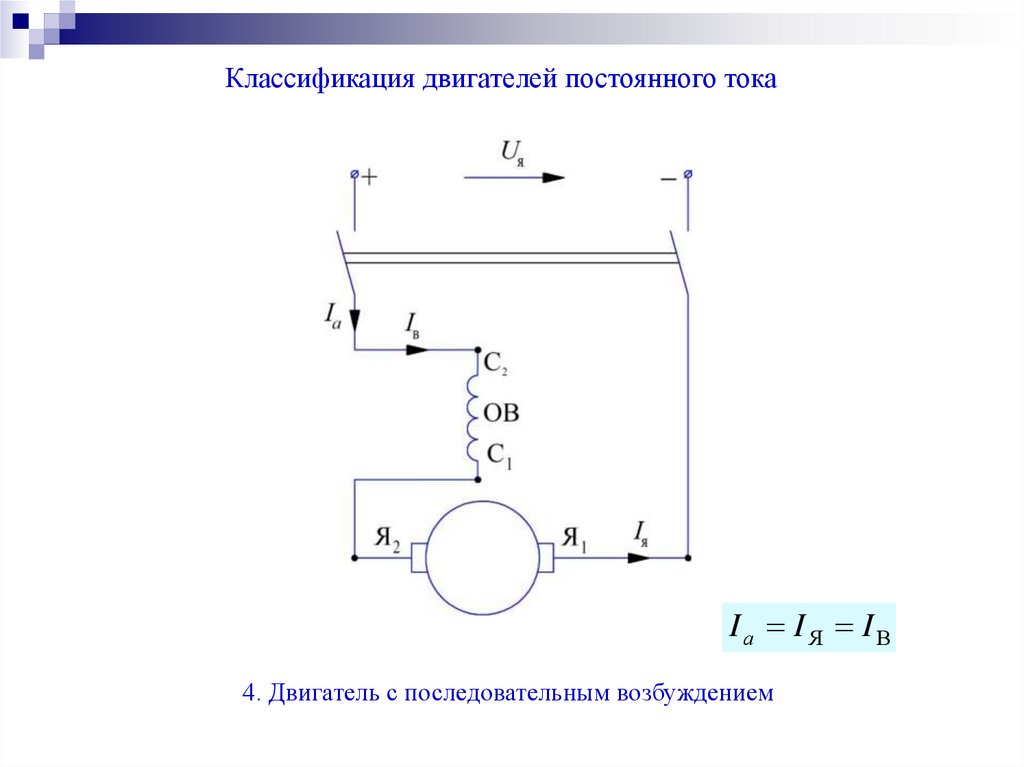
Классификация двигателей постоянного токаIа IЯ IВ
4. Двигатель с последовательным возбуждением
5.
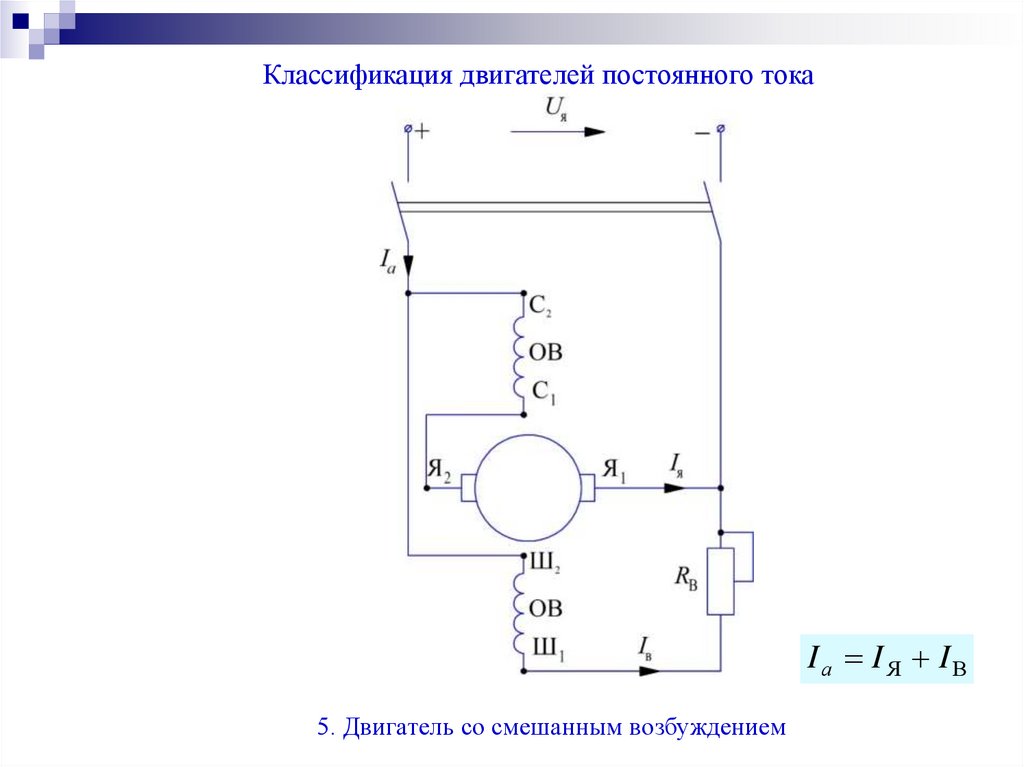
Классификация двигателей постоянного токаIа IЯ IВ
5. Двигатель со смешанным возбуждением
6.
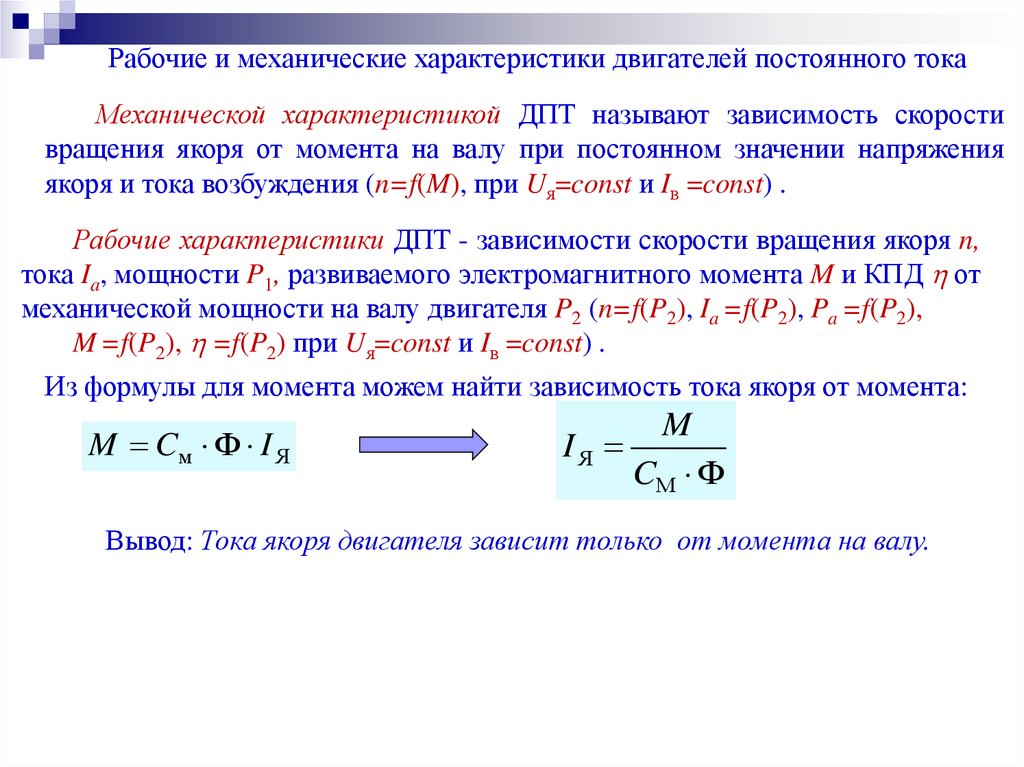
Рабочие и механические характеристики двигателей постоянного токаМеханической характеристикой ДПТ называют зависимость скорости
вращения якоря от момента на валу при постоянном значении напряжения
якоря и тока возбуждения (n=f(M), при Uя=const и Iв =const) .
Рабочие характеристики ДПТ - зависимости скорости вращения якоря n,
тока Ia, мощности P1, развиваемого электромагнитного момента M и КПД от
механической мощности на валу двигателя P2 (n=f(P2), Ia =f(P2), Pa =f(P2),
M =f(P2), =f(P2) при Uя=const и Iв =const) .
Из формулы для момента можем найти зависимость тока якоря от момента:
M Cм Ф I Я
M
IЯ
CМ Ф
Вывод: Тока якоря двигателя зависит только от момента на валу.
7.
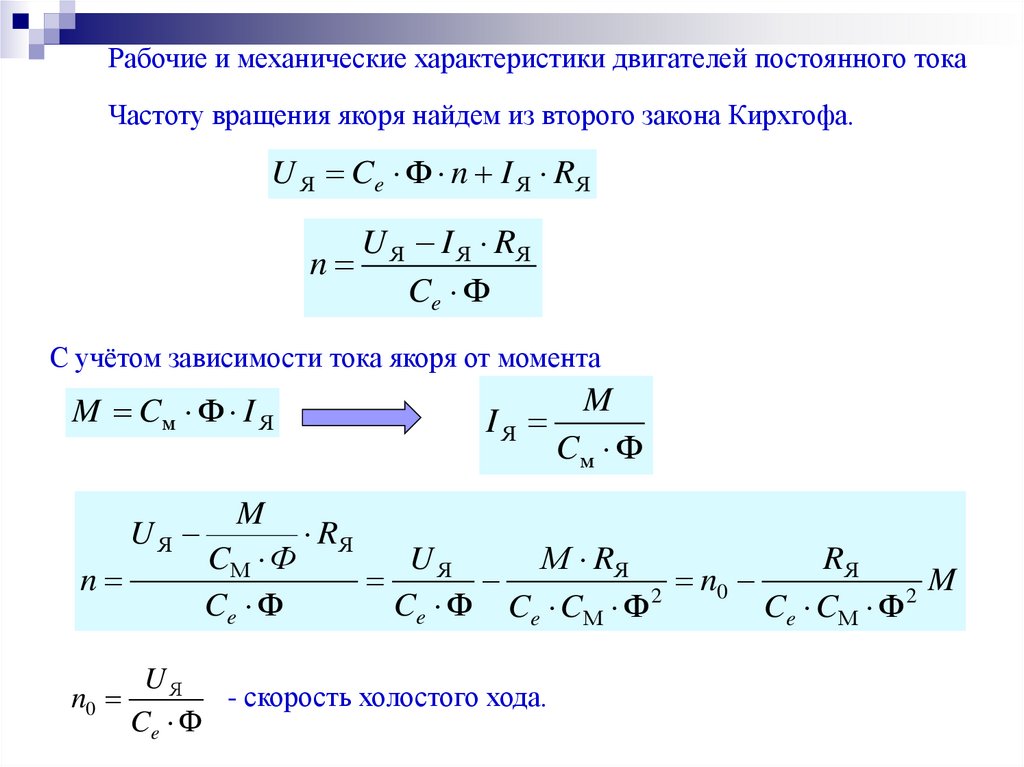
Рабочие и механические характеристики двигателей постоянного токаЧастоту вращения якоря найдем из второго закона Кирхгофа.
U Я C e Ф n I Я RЯ
U Я I Я RЯ
n
Ce Ф
С учётом зависимости тока якоря от момента
M Cм Ф I Я
UЯ
n
IЯ
M
Cм Ф
M
RЯ
CМ Ф
UЯ
М RЯ
RЯ
n0
M
2
2
Ce Ф
Ce Ф Ce CМ Ф
Ce CМ Ф
UЯ
- скорость холостого хода.
n0
Ce Ф
8.
Рабочие и механические характеристики двигателей постоянного токаПолезная мощность на валу двигателя тоже зависит от момента на валу
P2 M 2 f M
P2
M
2 f
Из приведенных уравнений видно, что все рабочие характеристике зависят
от момента на валу и магнитного потока.
Двигатели постоянного тока обладают саморегулированием, т.е. изменение
момента на валу переведет изменению скорости и тока якоря которые
обеспечивают устойчивый режим работы.
9.
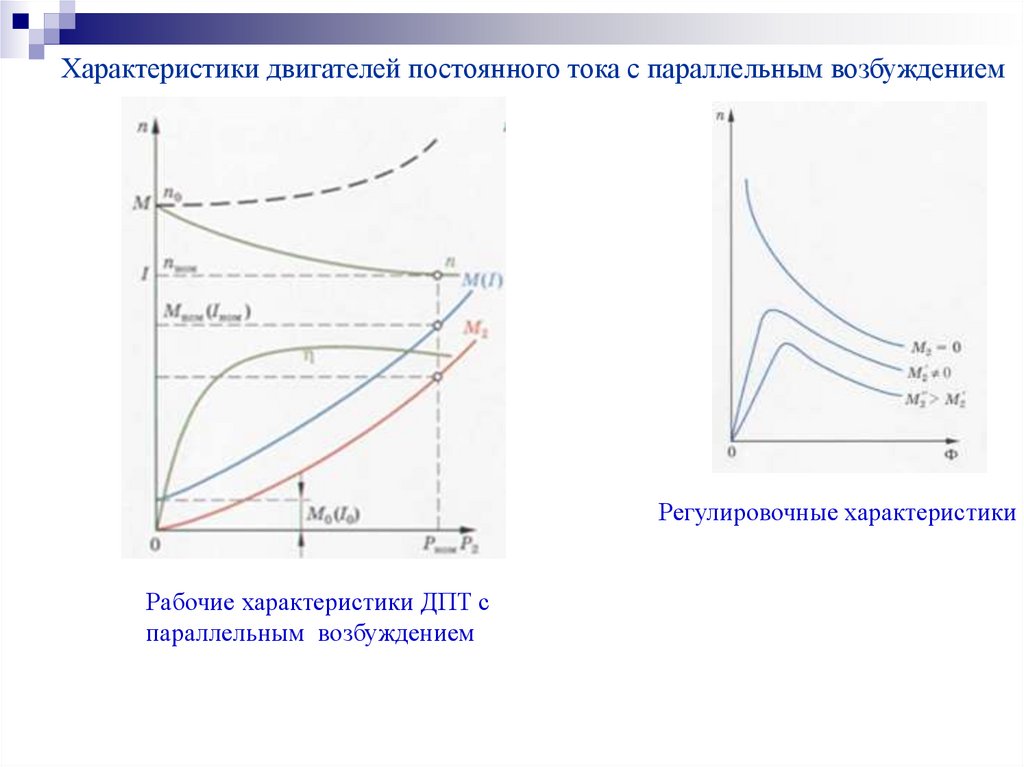
Характеристики двигателей постоянного тока с параллельным возбуждениемРегулировочные характеристики
Рабочие характеристики ДПТ с
параллельным возбуждением
10.
Реакция якоряВ режиме холостого хода магнитный поток Ф0 симметричный относительно
осевой линии машины.
Щетки машины располагают на геометрической нейтрали. Геометрическая
нейтраль – линия, перпендикулярная осевой линии магнитных полюсов машины.
При подключении нагрузки к обмоткам якоря, из - за тока якоря Iя возникает
магнитный поток якоря ФЯ.
Влияние магнитного потока якоря на основной магнитный поток называется реакцией
якоря.
Из - за влияния ФЯ магнитный поток становится неравномерным.
Линия проходящая через центр якоря и точки где магнитная индукция равна нулю
называется физической нейтралью. Поворот у генераторов в сторону вращения, а у
двигателей наооборот.
11.
Пуск двигателей постоянного токаВ момент пуска двигателей скорость n=0 об/мин. ЭДС якоря E=CеФn=0.
Следовательно пусковой ток якоря определяется:
I Я.п
UЯ
RЯ
Пусковой ток якоря во много раз больше номинального тока
I Я.п (10 20) I Я.ном
Резкое увеличение пускового тока является аварийным режимом. Поэтому необходимо
его ограничение.
Существуют следующие способы ограничения пускового тока:
1. пуск двигателя при пониженном значении напряжения якоря (безреостатный);
2. увеличение сопротивления цепи якоря при пуске (реостатный);
3. регулирование тока якоря электронными ключами.
12.
Реостатный пуск двигателей постоянного токаПри реостатном пуске двигателя пусковой ток якоря определяется выражением:
I Я.п
UЯ
RЯ RП
Сопротивление пускового реостата Rп выбирается
таким образом, чтобы
I Я.п (1,5 2,0) I Я.ном
По мере разгона машины ток якоря уменьшается
U Я E U Я Ce Фn
IЯ
RЯ RП
RЯ RП
Поэтому сопротивление постепенно уменьшает до 0.
В момент пуска, ток в обмотке возбуждения имеет максимальное значение,
т.е магнитный поток Ф0 максимальный!
13.
Способы регулирования скорости ДПТU Я I Я RЯ
n
Ce Ф
Скорость вращения зависит от напряжения питания Uя, тока якоря Iя и
магнитного потока Ф.
Существуют следующие способы:
1. изменять напряжение питания Uя при неизменном Rя и магнитного потока Ф;
2. изменять магнитный поток Ф при неизменном Uя при неизменном Rя ;
3. Изменять сопротивление Rя при неизменном Uя магнитного потока Ф.
n
n0
Uя1 > Uя.ном
Uя.ном
Uя2 < Uя.ном
M
14.
Способы регулирования скорости ДПТn
n0
n1
n2
n3
n
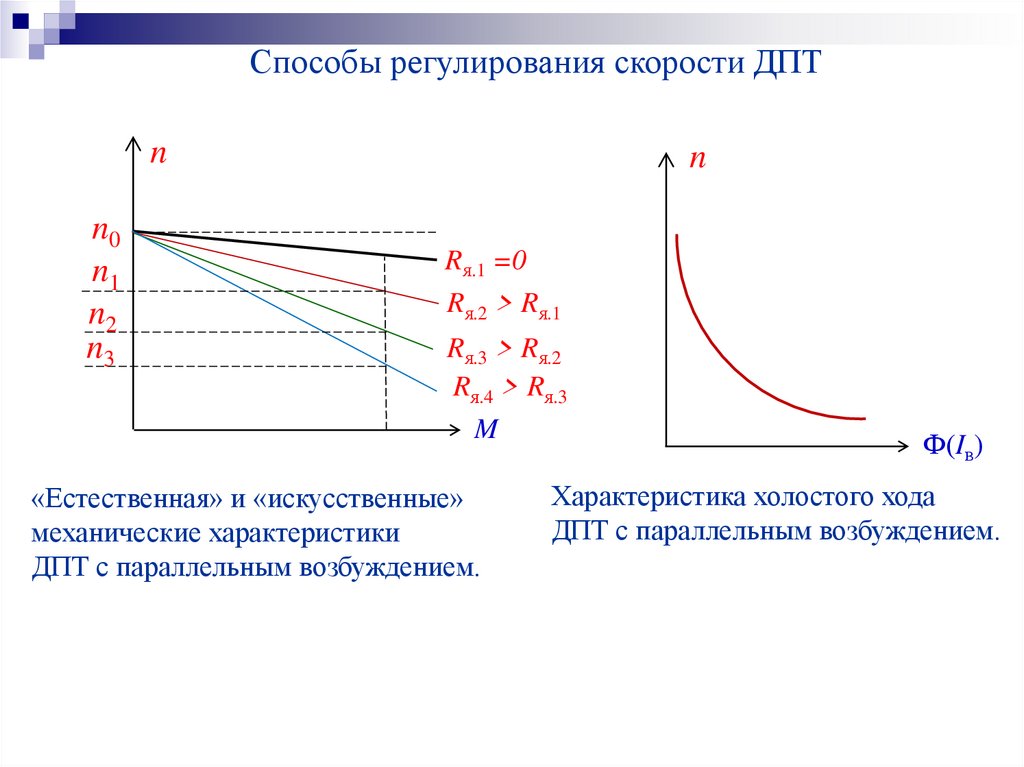
Rя.1 =0
Rя.2 > Rя.1
Rя.3 > Rя.2
Rя.4 > Rя.3
M
«Естественная» и «искусственные»
механические характеристики
ДПТ с параллельным возбуждением.
Ф(Iв)
Характеристика холостого хода
ДПТ с параллельным возбуждением.
15.
Способы регулирования скорости ДПТ с последовательнымвозбуждением
Регулирование скорости
n
U Я I Я ( RЯ Rc )
Ce Ф
Рабочие характеристики
16.
Управление ДПТИмпульсы напряжения и
тока
Механические характеристики
Схемы управления
Рабочие характеристики
17.
Универсальный коллекторный двигательОднофазный коллекторный двигатель
18.
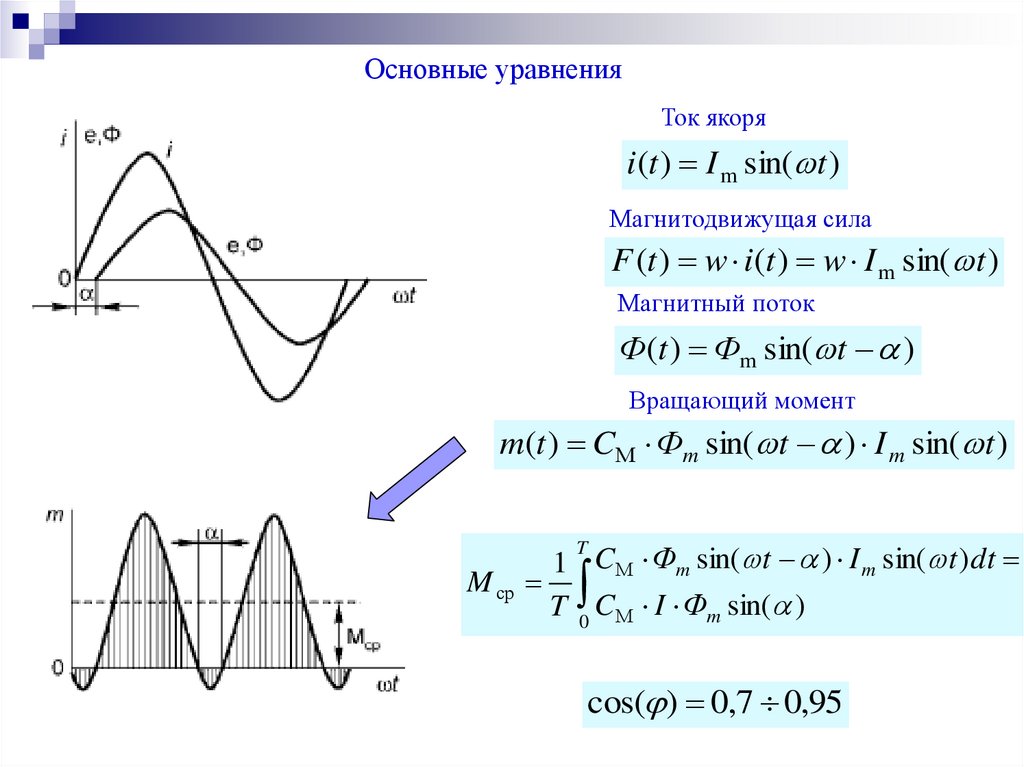
Основные уравненияТок якоря
i (t ) I m sin( t )
Магнитодвижущая сила
F (t ) w i (t ) w I m sin( t )
Магнитный поток
Ф(t ) Фm sin( t )
Вращающий момент
m(t ) CМ Фm sin( t ) I m sin( t )
M ср
T
1 CМ Фm sin( t ) I m sin( t )dt
T 0 CМ I Фm sin( )
cos( ) 0,7 0,95