









 Электроника
ЭлектроникаПохожие презентации:




")

")



Составление структурной схемы динамической модели двигателя постоянного тока с якорным управлением
1.
Практическое занятие 2 (4 часа)СОСТАВЛЕНИЕ СТРУКТУРНОЙ СХЕМЫ ДИНАМИЧЕСКОЙ
МОДЕЛИ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
С ЯКОРНЫМ УПРАВЛЕНИЕМ
2.
Во многих комплексах ЭП с машинами постоянного тока занимают центральное место,что обусловлено такими преимуществами, как
широкий диапазон плавного
регулирования угловой скорости электродвигателя (ЭД) Ωдв, линейность механических
характеристик, значительная величина пускового момента, высокий КПД (до 90%), высокая
надежность. Основным недостатком является наличие коллектора.
Применяют три способа регулирования угловой скорости:
изменением управляющего напряжения (якорное управление),
изменением потока возбуждения (полюсное управление)
изменением сопротивления в цепи якоря Rя.
В ЭП автоматических систем нашли применение первые два способа управления, а
также комбинированное управление.
Полюсное управление является наиболее простым и экономичным.
Однако возможность плавного регулирования угловой скорости двигателя в широких
пределах и обеспечение постоянной жесткости механических характеристик посредством
якорного управления определило широкое использование этого способа в ЭП различных
комплексах.
Поэтому ниже более подробно рассмотрим ЭП с двигателем постоянного тока с
якорным управлением (ДПТЯУ).
3.
Динамические свойства силового канала ЭП сэлектрического равновесия
U у K е дв I я Rя Lя
dI я
,
dt
ДПТЯУ описываются уравнением
(2.1)
где Kе – коэффициент противо ЭДС;
Ωдв – угловая скорость вращения вала ЭД;
Iя – ток якоря;
Rя – сопротивление цепи якоря;
Lя – индуктивность обмотки якоря,
и уравнением механического равновесия
J
где
J
J J дв, р н
i2
d дв
М
M вр с ,
dt
iη
(2.2)
– суммарный момент инерции, приведенный к валу ЭД.
Уравнения (2.1) и (2.2) являются исходными для построения структурных схем
динамической модели привода, широко используемых
при проектировании
автоматических систем.
Для получения структурных схем силового канала ЭП с ДПТЯУ применим прямое
преобразование Лапласа к уравнениям (2.1) и (2.2), обозначив
- вращающий момент
Мвр=KмIя (Kм - коэффициент момента).
4.
U у K е дв I я Rя LяJ
dI я
,
dt
(2.1)
d дв
М
M вр с ,
dt
iη
(2.2)
Uу = Kе Ωдв + IяRя (1+Тэ s);
(2.3)
Тогда
Js Ω дв Kм I я
где
L
Тэ я
Rя
Мс
,
iη
(2.4)
– электромагнитная постоянная времени двигателя.
Исключим из (2.3), (2.4) промежуточную переменную Iя и запишем полученное
выражение в стандартной форме, относительно регулируемого параметра Ωдв
(Т эТ м s 2 Т м s 1) Ω дв K двU у
где
Тм
JRя
Kм Kе
1
(Т э s 1) М с ,
i η Kд
(2.5)
– электромеханическая постоянная времени двигателя;
K дв
1
Kе
– коэффициент передачи двигателя по скорости;
Kд
Kм Kе
Rя
– коэффициент демпфирования.
5.
(Т эТ м s 2 Т м s 1) Ω дв K двU у1
(Т э s 1) М с ,
i η Kд
(2.5)
Согласно (2.5), будем иметь
Ω дв
Т s 1
( K двU у э
Mс) .
iηK д
Т эТ м s 2 Т м s 1
1
(2.6)
Структурная схема динамической модели силового канала ЭП, соответствующая (2.6), с
учетом обозначения Ω = KрΩдв ( K р 1 - коэффициент передачи редуктора) принимает
i
вид (рис. 2.7).
Рис.2.1. Структурная схема динамической модели электропривода с ДПТЯУ
Из схемы (рис. 2.1) несложно определить передаточные функции силового канала ЭП
относительно угловой скорости вращения исполнительного вала по управляющему
воздействию
K дв
Ω( s)
WUу (s)
(2.7)
2
Uу( s)
i (Т эТ м s Т м s 1)
6.
и по моменту сопротивленияWМс (s)
Т эs 1
Ω( s )
( 1)
.
М с (s)
i 2 ηK д (Т эТ м s 2 Т м s 1)
(2.8)
Рис.2.1. Структурная схема динамической модели электропривода с ДПТЯУ
Из выражений (2.7) и (2.8) видно, что динамические свойства ЭП, относительно
угловой скорости, описываются передаточными функциями с характеристическими
многочленами второго порядка.
Для двигателей, как правило, выполняется условие
Тм > 4Tэ .
(2.9 )
Условие
Тм < 4Tэ
наблюдается редко.
(2.10)
7.
На рис. 2.2, 2.3, 2.4, 2.5 показаны графики зависимости угловой скорости Ω,полученные для соотношений (2.9) и (2.10). При моделировании были заданы следующие
входные воздействия и параметры ЭП: Uу = 60 B; Мс = -10 Hм; i=10; Kд=0,625 Hмс/рад;
Kдв=2 рад/B·с; η = 0,8.
Рис.2.2. График зависимости угловой скорости по управляющему воздействию (ТМ 4ТЭ)
Рис.2.3. График зависимости угловой скорости по моменту сопротивления (ТМ 4ТЭ)
8.
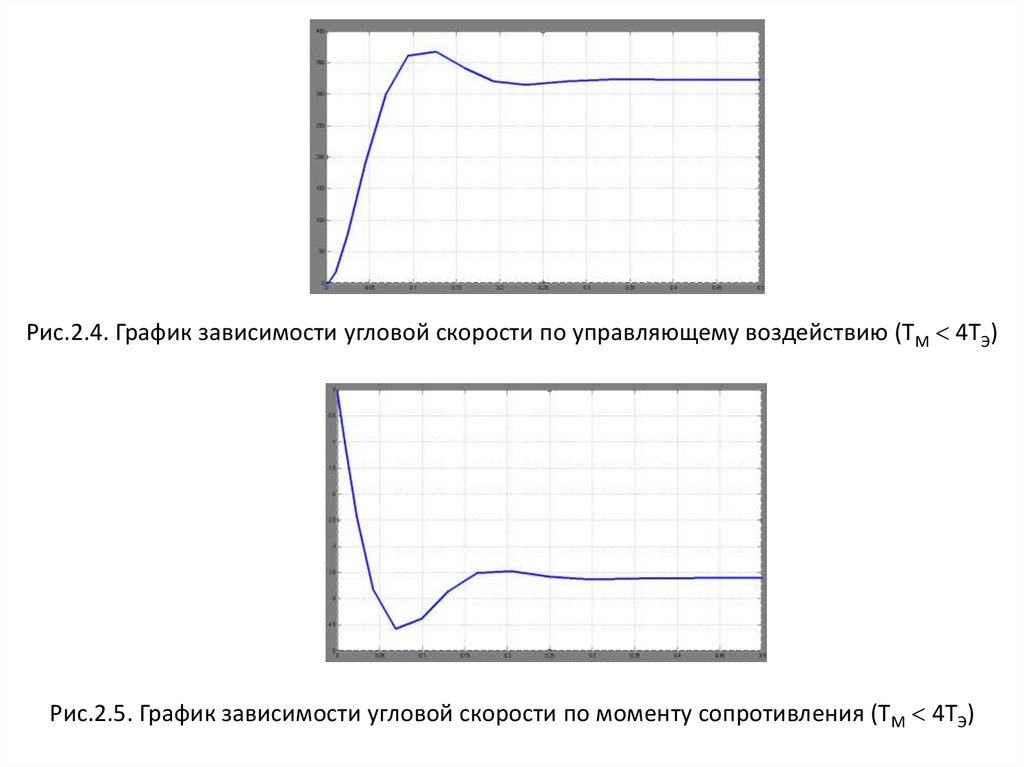
Рис.2.4. График зависимости угловой скорости по управляющему воздействию (ТМ 4ТЭ)Рис.2.5. График зависимости угловой скорости по моменту сопротивления (ТМ 4ТЭ)
9.
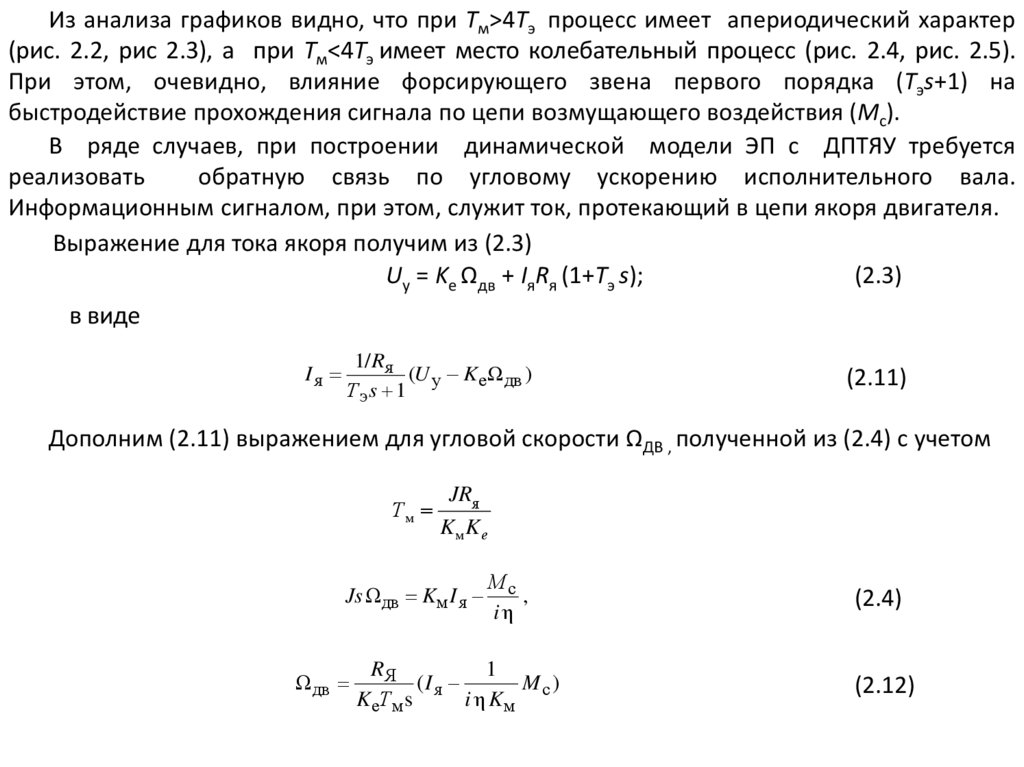
Из анализа графиков видно, что при Тм>4Tэ процесс имеет апериодический характер(рис. 2.2, рис 2.3), а при Тм<4Tэ имеет место колебательный процесс (рис. 2.4, рис. 2.5).
При этом, очевидно, влияние форсирующего звена первого порядка (Тэs+1) на
быстродействие прохождения сигнала по цепи возмущающего воздействия (Мс).
В ряде случаев, при построении динамической модели ЭП с ДПТЯУ требуется
реализовать
обратную связь по угловому ускорению исполнительного вала.
Информационным сигналом, при этом, служит ток, протекающий в цепи якоря двигателя.
Выражение для тока якоря получим из (2.3)
Uу = Kе Ωдв + IяRя (1+Тэ s);
(2.3)
в виде
Iя
1/Rя
(U у K еΩ дв )
Тэs 1
(2.11)
Дополним (2.11) выражением для угловой скорости ΩДВ , полученной из (2.4) с учетом
Тм
JRя
Kм Kе
Js Ω дв Kм I я
Ω дв
Мс
,
iη
RЯ
1
(I я
Mс)
K еТ мs
i η Kм
(2.4)
(2.12)
10.
IяΩ дв
1/Rя
(U у K еΩ дв )
Тэs 1
RЯ
1
(I я
Mс)
K еТ мs
i η Kм
(2.11)
(2.12)
На основании (2.11 ) и (2.12 ) построим соответствующую ССДМ, изображенную на
рис. 2.6.
Рис.2.6. Структурная схема динамической модели электропривода с ДПТЯУ